
Solving Multi-Agent Pathfinding with Stochastic Local Search SAT
Algorithms
Max Frommknecht
a
and Pavel Surynek
b
Faculty of Information Technology, Czech Technical University in Prague, Th
´
akurova 9, Prague, Czechia
fi fi
Keywords:
Multi Agent Path Finding, SAT, SAT Solver, Local Search, Initial Assignment, Conflict-Driven Clause
Learning.
Abstract:
This paper explores the suitability of Stochastic Local Search (SLS) solvers for Multi-Agent Pathfinding
(MAPF) translated into the SAT domain. Traditionally, SAT encodings of MAPF have been tackled using
Conflict-Driven Clause Learning (CDCL) solvers, but this work investigates the potential of SLS solvers, par-
ticularly ProbSAT, in solving MAPF under the makespan objective. By employing the MDD-SAT approach
and comparing the performance of ProbSAT against the Glucose 4 CDCL solver, the effects of eager and lazy
encodings are evaluated, as well as the benefit of providing initial variable assignments. Results show that
ProbSAT can effectively solve MAPF instances, especially when initial assignments based on agents’ shortest
paths are provided. This study suggests that SLS solvers can compete with CDCL solvers in specific MAPF
scenarios and highlights future research directions for optimizing SLS performance in MAPF.
1 INTRODUCTION
Multi-agent pathfinding (MAPF) is to compute paths
without collisions for multiple agents, from their
starting positions to their goals in a shared envi-
ronment. Managing multiple entities within a con-
strained space is a fundamental problem for many ar-
tificial intelligence and robotics applications, such as
automated warehouse logistics, autonomous vehicles
and digital entertainment (Stern et al., 2019). Single-
agent pathfinding has been solved optimally with the
A* algorithm (Hart et al., 1968) which therefore lends
itself as a reliable basis for many MAPF algorithms.
Optimal path planning for multiple agents is an NP-
Hard problem, presenting significant computational
challenges(Yu and LaValle, 2013a)(Surynek, 2010).
Many different approaches exist to solve the MAPF
problem, some guarantee optimal solutions while oth-
ers sacrifice optimality for performance, prominent
ones are:
Sub-Optimal Solvers: These methods are often effi-
cient and fast but have no guarantee that the solution
is optimal. There are sub-optimal search-based algo-
rithms like Hierarchical Cooperative A*, which plans
the path of each agent consecutively based on a prior-
a
https://orcid.org/0009-0008-1202-3599
b
https://orcid.org/0000-0001-7200-0542
ity heuristic and reserves its locations at certain times
so others will not occupy them (Silver, 2005).
Rule-based algorithms rely on specific instruc-
tions for specific circumstances like Push-and-Swap
which uses the ”push”-rule to guide agents towards
their goal until a conflict arises, which triggers the
”swap”-rule that resolves the conflict by swapping the
positions of the agents according to pre-specified in-
structions (Luna and Bekris, 2011).
It is also possible to combine these two ap-
proaches in algorithms like Flow Annotation Replan-
ning (FAR) which imposes different flows of direc-
tion on parts of the grid space, similar to road net-
works. This limits the state space in which a path is
planned for each Agent individually. Conflicts that
arise are handled locally following a heuristic (Wang
et al., 2008).
Optimal Solvers: While being slower and only able
to handle relatively small numbers of agents, these al-
gorithms can guarantee that a found solution is opti-
mal. Usually, the optimality of these solvers is with
respect to the sum of cost objective, which is the
total cost of the paths of all agents (Standley and
Korf, 2011) or the makespan objective, which is the
cost of the longest path among all agents (Surynek,
2014). There are A*-based algorithms that extend A*
to the multi-agent scenario and make them feasible by
limiting the branching factor or by decomposing the
Frommknecht, M. and Surynek, P.
Solving Multi-Agent Pathfinding with Stochastic Local Search SAT Algorithms.
DOI: 10.5220/0012944800003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 67-78
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
67

MAPF problem into smaller ones that can be solved
independently (Standley, 2010) (Wagner and Choset,
2015).
Conflict-based search (CBS) can use any optimal
single agent pathfinder like A* to find individual paths
for all agents, conflicts in the solution are added as
constraints to prevent conflicts of the individual paths
in the next iteration until there are no conflicts left
(Sharon et al., 2015). There are improved CBS vari-
ants that incorporate changes like merging agents into
meta agents and restarting the search, preferring cer-
tain types of conflicts, bypassing conflicts by trying
a quick fix procedure or incorporating an admissible
heuristic, these additions make the algorithm signif-
icantly more efficient (Boyarski et al., 2015) (Felner
et al., 2018).
Increasing Cost Tree Search (ICTS) stores all
shortest paths for each individual agent in multi-value
decision diagrams (MDD) (Srinivasan et al., 1990) all
MDDs together are viewed as on node in the cost tree.
The cross-product of the MDDs is searched to find
a solution without conflicts. If none is found, new
nodes are created in each of which one agent’s short-
est path and with this its MDD’s length is increased
by one until a node is created from which a solution
can be obtained (Sharon et al., 2013).
Reduction-based approaches translate MAPF to
another domain of problems and search for a so-
lution for it with a solver designed for that do-
main. Mapf has been translated to many domains the
most prominent of which is Constraint Programming
(CP) which includes Boolean Satisfiability (SAT)
(Surynek, 2016), picat (Bart
´
ak et al., 2017), SAT
modulo theory (SMT) (Surynek, 2019b), Answer Set
Programming (ASP) (Erdem et al., 2013) and network
flow problems (Yu and LaValle, 2013b).
None of these methods, whether optimal or sub-
optimal is the definite best approach for all circum-
stances (Felner et al., 2017). It remains to be a topic
of exploration.
