
Augmented Feasibility Maps: A Simultaneous Approach to Redundancy
Resolution and Path Planning
Marc Fabregat-Ja
´
en
1 a
, Adri
´
an Peidr
´
o
1 b
, Esther Gonz
´
alez-Amor
´
os
1
, Mar
´
ıa Flores
1 c
and
´
Oscar Reinoso
1,2 d
1
Instituto de Investigaci
´
on en Ingenier
´
ıa de Elche, Universidad Miguel Hern
´
andez, Avda. Universidad s/n, Elche, Spain
2
ValgrAI: Valencian Graduate School and Research Network of Artificial Intelligence, Cam
´
ı de Vera s/n, Valencia, Spain
fl
Keywords:
Redundancy Resolution, Path Planning, Feasibility Maps, Redundant Manipulators, Obstacle Avoidance.
Abstract:
Redundant robotic manipulators are capable of performing complex tasks with an unprecedented level of
dexterity and precision. However, their redundancy also introduces significant computational challenges, par-
ticularly in the realms of redundancy resolution and path planning. This paper introduces a novel approach to
simultaneously address these challenges through the concept of Augmented Feasibility Maps, by integrating
task coordinates as decision variables into the traditional feasibility maps. We validate the AFM concept by us-
ing Rapidly-Exploring Random Trees to explore the maps, demonstrating its efficacy in simulations of various
dimensionalities. The method is capable of incorporating kinematic constraints, such as obstacle avoidance
while adhering to joint limits.
1 INTRODUCTION
Kinematically redundant robots have more degrees of
freedom n (DoF) than the dimension m of the primary
or main task that they must perform. For example, a
3-DoF planar manipulator that must control the posi-
tion coordinates p
x
and p
y
of its gripper in the plane
has one degree of redundancy, as it would suffice to
have 2 DoF to complete this task. Kinematic redun-
dancy increases the versatility of robotic manipulators
because the excess of r = n − m degrees of freedom
can be leveraged to satisfy secondary goals or con-
straints in addition to the main task, e.g., minimiza-
tion of torques or energy consumption, or avoidance
of singularities or obstacles, etc. (Peidro and Haug,
2023). However, this comes at the expense of a higher
computational complexity, because their inverse kine-
matic problem (IKP), i.e., the problem of computing
the joint displacements that allow the manipulator to
place its gripper at the desired position, admits in-
finitely many different solutions. Deciding which one
of these infinite solutions should be picked to com-
plete its task is the problem of redundancy resolution.
a
https://orcid.org/0009-0002-4327-0900
b
https://orcid.org/0000-0002-4565-496X
c
https://orcid.org/0000-0003-1117-0868
d
https://orcid.org/0000-0002-1065-8944
Typically, the problem of redundancy resolution is
solved for a given desired trajectory of the kinematic
variables that define the task of the robot, which we
denote by x. For a specified x(t), with 0 < t < t
g
, a
redundancy resolution algorithm should provide the
time history q(t) of all n joint displacements (or co-
ordinates) of the manipulator, considering the infini-
tude of solutions that exist for each t, as well as any
existing constraints or secondary goals. Methods to
solve this problem can be classified into velocity-
based methods and position-based.
Velocity-based methods operate with the veloc-
ity relationship between task and joint coordinates:
˙
x = J
˙
q, where J is the non-square n × m Jacobian
matrix. This velocity equation is the basis of pseu-
doinverse and optimization approaches to redundancy
resolution, which obtain
˙
q and integrate it. Pseudoin-
verse methods (Whitney, 1969) solve joint velocities
as
˙
q = J
†
˙
x plus an additional nullspace term that op-
timizes secondary goals without affecting the main
task (Kazemipour et al., 2022), where (·)
†
denotes the
Moore-Penrose pseudoinverse. Optimization meth-
ods minimize programs to find the optimal value of
˙
q, where the velocity equation
˙
x = J
˙
q is included as
an equality constraint, avoiding inversion (Zanchettin
and Rocco, 2017). The main advantage of velocity-
based methods is their simplicity and compatibility
with real time, but they usually provide only locally
166
Fabregat-Jaén, M., Peidró, A., González-Amorós, E., Flores, M. and Reinoso, Ó.
Augmented Feasibility Maps: A Simultaneous Approach to Redundancy Resolution and Path Planning.
DOI: 10.5220/0012946000003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 166-173
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

optimal trajectories, may suffer from non-holonomy
and singularities (when pseudoinverting), and may
fail to accurately satisfy constraints that, like colli-
sions, are defined better at position level than at ve-
locity level (Peidro and Haug, 2023).
These limitations are alleviated by position-based
methods, which operate directly at configuration
level. Solving redundancy at position level means
obtaining all the solution sets of the space of joint
coordinates q that yield a desired task value x.
