
Miniature Autonomous Vehicle Environment for Sim-to-Real Transfer in
Reinforcement Learning
Stephan Pareigis
a
, Daniel Riege and Tim Tiedemann
Department of Computer Science, HAW Hamburg, Berliner Tor 7, 20099 Hamburg, Germany
Keywords:
Reinforcement Learning, Digital Twin, Autonomous Driving, Sim-to-Real Gap, Miniature Autonomy,
Real-World Reinforcement Learning.
Abstract:
An experimental setup and preliminary validation of a platform for sim-to-real transfer in reinforcement learn-
ing for autonomous driving is presented. The platform features a 1:87 scale miniature autonomous vehicle,
the tinycar, within a detailed miniature world that includes urban and rural settings.
Key components include a simulation for training machine learning models, a digital twin with a tracking
system using overhead cameras, an automatic repositioning mechanism of the miniature vehicle to reduce hu-
man intervention when training in the real-world, and an encoder based approach for reducing the state space
dimension for the machine learning algorithms.
The tinycar is equipped with a steering servo, DC motor, front-facing camera, and a custom PCB with an
ESP32 micro-controller. A custom UDP-based network protocol enables real-time communication.
The machine learning setup uses semantically segmented lanes of the streets as an input. These colored lanes
can be directly produced by the simulation. In the real-world a machine learning based segmentation method
is used to achieve the segmented lanes.
Two methods are used to train a controller (actor): Imitation learning as a supervised learning method in which
a Stanley controller serves as a teacher. Secondly, Twin Delayed Deep Deterministic Policy Gradient (TD3)
is used to minimize the Cross-Track Error (CTE) of the miniature vehicle with respect to its lateral position in
the street. Both methods are applied equally in simulation and in the real-world and are compared.
Preliminary results show high accuracy in lane following and intersection navigation in simulation and real-
world, supported by precise real-time feedback from the tracking system. While full integration of the RL
model is ongoing, the presented results show the platform’s potential to further investigate the sim-to-real as-
pects in autonomous driving.
1 INTRODUCTION
The article presents the current progress on a project
on miniature autonomy, where various aspects of ap-
plying artificial intelligence methods in real-world
scenarios are investigated using small autonomous
model vehicles (Tiedemann et al., 2019), (Pareigis
et al., 2021), (Tiedemann et al., 2022).
A miniature landscape on a scale of 1:87 with a
road was constructed and small vehicles have been
developed to drive fully or semi-autonomously on the
road.
There are many similar projects on autonomous
driving in a small scale for research and educational
purposes (e.g. (TU-Braunschweig, 2020), (Paull
et al., 2017)). In many of these projects, the corre-
a
https://orcid.org/0000-0002-7238-0976
sponding platforms and environments have standard-
ised and well-defined formats so that suitable experi-
ments on autonomous driving can be carried out under
controlled laboratory conditions.
In the project described here, a particularly com-
plex environment is deliberately chosen for image-
based autonomous driving. Figures 1 and 2 show an
excerpt from the model landscape.
Two overhead cameras are used to generate cur-
rent status images of the miniature world, which pro-
vide input for a digital twin. The miniature world is
completely modelled digitally in two dimensions to
allow experiments in simulations.
In a previous work by the authors also a 3D model
of the miniature world has been created in Unity (see
figure 3), and a steering controller has been trained in-
side the Unity simulation using reinforcement learn-
Pareigis, S., Riege, D. and Tiedemann, T.
Miniature Autonomous Vehicle Environment for Sim-to-Real Transfer in Reinforcement Learning.
DOI: 10.5220/0012944400003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 309-317
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
309

Figure 1: Excerpt from the model landscape for testing au-
tonomous vehicles. The realistic complexity of the model
with different road colours, road markings, trees, buildings,
etc. can be seen. The functionality of the Mapbuilder tool,
which is used to generate a precise simulation of the real
test environment, is also visualised.
Figure 2: The figure shows the model world with streets, a
hill in the centre, houses and a rural background image. At
the top two cameras can be seen, each connected to an RPi,
and lamps.
ing methods which are provided in the ML-agents
package of Unity.
