
Reinforcement Learning for Autonomous Headland Turns
Lukas Pindl
1
, Riikka Soitinaho
1
, Patrick Behr
1
and Timo Oksanen
1,2
1
Chair of Agrimechatronics, Technical University of Munich (TUM), Germany
2
Munich Institute for Robotics and Machine Intelligence (MIRMI), Technical University of Munich (TUM), Germany
Keywords:
Reinforcement Learning, Autonomous Vehicles, Agricultural Robotics, Headland Turning, Proximal Policy
Optimization.
Abstract:
This paper explores the use of reinforcement learning (RL) for the autonomous planning and execution of
headland turns, aiming to achieve real-time control without the need for preplanning. We introduce a method
based on proximal policy optimization (PPO), and incorporate expert knowledge through Dubins paths to
enhance the training process. Our approach models the vehicle kinematics and simulates the environment
in Matlab/Simulink. Results indicate that reinforcement learning (RL) can effectively handle the complexity
of headland turns, offering a promising solution for enhancing the efficiency and productivity of agricultural
operations. We show, that this approach can reach the turns goal point reliably in simulation with a positional
error of under 20 cm. We also test the policy on a real vehicle, showing that the approach can run in real
conditions, although with reduced accuracy. This study serves as a foundation for future research in more
complex scenarios and optimization goals.
1 INTRODUCTION
One main puzzle piece in the automatic coverage of
agricultural fields is the planning and execution of
headland turns. Headland turning involves the nav-
igation of machinery at the ends of crop rows dur-
ing fieldwork activities such as plowing, planting, or
harvesting. The most common maneuvers are shown
in Figure 2. The headland, also known as the end
rows or turn rows, is a typically small area at the
edges of a field where machinery turns to begin a new
pass. This practice, while seemingly straightforward,
plays a significant role in the efficiency and productiv-
ity of farming. Efficient headland turning minimizes
time loss, reduces soil compaction, and mitigates crop
damage, contributing to overall operational effective-
ness. Various factors, including equipment type, field
geometry, and operator skill, influence the complex-
ity and execution of headland turns. Deep reinforce-
ment learning (DRL) is a potential option for this ap-
plication, that could allow for real time planning and
control of the vehicle. It could also enable inclusion
of multiple, sometimes competing, optimization ob-
jectives and should eventually be able to deal with
more complex vehicle models, due to it’s inherent
non-linearities. The goal for this paper is, to explore
the general viability of reinforcement learning (RL)
Figure 1: The AMX G-Trac is the chair’s own tractor. The
final agent was able to do a headland turn with this vehicle.
for this task. We design the simulation to represent
our research tractor (see Figure 1), so that we can test
the final agent on it.
To our knowledge, it is the first example of an
RL based controller that can fully plan and execute
a headland turn without the need for any preplanning
in the field. While the scope is still limited and some
simplifying assumptions are made, it is intended to
build a basis for future research with more complex
318
Pindl, L., Soitinaho, R., Behr, P. and Oksanen, T.
Reinforcement Learning for Autonomous Headland Turns.
DOI: 10.5220/0012944700003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 318-325
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
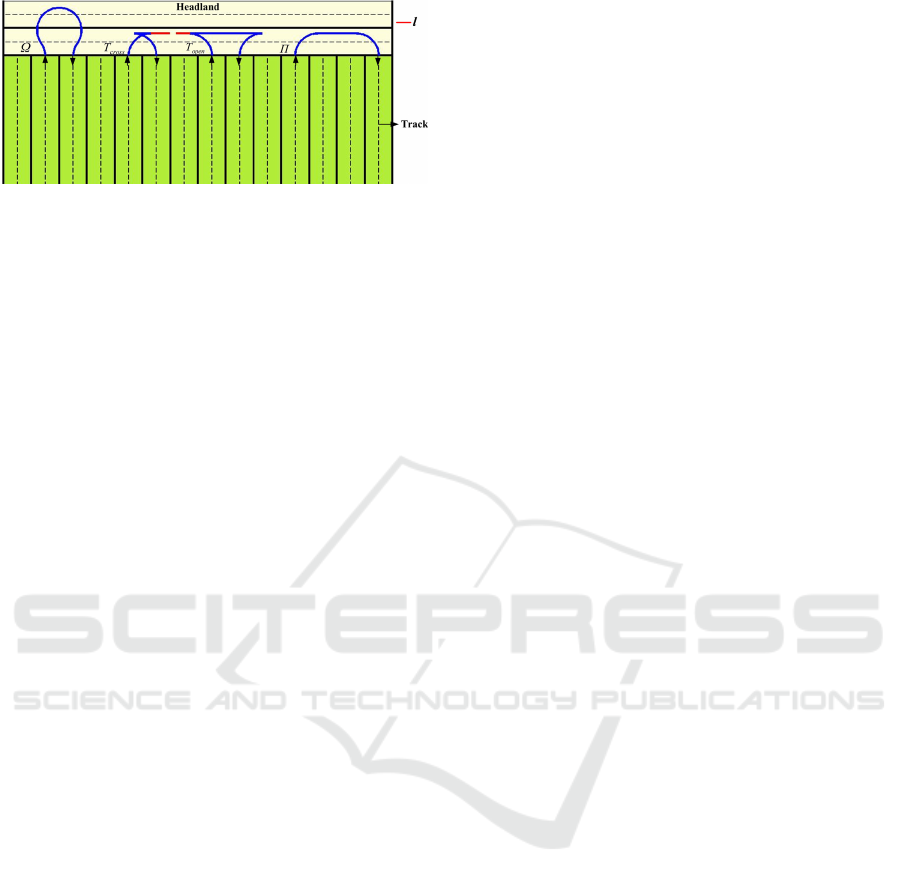
Figure 2: Illustration of the geometrical representation of a
field with four common turn types: The forward turn (Ω-
Turn), the reverse cross turn (T
cross
or Fishtail-Turn), the
reverse open turn (T
open
) and the double round corner turn
(Π or U-Turn). (Zhou et al., 2015, Figure 5).