Generically, these solution sets are manifolds called
self-motion manifolds (Burdick, 1989). By scanning
all self-motion manifolds for a given x, it is possible
to find the q
∗
that globally optimizes secondary crite-
ria, allowing for globally-optimal solutions to the re-
dundancy problem. This, however, can be a costly ap-
proach, as computing the self-motion manifolds can
be rather computationally expensive (Albu-Sch
¨
affer
and Sachtler, 2023). A similar approach is offered
by the Feasibility Maps (FMs) (Wenger et al., 1993;
Reveles et al., 2016), which represent all feasible val-
ues of a set of r redundant variables for each instant t
of the trajectory, and allow for planning trajectories in
these maps avoiding obstacles and singularities while
globally optimizing other criteria.
Independently of the taken approach, it may occur
that the desired task trajectory x(t) is unfeasible. This
happens when the solution set of the IKP becomes
empty due to singularities, joint limits or collisions,
which materialize as external boundaries or internal
barriers of the workspace of the manipulator (Peidro
et al., 2018). When this happens, the manipulator can-
not complete its task regardless of the method used.
To avoid this, in this paper we propose a method
to simultaneously solve the redundancy problem and
the path planning problem, where the latter consists
in finding a feasible task trajectory x(t) that allows
the manipulator to reach a specified goal x
g
respecting
the considered constraints. To achieve this, we begin
with the idea of FMs as in (Fabregat-Jaen et al., 2023),
which represent all feasible values of the redundant
coordinates at each instant of the trajectory, but, as a
novelty, we augment these maps by considering also
the task coordinates as decision variables whose time
evolution must also be determined.
This paper is organized as follows. First, Section
2 defines the Augmented Feasibility Maps (AFM).
Next, Section 3 presents a method based on Rapidly-
Exploring Random Trees (RRT) to explore the AFM
and connect the initial state of the robot to the desired
goal x
g
through a path that is asymptotically optimal.
Section 4 illustrates the method with one and two de-
grees of redundancy. Finally, conclusions and future
work are discussed in Section 5.
2 AUGMENTED FEASIBILITY
MAPS
Consider a manipulator whose joint configuration is
given by q = [q
1
, q
2
, . . . , q
n
]
T
, where n represents
DoF. Its forward kinematics can be expressed as a
function that maps the n-dimensional joint space to
the m-dimensional task space:
x = f(q), (1)
where x = [x
1
, x
2
, . . . , x
m
]
T
denotes the m task coordi-
nates.
In order to determine the IK, (1) should ideally
be inverted to obtain an expression for q as a func-
tion of x (i.e., q = f
−1
(x)). Nevertheless, deriving
a universal IK function is often unfeasible, even for
non-redundant manipulators (where n = m), due to
the forward kinematics function generally being non-
bijective, rendering the IK mapping multi-valued.
The concept of aspects helps interpret this phe-
nomenon. In (Borrel and Li
´
egeois, 1986), an aspect is
defined as a connected set of points in the joint space
where the Jacobian matrix remains full rank. As such,
aspects delineate subsets of the joint space wherein
the manipulator can move without encountering sin-
gularities. By definition, a transition between aspects
is marked by a singularity, at which point the Jaco-
bian matrix loses rank. For manipulators that must
pass through singularities to change posture, the IKP
yields a unique solution for each aspect. In this case,
an IK function g(·) can be defined for each aspect,
mapping each task point to a unique joint position.
Multi-valuedness is further aggravated for redun-
dant manipulators (where n > m), as there exist in-
finitely many joint configurations that can reach a
given task space point. The degree of redundancy r,
that characterizes a robot and task combination, is de-
fined as r = n − m. In this context, the use of an aug-
mented task space, which incorporates r additional
dimensions to encode the redundancy, has been pro-
posed as a means to simplify the IKP. The augmented
task space is defined as:
x
a
=
x
T
, q
T
r
T
(2)
where q
r
corresponds to the additional r-dimensional
vector that virtually removes the redundancy. The
components of q
r
must be independent of every other
component of x
a
, and can be chosen arbitrarily, but
usually correspond to a subset of joint coordinates or
a differentiable function of them.
In (P
´
amanes G et al., 2002), the authors studied
the effect that the extra dimensions of the augmented
task space had on the Jacobian matrix. Given that the
rows corresponding to q
r
induced new singularities, a
Augmented Feasibility Maps: A Simultaneous Approach to Redundancy Resolution and Path Planning
167

new set of aspects were produced, which were named
extended aspects. Therefore, depending on the selec-
tion of q
r
, the number of extended aspects and their
domain can vary.
The augmented task space allows for the definition
of a unique augmented IK function g
a
(·) that maps ev-
ery augmented-task-space point to a unique joint con-
figuration that lies in a certain extended aspect:
q = g
a
(x
a
) (3)
However, rather than a single fixed task point, the
IKP is often posed as the tracking of a task trajectory.