The primary objectives of the experimental setup,
which includes the miniature environment, au-
tonomous and semi-autonomous vehicles, along with
their corresponding digital models and simulations,
are to facilitate sim-to-real transfer in reinforcement
learning. The setup aims to enhance the understand-
ing of artificial intelligence methods, while providing
a platform to test image processing techniques and
software architectures for autonomous driving in real-
world-like scenarios.
Recent investigations in the aforementioned
project relate to the so-called simulation-to-reality
gap, or sim-to-real gap.
Autonomous agents that are trained in the simu-
lation do not function without difficulty in real-world
environments. Problems are not only caused by the
Figure 3: The illustration shows a model of the miniature
world in Unity from a previous work. Vehicles are trained
in Unity using ML-Agents and an array of distance scans.
Training in simulation was successful. However, the results
could not be applied to the real-world due to unavailability
of distance information in the real miniature world.
different properties of sensor data in simulation and
reality. The different physics and system dynamics
in simulation and reality also generally cause difficul-
ties.
In past studies (Pareigis and Maaß, 2023) a con-
troller was successfully designed that compensates
for changes in system dynamics during ongoing op-
eration. The special architecture of the controller also
makes it immune to discrepancies in system dynamics
in simulation and reality. This controller was trained
using imitation learning (IL) using a given PID con-
troller as a template.
The reason for choosing a reinforcement learning
(RL) based approach in this work is, that a teacher
might not always be available. In addition, an IL-
trained agent will never be able to perform superior
to its teacher. Using RL, by specifying a target func-
tion to be optimized, given an adequate learning pro-
cess, an improved driving behavior can ultimately be
achieved.
The aim of the present investigations is to design
a controller that optimizes a given target function and
is robust against discrepancies in system dynamics in
simulation and the real-world.
The paper describes the experimental setup, in-
cluding
• the miniature model world
• the autonomous vehicle Tinycar and smart vehi-
cles
• a digital twin composed of overhead cameras and
tracking system
• the simulation system including map builder
• a machine learning architecture using simulation
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
310

and real-world data for supervised and reinforce-
ment learning training
The paper describes the experimental setup of the
miniature world including the vehicles and the com-
munication infrastructure in section 2. The machine
learning setup is described in section 3. Section 4
contains the experimental results with respect to real-
time aspects, training and performance in simulation
and real-world, supervised and reinforcement learn-
ing methods. Section 5 discusses the obtained results.
2 MINIATURE AUTONOMY
SETUP
The section describes the setup of the model world,
the tinycar, the digital twin, the simulation environ-
ment and the reinforcement learning architecture.
2.1 Miniature Model World
Figure 2 shows the model world in scale 1:87. The
model world features a variety of intersection types,
curves of different diameter, various street surface
colors, traffic lights, and various road edges. Milled
wooden parts are used as a base for the road, in which
magnets are inserted in a centre groove.
The embedded magnets enable automated minia-
ture vehicles without active steering (which we call
smart cars) to drive along the road. This allows traffic
to be generated within which the autonomous minia-
ture vehicles with active steering (Tinycars) have to
behave accordingly.
Switches are installed under the crossroads, which
switch the grooves with the magnets and thus allow
variable driving behaviour for the smart cars.
2.2 Tinycar and Smart Cars
The tinycar is a 1:87 scaled miniature vehicle de-
signed to emulate the functionalities of a full-sized
autonomous car. The primary components include
a steering servo, a DC motor, LEDs for headlights
and blinkers, and a front-facing camera. These com-
ponents are controlled by an ESP32 microcontroller,
chosen for its low power consumption and integrated
Wi-Fi capabilities.
Figures 4 and 5 show the Tinycar in the miniature
environment and as a CAD drawing.
Automatic Repositioning. The reset procedure in the
simulated environment repositions the car to a ran-
dom spawn point. In the real-world, an automatic
repositioning method is implemented to avoid manual
Figure 4: Tinycar shown in Minature Wonderland in Ham-
burg. The front facing camera is integrated into the wind-
shield. A single LED is used as a headlight. The Tinycar is
also equipped with blinkers on each side.
