
Enhancing Object Detection with YOLOv8 Transfer Learning: A
VOC2012 Dataset Study
Nan Zhao
a
Computer Science, University of Liverpool, Liverpool, U.K.
Keywords: Object Detection, Transfer Learning, YOLOv8, VOC2012 Dataset.
Abstract: Object detection has received widespread attention due to its use in a large number of practical scenarios. In
this paper, the primary objective is to develop and evaluate a transfer learning-based object detection
framework using the you only look once v8 (YOLOv8) model. The study investigates the performance and
parameter influence of YOLOv8 when trained on custom datasets through transfer learning methodologies.
Firstly, this paper introduces the Vision Object Classes (VOC) 2012 dataset as the primary input data.
Subsequently, the YOLOv8 model is configured as the foundational network for feature extraction and object
detection tasks. Additionally, transfer learning techniques are applied to enhance the model's generalizability.
Thirdly, key parameters are adjusted and compared for thorough analysis. Furthermore, the YOLOv8
predictive performance is assessed and juxtaposed with results obtained from the COCO dataset. The
experimental findings highlight the robust performance of YOLOv8 on the VOC2012 dataset. This study
offers valuable insights and serves as a reference for researchers in the field, shedding light on effective
strategies for object detection using transfer learning approaches.
1 INTRODUCTION
Object detection is an important task in the computer
vision, which is one of core problems in computer
vision (Ma, 2024). The task of object detection finds
objects that all of objects, images and videos are
interested in, and makes sure classification and
position of object. Light interference and occlusion in
target detection processes is challenging on computer
vision because different objects have different
appearance, posture, imaging (Ma, 2024). Since the
introduction of deep learning with object detection,
most of object detectors are divided into two classes.
Firstly, detection methods are region-based. System
based on region is known two-stage detectors, which
makes sure the candidate box of the sample and then
using convolutional neural networks (CNN) (such as
Regional CNN(R-CNN)) classifies the samples (Ma,
2024). Secondly, detection methods are regression-
based. System based on regression is known single-
stage detectors, which does not product the candidate
box of the sample in processing and implement target
detection directly based on specific regression (Ma,
a
https://orcid.org/0009-0003-3262-8628
2024). The difference of two classes is that detector
accuracy of two steps is better than one step detector,
but real-time detectors performance of two steps is
low (Ma, 2024). Researchers pay more attention to
the each-step detector because each-step detector has
comprehensive performance and excellent operating
efficiency, you only look once (YOLO) is the most
common example of the single step detector (Ma,
2024).
YOLO models mean “You Only Look Once”
series of models about object detect, which have very
high influence on computer vision (Ma, 2024).
YOLO models keep real-time performance and
achieves high accuracy, which apply for surveillance,
vehicle navigation and automatic image labelling, etc
(Ma, 2024). YOLOv8 is one model of “You Only
Look Once” series of object detection models, which
is famous for efficiency and speed in the detecting
objects of images and videos (Jönsson, 2023). There
are some key features and enhancements of YOLOv8.
YOLOv8 continuingly improve detection accuracy in
order to become one of the fastest and the most
accurate object detect models (Soylu, 2023).
Zhao, N.
Enhancing Object Detection with YOLOv8 Transfer Learning: A VOC2012 Dataset Study.
DOI: 10.5220/0012939600004508
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024), pages 429-434
ISBN: 978-989-758-713-9
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
429
Architecture of YOLOv8 is refined and optimized,
which increases performance on a variety of hardware
platforms from high-end GPUs to edge devices and
makes sure wider accessibility and applicability
(Xiao, 2023). YOLOv8 includes the latest advances
in machine learning and deep learning and uses
enhanced training techniques to improve model
ability from generalize training data to real-world
scenarios, which decreases overfitting and improve
detection performance on unseen data (Das, 2024).
YOLOv8 is more robust to different types of input
data differences (such as lighting, occlusions, and
objects of different scales), which makes more
reliable in the diverse and challenging environment
(Aboah, 2023). YOLOv8 usually supports much
wider object class, which makes more versatile and
useful in the different fields and applications
(Motwani, 2023). YOLOv8 is easily integrated with
existing software and platforms and has more
compatibility and support for various programming
languages and frameworks (Luo, 2024). Although
YOLOv8 represents the cutting edge of object
detection technology, each iteration of YOLOv8
focuses on balancing trade-offs between speed,
accuracy and computational requirements (Reis,
2023).