2 RELATED WORK
2.1 MAPF SAT
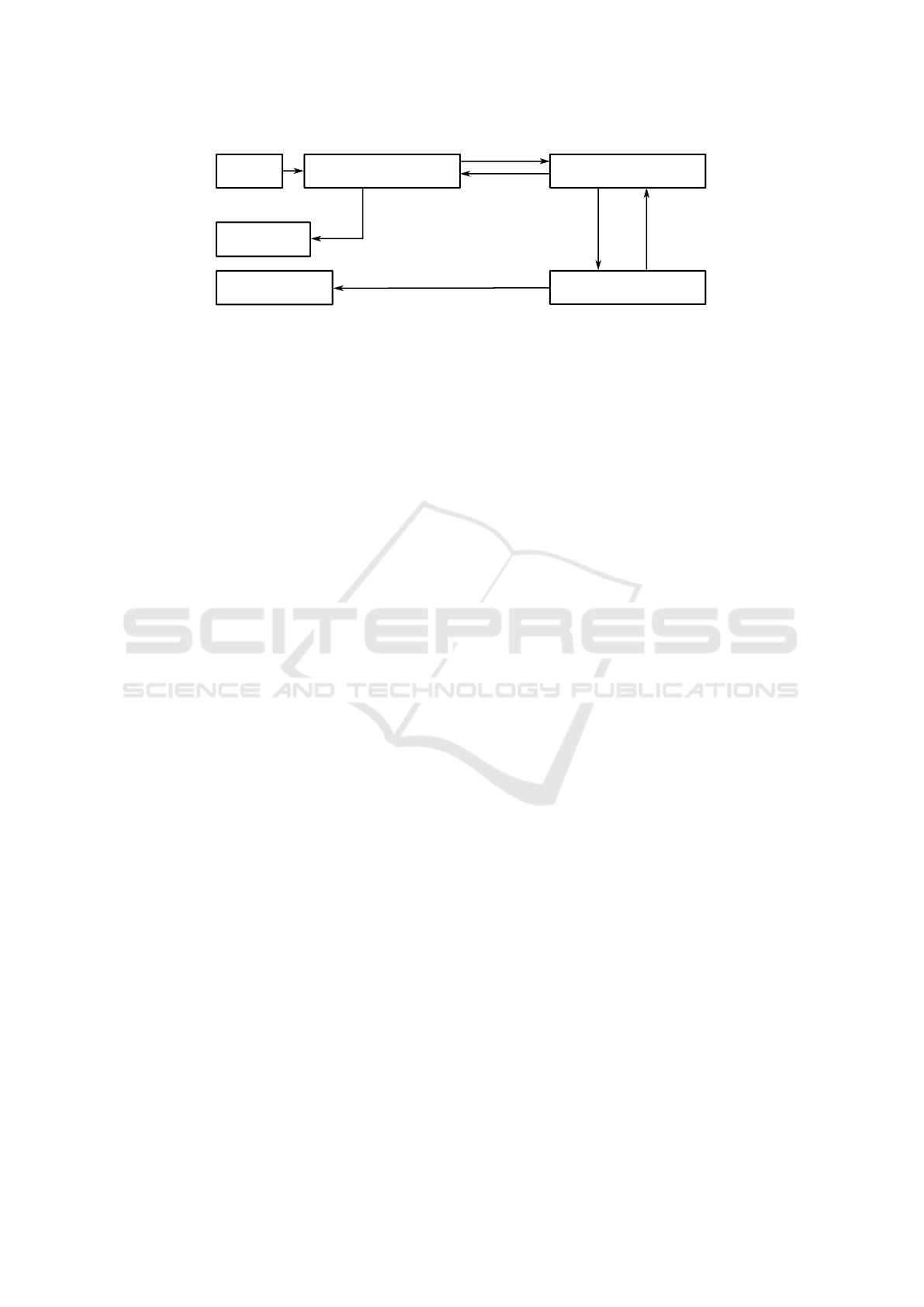
This work explores the translation of MAPF into the
SAT domain under the makespan objective, to find
optimal solutions as shown in figure 1. There are dif-
ferent methods to translate MAPF into a conjunctive
normal form (CNF) formula. The classic approach
to translating a grid world is to use directed acyclic
Time Extension Graphs (TEG) which represent all
MAPF Instance
MDD's
CNF
SAT-Solver
Solution
min Makespan
Makespan+1
Figure 1: Framework for MAPF-SAT.
positions for each timestep for one agent. To trans-
late MAPF into a CNF formula one needs:
• Time-Position variables for all positions at all
times, which are true if the agent occupies a posi-
tion at a certain timestep and false if the agent is
elsewhere. These can be obtained by combining
a TEG for each agent, each vertex gets assigned
one boolean variable.
• Constraints to ensure the agent starts and ends at
the specified positions.
• Position constraints to ensure each agent is only
at one vertex during each time step.
• Movement constraints to ensure agents move
alongside edges.
• Conflict constraints to prevent collisions, adding
one specific clause for all possible collisions that
only allows one of the colliding agents to be at a
certain vertex
This quickly amounts to a very large number of vari-
ables and clauses. A more efficient approach is MDD-
SAT (Surynek et al., 2016) which uses MDDs to store
all possible shortest paths for all agents individually.
Under the sum of cost objective MDDs only con-
tain positions for each timestep that are on one of
the shortest paths from the start to the goal of an
agent. Under the makespan objective, the length of
all agent’s paths is equal to the length of the longest
shortest path of all agents. This makes them much
smaller than TEGs while also reducing the number
of needed collision clauses immensely. While TEGs
of agents share all vertices and thus all vertices at ev-
ery timestep need a collision clause, MDDs often only
overlap partially. So the number of possible collisions
is reduced not only by the difference in possible po-
sitions but also by less overlap between the represen-
tations of agents. MDD-SAT can be further enhanced
to prevent edge conflicts, that is when two agents
traverse the same edge at the same time (Surynek,
2019a). Encoding all conflict constraints is also re-
ferred to as eager encoding. Another way to signifi-
cantly decrease the number of clauses in a CNF is to
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
68
CNF
Unit Propagation
Conflict Analysis
No Conflict
Top level Conflict
All Variables set
Choose Variable
Conflict Backtrack
Solution
Unsatisfiable
Figure 2: Framework for CDCL Solvers.
omit all collision constraints and add them ”lazily”.
After a solution for the CNF is obtained it is checked
for collisions for which constraints are added to the
CNF until a solution without collisions is found. This
is referred to as lazy encoding, which only arrives at
the full (eager) encoding in the worst case and often
finds a solution much earlier (Surynek et al., 2019).
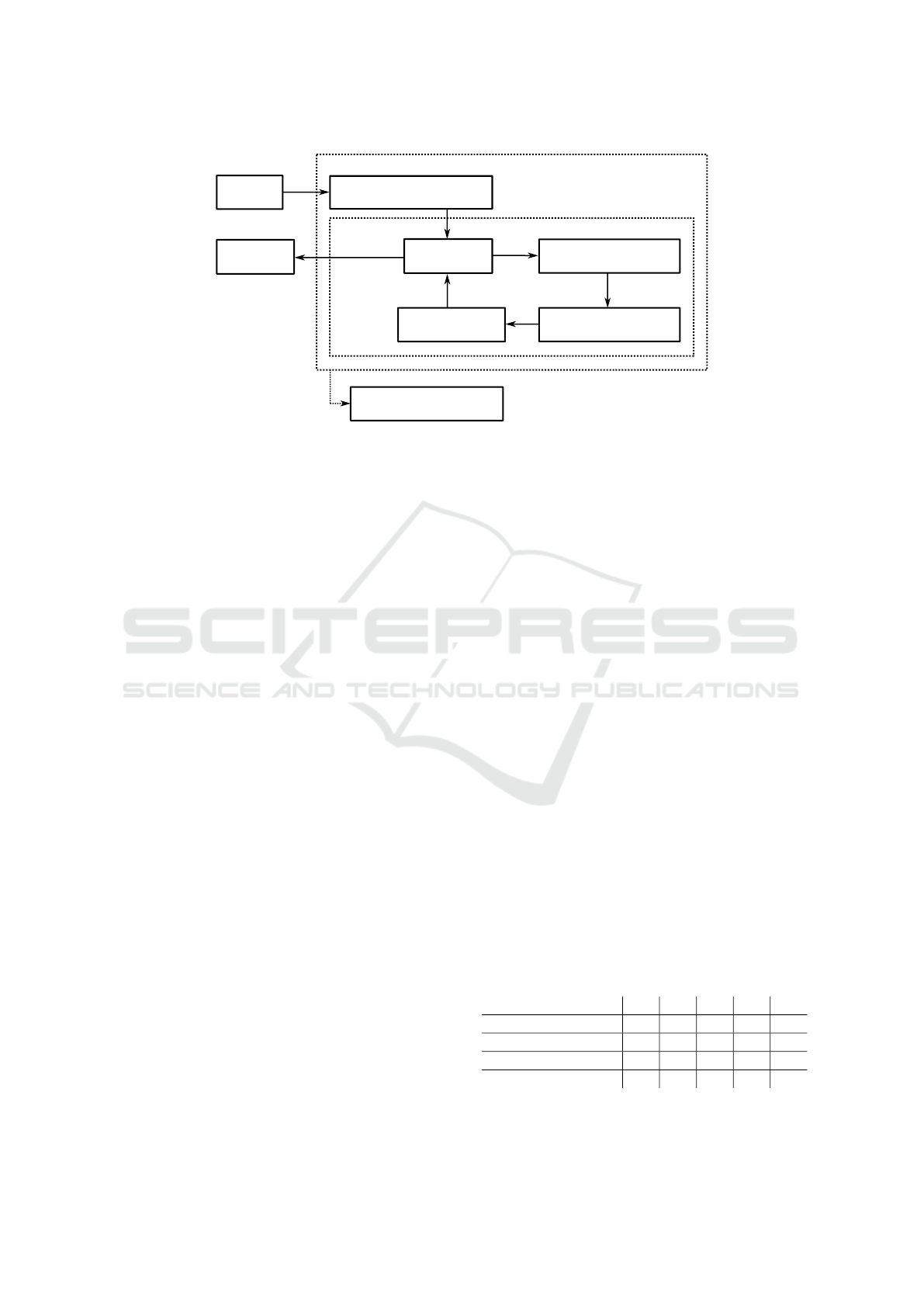
2.2 Stochastic Local Solvers
A popular alternative to Conflict-Driven Clause
Learning (CDCL) shown in figure 2 solvers are
stochastic local search (SLS) solvers shown in fig-
ure 3. SLS solvers operate by assigning all variables
randomly and then flipping single variables to im-
prove the current assignment locally until the CNF is
solved or a pre-specified amount of maximum flips is
reached. If no solution is found the solver is restarted
until a pre-specified amount of maximum restarts is
reached (Biere et al., 2009). Which variable to flip
is the crucial decision. GSAT either changes a vari-
able that will improve the current assignment so that
more clauses are satisfied or with a certain proba-
bility flips a random variable (Selman et al., 1993).
