
BVE + EKF: A Viewpoint Estimator for the Estimation of the Object’s
Position in the 3D Task Space Using Extended Kalman Filters
Sandro Costa Magalhães
1,2 a
, António Paulo Moreira
1,2 b
, Filipe Neves dos Santos
1 c
and Jorge Dias
3,4 d
1
INESC TEC, Porto, Portugal
2
FEUP, Porto, Portugal
3
ISR, University of Coimbra, Coimbra, Portugal
4
KUCARS, Khalifa University, Abu Dhabi, U.A.E.
Keywords:
Viewpoint Selection, 3D Position Estimation, Pose Estimation, Statistics, Kalman Filter, Active Perception,
Active Sensing.
Abstract:
RGB-D sensors face multiple challenges operating under open-field environments because of their sensitivity
to external perturbations such as radiation or rain. Multiple works are approaching the challenge of perceiving
the three-dimensional (3D) position of objects using monocular cameras. However, most of these works focus
mainly on deep learning-based solutions, which are complex, data-driven, and difficult to predict. So, we
aim to approach the problem of predicting the three-dimensional (3D) objects’ position using a Gaussian
viewpoint estimator named best viewpoint estimator (BVE), powered by an extended Kalman filter (EKF).
The algorithm proved efficient on the tasks and reached a maximum average Euclidean error of about 32 mm.
The experiments were deployed and evaluated in MATLAB using artificial Gaussian noise. Future work aims
to implement the system in a robotic system.
1 INTRODUCTION
Agriculture is a critical sector that has been facing
several difficulties over time. That constraints are
well-designed by several organizations, such as the
United Nations (UN) in the objectives for sustain-
able development (ODS) (General Assembly, 2015).
However, their solution is still a challenge.
The increased food demand promoted by the pop-
ulation growth (FAO, 2023) and labor shortage re-
quire improved and efficient agricultural technologies
that may speed up the execution of farming tasks.
Monitoring and harvesting are some tasks that may
benefit from robotization in the area.
Autonomous robots require robust perception sys-
tems to detect and identify fruits and other agricul-
tural objects. Several works use RGB-D
1
cameras to
see the objects and infer their three-dimensional (3D)
a
https://orcid.org/0000-0002-3095-197X
b
https://orcid.org/0000-0001-8573-3147
c
https://orcid.org/0000-0002-8486-6113
d
https://orcid.org/0000-0002-2725-8867
1
Red, green, blue and depth sensor
position (Kumar and Mohan, 2022; Magalhães et al.,
2022). However, RGB-D sensor can malfunction un-
der open-field environments due to external interfer-
ences (Kumar and Mohan, 2022; Gené-Mola et al.,
2020; Ringdahl et al., 2019), such as radiation or rain.
To overcome this challenge, several works designed
solutions to infer the position of the objects from
monocular sensors. The most common systems are
based on deep learning to infer the six-dimensional
(6D) or 3D pose of objects (Li et al., 2023; Parisotto
et al., 2023; Chang et al., 2021; Wang et al., 2021)
or estimate their depth (Ma et al., 2019; Birkl et al.,
2023). Deep learning deploys, although complex, al-
gorithms that are very data-dependent, usually super-
vised, and hard to predict and modify.
Despite the tendency for deep-learning solutions,
we still can use Bayesian algorithms to infer the 3D
position of objects. In previous work, (Magalhães
et al., 2024) designed the MonoVisual3DFilter to es-
timate the position of objects using histogram filters.
However, the algorithm still requires the manual def-
inition of viewpoints to estimate the position of the
fruits.
Magalhães, S. C., Moreira, A. P., Santos, F. N. and Dias, J.
BVE + EKF: A Viewpoint Estimator for the Estimation of the Object’s Position in the 3D Task Space Using Extended Kalman Filters.
DOI: 10.5220/0012945800003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 157-165
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
157
Therefore, in this work, we challenge to identify a
mechanism that can autonomously infer the 3D posi-
tion of fruits without the demand for manually defin-
ing viewpoints.
We approach our question with the challenge of
autonomously identifying the position of fruits, such
as tomatoes, in the tomato plant for precision moni-
toring or harvesting tasks. We assume the system has
a manipulator with a monocular camera configured in
an eye-hand manner.
In the following sections, this article explores the
proposed solution. The section 2 details the im-
plementation of the best viewpoint estimator (BVE)
powered by the extended Kalman filter (EKF) to esti-
mate the 3D position of the objects in the tasks space.
This section also defines some experiments to evalu-
ate the algorithm. The section 3 illustrates the results
for the various experiments and some algorithm limi-
tations. Finally, section 4 concludes and summarizes
this study and introduces future work.
2 MATERIALS AND METHODS
2.1 BVE
A statistical optimization approach guides towards a
solution for this problem. The observation of a fruit
from a viewpoint has an associated observation error.
The goal is to identify a subsequent viewpoint that
minimizes this error. Thus, the problem is the mini-
mization of a loss function related to the intersection
of Gaussians distributions (1), where N
i
(µ
i
,Σ
i
) de-
notes a Gaussian distribution. The index i ∈N corre-
sponds to each observation viewpoint.
N(µ
p
,Σ
p
) = N
1
(µ,Σ
1
) ·. . . ·N
n
(µ,Σ
n
) (1)
The Gaussian distribution’s product (1) presents
significant computational complexity. Nevertheless,
(Petersen and Pedersen, 2012) posits that we can de-
compose the product of Gaussians into two distinct
equations—addressing the mean values and the co-
variance. Because we expect the fruit to remain
stopped while hung on the tree, this solution proposes
that the position of the tomato, k , remains invariant,
thus µ
i
= k . Hence, we simplify the optimization
problem to (2).