Figure 5: The CAD drawing of the Tinycar shows its di-
mensions. The servomotor for controlling the steering is in-
stalled vertically to act directly on the steering linkage and
to minimise play. The camera is installed at a slightly in-
clined angle.
intervention. This method continuously samples the
nearest edge from the ground truth trajectory based
on the car’s current position and orientation. The car
repositions itself by first driving backwards to clear
obstacles, then forwards to the nearest edge using the
Stanley control algorithm.
Smart Cars. Smart cars have been developed us-
ing the Faller Car System as a platform. These ve-
hicles use a magnet attached to the steering linkage
that keeps the vehicle on the magnetic track under-
neath the surface of the street. Other than the Faller
Car System, the Smart Cars have been enhanced with
a microprocessor that allows a WLAN-connection to
control the vehicle’s motor. Some Smart Cars are also
equipped with a camera.
2.3 Digital Twin and Tracking System
The digital twin serves as a virtual replica of the
miniature world, providing a controlled environment
for the initial training of the reinforcement learning
model.
Miniature Autonomous Vehicle Environment for Sim-to-Real Transfer in Reinforcement Learning
311
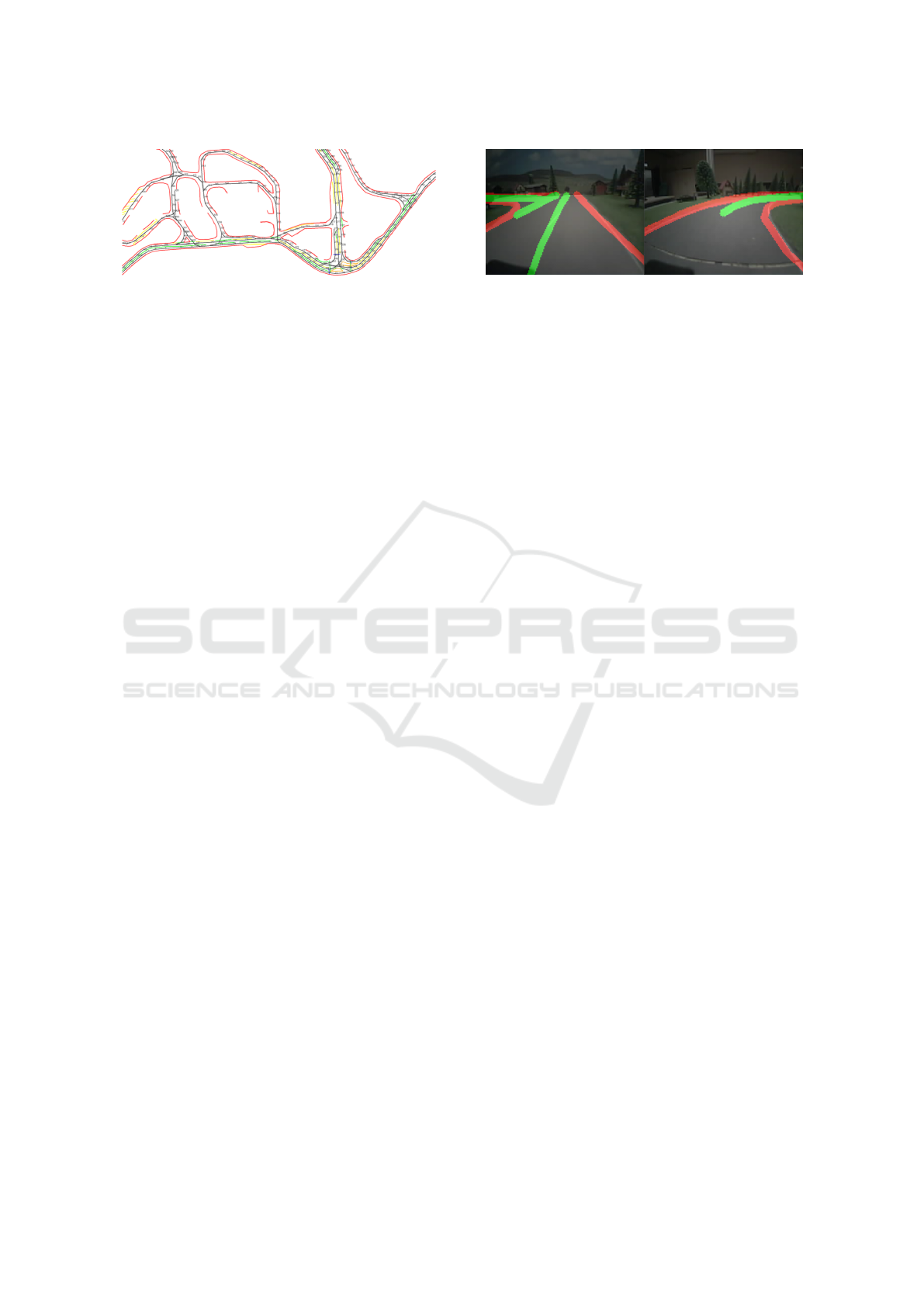
Figure 6: A map of part of Knuffingen in Miniatur Wunder-
land Hamburg is used for both simulation and real-world
environments. It is manually annotated with a custom map-
builder, creating a JSON file with lane line graphs and the
ground truth trajectory. Node IDs on the map indicate the
ground truth trajectory and define spawn points for training
the reinforcement learning algorithm.