models and optimization goals.
2 BACKGROUND
2.1 Related Work
Headland turns can be planned with many different
approaches. The problem can be represented through
optimal control as in (Oksanen, 2007). Here, a numer-
ical solver is used to find the necessary control inputs
and the resulting trajectory. This approach is revis-
ited by (Tu, 2013), where the solution is sped up with
some simplifications, as well as newer software and
hardware. (Sabelhaus et al., 2013) investigates the
use of continuous curvature paths for headland turns.
These use a similar approach as the well known Du-
bins turns (Dubins, 1957), but improve the real world
performance by accounting for limited steering rates.
(Cariou et al., 2009) and (Yin et al., 2020) plan a turn
using geometric approaches and use relatively simple
control laws to follow those trajectories. (Gao et al.,
2023) starts from scratch by also detecting the avail-
able headland area, mainly from camera images.
Much of the research regarding RL for non-
holonomic autonomous vehicles covers on-road driv-
ing. Off-road problems often have a very different
structure, making it necessary to find separate solu-
tions. The agent designed by (Wiberg et al., 2022)
uses information about the goal position, several ve-
hicle states like joint angles and wheel slip as well
as a local height map to navigate a forestry vehicle
through rough terrain. (S
´
anchez et al., 2023) proposes
to learn steering actions end-to-end from lidar based
range measurements in uneven terrain with obstacles.
Curriculum learning is applied during training with a
generic actor-critic algorithm.
While parking often happens on paved areas, the
problem structure is still similar, with one goal pose
and a comparable vehicle model. (Lazzaroni et al.,
2024) simulates parking a car in the CARLA simu-
lator. The agent is trained in simulation to learn the
right throttle and steering controls from distance mea-
surements and goal information. Curriculum learning
is also applied. (Wu et al., 2023) let human volun-
teers park in the CARLA simulator to generate expert
knowledge, that is used to speed up training.
RL has not yet been extensively tested for either
planning or control of vehicles in an agricultural con-
text, but some examples exist. (Makino et al., 1999)
employ tabular RL to improve a globally generated
path for covering a field. The vehicle model includes
an approximation of slip, that also depends on the ter-
rain.
(Olcay et al., 2023) train an agent to cover a field
and successfully turn at the end of each lane. They
achieved this by predefining a rough corridor, that the
vehicle should follow and then giving the DRL agent
its distance to the edge of this corridor in multiple di-
rections. A simple tractor-trailer kinematic model is
used for this purpose. Multiple learning algorithms
are applied and their results compared.
2.2 Headland Representation
Since the headland follows the edge of a field, it can
have various shapes. In this paper, to simplify the
generation of different situations, we assume the field
edge to be a straight line. While this is obviously not
true when looking at the entirety of a field, this ap-
proximation is valid for most areas, as long as it is
only applied locally to a single turn. Such simplifica-
tions are typical for headland turning automation (see
for example (Oksanen, 2007), (Tu, 2013), and (Yin
et al., 2020)). We only investigate left hand turns. For
the setup we use, to achieve a right hand turn, all in-
puts and outputs can simply be mirrored.