The main object of this research analysises a
transfer learning that bases on object detection
framework using the YOLOv8 model. The research
investigates the performance and parameter influence
of YOLOv8 when trained on custom datasets through
transfer learning methodologies. Firstly, the paper
introduces the VOC2012 dataset as the primary input
data. Subsequently, the YOLOv8 model is configured
as the foundational network for feature extraction and
object detection tasks. Additionally, transfer learning
techniques are applied to enhance the model's
generalizability. Thirdly, key parameters are adjusted
and compared for thorough analysis. Furthermore, the
YOLOv8 predictive performance is assessed and
juxtaposed with results obtained from the COCO
dataset. The experimental findings highlight the
robust performance of YOLOv8 on the Vision Object
Classes (VOC) 2012 dataset. This study offers
valuable insights and serves as a reference for
researchers in the field, shedding light on effective
strategies for object detection using transfer learning
approaches.
2 METHODOLOGIES
2.1 Dataset Description and
Preprocessing
The PASCAL VOC dataset (Pascal, 2012) is widely
used for object detection, segmentation, and
classification tasks, serving as a benchmark for
computer vision models. It comprises two main
challenges, VOC2007 and VOC2012, with
annotations including bounding boxes and class
labels for object detection and segmentation masks.
The VOC2012 subset, used in this study, contains
11,530 images with annotations for 27,450 objects
and 6,929 segmentations. Data preprocessing
involves resizing and normalization, with a Python
script converting annotations into the required format
for YOLOv8. This project employs the VOC dataset
to train and analyze YOLOv8's performance,
comparing it against the original COCO dataset.
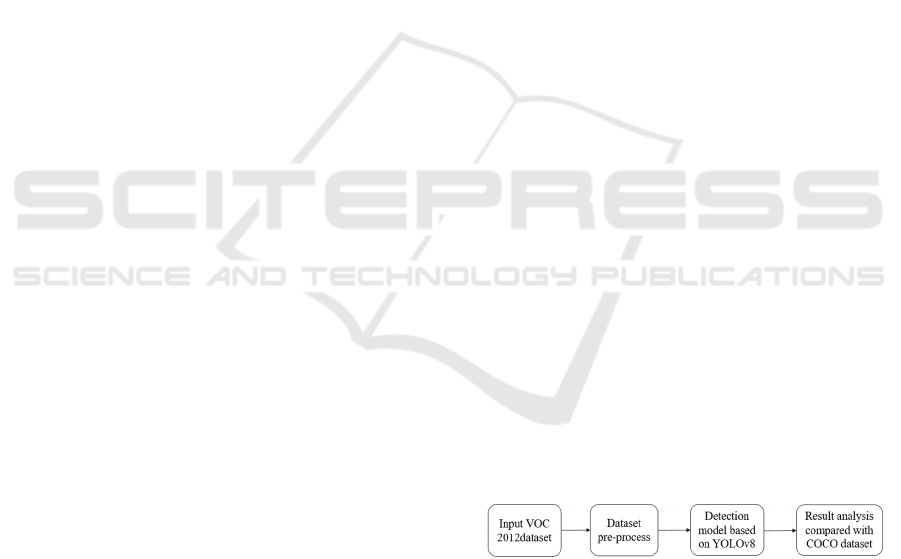
2.2 Proposed Approach
The main purposes of this paper are to construct and
analysis target detection based on transfer learning by
using YOLOv8 model (as shown Figure 1). Using
transfer learning research YOLOv8 training on
performance of custom dataset and influence of
parameters. Specifically, firstly the VOC2012 dataset
is used to the data input for this paper. Secondly,
Constructing the YOLOv8 model is as the basic
network for feature extraction and target detection
tasks, at the same time, using transfer learning
techniques generalizes model performance further.
Thirdly, core parameters need to be adjusted and
comparatively analysed. Additionally, this paper
analysis performance of prediction based on
YOLOv8 model, and compares with the COCO
dataset.
Figure 1: The framework of the YOLOv8 model
(Photo/Picture credit: Original).