WalkSAT improved upon this design, it randomly se-
lects an unsatisfied clause and flips one of its vari-
ables. This ’makes’ the clause satisfied, however, it
may ’break’ another clause that also holds this vari-
able. The variable that ’breaks’ the least clauses is
chosen to be flipped. If there is a choice that breaks
no other clauses it is always taken. Otherwise, half
of the time a random variable is flipped instead of the
one with the least ’breaks’ (Kautz and Selman, 1996).
The Sparrow solver introduced a novel probabilis-
tic variable selection method and an adaptive noise
mechanism, enhancing its ability to escape local min-
ima and explore the search space more effectively. It
combined these innovations with sophisticated clause
weighting and hybrid heuristics, leading to signifi-
cant performance improvements on industrial bench-
marks.(Balint and Fr
¨
ohlich, 2010).
Preprocessing techniques (PPTs), when appro-
priately parameterized, can significantly enhance
the performance of both SLS and CDCL solvers.
Bounded variable elimination (BVE) is a particularly
effective technique, but optimal configurations for
preprocessing differ between SLS and CDCL solvers
(Balint and Manthey, 2013).
ProbSAT elegantly simplifies this choice by se-
lecting a random clause and assigns a probability
for each of its variables to be flipped. Balint and
Sch
¨
oning propose two different functions, based on
the make- and break-value of a variable as well as a
break (cb) and a make (cm) constant, to compute this
probability. One function takes the constants to the
power of the make- and break-values which is called
Exponential Function. The other function takes the
make- and break-values to the power of the constants
which is called Polynomial Function. Both functions
divide the make-result by the break-result. The op-
timal constants can be fine-tuned for specific prob-
lems. In their experiments, they discover that the
make-result is of little impact and functions that only
use the break-result perform just as well. A higher
cb-value makes the algorithm more greedy(Balint and
Sch
¨
oning, 2012).
Further improvements in SLS solvers for uniform
k-SAT with long clauses include XOR caching, in-
corporating multi-level break-values and improved
clause selection heuristics (Balint et al., 2014). Balint,
Biere, Fr
¨
ohlich, and Sch
¨
oning recommend using
brake2 values (cb2) and the XOR implementation for
structured problems, but to use the XOR caching only
for problems with shorter clause length (k < 7) be-
cause its efficiency in random SAT instances seems to
be in inverse proportional to k. Furthermore, the cb2
values can be computed much more efficiently when
no XOR caching is implemented. For clause selection
in structured problems, the PBFS scheme is recom-
mended. YalSAT employs a diverse set of ProbSAT
algorithms, each incorporating various combinations
of advanced improvements. These algorithms are se-
lected randomly when the solver restarts to enhance
the overall efficiency and effectiveness of the solver
which did well in SAT competitions (Biere, 2014)
(Biere, 2017).
Solving Multi-Agent Pathfinding with Stochastic Local Search SAT Algorithms
69
Clause Selection
Variable Selection
Flip Variable
Satisfied?
No Solution found
CNF
For Max-Tries
Assign all Variables
For Max-Flips
Solution
Yes
No
Figure 3: Framework for SLS Solvers.
The efficiency of SLS solvers is impacted by the
random initialization of all variables at the start. NLo-
calSAT uses a Neural Network to predict a solution
for the CNF. This solution does not solve the CNF but
can serve as the SLS solver’s starting point. On aver-
age 88% of the initial assignment was already correct.
Using this ’smart guess’ as an initial assignment is of-
ten significantly better than a random assignment, the
closer the initialization is to the solution the easier it
is for the solver to find a solution (Zhang et al., 2020).
3 CONTRIBUTION
This work explores if SLS-solvers are suitable for
the MAPF problem. To the author’s awareness, the
MAPF-SAT approach has only been used in combi-
nation with CDCL-solvers. SLS-solvers and CDCL-
solvers for MAPF-SAT are compared in combination
with the MDD-SAT approach (Surynek et al., 2016)
under the makespan objective. The effects of lazy and
eager encodings on the performance are also exam-
ined. Furthermore aiding the solver with a meaning-
ful initial assignment of variables is explored. The
assignment is computed by translating sampled paths
from the MDDs for all agents.
4 METHOD
For the comparison of SLS and CDCL solvers, the
ProbSAT (Balint and Sch
¨
oning, 2012) algorithm was
chosen for its simplicity and Glucose 4.0 (Audemard
et al., 2013) was selected as a fair comparison as
it is a performant solver that was published around
the same time as ProbSAT. Glucose 4.0 is heavily
based on MiniSAT 2.2 (E
´
en and S
¨
orensson, 2003).
Both Solvers were tested with five different variants
shown in table 1. Variants include eager (V 1, V 2)
and lazy encodings (V 3, V 4, V 5). Both encodings are
tested with and without an initial assignment to aid the
solver. When a lazy encoding is used with an initial
assignment (V 4, V5) conflict constraints for all vertex
collisions of the sampled paths are added to the CNF,
this is not necessary for the eager encoding (V 2) be-
cause the CNF already contains conflict clauses that
prevent all possible vertex collision. Update Assign-
ment in table 1 is only relevant for the lazy encoding,
it indicates that after a solution is found by the SAT-
solver which contains conflicts a new assignment is
generated based on the solution (V 3, V 4), if no new
initial assignment is provided (V 5) the initial assign-
ment is used again.
Additionally, for the ProbSAT solver, an alterna-
tive initial assignment that sets all variables negative
was tested. When no initial assignment is provided
and no new initial assignment is generated after a so-
lution with conflicts is found, the solver will most
likely find a new solution that is completely different
from the previous one. Early tests often needed many
iterations to arrive at a solution without conflicts. The
idea is to refine the encoding for one solution, if the
solver is restarted and comes up with a different solu-
tion it takes a lot of additional iterations.
Table 1: Algorithm Variants.