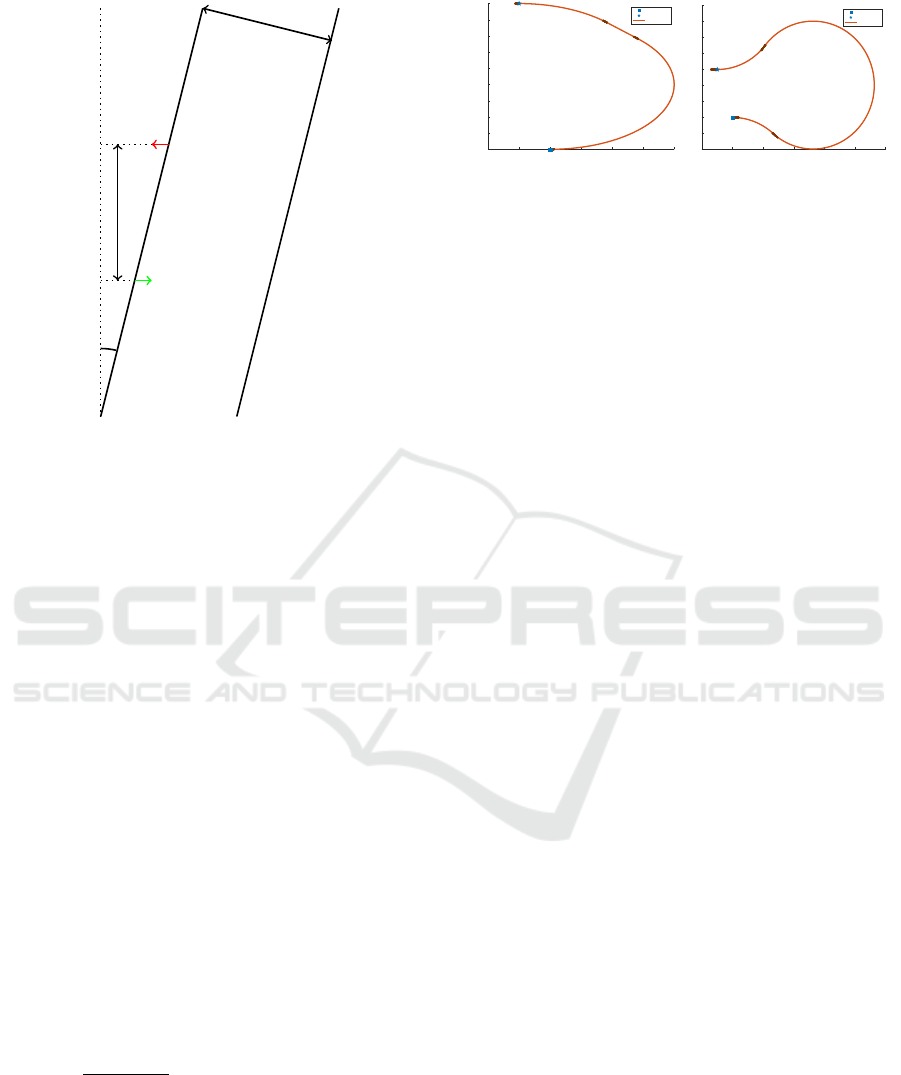
Figure 3 shows the geometrical representation that
we use in this paper. From any start pose p
start
the field-headland edge x
h, field
(y) is easily defined
through the headland angle α. The goal pose p
goal
can be calculated given the working width l
w
. Lastly,
the headland-outside x
h,out
(y) edge can be found by
shifting the field-headland edge by a fixed headland
width l
h
. Mathematically, these definitions can be for-
mulated as follows, if the start pose is assumed to be
p
start
= [0 0 0]
T
:
p
goal
= [l
w
sin(α) l
w
π]
T
(1a)
x
h, field
(y) = ysin(α) (1b)
x
h,out
(y) = l
h
cos(α) + y sin(α) (1c)
Reinforcement Learning for Autonomous Headland Turns
319
Field
Headland
x
h, f ield
Outside
Headland
x
h,out
α
l
h
x
p
start
x
p
goal
l
w
Figure 3: The general setup of the headland turn problem
for this paper. Arrows at start and goal point indicate the
vehicle orientation.
2.3 Proximal Policy Optimization
Proximal policy optimization (PPO) is an on-policy
actor-critic DRL method that was specifically de-
signed to allow the agent to be trained on samples
that were created with policies that were slightly dif-
ferent from the current one. PPO excels due to rel-
atively small computation times during the optimiza-
tion step, meaning that far more state-action pairs can
be included in training in the same amount of time.
PPO was introduced by (Schulman et al., 2017)
as a more computationally efficient version of trust
region policy optimization (TRPO) (Schulman et al.,
2015). PPO clips the change of the policy to a maxi-
mum ratio ε. To achieve this, the probability of choos-
ing the action that was taken is stored for each sample
as π
θ
old
(a
t
|s
t
) and the loss for the actor network is
then computed as
L (θ) = E
t
[min(r
t
(θ)A
t
,clip(k
t
(θ),1 − ε, 1 + ε)A
t
)]
(2a)
k
t
(θ) =
π
θ
(a
t
|s
t
)
π
θ
old
(a
t
|s
t
)
(2b)
with A
t
being the samples advantage. Note that the
ratio between the new and old policy k
t
(θ) is called
r
t
(θ) in the original paper. Since we use r for the re-
ward in this paper, we have changed the nomenclature
to avoid any confusion.
-2 -1 0 1 2 3 4
0
1
2
3
4
5
6
7
8
9
Start Position
Goal Position
Path
(a) U-Turn.
-2 0 2 4 6 8 10
-2
-1
0
1
2
3
4
5
6
7
Start Position
Goal Position
Path
(b) Ω-Turn.
Figure 4: Examples for a U-Turn and an Ω-Turn using Du-
bins connections.
2.4 Dubins Turns
A technique to find optimal trajectories between two
points for any vehicle with a fixed minimum turn ra-
dius is introduced by (Dubins, 1957). Some simpli-
fying assumptions are made, however. There is an
infinite amount of free space in all directions, with no
obstacles. Another assumption that is not typically
true in real-life applications, is that the vehicle can
steer at any angle instantly. While the steering angle
is limited, leading to a minimum turn radius, the vehi-
cle needs to switch from a full left turn to a full right
turn in an instant to perfectly execute a Dubins turn.