Σ
p
= (Σ
1
−1
+ ... + Σ
n
−1
)
−1
(2)
The observation noise covariance is predomi-
nantly a characteristic intrinsic to the camera. Con-
sequently, the camera’s covariance Σ
c
remains con-
stant within the camera’s frame, C. The movement of
the camera to different poses, c , changes the observa-
tion noise in the fixed world frame W . So, the model
requires an observation covariance matrix expressed
within the main frame W (3) to correlate the multi-
ple observations. The matrix R
W
C
represents a rota-
tion matrix that delineates the relationship between
the camera’s frame C and the main frame W .
Σ
n
= R
W
C
Σ
c
R
W
C
⊺
(3)
In concluding the initial problem definition, we
should recognize that the covariance matrix under-
goes modification with each iteration of the algorithm
as a consequence of the computations performed in
equations (2) and (3). To generalize the system’s ini-
tial conditions, a generic covariance matrix, Σ
o
, is
considered. This matrix represents the culmination of
all previous intersections of covariance matrices up to
the point k −1.
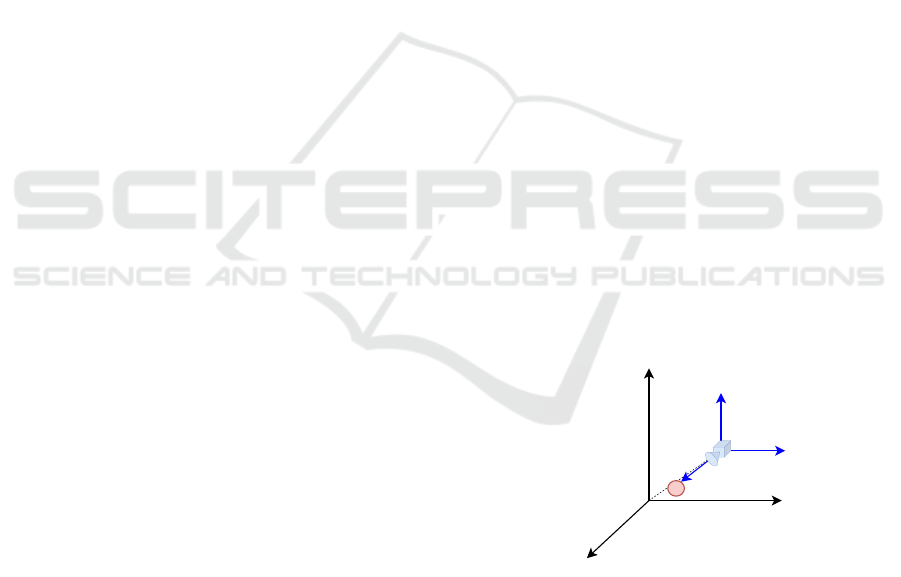
2.1.1 Definition of the Rotation Matrix
The observation covariance matrix Σ
c
is initially de-
fined into the camera’s frame. We can convert data
between frames using homogeneous transformations,
namely rotation matrices, because the translation is
irrelevant. Figure 1 illustrates a possible generic re-
lationship between frames. The camera’s frame, de-
noted as Ox
C
y
C
z
C
, is centered at the sensor, and the
x
C
axis indicates the camera’s viewing direction. For
simplicity, we assume that y
C
is always parallel to the
plane defined by
x
W
O
y
W
. This simplification is possi-
ble because the covariance matrix is ideally symmet-
rical in the x
C
axis, and the other axis’s orientation is
irrelevant.
Y
W
Z
W
X
W
X
C
Y
C
Z
C
X
T
Figure 1: Definition of the camera’s frame and the main
frame.
Given the fruit position’s estimation in the main
frame,
ˆ
k , e
x
W
C
denotes the unit vector of x
C
axis (4),
where c is the camera’s position. We can define the
camera frame’s axes in the main frame through (5),
(6), and (7). The rotation matrix R
W
C
that relates the
camera frame to the main frame is obtained from (8).
In (8), e
x
W
C
, e
y
W
C
, and e
z
W
C
are the unit vector of x
W
C
,
y
W
C
, and z
W
C
, respectively.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
158

e
x
W
c
=
ˆ
k −c
||
ˆ
k −c ||
(4)
x
W
C
=e
x
W
c
=
x
1
x
2
x
3
⊺
(5)
y
W
C
=
−x
2
x
1
0
⊺
(6)
z
W
C
=x
W
C
×y
W
C
(7)
R
W
C
=
h
e
x
W
C
e
y
W
C
e
z
W
C
i
(8)
2.1.2 Definition of the Objective Function
We aim to minimize a function related to the product
of Gaussian distributions (2). This endeavor requires
a loss function directly contingent upon the Gaussian
intersection. The optimizer predicates a scalar output
from the loss function we designed as a dispersion
dependency.
For each observation, (9) characterizes the inter-
section of two covariance matrices in a fixed main
frame. The computation of this intersection necessi-
tates the calculation of three inverse matrices, which
is a computationally demanding operation.