Such trajectory x(t) can be parameterized by an arc-
length parameter t (hereafter referred to as time for
simplicity). In this situation, the set of joint config-
urations that successfully track the trajectory can be
gathered in an (r + 1)-dimensional space, where one
of the dimensions of this space is time t, whereas the
other r dimensions are the q
r
coordinates. This con-
ceptual space is referred to as feasibility map (FM),
a term introduced in (Wenger et al., 1993). A feasi-
bility map FM is defined as the set of points in the
t, q
T
r
T
space for which the augmented IKP yields a
real solution that satisfies additional kinematic con-
straints (e.g., joint limits or obstacles), i.e.:
FM =
t
q
r
q = g
a
(x
a
), x
a
=
x(t)
q
r
, q∈Q
(4)
where Q denotes the joint-space subset that satisfies
the kinematic constraints. Note that, for a specified
task trajectory x(t), and a given choice of q
r
, there
exist as many FMs as extended aspects, and each
FM corresponds to a different augmented IK func-
tion g
a
(·) that maps the augmented task space to joint-
space points within that extended aspect.
Figure 1(a) shows an example of an FM for a 2-
DoF manipulator with a 1-dimensional task, hence re-
dundancy r = 1, resulting in a 2D map. Note that the
feasible space corresponds to the uncolored region, as
the colored regions represent subsets that do not sat-
isfy the kinematic constraints. Specifically, the red re-
gions correspond to configurations that lead to a colli-
sion with an obstacle, while the purple regions corre-
spond to configurations that yield complex solutions
for the IKP.
In particular, this example corresponds to the ma-
nipulator depicted in Figure 2, which has two joints
q = [q
1
, q
2
]
T
and a task x = p
y
, with forward kine-
matic function p
y
= sin(q
1
) + sin(q
1
+ q
2
). The task
trajectory is p
y
(t) = −6.662t
2
+ 8.162t − 1.5 with
t ∈ [0, 1], and the choice of redundant parameters is
q
r
= q
1
, hence x
a
= [p
y
, q
1
]
T
. The augmented IK
function (3) in this example is:
q =
q
1
π
2
+ σ
π
2
− arcsin(p
y
(t) − sin q
1
)
− q
1
(5)
which has two solutions (i.e., extended aspects) if an-
gles are constrained to the range [−π, π] rad, corre-
sponding to the two possible values of σ = ±1. This
yields two possible feasibility maps; Fig 1(a) shows
the one corresponding to σ = −1. The FM shown in
Fig 1(a) is obtained by sweeping plane (t, q
1
) between
ranges 0 < t < 1 and −π < q
1
< π with a given dis-
crete step, and for each point (t, q
1
), q is computed
using (5). If the computation of q yields non-real
solutions (i.e., |p
y
− sin q
1
| > 1), the corresponding
point (t, q
1
) is marked in purple. If it produces colli-
sions with the ellipse shown in Figure 2, it is marked
in red. Otherwise, it is left uncolored, indicating that
the solution is feasible, i.e., it belongs to F M .
FMs have been employed in the literature to ad-
dress the redundancy resolution problem, which in-
volves the selection of the redundant parameters q
r
that fulfill a specified task x while optimizing a cer-
tain criterion and satisfying the kinematic constraints.
For instance, a modified RRT algorithm that explores
FMs for online redundancy resolution is proposed in
(Fabregat-Jaen et al., 2023). Another example is (Fer-
rentino and Chiacchio, 2020), where the authors com-
pute every FM and employ them to globally address
the redundancy resolution problem through an ex-
haustive search across the combined maps. Nonethe-
less, these methods rely on a predefined task tra-
jectory x(t), potentially resulting in unfeasible joint-
space motions if the task trajectory is not properly de-
signed, accounting for the kinematic constraints, sin-
gularities or internal barriers of the robot’s workspace
(Peidro et al., 2018).