Even with such limitations, these can however gener-
ate fairly good U-turns and Ω-turns as shown in Fig-
ure 4, that can be a starting off point for further learn-
ing. Dubins paths can always be split into 3 parts. The
first is a curve, either left or right. Curves are always
at the minimum turn radius. The second part can ei-
ther be a straight segment, or a curve in the opposite
direction. The third segment is always a curve in the
same direction as the first. This yields 6 different path
types. For each, the path can be geometrically con-
structed from the given circles and straight lines. The
shortest of the 6 paths is chosen. Because they are
relatively simple to generate, we use Dubins turns as
expert knowledge (see Section 4.2).
3 REINFORCEMENT LEARNING
ENVIRONMENT
3.1 Vehicle Model
The goal in this study is, to model the chairs agricul-
tural research tractor. It is a Lindner Lintrac 130, also
called the G-Trac, that can steer the rear wheels inde-
pendently. We therefore include the four wheel steer-
ing capability in the model for later use. However,
we fix the rear wheel angle at δ
r
= 0 for all experi-
ments in this paper. The vehicle is modeled through
its kinematics only. The vehicle state is described by
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
320

X = [x y ϕ δ
f
δ
r
v]
T
(3)
x and y are the vehicle’s coordinates, ϕ its heading,
δ
f
,δ
r
describe the front and rear wheel angles and v
is the current velocity. The vehicle’s origin is set in
the center of the rear axle.
The kinematics are described by a simple differ-
ential equation, where l is the vehicle’s wheelbase:
dX =
vcos(ϕ)
vsin(ϕ)
(vsin(δ
f
− δ
r
)/(l cos(δ
f
)))
ω
f
ω
r
a
(4)
The control inputs for acceleration a and steering
rates ω
f
,ω
r
are limited by the given vehicle. For this
project, they are simply calculated from the desired
velocity and steering inputs, which were set by the
controller. To properly represent our G-Trac platform,
we used its wheelbase l = 2.42 m and maximum steer-
ing angle δ
f ,max
= 52
◦
in our simulation.
The first three components of the vehicle state de-
scribe its pose p
v
= [x y ϕ]. This pose is based on the
position of the middle of the vehicle’s rear axle. It is
sometimes explicitly referred to as the rear pose. If
the position of the front axle is needed, it can be cal-
culated as
p
v, f
= p
v
+ [l cos(ϕ) l sin(ϕ) 0]
T
(5)
= [x
f
y
f
ϕ]
T
(6)
3.2 Observation + Action Space
The observation space contains all information that is
given to the agent. It can therefore have great im-
pact on it’s performance. Giving more values is usu-
ally better. However, information that doesn’t help the
agent make decisions, can simply slow down training.
It is unfortunately not always immediately obvious,
which values are useful and which are not.
Care should also be taken, that all observations
are realistically obtainable on the real-world vehicle.
Otherwise, the agent can not be transferred to the
field.
The basic observation O for all experiments in this
paper is
O = [x
′
goal
y
′
goal
sin(ϕ
′
goal
) cos(ϕ
′
goal
) v d
h
α]
T
(7a)
p
′
goal
= [x
′
goal
y
′
goal
ϕ
′
goal
], (7b)
d
h
= x
h, f ield
(y) − x
f
(7c)
p
′
goal
is the goal pose, but transformed into the ve-
hicle system. Sine and cosine are used here, to avoid
jumps in the angle at ±π. The horizontal distance to
the field edge is given in d
h
. All values are also scaled
in the implementation, to keep values relatively small.
This helps with keeping gradients reasonable and sta-
bilizes learning.
To keep the setup simple, only the front steering
angle is controlled, meaning that the action space con-
sisted of only one variable, δ
f
.
3.3 Reward Function
The reward function is comprised of multiple compo-
nents. The full reward can be described as
r
f ull
= c
suc
r
suc
− c
f ail
r
f ail
− c
δ
r
δ
− c
time
(8a)
r
δ
= max(|a
steer, f
| − 1.1δ
f ,max
,0) (8b)
r
suc
and r
f ail
are 1, when the vehicle is in a success
or failure condition, 0 otherwise (see Equation (9) and
10). a
steer, f
is the desired front wheel angle. Equa-
tion (8b) will lead to the steering reward r
δ
being big,
if the desired angle is significantly over the maximum
steering angle of the vehicle. This stops the agent
from getting stuck in a learned behavior, where ev-
ery action constantly exceeds the maximum allowed
value. The controller then caps the action to δ
f ,max
,
meaning that small, random changes still lead to the
same result. Exploration is then hindered, as all tested
actions are the same. This part of the reward is only
necessary, if the used algorithm does not limit the ac-
tion output, which is the case for the Matlab imple-
mentation of PPO.
A success was counted, when the vehicle pose was
close to the goal pose in both position and heading.
q
x
′2
goal
+ y
′2
goal
< ε
norm
(9a)
|ϕ
′
goal
| < ε
ϕ
(9b)
The accuracy thresholds for the final evaluation of
the policy are ε
norm
= 0.2;ε
ϕ
=
π
36
, but different val-
ues are used during most of the training (see Sec-
tion 4.3). The failure condition is reached, if the front
axle passes the headland-outside edge, or if the rear
axle passes from the headland into the field by more
than 1 m:
d
h
< 0 (10a)
x < x
h, f ield
(y) − 1 (10b)
Typical values for the scaling factors in training
are c
suc
= 1, c
f ail
= 1, c
δ
= 0.002, c
time
= 0.001.