Overhead Cameras. Two high-resolution cameras
are mounted above the track, offering a view of the
entire driving environment. The cameras are attached
to the top aluminium frame as can be seen in figure 2.
Tracking System. A tracking system is designed to
provide continuous and precise feedback on the tiny-
car’s position and orientation.
2.4 Simulation Environment
A simulation is used for initial training of the machine
learning models. It serves for both training reinforce-
ment learning and supervised learning algorithms.
The simulation consists of two main components:
The car’s kinematics and the camera/lane segmenta-
tion simulation. These components operate on de-
tailed maps, which are 1:1 replicas of the described
laboratory environments and part of the miniature
city (Knuffingen) in Miniatur Wunderland Hamburg
(Miniatur Wunderland Hamburg, 2024).
Map Creation. The maps are manually annotated us-
ing a custom mapbuilder, which overlays lane lines
and the ground truth lane path (center of the lane) onto
a reference image. The mapbuilder generates a JSON
file containing nodes and edges for each lane line and
the ground truth trajectory, which is treated as a di-
rectional graph. This file is used by the simulation
to render simulated camera images and calculate the
car’s position and orientation after each step.
Figure 1 shows part of the map created by map-
builder superimposed on an image of the overhead
camera of the real miniature world.
Kinematics. The preliminary simplified objective of
these investigations is to control only the steering an-
gle, with a fixed speed at 0.5 m/s, allowing the simu-
lation to focus on kinematics only.
The steering angle determines the curve radius,
enabling the use of a linear transformation matrix to
update the vehicle’s position and orientation.
Camera Rendering. In the simulation, the camera
Figure 7: Two example images from the simulation are
overlaid onto frames from the tinycar’s real camera. Simu-
lated images are generated for these positions and overlaid
with the real camera feed to verify simulation accuracy.
rendering process generates lane segmentation im-
ages rather than raw camera frames. This approach
simplifies the simulation and reduces computational
requirements. The resulting images as produced by
the simulation can be seen in figure 7.
Lane Segmentation. The lane segmentation model
outputs binary images for each class of lane lines.
These images are combined to form the observation
space for the reinforcement learning agent.
Projection. The lane line points are projected into
the camera frame using intrinsic and extrinsic camera
matrices. This projection ensures that the simulated
camera images closely match those captured by the
real tinycar.
3 REINFORCEMENT LEARNING
ARCHITECTURE
This section outlines the reinforcement learning (RL)
architecture used to train the tinycar for autonomous
navigation in both simulated and real-world environ-
ments. Key components include the RL algorithm,
observation and action spaces, reward signal, and
model architecture.
3.1 Twin Delayed Deep Deterministic
Policy Gradient (TD3)
The TD3 algorithm (Fujimoto et al., 2018) controls
the car’s steering angle. TD3, an off-policy actor-
critic method, extends DDPG by using two critic
networks to reduce overestimation bias and stabilize
training. The actor network is optimized to maximize
cumulative rewards, while the critics minimize the er-
ror between estimated and actual Q-values. Target
policy smoothing and delayed policy updates further
enhance training stability.