Σ
u
= (Σ
o
−1
+ Σ
n
−1
)
−1
(9)
We reduced the number of these operations
through the precision matrix (P = Σ
u
−1
). Then, the
precision’s concentration (c = det((P))) translates the
matrix into a scalar. So, we can define the objec-
tive function as the dispersion (
1
/c), because, accord-
ing to the properties of the determinants, det(P
−1
) =
det(P )
−1
. Due to the low magnitude of the loss func-
tion, we scaled the dispersion into the logarithmic
scale (10). P and Σ
n
are dependent on
ˆ
c , the next
estimated position of the camera, which we aim to
optimize.
f (
ˆ
c ) = −ln(det(Σ
n
−1
+ Σ
o
−1
)) (10)
Alternatively to the loss function 10, we can min-
imize the absolute maximum eigen value of the co-
variance matrix if we have enough computing power
to compute (9). While using this loss function, we
should remember that it is highly non-linear and
whose derivative function varies at each step because
of the maximum function.
f (
ˆ
c ) = max(|eig(Σ
u
)|) (11)
We can use optimization algorithms operating
with non-linear restrictions and loss functions to solve
the problem using both functions. For the current
analysis, we opted to use an interior-point algorithm
(Nocedal et al., 2014), already implemented in MAT-
LAB’s optimization toolbox(The MathWorks, Inc.,
2024).
We also intend to effectively drive the camera to
the objects to perform tasks, while estimating the po-
sition of the fruit. Towards that, we added an ad-
ditional component to the loss function (13). The
act(i,a,b) is a sigmoid activation function (12). The
sigmoid activates the additional component, forcing
the camera to approximate the object. In the activa-
tion function (12), a and b are control parameters that
set its aggressiveness and its set point (i.e., the value
of the function for act(·) = 0.5), respectively; i is the
iteration number of the procedure. Through this strat-
egy, we can activate gradually the Euclidean error to
the fruit according to the evolution of the estimation
procedure.
act(i,a,b) =
1
1 + e
−a·(i−c)
(12)
F(
ˆ
c ) = f (
ˆ
c ) + act(i,a,b) ·||
ˆ
k −
ˆ
c || (13)
2.1.3 Definition of the Restrictions
The proposed algorithm can effectively estimate the
best camera poses that maximize the observability of
the fruits. However, some restrictions should be im-
plemented to match the environment and hardware
constraints. So, we defined that the selected poses
must be inside the working space of a 6 DoF
2
ma-
nipulator. A spheric model simplifies this workability
restriction. Considering a manipulator with a working
space centered in m and with a radius r
m
, in meters,
the camera’s pose
ˆ
c must be inside (14). We only es-
timate the center position of the fruit but mislead its
volume. An additional condition forces the camera to
be outside the fruit space. Thus, considering an aver-
age fruit radius r
k
, centered in k , the camera’s pose
has to comply with (15).
(
ˆ
c −m) ·(
ˆ
c −m)
⊺
−r
2
m
≤ 0 (14)
−(
ˆ
c −
ˆ
k ) ·(
ˆ
c −
ˆ
k )
⊺
+ r
2
k
≤ 0 (15)
The camera’s orientation is also relevant to ensure
it looks towards the fruit. The algorithm only focuses
in estimating the best position for the camera, but also
the orientation of it should be constrained, ensuring
the camera is looking towards the fruits. The camera
has a conical vision profile. So, we constrained the
fruits to be inside the camera’s field of view, with a
conical shape, (19) and figure 2, where HFOV is the
angle of the horizontal field of view of the camera in
radians.
e
c
=
ˆ
k −
ˆ
c
||
ˆ
k −
ˆ
c ||
(16)
2
Degrees of freedom
BVE + EKF: A Viewpoint Estimator for the Estimation of the Object’s Position in the 3D Task Space Using Extended Kalman Filters
159

e
c
⊥
=
−e
c,2
e
c,1
e
c,3
⊺
(17)
x
lim
=
ˆ
k + r
k
·e
c
⊥
(18)
0 ≥
x
lim
−
ˆ
c
||x
lim
−
ˆ
c ||
·e
c
−cos
HFOV
2
(19)
Figure 2: Restriction—fruit inside the camera’s field of
view.
In a tomato greenhouse, where plants are aligned
in rows, the robot must avoid crossing these rows to
prevent damage. These rows make a wall of uncross-
able tomato plants. Avoiding crossing the designed
walls is managed by defining a restriction (22), mod-
elling the plant rows as a planar boundary to keep the
robot on one side, set at a distance d meters from the
fruit, as illustrated in the figure 3. The plane’s orien-
tation is determined by the normal unit vector e
n
plane
,
which represents the normal vector n
plane
.
n
plane
=
ˆ
k
0
ˆ
k
1
0
⊺
(20)
w =
ˆ
k −d ·e
n
plane
(21)
0 ≥e
n
plane
·(
ˆ
c −w ) (22)
trees
plane
Figure 3: Restriction—camera cannot cross the fruits’ trees.
In addition to the previous restrictions, we de-
signed extra ones based on the manipulator’s spe-
cific features. These ensure that only valid poses are
selected, making the kinematics computable, which
varies with the manipulator’s kinematics.
The previously designed constraints are very spe-
cific and complex for the designed target. Conduct-
ing essays with simplified algorithms should be ad-
vantageous in understanding the benefits and the lim-
itations of a more complete scene design. So, we
also conducted experiments with simplified restric-
tions, considering just one: the distance between the
camera and the fruit, denoted as l
dist
in (23).
l
dist
−ε < ||
ˆ
c −
ˆ
k || < l
dist
+ ε (23)
2.2 Fruit Pose Estimation Using the
EKF
The BVE computes the best observability viewpoints
but does not estimate the 3D position of the objects.