Reinforcement Learning for Autonomous Headland Turns
321

4 IMPLEMENTATION
4.1 Matlab/Simulink Setup
The vehicle model described in Section 3.1 is imple-
mented in Simulink. The differential equation Equa-
tion (4) is solved in discrete time steps of ∆t = 100ms
through a simple integrator. The control block re-
ceives the current state from this simulation and sends
the next steering angle as a control input. Inside the
control block, the vehicle state is used in conjunction
with the current scenario parameters to compute the
agent’s observations. The Simulink RL Agent block
is used to easily learn and execute the policy. A vi-
sualization is also provided, which can be turned off
during training.
The training setup is done in Matlab scripts. This
includes the reset function for the environment. At
the start of each episode, the agent starts at the origin
and the headland angle is chosen at random between
±30
◦
.
4.2 Inclusion of Expert Knowledge
Using purely random actions, the agent is extremely
unlikely to reach the goal without exiting the head-
land area. With so little positive reward, the agent
will probably not learn a successful policy. To avoid
this problem, agents can be pretrained from expert
knowledge, that is at least good enough to get close
to the goal, some of the time. For this purpose, Du-
bins turns, as introduced in Section 2.4, are used in
this paper. At the start of each episode, the inbuilt
Matlab function for generating Dubins turns is em-
ployed. This function outputs the distances, for which
the vehicle has to drive at a full left/right turn. This
information is used to directly control the vehicle in
simulation, by continuously integrating the distance
traveled, and changing the steering angle accordingly.
Since only tight, left-hand turns were tested for
this paper, all turns are of the type right-left-right.
Since the vehicle model uses limited steering rates,
strictly following these turns leads to a significant
mismatch. By simply adjusting the distance for each
of the 3 stages of the turn by a constant length, a much
better result can be achieved. For the specific setup in
this paper, the three stages are changed by -0.5m, -
0.8m and +0.1m respectively. While this is by far not
sufficient for reaching the goal very accurately and
consistently (see Table 2), it is good enough to give
some positive examples to the agent, allowing it to
learn from there.
The decision whether the agent will follow its cur-
rent RL policy or this expert knowledge, is made ran-
Table 1: Hyperparameters used for the most successful
training with PPO. Bold Parameters were varied in the ran-
dom search.
Parameter Value
Learning Rate Actor (Part 1) 5.448 × 10
−5
Learning Rate Actor (Part 2) 9.712 × 10
−6
Learning Rate Critic (Part 1) 3.202 × 10
−5
Learning Rate Critic (Part 2) 1.030 × 10
−5
Action Log Prob (Part 2) −2.677
Experience Horizon 4096
Minibatch Size 256
Clip Factor 0.1
Discount Factor 0.995
EntropyLossWeight 0.001
domly at the beginning of each episode. The chance
of using expert knowledge starts at almost 100%, and
is lowered linearly with the number of episodes all the
way to 0% shortly before the end of training.
4.3 Training and Hyperparameters
The Matlab RL-Pipeline makes it hard to dynamically
change certain hyperparameters during training. To
allow for fast learning in the beginning, but accurate
adjustments in the end, the training is split into two
parts, where the learning rates are lowered for the sec-
ond one. In the secondary training, the log probabil-
ity of the action’s normal distribution is also set to a
fixed value. The first training is for 17000 episodes,
the second for 5000. The second training is started
from the saved model that achieved the best success
rate at 20 cm accuracy during the first training. Af-
ter manual tuning to find a good baseline, a random
search over the most impactful hyperparameters is
performed. The agent with the best performance was
trained using the values listed in Table 1. Parameters
that are not mentioned use the default values in the
Matlab PPO implementation.
Even with the initial use of pregenerated Dubins
turns the agent would fail most attempts at the start
of the training. A lack of positive reinforcement can
make it harder for the algorithm to learn the desired
behavior. To increase the likelihood of success, the
values for ε
norm
,ε
ϕ
as introduced in Section 3.3 are
initially set to fairly high values (typically 1.5 m and
π
3
). As the training progresses the difficulty is in-
creased by lowering these thresholds. In the best
case, this would be done dynamically, whenever the
agent reaches sufficient success rates on the current
difficulty. Due to limitations with the learning setup
in Matlab, this was not easily possible. Instead, the
thresholds where lowered linearly over the course of
the training and reached their minimum shortly before
the episode limit of the training was reached. Chang-
ing the difficulty throughout the process brings some
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
322

problems with it. The learning rate must be very well
tailored to the rate at which the thresholds are ad-
justed. Otherwise the agent either overfits to the cur-
rent difficulty, or the agent can not keep up with the
increase in difficulty. In the end, a good balance was
found that allowed the agent to slowly adjust to the
new thresholds.
4.4 Real World Vehicle Integration
For testing the final policy in the real world, we use
the G-Trac that the chair has modified with multiple
sensors and controllers. The position of the vehicle is
gained from an RTK-GNSS receiver. From the posi-
tion of the antenna as well as current pitch and roll an-
gles from an IMU sensor, the position of the rear axle
near the ground can be calculated. An interface on the
G-Trac allows controlling the speed and steering an-
gles. The data is sent via CAN-Bus to the G-Trac at
a rate of 10 Hz, which then executes the commanded
actions. The G-Trac is shown in Figure 1. The pol-
icy was tested on a sloped grass field as well as a flat,
paved yard.