V 1 V 2 V 3 V 4 V 5
Eager Encoding ✓ ✓ - - -
Lazy Encoding - - ✓ ✓ ✓
Initial Assignment - ✓ - ✓ ✓
Update Assignment - - ✓ ✓ -
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
70

4.1 Implementaion
The algorithm 1 was implemented in Python. For
the CDCL SAT solver, PySAT was used which pro-
vides efficient Python wrappers for the code of CDCL
solvers originally implemented in the C/C++ lan-
guages (Ignatiev et al., 2018).
4.1.1 Hyperparameters and Versions of
ProbSAT
For the local SAT solver, brake-only ProbSAT was
chosen, as the make-value for this solver proved to be
of little impact compared to the brake-value (Balint
and Sch
¨
oning, 2012). No optimal brake-constant (cb)
value for MAPF-SAT is known and it probably varies
with the size of the statespace. Therefore the cb-
values derived by Balint and Sch
¨
oning from experi-
ments with k-SAT, which are dependent on the max-
imum clause size (k), were used. Whether the poly-
Table 2: cb values for different k.
k ≤ 3 4 5 6 ≥ 7
oldcb 2.06 2.85 3.7 5.1 5.4
newcb 2.06 3.0 3.88 4.6 4.6
nomial or exponential function of the ProbSAT algo-
rithm is better suited for MAPF-SAT is also unknown
but it was shown that for smaller maximum clause
lengths (k ≤ 4) the polynomial function worked better
and for larger ones the exponential function worked
better (Balint and Sch
¨
oning, 2012). Thus unless the
MAPF instance is very small the exponential function
with the highest cb value is chosen. The original ver-
sion of this algorithm that does not use the make value
and is written in the C language was obtained from
GitHub (Adrian Balint, 2022). This version from
2012 comes with the ’old cb’ values shown in table 2
and uses Pseudo Depth First Search (PDFS) for clause
selection, it will be referred to as old-ProbSAT. PDFS
improves on random clause selection by iterating over
the list of unsatisfied clauses, selecting the clause at
index j%m (% = modulo), where j is the number of
flips and m is the highest index of the list of unsatis-
fied clauses. It is not clear why exactly this performs
much better but it is probably related to incorporating
the flips into the decision and it might select clauses
more evenly. A newer version from 2014 that imple-
ments the possibility of using XOR caching of brake
values, computation of a second brake value with a
second brake constant (cb2 = 1), and refined newcb
values shown in table 2 (Balint et al., 2014). This
version was also used by NlocalSAT (Zhang et al.,
2020). The newer version will be referred to as new-
ProbSAT.
These versions were modified to be able to in-
corporate an initial assignment of variables. Further-
more, additional timers were implemented to obtain
the time it took to find a solution or terminate. The
Maximum number of flips before a restart was config-
ured to 10000000, with the maximum number of tries
set to 1000. In later tests, the maximum tries were
set to 100 or 10 to reduce the run time for instances
without a solution.
4.1.2 Creating the CNF with MDDs
The makespan was determined by comparing the
length of all the shortest paths of all agents. To be
able to create the MDDs a distance matrix was cre-
ated for each agent using the Dijkstra algorithm which
holds the distance from all vertices to the goal. The
MDDs were created with the distance matrices, the
starting points, and the makespan by evaluating dur-
ing each timestep which neighbouring positions of
reached vertices can still reach the goal in the remain-
ing time.
The CNF was created by adding one variable for
each node in the MDDs, representing all possible
agent positions on the shortest paths to the goal. For
each layer (timestep) in the MDDs, one clause was
added that constrained the agent to be at one of the
valid positions at that timestep. This also ensures
agents start at the start and finish at the goal since
the first and last layers of the MDDs only hold the
start and the goal respectively. Movement constraints
were added to ensure each agent only moves from one
node to its children nodes in the MDD, which can in-
clude the same position if there is sufficient time to
still reach the goal if the agent waits. For the ea-
ger encoding, all possible conflicts were determined
by computing the overlap of the MDDs, and conflict
constraints were added for all overlapping nodes.
4.1.3 Initial Assignments
Initial assignments for the ProbSAT solver are cre-
ated by sampling paths from all agent’s MDDs and
translating them to a solution of the CNF, assigning
all variables representing the paths as true and all oth-
ers as false. Initial assignments for the Glucose are
also called assumptions and will be part of the solu-
tion the solver finds. It is necessary to only supply a
partial assignment that leaves room for the solver to
find a valid solution. This was achieved by first sam-
pling paths from the MDDs which are then checked
for collisions. For each found collision the path of
one or both agents of each collision can be excluded,
resulting in a partial assignment that has no conflicts.
It was first decided to only exclude one agent’s path
Solving Multi-Agent Pathfinding with Stochastic Local Search SAT Algorithms
71
per collision to aid the solver more. This sometimes
caused the solver to not find a solution with the ini-
tial makespan because the assumptions were too strict
and led to an unnecessary increase in the makespan.
Thus for later tests, it was decided to exclude all paths
of agents involved in collisions from the assumption
assignment.
The solution a solver which is working with a lazy
encoding needs to be checked for collisions. If any
are found constraint clauses to prevent these colli-
sions are added to the CNF and the solver runs again.
Either with the same initial assignment or with an up-
dated version. The Glucose solver always requires to
exclude the paths of agents involved in newly found
collisions from it assumptions to be able to find a so-
lution with the new constraints. The update Assign-
ment version of the algorithms constructs a new initial
assignment from the latest solution instead of always
working with the same assignment which was com-
puted from by sampling paths from the MDDs.
Data: MAPF problem: set of starts and goals,
grid map
Result: Shortest paths for each set of starts and
goals
Makespan = length of the longest shortest path
across all agents ;
Solution found = False;
while not Solution found do
MDDs = Create MDDs from paths with
length of Makespan;
CNF = Create CNF from MDDs ;
if Initial Assignment then
Initial Assignment(MDDs);
check for collisions;
Add collisions constraints to CNF;
end
Solution found = SAT-Solver(CNF);
check solutions for collisions;
while Solution contains collisions do
Add Collision constraints to CNF ;
if Update Initial Assignment then
new Initial Assignment(solution)
end
Solution found = SAT-solver(CNF) ;
check solutions for collisions;
end
Makespan ++;
end
Algorithm 1: SAT solver with lazy encoding.