Based on an initial rough estimation of the position of
the fruit, the EKF can provide iterative refinement of
the objects’ position.
To ensure a good correct operation of the EKF,
the camera should move smoothly while looking at
the fruit to correct the fruit position estimation itera-
tively. So, an additional restriction is implemented to
the BVE to ensure that the camera moves to the next
best viewpoint in a radius of r
d
meters, (24).
||
ˆ
c
k +1
−c
k
||−r
d
< 0 (24)
The EKF is divided into two main steps: the pre-
diction phase and the correction phase. The fruit po-
sition is continuously estimated during prediction, at-
tending dynamics and predictive movement. At the
correction phase, the fruit is observed by a dedicated
sensor, and so its position is corrected according to
the measurements performed.
Prediction. During the prediction phase, we esti-
mate the fruit’s position, attending to its zero dynam-
ics. The EKF should expect the fruit to not move. So,
the predicted position of the fruit is the same as the
previous one (25). Besides, the EKF also has to prop-
agate the covariance estimation error (26).
ˆ
x
k |k −1
= f (
ˆ
x
k −1|k −1
,u
k −1
) = I ·
ˆ
x
k −1
(25)
P
k |k −1
=F
k
·P
k |k −1
·F
⊺
k
+Q
k
= P
k |k −1
+Q
k
(26)
F
k
=
∂ f
∂ x
ˆ
x
k −1|k−1
,u
k
= 1 (27)
Correction. Assuming that the camera always ob-
serves the fruit, the EKF always has a correction
phase after a prediction phase. During this phase,
the EKF corrects the estimation of the fruit’s position
(35), acknowledging the measures obtained from the
camera to the sensor (28). The EKF uses the same
rough initial estimation method based on the fruit’s
average size and the camera’s distortion. The cor-
rection phase also corrects the covariance propagation
error (33). In these equations,
ˆ
x is the estimated po-
sition of the fruit for each instance, and ε is a random
noise variable added to create noise for the simulated
environment (under real conditions, this value is real-
istically measured and should be ignored).
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
160

h(
ˆ
x
k |k −1
) =||
ˆ
x
k −1
−c || (28)
z
k
=||k −c ||+ ε ·
√
σ
xx
(29)
H
k
=∇h(
ˆ
x
k |k −1
) =
ˆ
x
k −1
−c
||
ˆ
x
k −1
−c ||
(30)
K
k
=P
k |k −1
·H
k
⊺
·(H
k
·P
k |k −1
·H
k
⊺
+ R
k
)
−1
(31)
R
k
=σ
xx
(32)
P
k |k
=(I −K
k
·H
k
) ·P
k |k −1
(33)
˜
y
k
=z
k
−h(
ˆ
x
k |k −1
) (34)
ˆ
x
k |k
=
ˆ
x
k |k −1
+ K
k
·
˜
y
k
(35)
2.3 Experiments
Multiple essays were made under a simulation context
in MATLAB to validate the designed algorithms. We
deployed an iterative protocol that adds restrictions to
the optimizer. That helps to understand the limitations
with the increase of the optimization difficulties. Bel-
low, we systematize the different experiments and the
restrictions considered for each one. Mind that in all
cases, the BVE always considers the restriction (24)
in r
d
of 0.2 m. The EKF uses a near-realistic covari-
ance matrix for the camera’s observations of the fruit,
corresponding to a diagonal matrix and a bigger ob-
servation variance in the xx axis.
E1. For this experiment, we used the loss function
(10) and restricted the BVE’s behavior with lim-
ited the position of the camera l
dist
of (1.0 ±
0.1) m to the fruit, (23).
E2. In this experiment, we repeated the previ-
ous essay, but we also considered the restric-
tion (14) that assures that the camera is in-
side the manipulator’s working space, consider-
ing the Robotis Manipulator-H with its center m
in
0 0 0.159
⊺
m and a maximum range r
m
of
0.645 m.
E3. In this experiment, we consider the loss function
(10) and the restrictions (14), (15) with the aver-
age tomato size r
k
, and (19).
E4 This experiment considers the restrictions and the
loss function of E3 and adds the restriction (22),
considering d = 0.1 m;
E5. This experiment repeats the previous experiment,
adding the kinematics constraints, ensuring that
the camera’s pose is always a valid pose for the
manipulator;
E6. Repeats the experiment E1, considering the loss
function (11), based on the minimization of the
maximum covariance, instead of the dispersion-
based loss function (10);
E7. Repeats the experiment E2, considering the loss
function (11);
E8. Repeats the experiment E3, considering the loss
function (11);
E9. Repeats the experiment E4, considering the loss
function (11); and
E10. Repeats the experiment E5, considering the loss
function (11).
We executed the simulation code for 100 runs for
each of these experiments. In each run, we consider
a random position for the tomato k , k
i
∈ [−1,1] m,
and a random initial position for the camera c ,c
i
∈
[−2,2] m. The initial estimation of the fruit was ini-
tialized in its real position k added by a random bias
between [−0.15;0.15] m for each axis.
We assessed the algorithm’s performance using
the mean absolute percentage error (MAPE) (36),
mean absolute error (MAE) (37), root mean square er-
ror (RMSE) (39), and mean square error (MSE) (38).