To promote exploration, temporally correlated
Ornstein-Uhlenbeck noise is added to the actions, pre-
venting premature convergence and encouraging di-
verse action selection (Lillicrap et al., 2016).
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
312

3.2 Observation and Action Spaces
3.2.1 Observation Space
The observation space is generated from preprocessed
camera frames segmented into lane lines and road
edges. A lane segmentation model outputs binary im-
ages for relevant road features, reducing the complex-
ity of raw data processing and minimizing the sim-to-
real gap. The observation space is defined as:
S = {0, 1}
C×W×H
(1)
where C is the number of classes of segmented lane
markings, W is the frame width, and H the height.
In addition to lane following, the agent receives a
one-hot encoded maneuver vector m
t
for specific ac-
tions such as turning. The policy is defined as:
π : S × M → A (2)
3.2.2 Action Space
The action space consists of the car’s steering an-
gle, with throttle held constant. The steering angle
is a continuous value between -1 and 1, scaled by the
maximum steering angle of the car:
a
t
∈ A = [−1, 1] (3)
3.2.3 Reward Signal
The reward is based on the cross-track error (CTE),
encouraging the agent to minimize the deviation from
the lane center:
R =
∑
γ · r
t
with r
t
= max(−33 × abs(CTE) + 1, −1)
(4)
The value −33 is derived by dividing the maximum
reward (1) by the maximum allowable cross-track er-
ror (CTE) of 0.03 meters, ensuring that any CTE be-
yond this threshold results in a negative reward.
An episode terminates if the car leaves the track,
collides with an obstacle, or reaches the maximum of
1000 steps. A track exit occurs when the CTE ex-
ceeds 0.1 meters, and a collision is defined as the car
remaining stationary for 10 steps despite having a set
velocity. In the real-world environment, the car is au-
tomatically repositioned within the lane, while in sim-
ulation, it respawns at a random predefined point.
3.3 Model Architecture
The model is trained in two stages: pretraining the
encoder using Imitation Learning (IL) and training the
Actor and Critic networks using TD3.
Pretraining the Encoder with Imitation Learning
(IL). The encoder is pretrained to extract features
Figure 8: The Imitation Learning (IL) network pretrains the
encoder, which is then used in TD3 training. The encoder
outputs feature vectors that serve as input to the Actor and
Critic networks, while the encoder remains frozen during
TD3 updates.
from the observation space using data from a human
driver or Stanley controller. This pretrained encoder
is used for the Actor and Critic networks, without fur-
ther updates during TD3 training, reducing computa-
tional load and speeding up learning.
Two IL models are tested:
• One trained entirely in simulation.
• Another finetuned with real-world data to reduce
the sim-to-real gap.
Training the Actor and Critic Networks with TD3.
The Actor and Critic networks serve distinct roles but
share a common feature extraction process. Both use
a stack of the last 10 feature vectors as input, provid-
ing temporal context to smooth steering actions and
prevent oscillations, similar to the derivative term in
PID controllers.
The actor learns the policy by mapping observa-
tions to actions, maximizing the Q-value predicted by
the critic. The critic estimates the Q-values of the
actor’s actions, with two critic networks in TD3 to re-
duce overestimation bias and stabilize training.
While both networks use the same pre-trained en-
coder, the actor optimizes action selection, while the
critic evaluates those actions.
4 EXPERIMENTAL RESULTS
Extensive quantitative tests and experiments have
been made with the described setup. This section
gives a summary on the main results and achieve-
ments.
Miniature Autonomous Vehicle Environment for Sim-to-Real Transfer in Reinforcement Learning
313

4.1 Real-Time Aspects
The training environment must meet real-time re-
quirements for reinforcement learning, as neural net-
work weights are updated during car interactions. The
tinycar’s firmware uses FreeRTOS for strict timing,
while the tracking and gym systems run on Linux and
macOS.
Tinycar Latency. Frame latency is measured using
a three-way handshake to account for clock synchro-
nization issues. Network latency is defined as the time
from frame capture to receipt in the training environ-
ment, adjusted for round-trip time (RTT). The total
latency for a TD3 learning step is around 101 ms at
320x160 resolution, including compression, decom-
pression, and inference.