For example, consider the FM shown in Figure
1(a). Assuming that the initial configuration of the
manipulator corresponds to the FM point A = (t =
0, q
1
= −2), any valid trajectory that fulfills the de-
sired task x(t) should connect A with any valid point
of the vertical line t = 1, e.g., FM point B. The trajec-
tory T shown in Figure 1(a) accomplishes this (note
that T wraps around q
1
because −π can be identified
with +π). However, if we forbid angular wrapping by
setting joint limits, the only way to connect A with
any point satisfying t=1 is by traversing the narrow
corridor encircled by N. If the desired task trajectory
x(t) was slightly perturbed, it may occur that the red
and purple regions near N touch each other, eliminat-
ing the corridor and making it impossible to reach
t = 1 from A unless angular wrapping is permitted,
thus rendering the desired task trajectory x(t) unfeasi-
ble. To avoid unfeasible task trajectories, in this paper
we will only specify the desired final value for x in-
stead of specifying its trajectory x(t), and we will in-
corporate the task variables into the feasibility maps
in order to find their time history at the same time
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
168
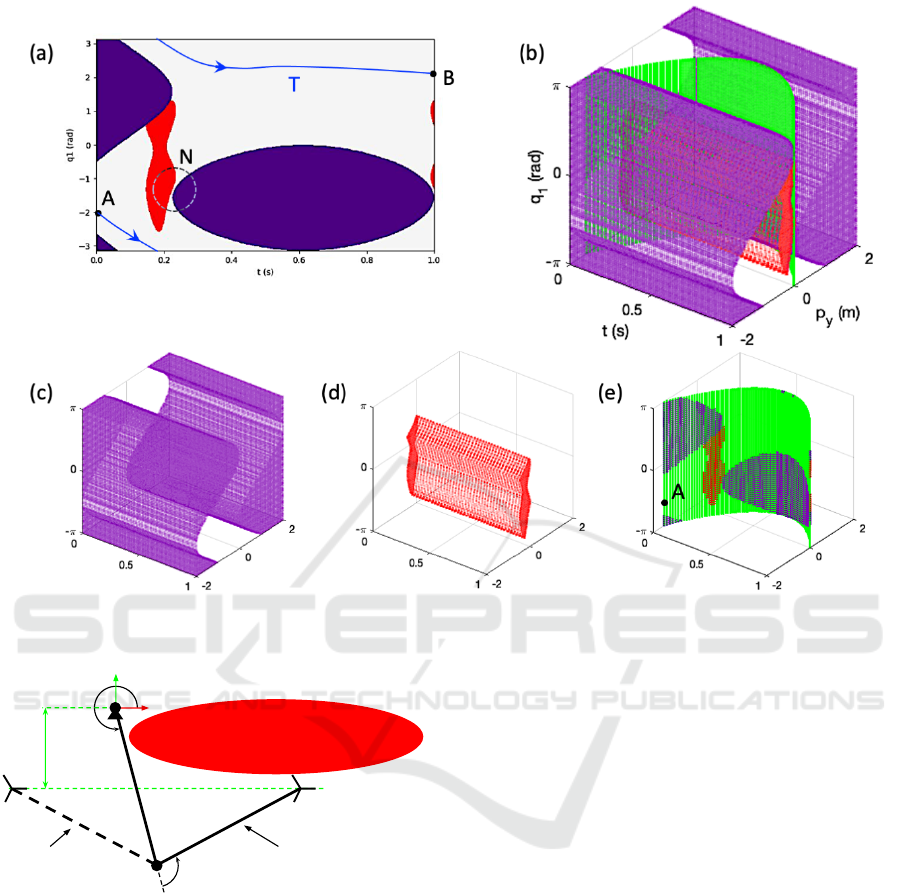
Figure 1: (a) Example of an FM for r = 1. (b) AFM that includes the task coordinate (p
y
). (c) Region of non-real solutions.
(d) Region of collisions. (e) Parabolic sheet corresponding to the task p
y
= −6.662t
2
+ 8.162t − 1.5.
y
x
p
y
q
1
q
2
σ = +1
l
1
l
2
σ = -1
Figure 2: 2-DoF manipulator with an elliptical obstacle.
that the motion of q
r
is determined, simultaneously
solving the path planning of x(t) and the redundancy
resolution.
To achieve this, we propose extending the concept
of FMs to augmented feasibility maps (AFMs), which
incorporate the task trajectory into the FM definition.
An AFM is defined as:
AFM =
t
x
a
q = g
a
(x
a
), x
a
=
x
q
r
, q∈Q
(6)
To illustrate this idea, consider the same exam-
ple of Figure 2, but instead of specifying the time
history of the task p
y
(t), we specify only its final
value p
y
(1) = 0. If p
y
can be freely varied, it can
be included as an additional dimension in the FM, re-
sulting in a 3D map (t, p
y
, q
1
) of feasible configura-
tions, shown in Figure 1b. This map includes three
objects that, for clarity, have been represented sepa-
rately in Figures 1c-e. Firstly, Figure 1c shows some
purple surfaces that enclose three-dimensional vol-
umes made of configurations that, when substituted
in (5), yield non-real solutions of q. Secondly, the
red surfaces shown in Figure 1d enclose configura-
tions for which the end-effector of the manipulator
penetrates the elliptical obstacle. Finally, the green
surface shown in Figure 1e is a parabolic sheet de-
fined parametrically as: {(t, p
y
, q
1
) | 0 < t < 1, p
y
=
−6.662t
2
+ 8.162t − 1.5, −π < q
1
< π}. This sheet
represents the task trajectory that was specified in the
previous example, and Figure 1e includes the inter-
sections between this sheet and the purple and red for-
bidden regions. In fact, the projection of this sheet on
plane (t, q
1
) yields the conventional FM depicted in
Figure 1a.
Note that, if we do not specify the task trajectory
p
y
(t), the configuration of the robot is not constrained
to move along the parabolic sheet, being able to move
freely along the three-dimensional feasible space that
is free from non-real solutions and collisions. This
Augmented Feasibility Maps: A Simultaneous Approach to Redundancy Resolution and Path Planning
169

increases the chances of finding a task trajectory that
successfully connects point A to any feasible point
of the goal set, which is the vertical line defined as:
{
(t, p
y
, q
1
) | t = 1, p
y
= 0, −π < q
1
< π
}
.