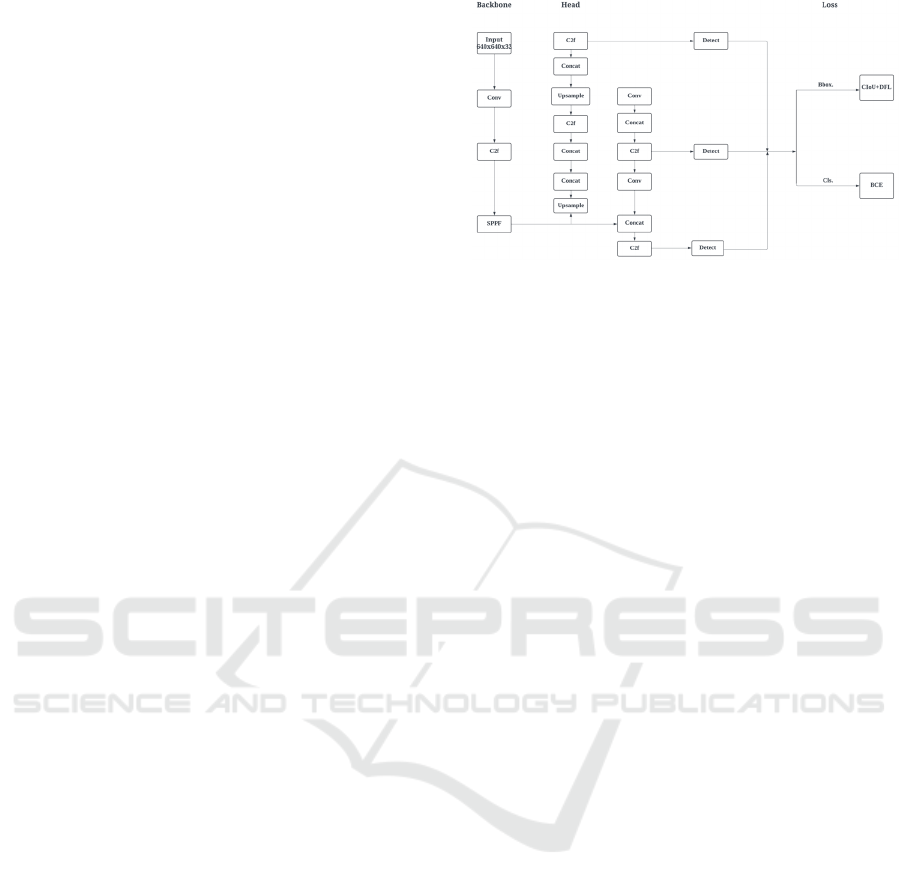
2.2.1 YOLOv8
YOLOv8 mainly uses the Ultralytics framework and
the core of feature shows in the Figure 2, YOLOv8
provides a new the model of SOTA that includes P5
640 and P6 1280 resolution of object detect network
and model of example segmentation by using
YOLACT. Factors of scaling provide models of
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
430
different sizes in N/S/M/L/X scales in order to satisfy
different requirements, which is the same as
YOLOv5. The main YOLOv8 model has network of
a backbone, head of a detection, and function of a
Loss. Typically, the layer of input is an image of
predefined size, which often is a mage size multiple
of 32.
The network of backbone and Neck refer to the
YOLOv7 design idea, using the C2f
(CSPLayer_2Conv) structure with richer gradient
flow replaces the C3 structure of YOLOv5, and
adjusting different channel numbers for different
scale models.
The model structure of YOLOv8 is fine-tuned and
greatly improves the performance of model. But
YOLOv8 model exists some operations such as Split
are, which is not as friendly to specific hardware
deployments as before (Reis, 2023).
The Head part has more changing than YOLOv5,
which replaces by the current mainstream decoupled
head structure, and separates the classification and
detection heads, Anchor-Based changes Anchor-Free
at the same time (Reis, 2023). YOLOv8 uses dual
FPN that is similar with feature extracting mechanism
of PAN-FPN on the YOLOv5 in the feature detector.
Dual-FPN extracts uses multiple convolution and
pooling operations to effectively extract information
of features that are from the input image, which
quickly and effectively achieves performance of
detection (Reis, 2023).
The detection layer is responsible to task of object
detection that is features extracted through the
network of backbone, YOLOv8 predicts bounding
box locations and classes through specific
convolutional and connection layers. The output layer
is used to output information of detection object that
includes its category, location, and score of
confidence. Result of detection object by the output.