5 RESULTS
5.1 Training Progression
The results shown in this section are for the most suc-
cessful agent found during the hyperparameter search,
as discussed in Section 4.3. The agent learned to com-
plete a 3 m turn (l
w
= 3). Figure 5a indicates, how the
cumulative reward per episode developed. The dark
blue line shows the average reward over the previ-
ous 100 episodes. The yellow line tracks the critics
prediction in the first step of the episode, which in-
cludes the discount factor γ. The early decline of the
reward is expected, since the difficulty is increasing.
The ratio of precomputed Dubins turns to RL based
episodes is decreasing at the same time. At around
5000 episodes the steep improvement indicates that
the agent has managed to learn how to complete turns
for most of the tested headland angles at this point.
The frequent drops are most likely due to overfit-
ting to the current difficulty, meaning that the learning
rate may have been just slightly too high. The agent
was mostly able to recover however. The final accu-
racy required to be considered successful was set at
10 cm. Since actions are drawn semi-randomly dur-
ing training, this threshold could rarely be reached,
leading to the final episodes getting fairly low re-
wards. During training the agent is saved regularly,
when performance is especially good. This consists
0 2000 4000 6000 8000 10000 12000 14000 16000 18000
Episodes
-1.5
-1
-0.5
0
0.5
1
Reward
Episode Reward
Moving Average
First Step Critic
(a) Reward.
0 2000 4000 6000 8000 10000 12000 14000 16000 18000
Episodes
0
0.5
1
1.5
2
2.5
3
3.5
Root Mean Squared Error
(b) RMSE.
Figure 5: Indicators for training progression with the basic
setup.
of checking if a new global or local maximum was
reached in the average reward. To avoid saving too
many models, which would have significant storage
and time costs, some hysteresis is added. Then the
performance of each saved model is tested: The agent
is set to always choose the mean of the action dis-
tribution. With this deterministic agent 100 random
episodes are completed. For each episode the error
is computed as the smallest distance that the vehicle
ever had to the target. In our test we let the agent drive
past the goal to find this minimal distance, meaning
that the last recorded position was further away from
the goal than the best one. In a real application, it
would more likely be stopped as soon as the distance
starts increasing again. The way we measure the root
mean squared error (RMSE) reflects the second ap-
proach. Figure 5b shows how the resulting RMSE
progressed over training. While it clearly had a ma-
jor improvement around 4000 episodes, the value still
varies strongly afterwards, indicating that the training
was not especially stable.
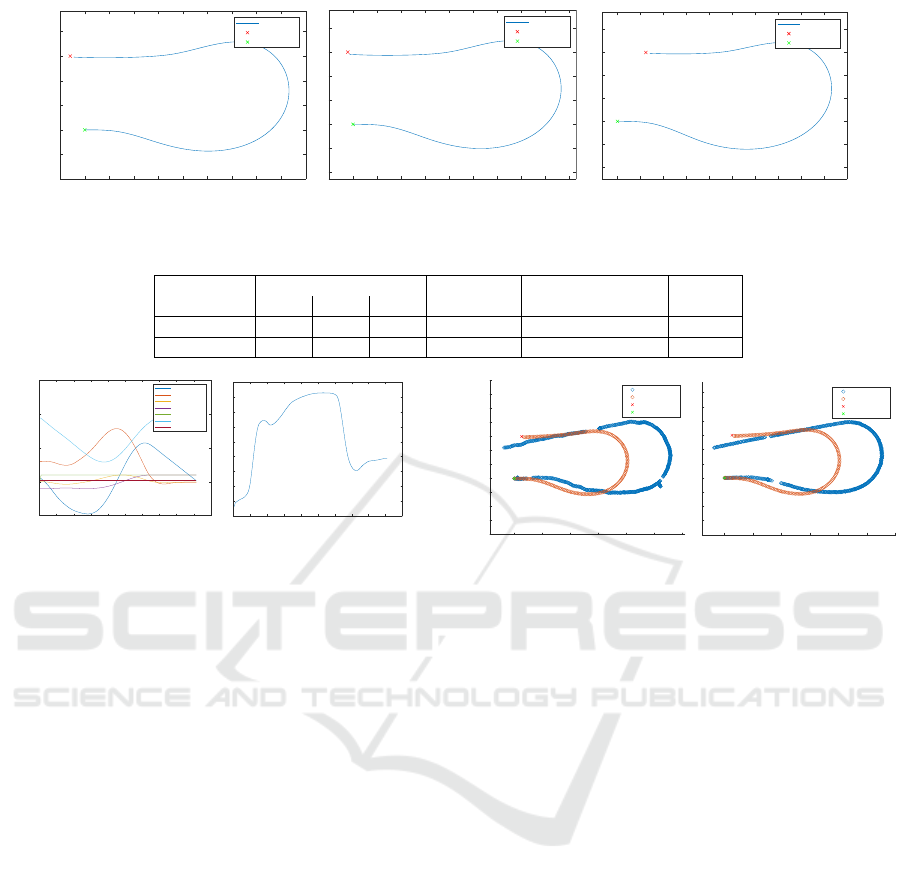
5.2 Generated Trajectories
As expected, the final results are similar to the Du-
bin’s turns, which we use as expert knowledge. To
successfully finish a 3 m turn, the vehicle needs to
steer right first, then do the left turn, and finally steer
back to straighten out the tractor. This can be seen in
the trajectories in Figure 6, as well as in the generated
actions in Figure 7b. Since we are using the deter-
ministic policy for evaluation, we can also see, that
the actions are fairly smooth. There is some minor
overcorrection in the desired steering angle at around
steps 30-40. It is likely that a trajectory without this
correction would be faster, but the agent simply is not
able to learn this. It is a good example of a situation
where the blackbox type approach of artificial neu-
ral networks (ANNs) makes it very hard to find the
exact reasoning for the selected action. All generated
turns reached within 20 cm of the target point. Table 2
shows the metrics we used to evaluate how well the fi-
nal agent did on different difficulties. Comparing the
Reinforcement Learning for Autonomous Headland Turns
323
-1 0 1 2 3 4 5 6 7 8 9
x (m)
-2
-1
0
1
2
3
4
y (m)
Headland Angle: -11.3337°