Generalizing the previous example, we propose a
method to solve the motion of redundant manipula-
tors to reach a goal task point x
g
in time t
g
. This
defines a goal set as an r-dimensional subset of the
AFM where the coordinates t and x are fixed to their
goal values (i.e., t = t
g
and x = x
g
), and the remaining
dimensions of q
r
are free to vary. The method ex-
plores the free space of the augmented space (t, x, q
r
)
to find a feasible trajectory connecting the initial con-
figuration of the manipulator to the goal set, simulta-
neously solving path planning (i.e., time history of the
task x) and redundancy resolution (i.e., q
r
). The pro-
posed method, which performs online, is described in
the following section.
Other works have proposed concurrently ad-
dressing both problems, albeit through different ap-
proaches. In (Tassi et al., 2021), a method based on
hierarchical quadratic programming is proposed to ef-
fectively augment the decision variables of the opti-
mization problem with the task trajectory. The au-
thors of (Zhou et al., 2023) propose a two-stage ap-
proach. First, an RRT is built by sampling points in
the task space. In the second stage, for each sam-
pled RRT node, self-motion manifolds are calculated,
and a joint trajectory is derived based on an exhaus-
tive search that evaluates an averaged performance in-
dex (e.g., reciprocal condition number) along each se-
quence of self-motion manifolds.
3 EXPLORING AFMs VIA RRT
The proposed method is based on the RRT algorithm.
Particularly, we employ the RRT* variant (Karaman
and Frazzoli, 2011), which is an extension that guar-
antees asymptotic optimality. In this section, we
present the modifications required to adapt the RRT*
algorithm to explore AFMs. Algorithm 1 outlines the
method. The general structure of the RRT* algorithm
is maintained, with the main difference being the spe-
cific definition of the procedures.
The first line of Algorithm 1 initializes the tree T
with a root node n
0
= s
0
, where s
0
is the initial state
of the robot. We define a state as a point in the AFM
space s =
t, x
T
, q
T
r
T
, while a node n is an element of
the tree T that contains a stored state s, and a pointer
to its parent node n
parent
. The main loop of the algo-
rithm is then entered, where T is expanded N times.
In each iteration, a random state s
rand
is sampled
Algorithm 1: RRT** algorithm.
1 Initialize tree T with root node n
0
= s
0
2 for i = 1 to N
3 s
rand
← SAMPLESTATE(α, x
g
)
4 n
near
← NEARESTNODE(s
rand
, T )
5 n
new
← STEER(n
near
, s
rand
, ∆s)
6 if FEASIBLECONNECTION(n
near
, n
new
)
7 N ← NEIGHBORS(n
new
, T , r)
8 n
parent
← BESTPARENT(N , n
new
)
9 Add n
new
to T with parent n
parent
10 T ← REWIRE(T , N , n
new
)
11 P ← BESTPATH(T )
from the AFM space (line 3). The SAMPLESTATE
function generates a random state in the domain of
the AFM. The t dimension of the AFM is constrained
to the interval [0, t
g
], where t
g
is the user-defined du-
ration of the trajectory. The x domain is defined by a
prior workspace analysis of the robot, and q
r
is con-
straint by the joint limits. To guide the exploration
towards the goal x
g
, samples are drawn from the goal
set (which depends on x
g
) with probability α, which
normally ranges from 0.05 to 0.2 (i.e., at most, 20%
of the samples generated in line 3 of Algorithm 1 will
belong to the goal set).
In line 4, NEARESTNODE finds the node n
near
in
the tree T that is closest to s
rand
. The distance metric
is given by a cost function defined by the user. For in-
stance, the cost function could be the weighted norm
of the differences between the states:
c(s
1
, s
2
) =
q
(s
2
− s
1
)
T
W (s
2
− s
1
) (7)
where W is a positive-definite diagonal matrix that
weights the dimensions of the AFM space, due to the
non-homogeneous units of the different coordinates
of s. The weights can be used to prioritize the mini-
mization of certain dimensions over others. One im-
portant aspect of the NEARESTNODE function is that
it must consider the time dimension t when computing
the distance between states. Since the time is strictly
monotonically increasing, only the states with a time
value less than that of s
rand
are considered.