MAPE (µ
j
,
ˆ
µ
j
) =
1
N ·M
N
∑
i
M
∑
j
µ
i j
−
ˆ
µ
i j
µ
i j
×100
∀j ∈ N : {1..M} (36)
MAE (µ
j
,
ˆ
µ
j
) =
1
N ·M
N
∑
i
M
∑
j
|µ
i j
−
ˆ
µ
i j
|
∀j ∈ N : {1..M} (37)
MSE (µ
j
,
ˆ
µ
j
) =
1
N ·M
N
∑
i
M
∑
j
(µ
i j
−
ˆ
µ
i j
)
2
∀j ∈ N : {1..M} (38)
RMSE (µ
j
,
ˆ
µ
j
) =
v
u
u
t
1
N ·M
N
∑
i
M
∑
j
(µ
i j
−
ˆ
µ
i j
)
2
∀j ∈ N : {1..M} (39)
3 RESULTS AND DISCUSSION
The BVE powered with EKF can effectively estimate
the fruits’ position while using a monocular camera.
We organized ten experiments, as described in the
section 2.3. Table 1 reports the average errors for
the different experiments. Figure 4 illustrates sam-
ple paths produced by the optimizer for experiments
E2, E5, E7, and E10.
Analyzing the table 1, we verify that simpler and
more flexible restrictions result in smaller estimation
errors. However, discarding E1, all the experiments
conducted in similar estimation errors with an Eu-
clidean error of about 30 mm, if considering the loss
BVE + EKF: A Viewpoint Estimator for the Estimation of the Object’s Position in the 3D Task Space Using Extended Kalman Filters
161
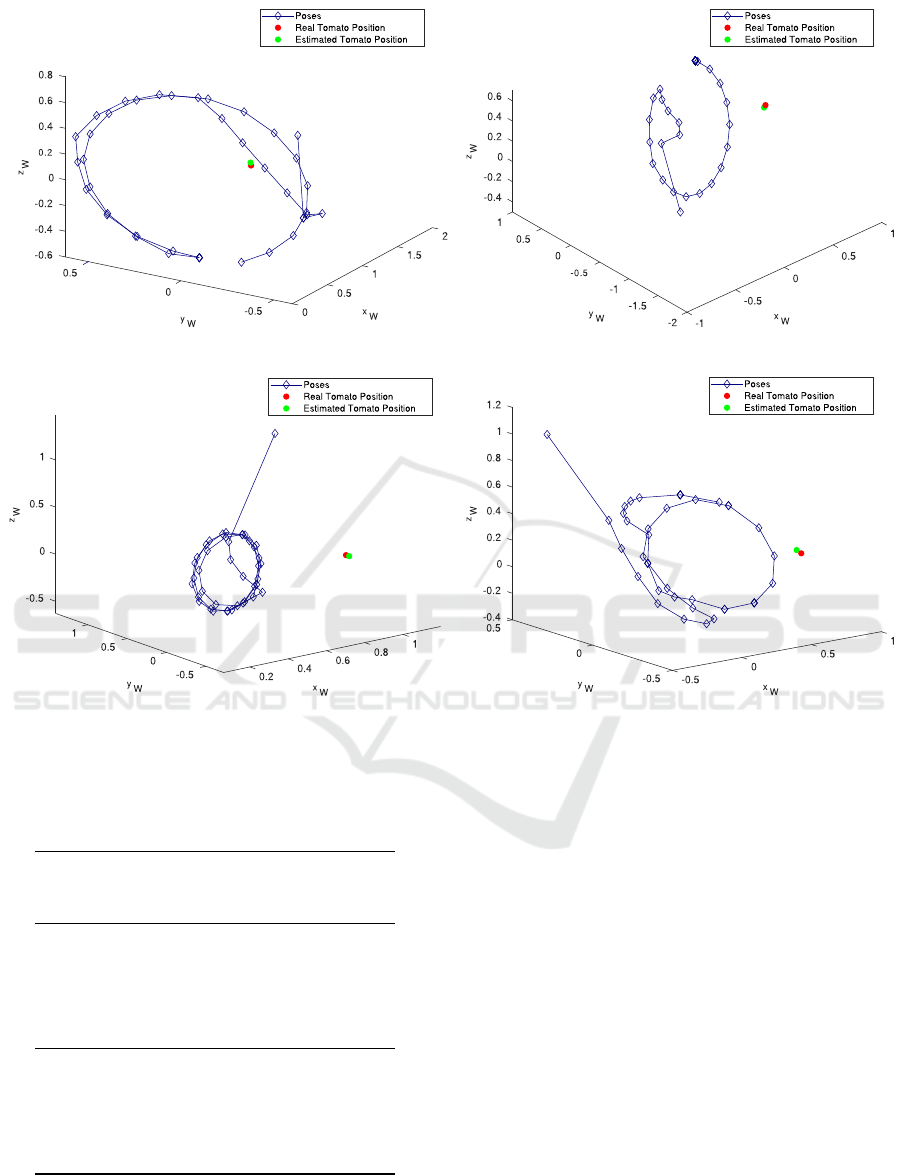
(a) E2 (b) E7
(c) E5 (d) E10
Figure 4: Sample paths generated by the different experiments to assess the fruit’s position. Light blue – poses; red – real
fruit position; green – estimated fruit position.
Table 1: Error computations to the centre estimation using
the BVE and the EKF.