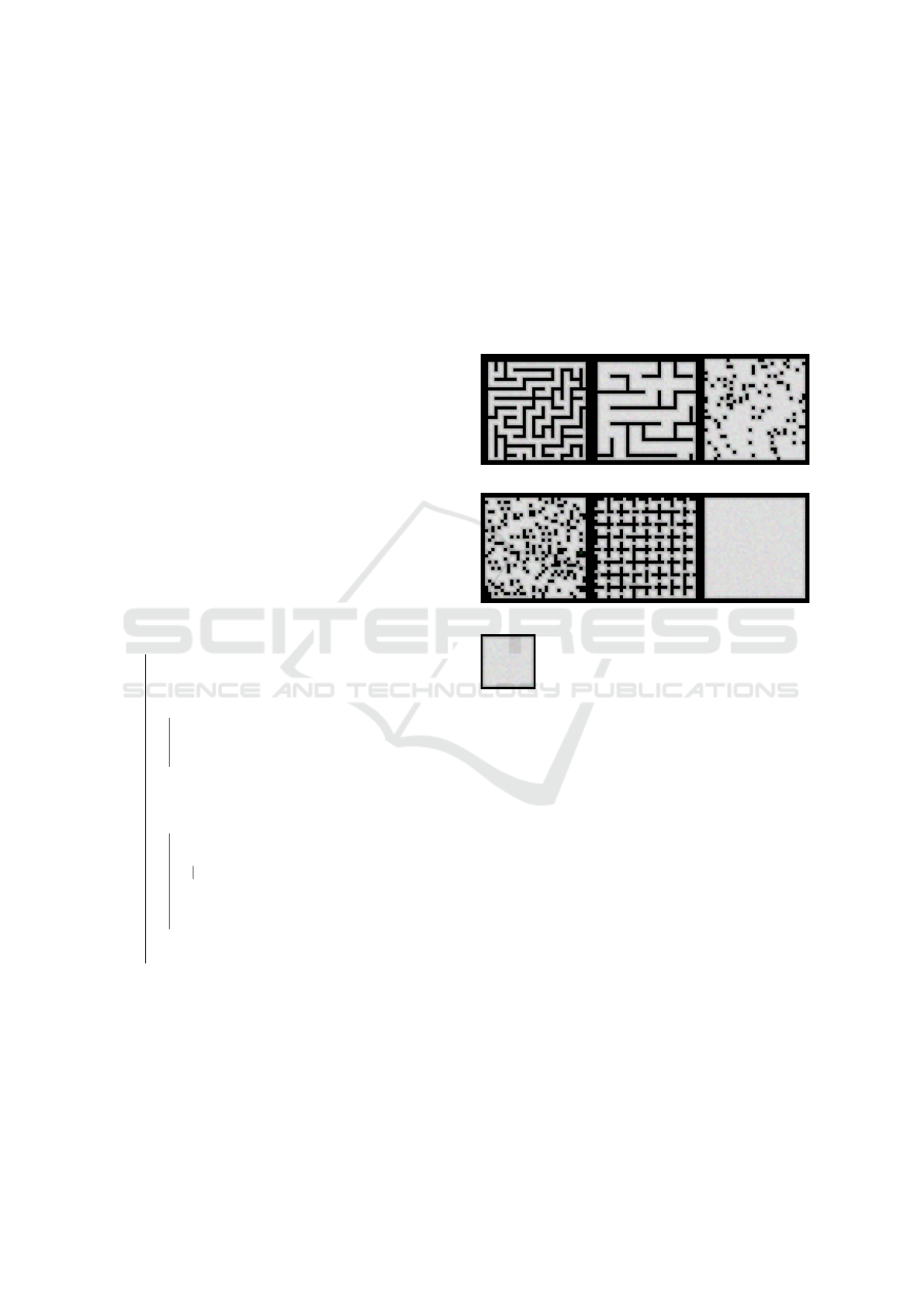
4.2 Benchmarks
The Sat Solvers were compared on the maps ’empty-
16-16’, ’empty-32-32’, ’maze-32-32-2’, ’maze-
32-32-4’, ’random-32-32-10’, ’random-32-32-20’,
’room-32-32-4’ which are published on movin-
gai.com in the benchmark section (Stern et al., 2019).
Six of the maps shown in figure 4 have a grid size of
32x32 and one has a grid size of 16x16. For each map,
movingai.com also provides 25 even and 25 random
scenarios with starts and goals for agents. All algo-
rithm variants were tested on all maps with 10 agents
100 times. 10 sets of starts and goals for the agents
were obtained from the first 10 even scenarios of each
map. This amounts to 700 tests for every variant of
all algorithms.
maze-32-32-2 maze-32-32-4 random-32-32-10
random-32-32-20 room-32-32-4 empty-32-32
empty-16-16
Figure 4: The Benchmark Maps of movingai.
4.3 Hardware
The algorithm was run in Visual Studio Code on
a Framework Laptop 13 with a 13th Gen Intel(R)
Core(TM) i7-1360P processor and 32GB SO-DIMM
DDR4 Synchronous 320 working memory.
5 RESULTS
In only two of the 700 tests that were carried out for
each variant of each solver, it was not possible to
find a solution with the initial makespan, which led
the ProbSAT solvers to run through all of their flips
(10000000) for each of their tries until they reached
their max tries. These two tests were excluded from
the data analysis for all solvers because they heavily
skew the means for ProbSAT. During all other tests,
the ProbSAT solvers found a solution on the first try,
in the two tests in which the makespan needed to be
increased the ProbSAT algorithms also only needed
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
72

one try after the increase was made. Originally the
max tries parameter was set to 1000 in later experi-
ments it was reduced to 100 and eventually reduced
to 10 but could have been set to 1 too as that would
have been sufficient in this dataset.
The assumptions provided for the Glucose solver
initially only excluded one agent’s path of each col-
lision that was found in the initial assignment, this
proved rather restrictive as the Glucose solver was un-
able to find a solution with the initial makespan for 50
out of the 700 tests. Relaxing the initial assumptions
by excluding all paths of agents which are involved in
a collision prevented these increases in makespan.
5.1 Creation of MDDs
MDDs were always created in the same way for both
solvers across all variants. The mean creation time
was 0.3736s (std= 0.4770s). The faster creation only
took 0.0045s while the longest took 7.4262s. The
time it takes to create a MDD is proportional to the
makespan (mean:52.68, std:24.36) which had a mini-
mum of 11 and a maximum of 114.
5.2 Comparing Eager and Lazy
Encoding
Creating eager and lazy CNF encodings from the
MDDs involved a mean of 58553 variables (std =
37831), the smallest CNF consisted of only 1190 vari-
ables while the biggest consisted of 185539. Eager
encodings had a mean of 7238475 clauses (std =
6547660, min = 11726, max = 47621632) while lazy
encodings had a mean of 7174070 (std = 6491100,
min = 11124, max = 47234525). The lazy encod-
ing was computed in a mean time of 16.0434s (std =
18.5569s) while it took an average of 17.0622s (std =
19.1832s) to compute the eager encoding, the lazy
encoding was computed significantly(p = 3.252e
−5
)
faster than the eager encoding by approximately one
second. This gives a headstart to variants V 3, V 4 and
V 5.
5.3 Solver Comparison
The upper part of table 3 depicts the mean number
of operations the variants (see table 1) of all tested
solvers needed to arrive at a valid solution. For Glu-
cose4 these operations consist of the decisions and
the propagations together, which are also shown sepa-
rately in table 4 in the appendix. The number of oper-
ations for ProbSAT is the number of flipped variables.
The lower part of table 3 shows the mean cpu-time
the solvers needed to compute a solution. The run-
time and number of operations for V1 and V2 were
obtained from single runs, while the entries of the
variants V3, V4 and V5 are the sum of multiple runs,
where each run refined the CNF by adding found col-
lisions until a valid solution was found.
Glucose V2 exhibited the fastest solving time,
whereas ProbSAT (oldcb, cb2) V2 required the fewest
operations.
5.3.1 Number of Operations
Differences Between Solvers: An ANOVA test fol-
lowed by Tukey’s HSD post hoc significance test with
a significance Niveau of 0.05% showed a significant
difference between the number of operations of the
Glucose4 solver and all ProbSAT solvers.
Differences Between Variants: Testing for signifi-
cant differences between the variants regarding solver
operations revealed two significantly different groups,
V1, V3 and V2, V4, V5. A follow-up test in each of
these groups found no significant difference between
V1 and V3, no significant differences between V2 and
V4 but a significant difference between V5 and V2 as
well as between V5 and V4.
Differences Between All Instances: An ANOVA test
followed by Tukey’s HSD post hoc significance test
with a significance niveau of 0.05% revealed that the
number of operations are significantly different be-
tween Glucose and all ProbSAT versions and between
most Variants. No significant difference was found
across the different versions of ProbSAT in the vari-
ants V1, V2, V3 V4 and V5, also no significant dif-
ference between variants V1 and V3, as well as no
significant difference between V2, V4 and V5 (for
ProbSAT) was found. Furthermore, there was no sig-
nificant difference between Glucose4 V4 and V5.