Tracking System Latency. Latency is measured
from frame capture by the overhead camera to
its availability in the training environment, includ-
ing OpenCV processing and network transmission.
Trac.king data (12 bytes) latency is calculated using
RTT/2. Higher camera resolutions increase process-
ing time.
4.2 Machine Learning Architecture
The section describes test results with respect to the
machine learning architecture.
Encoder. The encoder compresses a 160 × 128 im-
age into a 256-dimensional vector for the actor. It
is trained via supervised learning using steering an-
gles collected from manual driving or the Stanley con-
troller. Three training setups were tested to minimize
the sim-to-real gap:
1. Two encoders: one trained on simulation data, the
other on real data.
2. One encoder trained on mixed simulation and real
data.
3. Two encoders sharing actor weights: one trained
on simulation data, and then used to train the sec-
ond encoder on real data.
The simulation dataset contains 80,000 images, and
the real dataset consists of 36,184 images, collected
at HAW Hamburg and Knuffingen.
Feature Vector Comparison. A sequence of 631
frames was collected using the Stanley controller,
with frames from the real camera (post-processed via
lane segmentation) captured in parallel with simu-
lated frames at the same positions. Feature vectors
were computed for each encoder, and the mean, max-
imum, and standard deviation of the differences be-
tween simulated and real-world vectors were calcu-
lated (see Table 1). Encoders sharing actor weights
Table 1: Feature vector differences between real and simu-
lated environments for different encoder setups. Lower val-
ues indicate higher similarity.
Setup Mean Max Std Dev
Independent 1.143 10.084 0.071
Mixed 0.679 7.486 0.093
Shared Actor 0.636 6.035 0.056
Figure 9: Real-world trajectory showing the right-turn ma-
neuver maintaining lane control, while left and straight ma-
neuvers struggle during right-hand turns.
produced the most similar feature vectors, with a
mean difference of 0.636, compared to independent
training.
Driving Performance. The encoder and actor were
benchmarked in the real-world using 5000 steps per
maneuver (straight, left, right). Table 2 shows that the
right-turn maneuver had the lowest average CTE, sim-
ilar to the Stanley controller. Real-world performance
was slightly better than in simulation, demonstrating
the encoder’s ability to predict steering angles accu-
rately based on real input.
Table 2: Driving performance for the shared actor setup
in real-world and simulation environments. CTE values in
millimeters.
Env Maneuver CTE Avg CTE Std Dev
Straight 13.572 19.033
Real Right 9.622 8.613
Left 14.289 18.601
Straight 13.512 14.314
Sim Right 11.690 6.879
Left 17.297 19.477
Trajectory Analysis. Figure 9 shows the driving
paths for right and left maneuvers in the real-world.
The right-turn maneuver handles both turns without
leaving the lane, while the left and straight maneuvers
struggle with right-hand turns, sometimes leaving the
lane. The simulation did not exhibit this behavior, but
wide turns at intersections led to higher CTE in both
environments.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
314

4.3 Reinforcement Learning Training
Results
As described in Section 3.1, the actor is trained using
the Twin Delayed Deep Deterministic Policy Gradient
(TD3) algorithm. The training begins in simulation
to establish baseline behavior, followed by real-world
fine-tuning to adapt to physical dynamics and address
the sim-to-real gap. Experiments have shown that us-
ing encoders with shared weights from the supervised
learning actor leads to optimal performance, and this
configuration is employed for training the TD3 actor.
The replay buffer has a capacity of 500,000, and
the critic is trained after every step using a batch size
of 256. The actor is updated every second step with
the same batch size. Learning rates are set to 2e − 4
for the critic and 1e − 4 for the actor, with a target
update rate τ = 0.001 and a discount factor γ = 0.99.
Each episode has a maximum of 1,000 steps, with ran-
domized maneuvers and spawn points.
A linear reward shaping strategy is applied, where
rewards range from 1 to -1 based on the cross-track
error (CTE). A CTE of 60 mm results in the mini-
mum reward, and the episode terminates if the CTE
exceeds 70 mm for 5 consecutive steps. In the real-
world environment, an additional termination occurs
if the car’s velocity drops below 0.01 m/s for 5 steps,
preventing the vehicle from becoming stuck.