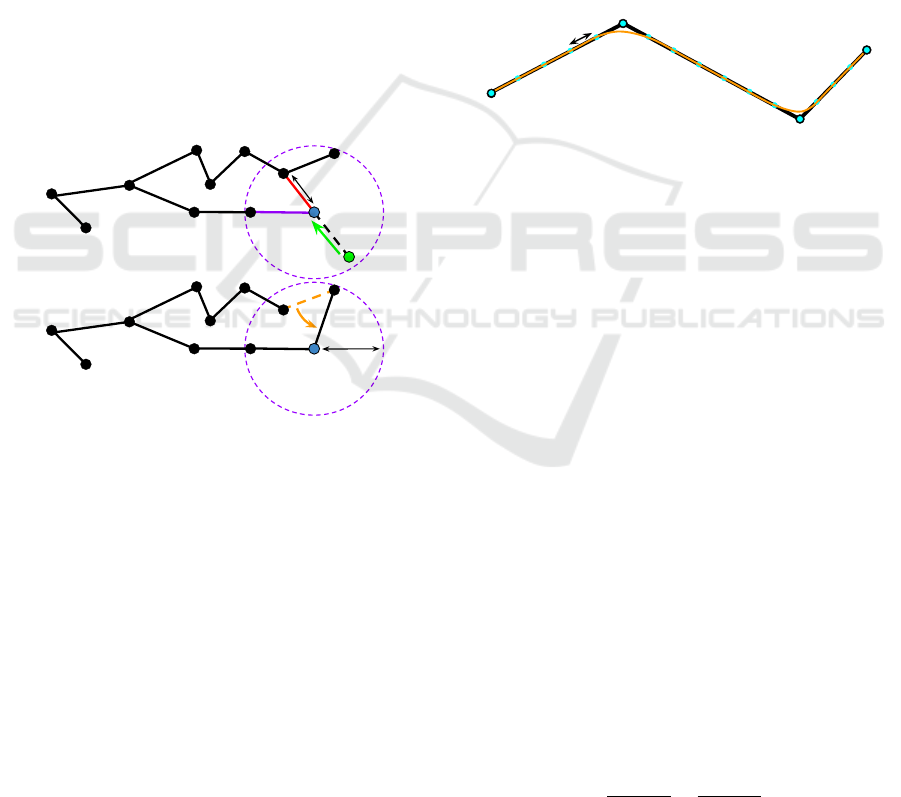
The STEER function (line 5) generates a new state
s
new
by moving an incremental distance ∆s from n
near
towards s
rand
. The ∆s parameter is a user-defined con-
stant that determines the step size of the exploration.
The function is exemplified in Figure 3(a), where n
new
is generated by moving from n
near
towards s
rand
with
a step size of ∆s.
Next, the FEASIBLECONNECTION function (line
6) determines if the connection between n
near
and
n
new
is feasible (red segment in Figure 3(a)). This
function evaluates if the segment between the two
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
170
states satisfies the kinematic constraints, i.e., configu-
rations are real and collision-free. If the connection is
feasible, the algorithm proceeds to the two character-
istic steps of the RRT* algorithm: the selection of the
parent node and the rewiring of the tree.
In line 7, the NEIGHBORS function computes the
set of nodes N in the tree T that are within a radius
r from n
new
. In Figure 3, the set of neighbors N are
represented by the nodes within the purple circle, of
radius r, centered at n
new
. Then, the BESTPARENT
function (line 8) selects the best parent node n
parent
from N . The best parent is the one that minimizes
the cost function defined in (7) for the entire path from
the root node n
0
to n
new
, routing through n
parent
. The
path and its cost can be computed by backtracking
from n
new
to its parent node, and so on until the root
node is reached, accumulating the cost of each seg-
ment during the process. The tree is then updated
by adding n
new
as a child of n
parent
(line 9). In Fig-
ure 3(b), the node n
new
is connected to its best parent
n
parent
(purple segment), instead of the parent n
near
that the original RRT would choose (red segment).
n
0
n
0
s
rand
n
new
STEER
Δs
r
n
new
n
near
n
parent
REWIRE
(a)
(b)
Figure 3: Procedures of the RRT* algorithm.
Finally, the REWIRE function in line 10 updates
the tree T by performing a local analysis of the neigh-
borhood of n
new
. The same set of neighbors N as in
BESTPARENT is employed, but the roles are swapped.
In this case, the function evaluates if the path from the
root node to each neighbor in N can be improved by
routing through n
new
. If the path is improved for any
neighbor, the parent of such neighbor is updated to
n
new
, and the tree is restructured accordingly. This
process is illustrated in Figure 3(b).
Once the main loop is completed, the BESTPATH
function (line 11) is called to extract the best path P
from the tree T . Calculating the cost in a similar way
to the BESTPARENT and REWIRE functions, every
path from the root node to each node that lies in the
goal set is evaluated, and the best path P is selected.
Due to the nature of the RRT* algorithm, the re-
turned path presents discontinuous velocities, as well
as infinite accelerations at the node points. To address
this issue, a post-processing step is required to smooth
the path. We propose employing a cubic b-spline in-
terpolation to generate a smooth trajectory that con-
nects the nodes of the path. Similarly to (Fabregat-
Jaen et al., 2023), a series of intermediate control
points are generated between each pair of consecutive
nodes, and the b-spline is fitted to these points (see
Figure 4). However, instead of defining a fixed num-
ber of control points per segment, we propose em-
ploying the value of ∆s as the distance between con-
trol points. Since the values of ∆s are small, the re-
sulting b-spline will not deviate significantly from the
original path, i.e., there is little risk that the smoothed
path becomes unfeasible due to invading forbidden re-
gions, while ensuring a smooth trajectory.
n
1
n
2
n
3
n
0
Δs
Figure 4: B-Spline interpolation (orange) of the original
path (black) along the blue control points.