MAPE
(%)
MAE
(mm)
RMSE
(mm)
MSE
(mm)
2
E1 5.12 37.1 15.5 241.64
E2 12.86 52.5 25.5 650.47
E3 8.64 53.8 28.1 790.79
E4 11.65 57.2 29.1 848.40
E5 10.62 60.9 31.2 971.44
E6 32.38 53.5 26.3 689.63
E7 14.79 53.1 24.7 612.17
E8 12.62 48.0 21.2 447.57
E9 10.44 53.0 23.4 548.17
E10 20.06 62.3 31.3 982.65
function (10). Despite constraining, the BVE + EKF
can perform similarly while increasing the constrain-
ing difficulty. Differently, the loss function 11 has a
more progressive behavior, having better results than
(10) for less constraining restrictions.
In a general evaluation, we can conclude that us-
ing a differentiable loss function (experiments E1 to
E5) such as the dispersion (10) brings advantages over
a none differentiable loss function (experiments E6
to E10) such as (11), which depends on a maximum
operation. Besides, empirical analysis of the perfor-
mance of both loss functions under the same condi-
tions concludes that the dispersion loss function was
also faster to compute because it has one less inver-
sion matrix to calculate. Simpler and less restrictive
conditions deliver lower errors while estimating the
position of the fruits once the camera has more free-
dom to navigate around the region of interest. In both
strategies, the BVE tends to plan an approximated cir-
cular path in the case where the algorithm is free to
design its path to the most restricted cases (Figures
4). These circular paths do not always happen in the
same plan but in various plans, even transversal ones.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
162
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Initial deviation error to real position (m)
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Error
RMSE
MSE
MAE
(a) E1
0 0.1 0.2 0.3 0.4 0.5
Initial deviation error to real position (m)
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Error
RMSE
MSE
MAE
(b) E6
0 0.1 0.2 0.3 0.4 0.5
Initial deviation error to real position (m)
0
0.05
0.1
0.15
0.2
0.25
Error
RMSE
MSE
MAE
(c) E5
0 0.1 0.2 0.3 0.4 0.5 0.6
Initial deviation error to real position (m)
0
0.05
0.1
0.15
0.2
0.25
Error
RMSE
MSE
MAE
(d) E10
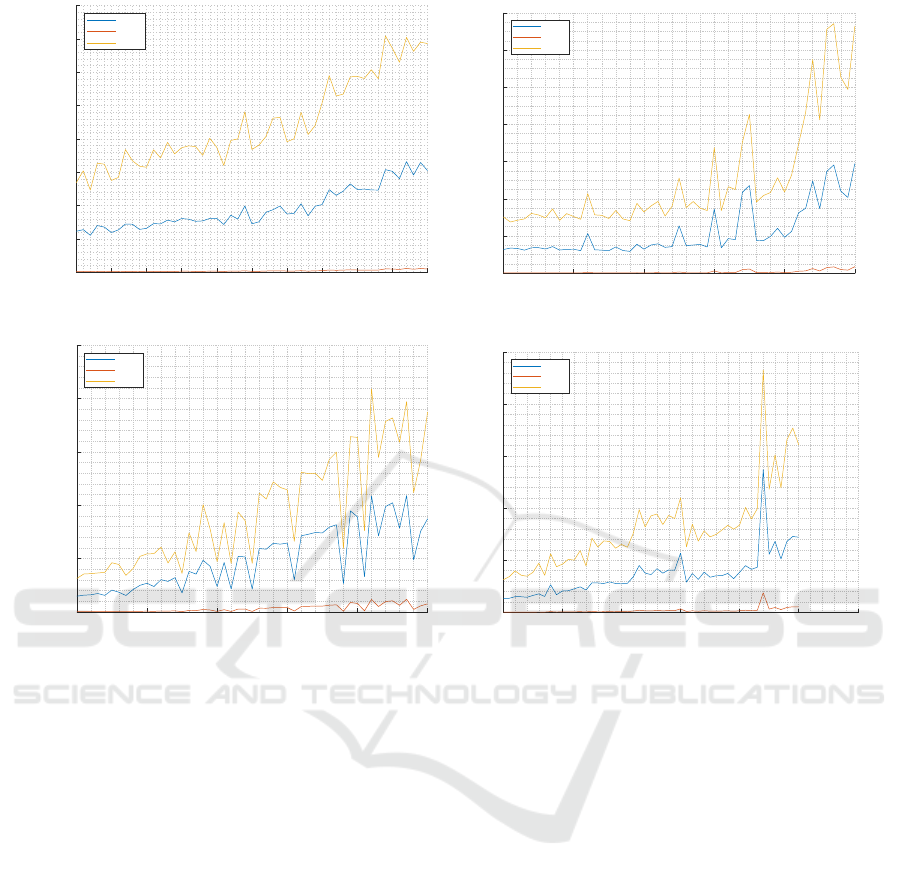
Figure 5: Average error for the recoverability of the loss functions for the BVE + EKF considering different initial estimation
errors. Blue – RMSE; red – MSE; yellow – MAE.
For some applications, such as precise and care-
ful fruit picking with cutting tools, the reported esti-
mation errors may not be small enough. To improve
the error, the system should apply strategies and algo-
rithms that reduce the covariance. Freer systems also
prove to have smaller errors because of the liberty of
the algorithm to choose the best observation positions.
Besides, implementing historical knowledge should
optimize innovation and promote the acquisition of
new scene perspectives.
The previous conclusions are enough to under-
stand the performance of both models but do not allow
us to understand their limitations and recovery capac-
ity. So, we also performed a recoverability analysis
for the loss function to approximate the fruit’s posi-
tion correctly. To achieve this aim, we made multiple
essays for estimating the real position of the fruits,
considering an initial estimation error between 0 m to
0.5 m in steps of 1 cm. We considered ten simula-
tions for each initial estimation error and computed
the average result. Figure 5 illustrates the average er-
rors, given the initial conditions for experiments E1
and E5.