The final output need use Non Maximum Suppression
(NMS) to eliminate bound boxes of overlap, and use
highest confidence as box of the bounding (Reis,
2023). The calculation of loss uses positive and
negative sample allocation strategy of
TaskAlignedAssigner. The training data augment
need close enhancement of mosaic in YOLOX for the
final10 epochs, which could effectively increase the
accuracy (Reis, 2023). In this paper, using YOLOv8
model trains VOC2012 dataset and COCO dataset in
order to analysis performance of objection detection.
Figure 2: Model structure of YOLOv8 detection model
(Photo/Picture credit: Original).
2.2.2 Loss Function
The process of Loss calculation has two parts that are
positive and negative sample allocation strategy and
Loss calculation. The YOLOv8 model firsthand uses
TaskAlignedAssigner of TOOD due to strategy
excellence of the dynamic allocation.
TaskAlignedAssigner mainly uses classification and
regression scores that are weighted to select positive
samples.
ts
αβ
μ
=+
(1)
s is score of the prediction about the annotation
classes, u means the Intersection Over Union (IoU)
that is the prediction box and the Ground Truth (GT)
box, and multiplying of s and u is the degree of
alignment.
For each GT, all prediction boxes are based on the
classification score about the GT classes. The
weighting of IoU that is the prediction box and GT
obtains alignment metrics of an alignment score
related to classification and regression. The
maximum top K is directly selected based on the
alignment metrics alignment score as a positive
sample. Loss calculation includes classification and
regression branches without the previous objection
branch. Binary cross entropy (BCE) Loss is used to
the branch of classification. Distribution Focal Loss
and IoU Loss is used to the regression branch. Three
Losses require a certain ratio of weight plus.
2.3 Implementation Details
This paper chooses to pre-training to initialize the
model and then training on a VOC2012 dataset and
COCO dataset. These weights are from a model
trained on the VOC2012 dataset and COCO dataset.
Hyper-parameter tuning approach is used by having
access to RTX 3080Ti. Configuration file uses
Enhancing Object Detection with YOLOv8 Transfer Learning: A VOC2012 Dataset Study
431
YAML and modifying hyper-parameters uses CLI
parameters. Using VOC2012 dataset that the image
size is 640 trains YOLOv8n for 500 epochs. Using
two GPUs that CUDA devices are 2 and 3 trains
YOLOv8n model. Using COCO dataset that the
image size is 640 trains YOLOv8n for 500 epochs.
Using three GPUs that CUDA devices are 0, 1, 2
trains YOLOv8n model, because multi-GPU training
makes more efficient use of available hardware
resources by distributing training load across multiple
GPUs.
In this paper, box loss of training and class loss of
training, distribution focal loss of training
respectively present boxes loss of the bound in the
train, class loss of training, and distribution focal loss
of training. Validation box loss and validation class
loss, validation distribution focal loss respectively
indicates boxes loss of the bound in the validation,
class loss of validation, and distribution focal loss of
validation. Mean average precision (mAP) is a
popular evaluation metric in the object detection,
mAP uses average precision of all classes and
maculates them according to pre-specified threshold
of intersection over union. mAP50(B) of metrics and
recall(B) of metrics use the metrics of model
evaluation, intersection of union (IoU) in the mean
average precision(mAP) is 0.50 that means the
mAP50, B is a type of segmentation metrics, for
example, precision (B) of metrics is detection and
precision(M) of metrics is segmentation (Reis, 2023).
Metrics/mAP50 (B) indicates that using steps of 0.05
starts from an IoU threshold of 0.5 and stops at 0.95,
taking average precision (AP) in this interval then all
of classes do this and take average in all of classes,
which product mAP50 (B) of Metrics (Reis, 2023).
Precision-recall visualizes the balance in precision
and recall, which make accuracy selective prioritize,
the chosen threshold determines the specific
precision-recall values (Reis, 2023). F1-confidence is
a measure of balanced performance at different
confidence levels, which combines precision and
recall, the peak means the confidence level where the
model arrives the best trade-off both precision and
recall in the specific dataset (Reis, 2023).