vehicle path
target
start
-1 0 1 2 3 4 5 6 7 8 9
x (m)
-2
-1
0
1
2
3
4
y (m)
Headland Angle: -4.1876°
vehicle path
target
start
0 1 2 3 4 5 6 7 8 9 10
x (m)
-2
-1
0
1
2
3
4
y (m)
Headland Angle: 24.2928°
vehicle path
target
start
//
Figure 6: Paths generated for multiple headland angles with the basic setup.
Table 2: Success Metrics, tested on random headland angles. TTS is time to success. Results over 1000 episodes.
Strategy Success Rate (%) RMSE (m) Heading RMSE (°) TTS (s)
0.1m 0.2m 0.5m 0.2m
Dubins turn 27.0 32.8 63.7 0.873 3.71 22.16
PPO agent 32.4 100 100 0.133 1.83 20.35
0 20 40 60 80 100 120 140 160 180 200
Step
-5
0
5
10
15
State Value
x error (m)
y error (m)
phi error (sin)
phi error (cos)
velocity (m/s)
dist to edge (m)
headland angle
(a) Observations.
0 20 40 60 80 100 120 140 160 180 200
Step
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
desired steering angle
(b) Generated Action.
Figure 7: Inputs and outputs to the RL agent with the basic
setup.
metrics to the untrained Dubins turns, that are used
as expert knowledge to initiate the training, it is clear
that the trained agent performs significantly better in
all categories.
During training, the heading is an important part
of deciding whether or not an episode was successful
or not (see Equation (9)). This means, that the agents
learns to line up with the intended final heading. For
the success rates shown in Table 2, this angle is not
checked. This is mainly to keep the difficulty cate-
gories simpler, since it is hard to decide which head-
ing threshold to combine with which distance thresh-
old. The heading error shown in the tables is the angle
that was reached for the time step that was closest to
the goal in distance. It is possible, that there is a time
step in the turn, where the sum of positional and an-
gular error is smaller, but this point would depend on
the weight that we would apply to either error. We
instead opt to just use the point with the lowest posi-
tional error. The time to success was also measured to
this time step. Since a constant velocity is used, this
value directly corresponds to the distance traveled.
5.3 Real World Vehicle
A total of 7 turns with the RL agent were performed
on the G-Trac on different surfaces. One of the turns
0 2 4 6 8 10 12
x (m)
-4
-3
-2
-1
0
1
2
3
4
5
6
7
y (m)
gtrac path
simulated path
target
start
(a) Field.
0 2 4 6 8 10 12
x (m)
-4
-3
-2
-1
0
1
2
3
4
5
6
y (m)
gtrac path
simulated path
target
start
(b) Yard.
Figure 8: Paths generated in the real world using the G-
Trac.
had to be excluded from the results. It automatically
stopped in the middle of the turn without any of the
normal failure conditions being met. This was most
likely due to a configuration error, that had nothing to
do with the agent itself.
Figure 8 shows 2 of the recorded turns. Since
all turns have very similar performance, the ones in
the figure are simply chosen for how complete the
recorded position data is. The ones that are presented
have the least amount of GNSS gaps, making them
more useful for visual inspection. In the performance
metrics, no major differences between the different
surfaces can be seen. All of them are therefore com-
bined in the results: Only one turn reaches the goal
within 50 cm, but all reach within 60 cm. The RMSE
is 0.532 m. The average time to reach the closest point
to the goal pose is 42.5 s. The final heading error is
relatively high with an average error of 12.6
◦
.
Figure 8 also shows the agent’s path in the simu-
lation for the same headland angle. It is obvious that
the tractor behaves differently in real life, leading to
a longer turn. This results in observations that were
never seen during training. The agent still manages
to turn with these unexpected observations, but fails
to correct in the final stages. The fact that this small
difference stops the agent from finishing correctly in-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
324

dicates that it has overfitted to the simulated environ-
ment.