From these experiments, we can conclude that
both loss functions perform similarly under the most
complex and demanding restrictions. Still, the algo-
rithm can tolerate bigger initial estimation errors by
using the dispersion minimization loss function (10).
Besides, this loss function is also easier to compute,
and the next viewpoint is estimated quickly and eas-
ily.
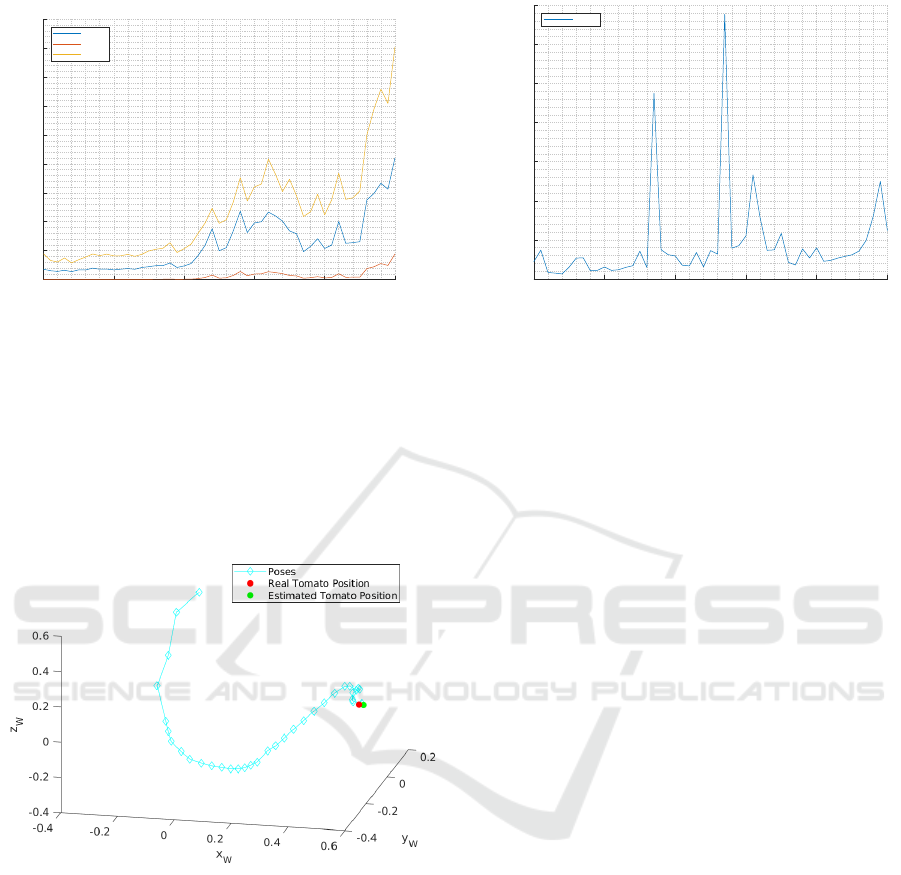
As has been observed, the algorithm is effective in
searching for the best viewpoint to estimate the posi-
tion of the fruits. However, task execution is also rel-
evant to ensure the sensory apparatus moves toward
the object. The algorithms can approximate the ob-
ject in a two-step procedure: positioning the fruit and
moving to it. However, using a properly designed loss
function such as (13), the BVE + EKF algorithms can
iteratively refine the fruit’s position while moving to-
wards it. Figure 7 illustrates a possible path to move
the sensors from the starting pose to the object, con-
BVE + EKF: A Viewpoint Estimator for the Estimation of the Object’s Position in the 3D Task Space Using Extended Kalman Filters
163
0 0.1 0.2 0.3 0.4 0.5
Initial deviation error to real position (m)
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Error
RMSE
MSE
MAE
(a) Error
0 0.1 0.2 0.3 0.4 0.5
Initial deviation error to real position (m)
0
50
100
150
200
250
300
350
Error (%)
MAPE
(b) MAPE
Figure 6: Average Error and MAPE for the recoverability of the loss functions for the BVE + EKF considering different initial
estimation errors for the loss function (13) and the restrictions such as in E5. On left (blue – RMSE; red – MSE; yellow –
MAE); On Right (blue – MAPE).
sidering the restrictions E5. This scheme shows that
the algorithm tends to have a circular path while cor-
recting the fruit’s position.
Figure 7: Sensor approximation’s path using the loss func-
tion (13) and the restrictions such as in E5. Light blue –
poses; red – real fruit position; green – estimated fruit posi-
tion.
Similar to the previous examples, we also per-
formed a recoverability analysis of the algorithm run-
ning the loss function (13). The behavioral results are
illustrated in figure 6 plots. The algorithm tends to
perform worse and accumulate more errors for this
function. Here, we can rely on an initial estimation
error until about 15 cm. Initial estimation errors big-
ger than that will result in a final significant estimation
error.
4 CONCLUSIONS
The robotization of agricultural fields is an approach
that can help to overcome some current societal chal-
lenges, such as labor shortages in the field or im-
proved crops. However, that requires the implementa-
tion of robust 3D or 6D perception systems indepen-
dent of depth sensors because of their sensibility to
external perturbances.