3 RESULTS AND DISCUSSION
This research compares VOC2012 dataset with
COCO dataset about performance of object detection
by training YOLOv8 model. Using the train box loss,
train class loss, train distribution focal loss (dfl),
precision(B) of metrics, recall(B) of metrics,
mAP50(B) of metrics, mAP50-95(B) of metrics,
validation box loss, validation class loss, distribution
focal loss of validation, precision and recall, F1-
Confidence and Precision-Recall to evaluate
performance of object detection.
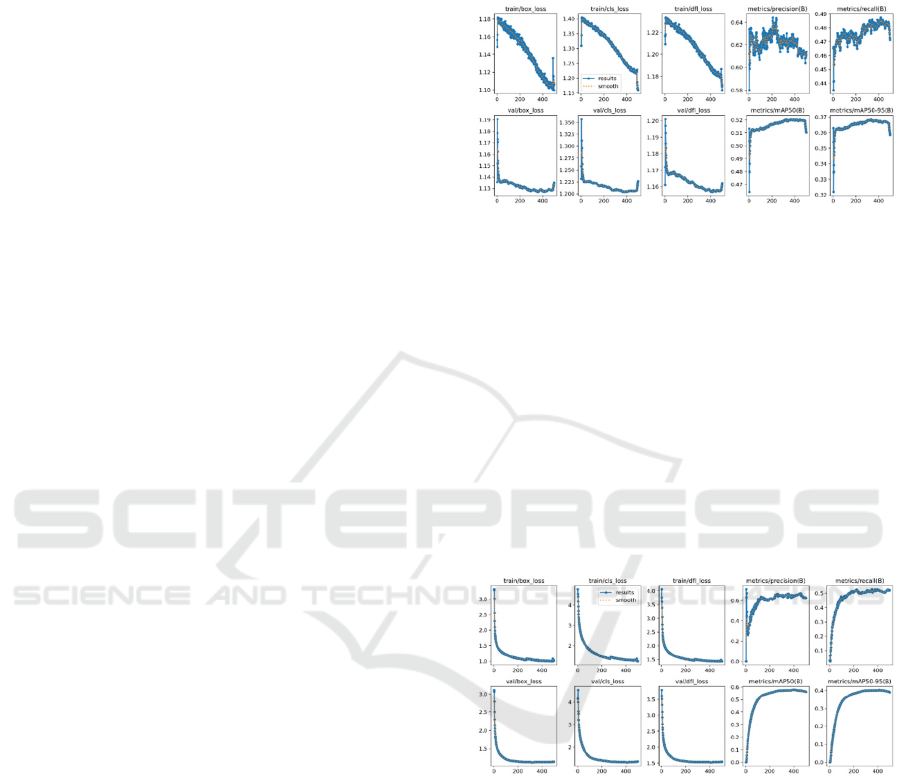
Figure 3: The result of COCO dataset
(Photo/Picture credit:
Original).
Figure 3 shows that box loss (box_loss),
distribution focal loss (dfl_loss) and class loss
(cls_loss) determine the best epochs (490) on the best
result of object detect about coordinates of bounding
box in the train and validation COCO dataset.
Precision (B) has the selection of the best epochs (240)
and Recall (B) has the selection of the best epochs
(321) during training. The Map50 (B) and Map50-95
(B) have the selection of the best epochs (391).
Analysis of these curves enables the selection of the
best epochs in order to achieve best results in object
detection on the COCO dataset.
Figure 4: The result of VOC2012 dataset
(Photo/Picture
credit: Original).
Figure 4 shows that box loss (box_loss),
distribution focal loss (dfl_loss) and class loss
(cls_loss) determine the best epochs (400) for the best
object detection about the coordinates of bounding
box during train and validation VOC2012 dataset.
Precision (B) has the optimal number of epochs (161)
and Recall (B) has the best epochs (223) during
training. The Map50 (B) has the best epochs (161)
and Map50-95 (B) have the optimal number of
epochs (397). Analysis of these curves enables the
selection of the best epochs (240) in order to achieve
the best results in object detection on the VOC2012
dataset.