4 SIMULATIONS
In this section, we present results of the proposed
method for different combinations of manipulators
and tasks. The simulations are conducted in an In-
tel Core i7-9700F CPU @ 3.00GHz with 32 GB of
RAM, running Ubuntu 24.04. The code is imple-
mented in Python 3.12.
4.1 2-DoF Robot, 1-Dimensional Task
The first example corresponds to the same scenario
considered in the first experiment of (Fabregat-Jaen
et al., 2023). It consists of a 2-DoF planar ma-
nipulator and a 1-dimensional task, shown in Figure
2. However, instead of tasking the manipulator with
tracking a predefined trajectory, only the final task
point is specified, and corresponds to the p
y
coordi-
nate of the end-effector being equal to 0 at t
g
= 1 (see
green line at Figure 5(b)). The kinematic constraints
are defined by the joint limits q
i
∈ [−π, π]rad ∀i ∈
{1, 2}, and an elliptical obstacle that the end-effector
must avoid (red ellipse in Figures 2 and 5(b)), defined
by the equation
(p
x
−1.1)
2
1
2
+
(p
y
+0.2)
2
0.25
2
≤ 1. Both links
of the manipulator l
1
and l
2
have a length of 1m. We
selected q
1
as the single redundant parameter in q
r
.
For this example, we set the RRT* parameters as
Augmented Feasibility Maps: A Simultaneous Approach to Redundancy Resolution and Path Planning
171
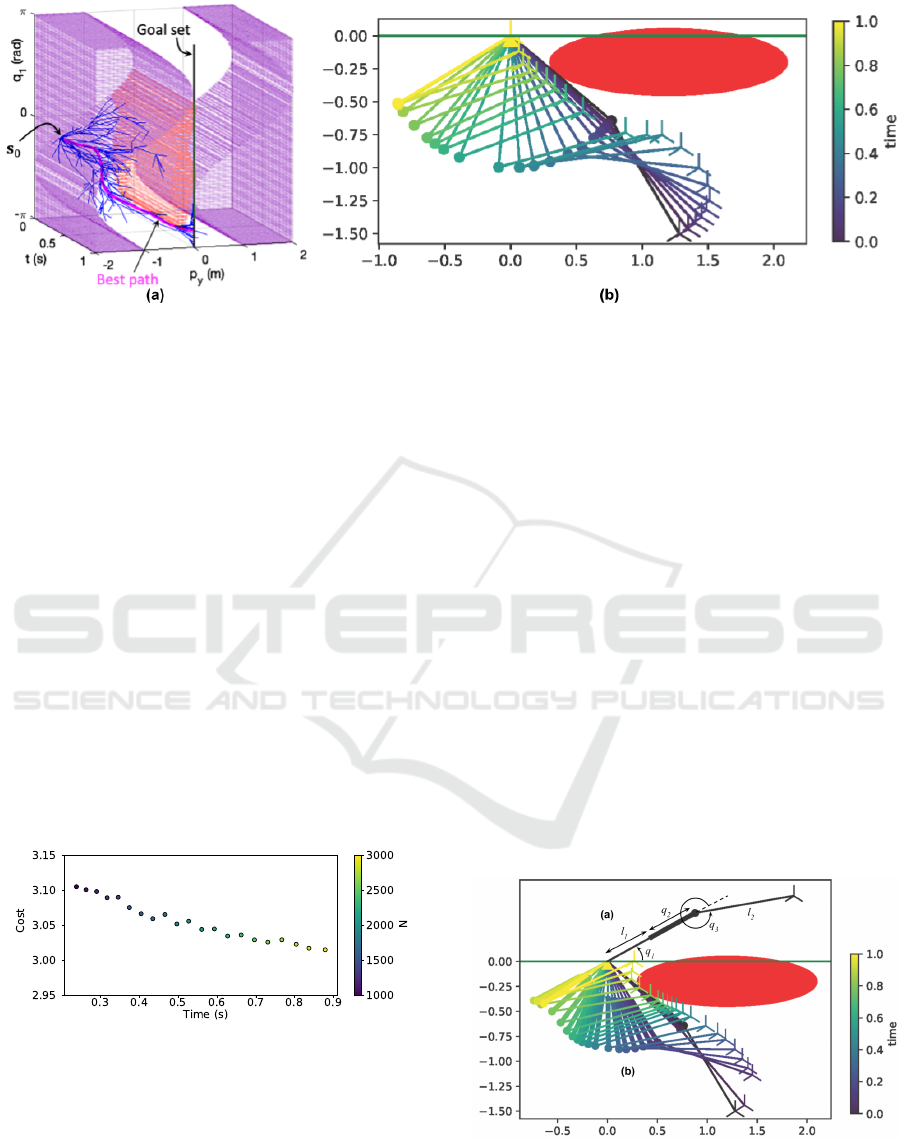
Figure 5: (a) AFM and RRT solution for a 2-DoF manipulator and a 1-dimensional task. (b) Corresponding robot motion.
follows: ∆s = 0.2, r = 0.4, α = 0.2 and N = 1000.