5.3.2 Runtimes
Differences Between Solvers: An ANOVA test fol-
lowed by Tukey’s HSD post hoc significance test with
a significance niveau of 0.05% showed a significant
difference between the solving times of the Glucose4
solver, the newProbSAT solvers and the oldProbSAT
solvers, but no significant differences between old and
new cb values. No significant differences between
the newProbSAT versions suggest that the influence
of the cb2 parameter is very small.
Differences Between Variants: An ANOVA test fol-
lowed by Tukey’s HSD post hoc significance test with
a significance niveau of 0.05% found no significant
differences between the variants V 4 and V 5. There
were significant differences between all other vari-
ants.
Solving Multi-Agent Pathfinding with Stochastic Local Search SAT Algorithms
73
Table 3: Runtimes and operations of different solvers.
Solver Operations V 1 V 2 V 3 V 4 V 5
Glucose 4 115933.63 8240127 188023.93 159542.32 152200.24
ProbSAT (newcb,cb2) 28573.17 10.67 28577.42 10.59 14.00
ProbSAT (oldcb,cb2) 28572.66 10.20 28577.41 10.45 14.58
ProbSAT (newcb,nocb2) 28573.17 10.68 28577.42 10.25 14.01
oldProbSAT (oldcb) 28634.05 10.57 28638.58 10.33 14.10
oldProbSAT (newcb) 28634.34 10.49 28638.59 10.81 14.67
Solver Times [s]
Glucose 4 0.0234 0.0233 0.0378 0.0385 0.0350
ProbSAT (newcb,withcb2) 0.0930 0.0447 0.1265 0.0486 0.0488
ProbSAT (oldcb,withcb2) 0.0909 0.0424 0.1227 0.0467 0.0469
ProbSAT (newcb, nocb2) 0.0914 0.0430 0.1242 0.0466 0.0462
oldProbSAT (oldcb) 0.1126 0.0292 0.1211 0.0312 0.0318
oldProbSAT (newcb) 0.1138 0.0292 0.1217 0.03187 0.03186
Differences Between All Instances: An ANOVA test
followed by Tukey’s HSD post hoc significance test
with a significance niveau of 0.05% revealed three
significantly different groups of solver times. The first
group includes all Glucose4 variants and the variants
V2, V4 and V5 of the oldProbSAT, the second group
includes all ProbSAT V3 versions and the oldProb-
SAT V1 versions and the third group includes all new-
ProbSAT V1 versions. Since there were a lot of tests
carried out Tukey’s HSD post hoc is rather restric-
tive as it adjusts for the number of carried out tests.
Thus three more significance tests were carried out,
one in each of the three found groups. Only the test
in the first group revealed significant differences be-
tween the following subgroups: Glucose V1 and V2,
Glucose V3 and V4, and oldProbSAT V2, V4, V5,
Glucose V5.
5.4 Alternative Initial Assignment
The alternative initial assignment which set all vari-
ables to negative also referred to as zero initialization
was only tested with some solver versions of ProbSAT
V2, V4 and V5 and are shown in table 4 in the ap-
pendix. This form of the initial assignment was very
helpful to the solver, decreasing the needed operations
and CPU time immensely but the performance with it
was still significantly worse compared to the initial
assignment based on the shortest paths.
6 DISCUSSION
The results demonstrate that SLS solvers, specifically
ProbSAT, are viable alternatives to CDCL solvers like
Glucose 4.0 for solving the MAPF problem under the
makespan objective.
6.1 Initial Assignments
One key finding is the significant performance im-
provement when initial variable assignments based on
agents’ shortest paths are provided. This suggests that
the quality of initial assignments is crucial for the ef-
ficiency of SLS solvers in this domain.
While the ProbSAT algorithms performed much
better when given an initial assignment the Glucose4
algorithm does not show a huge benefit. When their
number of operations is examined closer (see table 4)
it reveals that in variants V1 and V2, the number of
decisions decreases while the number of propagations
remains the same, this suggests that for computation
time the propagations are more relevant compared to
the decisions. The results also suggest that updating
the initial assumptions for the Glucose solver based
on found solutions leads to a slight decrease in per-
formance while sticking with the same initial assump-
tions and only excluding paths of agents involved in
collisions does perform slightly better. However us-
ing relaxed assumptions can theoretically still prevent
the solver from finding a solution, which can be pre-
vented by decreasing the number of assumptions to
zero before an increase in makespan is carried out.
Providing an initial assignment for the ProbSAT al-
gorithms that represents the latest found solution with
collisions decreases the needed number of operations
slightly compared to always using the same initial as-
signment. This effect is more apparent when exam-
ining the number of operations for the zero initialisa-
tion where the number of operations was reduced by
approximately 65%. While the zero initialization is a
significant improvement over no initialization it per-
forms worse compared to the initialization based on
the shortest paths. However, it is an alternative that
needs less computation compared to the shortest path
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
74
Table 4: Operations and Runtimes of different solvers.
Solver V 1 V 2 V 3 V 4 V 5
Glucose4 Decisions 57490.87 23958.51 76533.57 43373.08 47648.82
Glucose4 Propagations 58442.76 58442.76 111490.36 116169.24 104551.42
ZeroInit operations
ProbSAT (newcb,cb2) - 539.3879 - 546.2040 1588.4741
ProbSAT (oldcb,cb2) - 539.1465 - 546.1868 1521.0201
oldProbSAT (oldcb) - 539.1264 - 545.7845 1514.1178
ZeroInit Times [s]
ProbSAT (newcb,cb2) - 0.0532 - 0.0985 0.1490
ProbSAT (oldcb,cb2) - 0.0673 - 0.1110 0.1809
oldProbSAT (oldcb) - 0.0330 - 0.0643 0.0879
initialization, which might be relevant if more agents
are deployed or when bigger maps are used.
6.2 Lazy and Eager Encoding
Another finding is that lazy encodings are computed
more rapidly than eager encodings. While solvers of-
ten have to run multiple times with the lazy encoding
leading to longer solving times compared to the ea-
ger encoding, they are still faster since the time saved
during the computation of the encoding exceeds the
extra solving time. The most performant variants are
V4 and V5, which do not significantly differ in com-
putation time.
6.3 Solver Performance
Overall the fastest observed performances were the
oldProbSAT versions V4 and V5 as well as the Glu-
cose4 V5, as there was no significant difference be-
tween their computation times, ProbSAT can solve
the MAPF problem just as well as Glucose 4 on the
examined maps when the makespan did not need to
be increased. For the cases when the makespan does
need to be increased, it is crucial to have the smallest
possible amount of maxTries and maxFlips, while the
observed performance suggests that maxTries can be
set to 1 the optimal number of flips is not easy to de-
cide but should probably be based on the number of
variables and clauses of the CNF.
It is also astonishing how few operations the Prob-
SAT solver needs when an initial assignment, based
on the shortest paths of the agents, is provided. There
is also a not significant but slight difference between
old and new cb values, which suggests that a greed-
ier algorithm might need fewer operations. Using a
cb2 value did not have a significant effect. The older
implementation of ProbSAT is more performant with
an initial assignment but less performant without it
compared to the newer implementation. They make
no significantly different amount of flips, jet the old
version is significantly faster.
6.4 Future Research Directions
Optimization of Initial Assignments: With an ini-
tial assignment the problem does not seem so hard
anymore as the number of operations becomes very
few for the ProbSAT algorithms. The initial as-
signments based on sampled shortest paths from the
MDDs worked well but all paths are chosen randomly.
This might be improved by guiding the sampling of
the initial paths preventing agents from entering the
same regions if possible and thereby preventing some
collisions as agents occupy different parts of the map.