6 DISCUSSION AND
CONCLUSION
The results show that an RL based agent is capable of
planning a headland turn and controlling the vehicle
to follow it. The final policy can easily be executed
in under 100ms, meaning that the approach is viable
for running in real time. However, the stability of the
training is still somewhat lacking. While we are able
to find a great policy even with the instability, improv-
ing on this would be desirable to speed up training and
allow for more difficult problems.
Since this paper is intended as a proof-of-concept,
no in-depth comparison to other headland turning al-
gorithms is made. This should be an important com-
ponent for future research into the area.
It is also clear that this implementation does not
use many of the theoretical advantages of RL. Re-
search that focuses on using more complex vehicle
models and optimization goals could greatly benefit
from those strengths.
For the real world application, more techniques to
improve the sim-to-real transfer could be applied. The
results could likely be improved significantly, if the
policy was forced to achieve better generalization.
ACKNOWLEDGMENTS
We would like to thank Michael Maier and Ruben
Hefele for their help with implementing and testing
the policy on the real tractor. We are also very great-
ful for Henri Hornburg’s input on possible algorithms
for the expert knowledge generation.
REFERENCES
Cariou, C., Lenain, R., Thuilot, B., and Martinet, P.
(10.10.2009 - 15.10.2009). Motion planner and
lateral-longitudinal controllers for autonomous ma-
neuvers of a farm vehicle in headland. In 2009
IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 5782–5787. IEEE.
Dubins, L. E. (1957). On Curves of Minimal Length with a
Constraint on Average Curvature, and with Prescribed
Initial and Terminal Positions and Tangents. American
Journal of Mathematics, 79(3):497.
Gao, G., Guo, H., Zhang, J., Zhang, Z., Wu, T., Lu, H.,
Qiu, Z., Chen, H., and Lingxuan, Z. (2023). An ef-
ficient headland-turning navigation system for a saf-
flower picking robot. Journal of Agricultural Engi-
neering, 54(3).
Lazzaroni, L., Pighetti, A., Bellotti, F., Capello, A., Cossu,
M., and Berta, R. (2024). Automated Parking in
CARLA: A Deep Reinforcement Learning-Based Ap-
proach. In Bellotti, F., Grammatikakis, M. D., Man-
sour, A., Ruo Roch, M., Seepold, R., Solanas, A., and
Berta, R., editors, Applications in Electronics Pervad-
ing Industry, Environment and Society, volume 1110
of Lecture Notes in Electrical Engineering, pages
352–357. Springer Nature Switzerland.
Makino, T., Yokoi, H., and Kakazu, Y. (28-30 July 1999).
Development of a motion planning system for an agri-
cultural mobile robot. In SICE ’99. Proceedings of
the 38th SICE Annual Conference. International Ses-
sion Papers (IEEE Cat. No.99TH8456), pages 959–
962. Soc. Instrum. & Control Eng.
Oksanen, T. (2007). Path planning algorithms for agricul-
tural field machines, volume no. 31 0031 of Helsinki
University of Technology Automation Technology
Laboratory Series A Research reports. Helsinki Uni-
versity of Technology, Espoo.
Olcay, E., Rui, X., and Wang, R. (26.08.2023 - 30.08.2023).
Headland Turn Automation Concept for Tractor-
Trailer System with Deep Reinforcement Learning.
In 2023 IEEE 19th International Conference on Au-
tomation Science and Engineering (CASE), pages 1–
7. IEEE.
Sabelhaus, D., R
¨
oben, F., Meyer zu Helligen, L. P., and
Schulze Lammers, P. (2013). Using continuous-
curvature paths to generate feasible headland turn ma-
noeuvres. Biosystems Engineering, 116(4):399–409.
S
´
anchez, M., Morales, J., and Mart
´
ınez, J. L. (2023). Re-
inforcement and Curriculum Learning for Off-Road
Navigation of an UGV with a 3D LiDAR. Sensors
(Basel, Switzerland), 23(6).
Schulman, J., Levine, S., Moritz, P., Jordan, M. I., and
Abbeel, P. (2015). Trust Region Policy Optimization.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal Policy Optimization Al-
gorithms.
Tu, X. (2013). Robust navigation control and headland
turning optimization of agricultural vehicles. PhD
thesis, Iowa State University.
Wiberg, V., Wallin, E., Nordfjell, T., and Servin, M. (2022).
Control of Rough Terrain Vehicles Using Deep Rein-
forcement Learning. IEEE Robotics and Automation
Letters, 7(1):390–397.
Wu, Y., Wang, L., Lu, X., Wu, Y., and Zhang, H.
(27.10.2023 - 29.10.2023). Reinforcement Learning-
based Autonomous Parking with Expert Demonstra-
tions. In 2023 7th CAA International Conference on
Vehicular Control and Intelligence (CVCI), pages 1–
6. IEEE.
Yin, X., Wang, Y., Chen, Y., Jin, C., and Du, J. (2020).
Development of autonomous navigation controller for
agricultural vehicles. International Journal of Agri-
cultural and Biological Engineering, 13(4):70–76.
Zhou, K., Jensen, A. L., Bochtis, D. D., and Sørensen, C. G.
(2015). Quantifying the benefits of alternative field-
work patterns in a potato cultivation system. Comput-
ers and Electronics in Agriculture, 119:228–240.
Reinforcement Learning for Autonomous Headland Turns
325