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
432
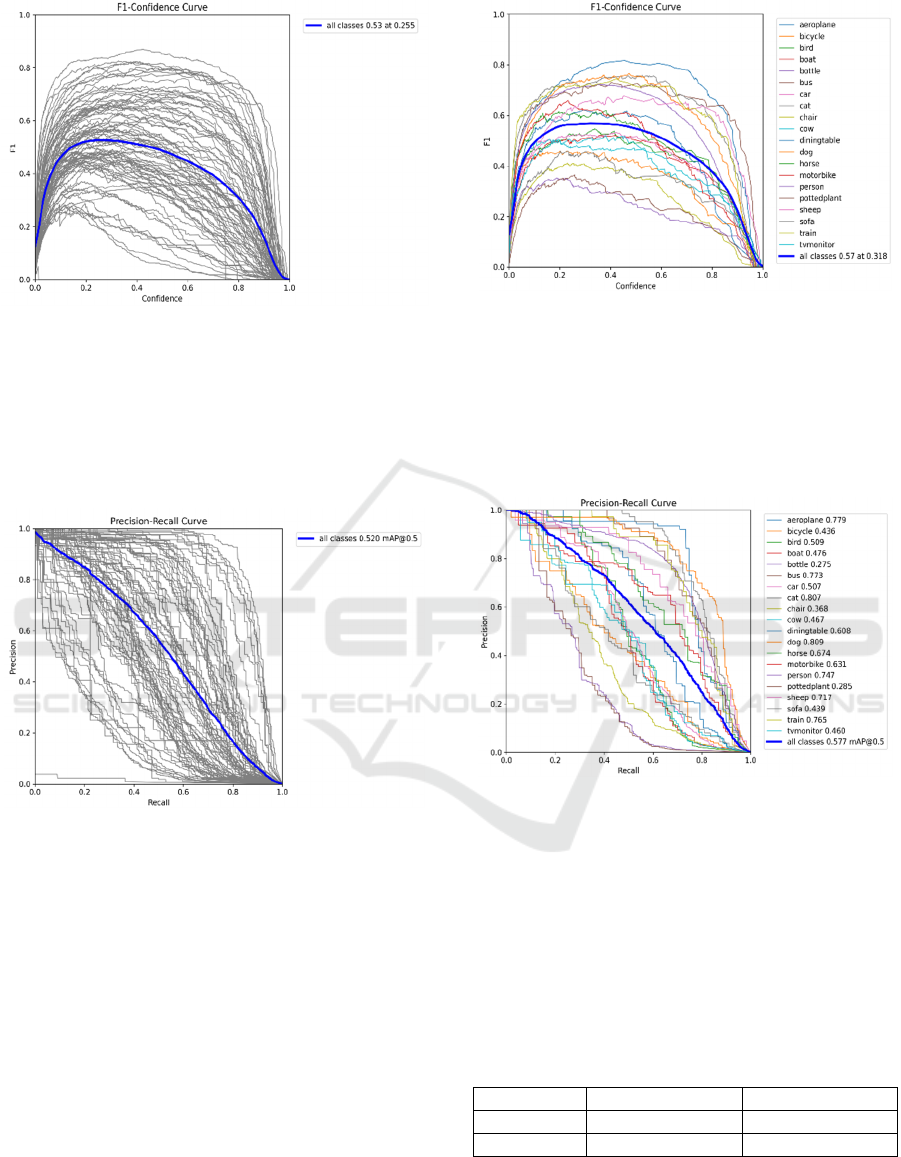
Figure 5: F1-Confidence on the COCO dataset
(Photo/Picture credit: Original).
"All classes 0.53 mAP at 0.255" means that YOLOv8
model of the object detection achieved an average
precision of 53% across all classes of objects, with a
confidence threshold of 0.255 for determining correct
detections on the COCO dataset (as shown Figure 5).
Figure 6: Precision-Recall on COCO dataset
(Photo/Picture
credit: Original).
"All classes 0.52 mAP @ 0.5" indicates that the
YOLOv8 model of object detection gets a mean
Average Precision that is 0.52 through all classes in
the dataset, evaluation of predicted accuracy on the
bounding boxes in the COCO dataset uses an
Intersection of Union threshold that is 0.5 (as shown
Figure 6).
Figure 7: F1-Confidence on the VOC2012 dataset
(Photo/Picture credit: Original).
"All classes 0.57 mAP at 0.318" means that YOLOv8
model of the object detection achieved an average
precision of 57% across all classes of objects, with a
confidence threshold of 0.318 for determining correct
detections on the COCO dataset (as shown Figure 7).