Including Edge Conflicts: The presented algorithm
does not detect edge conflicts, which means agents
are allowed to swap positions. This can be solved by
including edges in the MDD encodings and handling
them like additional positions. Alternatively, it is also
possible to use the current vertex encodings and check
for edge conflicts in the solution. If any occur special
edge conflict clauses, to prevent a position swap, can
be added to the CNF.
Scaling to Larger Problems: It would be valuable
to investigate how the performance of SLS solvers
with different hyperparameters and the initial assign-
ments scales with larger maps and a greater number
of agents.
6.4.1 Parameter Tuning
The cb parameters for ProbSAT used in this study
were tuned based on uniform k-SAT instances (Balint
and Sch
¨
oning, 2012) (Balint et al., 2014). There was
no significant difference between the tested cb val-
ues. However, there are probably more optimal set-
tings for MAPF-SAT. The slight difference in perfor-
Solving Multi-Agent Pathfinding with Stochastic Local Search SAT Algorithms
75

mance with the old and the new cb values suggests
that being greedier might be more beneficial in com-
bination with an initial assignment.
Determining that there is no solution with the ini-
tial makespan and deciding to increase it is crucial
and can be done by the ProbSAT solver in a reason-
able time if the maxTries and maxFlips are adjusted
to be as little as possible. More exploration in sce-
narios that are not solvable with the initial makespan
is needed to form a better understanding of feasible
settings for the maxTries and maxFlips parameters al-
though the results of this study suggest a maxTries
value of 1 is sufficient with a relatively large number
of maxFlips and the tested cb values.
An interesting approach would be to reduce the
number of flips to very few and try to find a solu-
tion with a high cb value at first and to decrease the
cb value while increasing the number of flips during
consecutive tries.
6.4.2 Exploration of Different Algorithms
Extending the study to other SLS solvers and to other
objectives like the sum of cost objective, which ex-
pands the MDDs individually, could provide a more
comprehensive understanding of the strengths and
limitations of SLS solvers in MAPF. An interesting
addition to the ProbSAT solver is the xor caching of
brake values, which was found to be too costly for
bigger clauses (k > 6), but Balint, Biere, Fr
¨
ohlich, and
Sch
¨
oning suggest a hybrid solution that performs xor
caching for clauses of length 3 or less but does not for
longer ones. They also suggest clause weights as one
way to improve the quality of clause selection heuris-
tics (Balint et al., 2014).
Hybrid Solvers: Another promising avenue of re-
search combines CDCL and local solvers into hy-
brid solvers which outperform most other solvers that
solely rely on one of the two paradigms (Cai and
Zhang, 2021). In the 2020 SAT competition all win-
ning solvers of the Main track periodically schedule
runs of a SLS solver and import statistical informa-
tion generated in unsuccessful SLS runs to reconfig-
ure weights in their branching heuristics (Froleyks
et al., 2021).
Neural Networks: The usage of Neural Networks
(NNs) proved beneficial for the NlocalSAT algorithm
to find meaningful initial assignments for SLS solvers
(Zhang et al., 2020). NNs have also been used for
CDCL solvers and are utilizable for performance im-
provements (Selsam et al., 2018) (Li and Si, 2022).
6.5 Limitations
Benchmarks: The study was conducted on a spe-
cific set of benchmark maps, which do not cover the
full spectrum of MAPF problem instances encoun-
tered in practical applications. Future work should
include a wider variety of MAPF instances, such as
those with different grid sizes, obstacle densities, and
agent counts.
Computational Resources: The experiments were
run on a single type of hardware. Performance eval-
uations on different hardware configurations would
provide a more generalizable understanding of the
solvers’ efficiency and how performance scales with
computational power and memory availability.
Implementation Constraints: While the solvers
were implemented in C++, the overarching algorithm
was implemented in Python, which may not be the
most efficient programming language for this pur-
pose. Implementing the algorithms in a more perfor-
mant language like C++ could yield different results.
7 CONCLUSION
This study has shown that SLS solvers, particu-
larly ProbSAT, are capable of effectively solving the
MAPF problem under the makespan objective. The
key finding is that providing meaningful initial as-
signments significantly boosts the performance of
SLS solvers, bringing them on par with CDCL solvers
like Glucose 4.0 in specific scenarios. This insight
opens up new avenues for research and development
in the field of MAPF. These are the contributions of
this study to the Field:
• Introduction of SLS Solvers to MAPF: It was
demonstrated that SLS solvers are viable options
for MAPF, adding them to the range of tools avail-
able for researchers and practitioners.
• Insights into Initial Assignments: Providing a
meaningful initial assignment that serves as a
starting point which is already closer to a solu-
tion can greatly enhance the performance of SLS
solvers.
• Lazy Encoding Efficiency for SLS Solvers:
Lazy encodings are faster to compute than eager
encodings and should be preferred when working
with SLS solvers, despite the need for multiple
solver runs.
In conclusion, this study provides a foundational ex-
ploration into the viability of SLS solvers for MAPF,
highlighting the importance of initial assignments and
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
76

suggesting several promising directions for future re-
search. By improving and extending the use of SLS
solvers, we can enhance the efficiency and scalability
of MAPF solutions, benefiting a wide range of practi-
cal applications.
ACKNOWLEDGEMENTS
This research has been supported by GA
ˇ
CR - the
Czech Science Foundation, grant registration number
22-31346S.
REFERENCES
Adrian Balint, M. S. (2022). ProbSAT: an efficient im-
plementation of a variant of the probsat solver pre-
sented in: ”choosing probability distributions for
stochastic local search and the role of make ver-
sus break” by adrian balint, uwe sch
¨
oning. GitHub:
https://github.com/adrianopolus/probSAT.
Audemard, G., Lagniez, J.-M., and Simon, L. (2013). Im-
proving glucose for incremental sat solving with as-
sumptions: Application to mus extraction. In Interna-
tional conference on theory and applications of satis-
fiability testing, pages 309–317. Springer.
Balint, A., Biere, A., Fr
¨
ohlich, A., and Sch
¨
oning, U. (2014).
Improving implementation of sls solvers for sat and
new heuristics for k-sat with long clauses. In Theory
and Applications of Satisfiability Testing–SAT 2014:
17th International Conference, Held as Part of the Vi-
enna Summer of Logic, VSL 2014, Vienna, Austria,
July 14-17, 2014. Proceedings 17, pages 302–316.
Springer.
Balint, A. and Fr
¨
ohlich, A. (2010). Improving stochastic lo-
cal search for sat with a new probability distribution.
In Theory and Applications of Satisfiability Testing–
SAT 2010: 13th International Conference, SAT 2010,
Edinburgh, UK, July 11-14, 2010. Proceedings 13,
pages 10–15. Springer.
Balint, A. and Manthey, N. (2013). Boosting the perfor-
mance of sls and cdcl solvers by preprocessor tuning.
In POS@ SAT, pages 1–14.
Balint, A. and Sch
¨
oning, U. (2012). Choosing probability
distributions for stochastic local search and the role
of make versus break. In International Conference
on Theory and Applications of Satisfiability Testing,
pages 16–29. Springer.
Bart
´
ak, R., Zhou, N.-F., Stern, R., Boyarski, E., and
Surynek, P. (2017). Modeling and solving the multi-
agent pathfinding problem in picat. In 2017 IEEE 29th
International Conference on Tools with Artificial In-
telligence (ICTAI), pages 959–966. IEEE.
Biere, A. (2014). Yet another local search solver and
Lingeling and friends entering the SAT Competition
2014. In Balint, A., Belov, A., Heule, M., and
J
¨
arvisalo, M., editors, Proc. of SAT Competition 2014
– Solver and Benchmark Descriptions, volume B-
2014-2 of Department of Computer Science Series of
Publications B, pages 39–40. University of Helsinki.