Initial testing of the actor occurs in simulation to
verify autonomous driving capability and fine-tune
hyperparameters. Subsequently, real-world testing is
conducted on the track at HAW Hamburg. Due to
the absence of tracking data in the Knuffingen envi-
ronment, this setup is only used in simulation. After
initial testing with simulation-trained weights, the ac-
tor continues real-world training, and both versions
are compared. Additionally, the encoder is retrained
using the TD3 actor’s weights to assess potential per-
formance gains by leveraging simulation-specific fea-
tures.
RL in Simulation. The actor undergoes 1,000 train-
ing episodes in the simulation, with a maximum of
1,000 steps per episode in the HAW environment
and 2,000 steps in the larger Knuffingen environ-
ment. The reward curves show improvement over
time, though not reaching maximum rewards, indicat-
ing some residual CTE.
The right-turn maneuver consistently exhibits the
lowest CTE and heading error (H-Error). In the
Knuffingen environment, the actor demonstrates os-
cillations and misalignment at intersections, resulting
in early termination when the CTE exceeds 70 mm.
RL in Real-World. Due to the absence of a track-
ing system in the Knuffingen environment, real-world
testing is limited to the HAW Hamburg environment.
The TD3 actor trained in simulation is first tested in
the real world without modification, except for replac-
ing the encoder with one trained on real-world data.
After initial tests, the actor is trained for an addi-
tional 300 episodes in the real world, using the same
hyperparameters as in simulation. The simulation
training experience buffer is retained to avoid catas-
trophic forgetting. Results indicate that real-world
performance is generally worse than in simulation,
with higher CTE and H-Error across all maneuvers.
Training in the real world improved left-turn perfor-
mance but degraded right-turn performance, with no
significant change in straight maneuvers.
Subsequent tests revealed that using raw camera
data instead of lane segmentation did not enhance per-
formance, underscoring the importance of accurate
real-world observation space for the TD3 actor.
4.4 Discussion on Real-World RL
This section analyzes the experimental results and
overall project. The primary objective was to train
a reinforcement learning (RL) model in a simulated
environment and successfully transfer it to the real
world. The model was expected to autonomously
navigate the car, execute maneuvers at intersections,
and adapt to real-world conditions.
4.4.1 Environment
The training environment integrated both a car sim-
ulation and a digital twin for real-world operations.
Real-time performance and the tracking system were
critical to the RL task. While the simulated cam-
era closely replicated the real camera, differences in
lane segmentation were observed, likely due to lim-
ited training data. The tracking system’s latency and
accuracy were generally sufficient, but enhancements
are needed to reduce false positives.
4.4.2 Encoder
The encoder reduced the high-dimensional image in-
put into a 256-dimensional feature vector. Several
training setups were evaluated to reduce the sim-to-
real gap, with the shared actor weights technique pro-
ducing the most similar feature vectors. However, di-
rect minimization of feature vector differences could
offer further improvements. Although the encoder
trained with real-world data enabled the simulation-
trained actor to drive the car, difficulties were noted
in left and straight maneuvers.
Miniature Autonomous Vehicle Environment for Sim-to-Real Transfer in Reinforcement Learning
315

4.4.3 Actor
The TD3 actor, initially trained in simulation and then
in the real world, performed better in the simpler
HAW environment compared to Knuffingen. Real-
world training, supported by the simulation expe-
rience buffer, prevented catastrophic forgetting but
still underperformed relative to simulation. While
the supervised-trained actor achieved reasonable real-
world results, the TD3 actor struggled, likely due to
the sim-to-real gap or limitations in lane segmentation
input. Testing with raw camera data did not yield per-
formance improvements, indicating a need for more
robust models or alternative learning algorithms for
real-world applications.
5 CONCLUSION
This paper presented the development of a compre-
hensive system for testing and training machine learn-
ing (ML) and reinforcement learning (RL) models for
autonomous driving within a miniature environment.
The system features a digital twin of a 1:87 scaled city
model at HAW Hamburg, enabling simulated tests
and real-world training for RL methods.