Figure 8: Precision-Recall on VOC2012 dataset
(Photo/
Picture credit: Original).
"All classes 0.577 mAP @ 0.5" indicates that the
YOLOv8 model of object detection gets a mean
Average Precision that is 0.577 through all classes in
the dataset, evaluation of predicted accuracy on the
bounding boxes in the COCO dataset uses an
Intersection of Union threshold that is 0.5 (as shown
Figure 8).
Table 1: Comparing performance in COCO and VOC2012
dataset on the YOLOv8.
dataset F1- confidence Precision- Recall
COCO 0.53 mAP at 0.255 0.52 mAP @ 0.5
VOC2012 0.57 mAP at 0.318 0.577 mAP @ 0.5
F1-confidence is 0.57 mAP at 0.318 and Precision-
Recall is 0.577 mAP @0.5 on the VOC2012 dataset,
as shown in the Table 1. F1-confidence is 0.53 mAP
Enhancing Object Detection with YOLOv8 Transfer Learning: A VOC2012 Dataset Study
433

at 0.255 and Precision- Recall is 0.52 mAP @0.5 on
the COCO dataset. F1-confidence and Precision-
Recall on the VOC2012 dataset are higher than
COCO dataset VOC2012 from the table1. A higher
mAP score generally indicates better performance.
Therefore, the performance of VOC2012 dataset on
the YOLOv8 is better than VOC2012 dataset on the
YOLOv8.
4 CONCLUSIONS
This study introduces an investigation into object
detection using the YOLOv8 model applied to both
the COCO and VOC2012 datasets. The primary
objective is to assess the performance of the model by
analyzing key metrics such as F1-Confidence and
Precision-Recall across these datasets. Upon
comparison, it is evident that the VOC2012 dataset
outperforms the COCO dataset in terms of F1-
Confidence and Precision-Recall scores. Through
meticulous experimentation and analysis, the study
confirms the superior performance of the YOLOv8
model on the VOC2012 dataset relative to COCO.
Looking ahead, future research endeavors will
prioritize expanding the dataset size to enhance the
robustness and accuracy of the analysis. It is worth
noting that the disparity in dataset sizes, with
VOC2012 being smaller than COCO, may have
implications on the obtained results, indicating the
importance of dataset selection and size in object
detection studies.
REFERENCES
Aboah, A., Wang, B., Bagci, U., & Adu-Gyamfi, Y. 2023.
Real-time multi-class helmet violation detection using
few-shot data sampling technique and yolov8. In
Proceedings of the IEEE/CVF conference on computer
vision and pattern recognition. pp. 5349-5357.
Das, B., & Agrawal, P. 2024. Object Detection for Self-
Driving Car in Complex Traffic Scenarios. In MATEC
Web of Conferences. vol. 393, p: 04002.
Jönsson Hyberg, J., & Sjöberg, A. 2023. Investigation
regarding the Performance of YOLOv8 in Pedestrian
Detection.
Luo, X., Zhu, H., & Zhang, Z. 2024. IR-YOLO: Real-Time
Infrared Vehicle and Pedestrian Detection. Computers,
Materials & Continua, vol. 78(2).
Ma, S., Lu, H., Liu, J., Zhu, Y., & Sang, P. 2024. LAYN:
Lightweight Multi-Scale Attention YOLOv8 Network
for Small Object Detection. IEEE Access.
Motwani, N. P., & Soumya, S. 2023. Human Activities
Detection using DeepLearning Technique-YOLOv8. In
ITM Web of Conferences. vol. 56, p: 03003.
Pascal, V., 2012. VOC dataset.
https://docs.ultralytics.com/datasets/detect/voc/
Reis, D., Kupec, J., Hong, J., & Daoudi, A. 2023. Real-time
flying object detection with YOLOv8.
arXiv:2305.09972.
Soylu, E., & Soylu, T. 2023. A performance comparison of
YOLOv8 models for traffic sign detection in the
Robotaxi-full scale autonomous vehicle competition.
Multimedia Tools and Applications, pp: 1-31.
Xiao, X., & Feng, X. 2023. Multi-object pedestrian tracking
using improved YOLOv8 and OC-SORT. Sensors, vol.
23(20), p: 8439.
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
434