Biere, A. (2017). Cadical, lingeling, plingeling, treengeling
and yalsat entering the sat competition 2018. Proceed-
ings of SAT Competition, 14:316–336.
Biere, A., Heule, M., and van Maaren, H. (2009). Handbook
of satisfiability, volume 185. IOS press.
Boyarski, E., Felner, A., Stern, R., Sharon, G., Betza-
lel, O., Tolpin, D., and Shimony, E. (2015). Icbs:
The improved conflict-based search algorithm for
multi-agent pathfinding. In Proceedings of the In-
ternational Symposium on Combinatorial Search, vol-
ume 6, pages 223–225.
Cai, S. and Zhang, X. (2021). Deep cooperation of cdcl
and local search for sat. In Theory and Applications
of Satisfiability Testing–SAT 2021: 24th International
Conference, Barcelona, Spain, July 5-9, 2021, Pro-
ceedings 24, pages 64–81. Springer.
E
´
en, N. and S
¨
orensson, N. (2003). An extensible sat-solver.
In International conference on theory and applica-
tions of satisfiability testing, pages 502–518. Springer.
Erdem, E., Kisa, D., Oztok, U., and Sch
¨
uller, P. (2013).
A general formal framework for pathfinding problems
with multiple agents. In Proceedings of the AAAI Con-
ference on Artificial Intelligence, volume 27, pages
290–296.
Felner, A., Li, J., Boyarski, E., Ma, H., Cohen, L., Kumar,
T. S., and Koenig, S. (2018). Adding heuristics to
conflict-based search for multi-agent path finding. In
Proceedings of the International Conference on Au-
tomated Planning and Scheduling, volume 28, pages
83–87.
Felner, A., Stern, R., Shimony, S., Boyarski, E., Golden-
berg, M., Sharon, G., Sturtevant, N., Wagner, G., and
Surynek, P. (2017). Search-based optimal solvers for
the multi-agent pathfinding problem: Summary and
challenges. In Proceedings of the International Sym-
posium on Combinatorial Search, volume 8, pages
29–37.
Froleyks, N., Heule, M., Iser, M., J
¨
arvisalo, M., and Suda,
M. (2021). Sat competition 2020. Artificial Intelli-
gence, 301:103572.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE transactions on Systems Science and
Cybernetics, 4(2):100–107.
Ignatiev, A., Morgado, A., and Marques-Silva, J. (2018).
PySAT: A Python toolkit for prototyping with SAT or-
acles. In SAT, pages 428–437.
Kautz, H. and Selman, B. (1996). Pushing the envelope:
Planning, propositional logic, and stochastic search.
In Proceedings of the national conference on artificial
intelligence, pages 1194–1201.
Li, Z. and Si, X. (2022). Nsnet: A general neural probabilis-
tic framework for satisfiability problems. Advances
in Neural Information Processing Systems, 35:25573–
25585.
Solving Multi-Agent Pathfinding with Stochastic Local Search SAT Algorithms
77

Luna, R. and Bekris, K. E. (2011). Push and swap: Fast co-
operative path-finding with completeness guarantees.
In IJCAI, volume 11, pages 294–300.
Selman, B., Kautz, H., et al. (1993). Domain-independent
extensions to gsat: Solving large structured satisfiabil-
ity problems. In IJCAI, volume 93, pages 290–295.
Selsam, D., Lamm, M., B
¨
unz, B., Liang, P., de Moura,
L., and Dill, D. L. (2018). Learning a sat
solver from single-bit supervision. arXiv preprint
arXiv:1802.03685.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-based search for optimal multi-agent
pathfinding. Artificial intelligence, 219:40–66.
Sharon, G., Stern, R., Goldenberg, M., and Felner, A.
(2013). The increasing cost tree search for opti-
mal multi-agent pathfinding. Artificial intelligence,
195:470–495.
Silver, D. (2005). Cooperative pathfinding. In Proceedings
of the aaai conference on artificial intelligence and in-
teractive digital entertainment, volume 1, pages 117–
122.
Srinivasan, A., Ham, T., Malik, S., and Brayton, R. K.
(1990). Algorithms for discrete function manipu-
lation. In 1990 IEEE international conference on
computer-aided design, pages 92–93. IEEE Computer
Society.
Standley, T. (2010). Finding optimal solutions to coopera-
tive pathfinding problems. In Proceedings of the AAAI
conference on artificial intelligence, volume 24, pages
173–178.
Standley, T. and Korf, R. (2011). Complete algorithms for
cooperative pathfinding problems. In IJCAI, pages
668–673. Citeseer.
Stern, R., Sturtevant, N., Felner, A., Koenig, S., Ma, H.,
Walker, T., Li, J., Atzmon, D., Cohen, L., Kumar, T.,
et al. (2019). Multi-agent pathfinding: Definitions,
variants, and benchmarks. In Proceedings of the In-
ternational Symposium on Combinatorial Search, vol-
ume 10, pages 151–158.
Surynek, P. (2010). An optimization variant of multi-robot
path planning is intractable. In Proceedings of the
AAAI conference on artificial intelligence, volume 24,
pages 1261–1263.
Surynek, P. (2014). Compact representations of coopera-
tive path-finding as sat based on matchings in bipartite
graphs. In 2014 IEEE 26th International Conference
on Tools with Artificial Intelligence, pages 875–882.
IEEE.
Surynek, P. (2016). Makespan optimal solving of coopera-
tive path-finding via reductions to propositional satis-
fiability. arXiv preprint arXiv:1610.05452.
Surynek, P. (2019a). Conflict handling framework in gen-
eralized multi-agent path finding: Advantages and
shortcomings of satisfiability modulo approach. In
ICAART (2), pages 192–203.
Surynek, P. (2019b). Multi-agent path finding with continu-
ous time viewed through satisfiability modulo theories
(smt). arXiv preprint arXiv:1903.09820.
Surynek, P., Felner, A., Stern, R., and Boyarski, E. (2016).
Efficient sat approach to multi-agent path finding un-
der the sum of costs objective. In Proceedings of the
twenty-second european conference on artificial intel-
ligence, pages 810–818.
Surynek, P., Kumar, T. S., and Koenig, S. (2019). Multi-
agent path finding with capacity constraints. In AI* IA
2019–Advances in Artificial Intelligence: XVIIIth In-
ternational Conference of the Italian Association for
Artificial Intelligence, Rende, Italy, November 19–22,
2019, Proceedings 18, pages 235–249. Springer.
Wagner, G. and Choset, H. (2015). Subdimensional expan-
sion for multirobot path planning. Artificial intelli-
gence, 219:1–24.
Wang, K.-H. C., Botea, A., et al. (2008). Fast and memory-
efficient multi-agent pathfinding. In ICAPS, volume 8,
pages 380–387.
Yu, J. and LaValle, S. (2013a). Structure and intractabil-
ity of optimal multi-robot path planning on graphs. In
Proceedings of the AAAI Conference on Artificial In-
telligence, volume 27, pages 1443–1449.
Yu, J. and LaValle, S. M. (2013b). Multi-agent path plan-
ning and network flow. In Algorithmic Foundations of
Robotics X: Proceedings of the Tenth Workshop on the
Algorithmic Foundations of Robotics, pages 157–173.
Springer.
Zhang, W., Sun, Z., Zhu, Q., Li, G., Cai, S., Xiong,
Y., and Zhang, L. (2020). Nlocalsat: Boosting lo-
cal search with solution prediction. arXiv preprint
arXiv:2001.09398.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
78