The system employs overhead cameras for track-
ing the position and orientation of a 1:87 scale au-
tonomous vehicle, the tinycar, in real time. The tiny-
car, equipped with a front-facing camera for envi-
ronmental perception, demonstrates effective control
via a low-latency wireless camera stream, supporting
real-world RL experiments.
Initial results show that the system is capable of
training neural networks to autonomously navigate
and handle intersections. The high-precision track-
ing system, combined with automatic repositioning,
achieves an 84% episode reset success rate without
human intervention. The encoder successfully re-
duces the input data dimensionality, minimizing the
sim-to-real gap and shortening the training time re-
quired in real-world environments. Models trained
with supervised learning demonstrate effective per-
formance, particularly in handling intersections.
However, RL models trained in simulation exhibit
challenges when transferred to more complex real-
world environments. While intersection handling in
simulation is reliable, real-world performance, partic-
ularly in the Knuffingen environment, reveals issues
such as oscillations and difficulties in lane selection
at intersections. The real-world transfer of models
shows limited generalization and marginal improve-
ment after additional training, indicating the need for
further refinement.
Overall, this work provides a functional frame-
work for investigating RL in real-world settings and
addressing the sim-to-real gap. Future research will
focus on improving the tracking system, extending the
gym environment to encompass more complex sce-
narios, and exploring advanced perception methods,
such as autoencoders, to further reduce the sim-to-
real gap and enhance the real-world applicability of
simulation-trained models.
REFERENCES
Fujimoto, S., Hoof, H., and Meger, D. (2018). Addressing
function approximation error in actor-critic methods.
In Proceedings of the 35th International Conference
on Machine Learning, pages 1587–1596. PMLR.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2016). Contin-
uous control with deep reinforcement learning. In In-
ternational Conference on Learning Representations
(ICLR).
Miniatur Wunderland Hamburg (2024).
Knuffingen: Miniatur wunderland.
https://www.miniatur-wunderland.de/wunderland-
entdecken/welten/knuffingen/. Accessed: 2024-09-
29.
Pareigis, S. and Maaß, F. L. (2023). Improved robust neural
network for sim2real gap in system dynamics for end-
to-end autonomous driving. In Gini, G., Nijmeijer,
H., Burgard, W., and Filev, D., editors, Informatics
in Control, Automation and Robotics, volume 836 of
Lecture Notes in Networks and Systems, pages 1–21.
Springer, Cham.
Pareigis, S., Tiedemann, T., Kasten, M., Stehr, M., Schnir-
pel, T., Schwalb, L., and Burau, H. (2021). K
¨
unstliche
Intelligenz in der Miniaturautonomie. In Fachtagung
des gemeinsamen Fachausschusses Echtzeitsysteme
von Gesellschaft f
¨
ur Informatik e.V. (GI), VDI/VDE-
Gesellschaft f
¨
ur Mess- und Automatisierungstechnik
(GMA) und Informationstechnischer Gesellschaft im
VDE (ITG) 2020, Informatik aktuell, pages 41–50.
Paull, L., Tani, J., Knepper, R., Rus, D., and Leonard, J.
(2017). Duckietown: an open, inexpensive and flex-
ible platform for autonomy education and research.
Proceedings of the 2017 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
1497–1504.
Tiedemann, T., Fuhrmann, J., Paulsen, S., Schnirpel, T.,
Sch
¨
onherr, N., Buth, B., and Pareigis, S. (2019).
Miniature autonomy as one important testing means in
the development of machine learning methods for au-
tonomous driving : How ml-based autonomous driv-
ing could be realized on a 1:87 scale. In Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics 2019, ICINCO 2019 : proceedings
of the 16th International Conference on Informatics in
Control, Automation and Robotics, pages 483–488.
Tiedemann, T., Schwalb, L., Kasten, M., Grotkasten, R.,
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
316

and Pareigis, S. (2022). Miniature autonomy as means
to find new approaches in reliable autonomous driv-
ing ai method design. Frontiers in neurorobotics,
16:846355.
TU-Braunschweig (2020). Carolo-cup: An autonomous
driving competition. In Proceedings of the 2020 Au-
tonomous Driving Competitions.
Miniature Autonomous Vehicle Environment for Sim-to-Real Transfer in Reinforcement Learning
317