To approach the problem, we studied a Gaussian-
based solution to minimize the observation covari-
ance over the fruits, which we called BVE. We pow-
ered the BVE with an EKF that iteratively approxi-
mates the position of the fruits. The essay was de-
ployed and tested in mathematical simulation over
MATLAB. We designed two loss functions to opti-
mize the resulting observability error: a covariance
dispersion-based function and the maximum variance
of the covariance matrix. The system reached reason-
able results with average Euclidean errors lower than
31.2 mm. A more distinctive analysis concludes that
the maximum covariance function is more sensitive to
restrictions, so a lower error with fewer constraining
restrictions. On the other hand, the dispersion-based
function is empirically faster to compute and more ro-
bust.
Additional evaluations were conducted to assess
the algorithm’s robustness to different initial condi-
tions, which show that both loss functions perform
similarly. A variant loss function that drives the sen-
sor to the object proves the robot can perform both
tasks simultaneously.
Future work should focus on developing the sys-
tem in a robotic system under controlled environ-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
164

ments. Besides using EKF, other equivalent algo-
rithms may be tested, such as the Unscented Kalman
Filter (UKF). Additional improvements may also be
studied, such as implementing historical knowledge
that promotes the selection of newer innovative poses.
ACKNOWLEDGEMENTS
This work is financed by National Funds through
the FCT – Fundação para a Ciência e a Tec-
nologia, I.P. (Portuguese Foundation for Science
and Technology) within the project OmicBots,
with reference PTDC/ASP-HOR/1338/2021
(DOI:10.54499/PTDC/ASP-HOR/1338/2021).
Sandro Costa Magalhães is granted by the Por-
tuguese Foundation for Science and Technology
(FCT) through the ESF integrated into NORTE2020,
under scholarship agreement SFRH/BD/147117/2019
(DOI:10.54499/SFRH/BD/147117/2019).
REFERENCES
Birkl, R., Wofk, D., and Müller, M. (2023). MiDaS v3.1 –
a model zoo for robust monocular relative depth esti-
mation.
Chang, J., Kim, M., Kang, S., Han, H., Hong, S., Jang,
K., and Kang, S. (2021). GhostPose: Multi-view Pose
Estimation of Transparent Objects for Robot Hand
Grasping. In 2021 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS). IEEE.
FAO (2023). FAOSTAT Statistical Database. 2024-05-21.
General Assembly (2015). Transforming our world: the
2030 Agenda for sustainable development. Resolution
A/RES/70/1.
Gené-Mola, J., Llorens, J., Rosell-Polo, J. R., Gregorio, E.,
Arnó, J., Solanelles, F., Martínez-Casasnovas, J. A.,
and Escolà, A. (2020). Assessing the performance of
RGB-D sensors for 3D fruit crop canopy characteriza-
tion under different operating and lighting conditions.
Sensors-basel., 20(24):7072.
Kumar, M. S. and Mohan, S. (2022). Selective fruit harvest-
ing: Research, trends and developments towards fruit
detection and localization – a review. Proceedings of
the Institution of Mechanical Engineers, Part C: Jour-
nal of Mechanical Engineering Science, 237(6):1405–
1444.
Li, F., Vutukur, S. R., Yu, H., Shugurov, I., Busam,
B., Yang, S., and Ilic, S. (2023). NeRF-
Pose: A First-Reconstruct-Then-Regress Approach
for Weakly-supervised 6D Object Pose Estimation. In
2023 IEEE/CVF International Conference on Com-
puter Vision Workshops (ICCVW), pages 2115–2125.
Ma, X., Wang, Z., Li, H., Zhang, P., Ouyang, W., and
Fan, X. (2019). Accurate monocular 3D object de-
tection via color-embedded 3D reconstruction for au-
tonomous driving. In 2019 IEEE/CVF International
Conference on Computer Vision (ICCV), pages 6850–
6859, Seoul, Korea (South). IEEE.
Magalhães, S. A., Moreira, A. P., dos Santos, F. N., and
Dias, J. (2022). Active perception fruit harvesting
robots — a systematic review. Journal of Intelligent
& Robotic Systems, 105(14).
Magalhães, S. A. C., dos Santos, F. N., Moreira,
A. P., & Dias, J. M. M. (2024). MonoVi-
sual3DFilter: 3D tomatoes’ localisation with monoc-
ular cameras using histogram filters. Robotica, 1–20.
doi:10.1017/S0263574724000936
Nocedal, J., Öztoprak, F., and Waltz, R. A. (2014). An in-
terior point method for nonlinear programming with
infeasibility detection capabilities. Optim. Methods
Softw., 29(4):837–854.
Parisotto, T., Mukherjee, S., and Kasaei, H. (2023).
MORE: simultaneous multi-view 3D object recogni-
tion and pose estimation. Intelligent Service Robotics,
16(4):497–508.
Petersen, K. B. and Pedersen, M. S. (2012). The Matrix
Cookbook. Version 20121115.
Ringdahl, O., Kurtser, P., and Edan, Y. (2019). Performance
of RGB-D camera for different object types in green-
house conditions. In 2019 European Conference on
Mobile Robots (ECMR), pages 1–6, Prague, Czech Re-
public. IEEE.
The MathWorks, Inc. (2024). MATLAB 9.14.0.2206163
(R2023a).
Wang, H., Dong, L., Zhou, H., Luo, L., Lin, G., Wu, J., and
Tang, Y. (2021). YOLOv3-litchi detection method of
densely distributed litchi in large vision scenes. Math.
Probl. Eng., 2021:1–11.
BVE + EKF: A Viewpoint Estimator for the Estimation of the Object’s Position in the 3D Task Space Using Extended Kalman Filters
165