The cost function corresponds to the one defined in
(7), with W = I.
Figure 5(a) illustrates the AFM for the imposed
constraints and an executed RRT* tree that explores
the AFM. The same color code as in the FMs in Sec-
tion 2 is employed. In addition, the best path com-
puted is plotted in green, and its corresponding robot
motion is represented in Figure 5(b) for different time
values. It is worth remarking that the AFM is illus-
trated only for visual purposes, as the method does
not require the computation of the AFM.
In addition, in Figure 6, we present a graph that
shows the execution times of the RRT* algorithm, as
well as the cost of the solution, averaged over 100
runs, for different values of the number of iterations
N. As expected, the execution times proportionally
increase with the number of iterations. As for the cost
of the solution, although some variability is observed,
the values seem to follow a decreasing trend as the
number of iterations increases.
Figure 6: Execution time versus cost of the solution for 21
different values of N, averaged over 1000 runs.
4.2 3-DoF Robot, 1-Dimensional Task
Finally, we consider an RPR (Revolute-Prismatic-
Revolute) planar manipulator (shown in Figure 7(a))
and a 1-dimensional task, which produces redundancy
r = 2 and a 4-dimensional AFM. The same final task
value and kinematic constraints as in the previous
example are considered. However, in order to in-
crease the complexity of the problem and showcase
the method’s efficiency, we consider that the entire
manipulator must avoid the obstacle, rather than just
the end-effector. For this purpose, we have employed
the HPP-FCL library (Pan et al., 2024) to evaluate the
collisions between the manipulator and the obstacle.
The new prismatic joint coordinate q
2
is restricted to
q
2
∈ [0, 1]m, and its value extends the length of the
first link of the manipulator. The redundant param-
eter vector is composed of the first revolute and the
prismatic coordinates: q
r
= [q
1
, q
2
]
T
.
The same RRT* parameters as for the previous
experiment are used, which are: ∆s = 0.2, r = 0.4,
α = 0.2, N = 1000 and W = I.
Since the corresponding AFM is 4-dimensional, it
is not possible to visualize it directly. Therefore, we
only present different time values of the robot motion
in Figure 7(b). The average execution time for 100
runs is 97.3ms, demonstrating the method’s efficiency
in solving the problem, even when considering whole-
body collisions and a higher-dimensional AFM.
Figure 7: (a) RPR manipulator. (b) Algorithm solution.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
172

5 CONCLUSIONS
In this paper, we have proposed a method to solve
the motion of redundant manipulators to reach a goal
task point in a given time. The method is based on the
RRT* algorithm, which is adapted to explore AFMs,
which incorporate the task trajectory into the feasibil-
ity analysis. The proposed method is capable of si-
multaneously solving path planning and redundancy
resolution, and it is demonstrated to be efficient in
two examples of planar manipulators with different
degrees of redundancy. The method overcomes the
limitations of previous works that require a predefined
task trajectory, which may not be always feasible.
In the future, we will implement direct compar-
isons with other methods that address the redundancy
resolution and path planning problem, such as the hi-
erarchical quadratic programming method proposed
in (Tassi et al., 2021) and the two-stage approach pro-
posed in (Zhou et al., 2023). In addition, the inher-
ent flexibility of the RRT algorithm will allow our
method to incorporate non-holonomic constraints, as
well as dynamic constraints, since the time dimension
is taken into account in the AFM space.
Additional future work should focus on extend-
ing the method to higher dimensionalities, as well as
incorporating dynamic constraints and obstacles that
move in time. Moreover, the method could be ex-
tended to consider every AFM that corresponds to dif-
ferent extended aspects. Finally, the method should
be tested in real robotic systems to evaluate its perfor-
mance in practical scenarios.
ACKNOWLEDGEMENTS
Work supported by project PID2020-116418RB-
I00 and grant PRE2021-099226, funded by
MCIN/AEI/10.13039/501100011033 and the ESF+.
REFERENCES
Albu-Sch
¨
affer, A. and Sachtler, A. (2023). Redundancy
resolution at position level. IEEE Transactions on
Robotics.
Borrel, P. and Li
´
egeois, A. (1986). A study of multiple
manipulator inverse kinematic solutions with applica-
tions to trajectory planning and workspace determi-
nation. In Proceedings. 1986 ieee international con-
ference on robotics and automation, volume 3, pages
1180–1185. IEEE.
Burdick, J. W. (1989). On the inverse kinematics of re-
dundant manipulators: Characterization of the self-
motion manifolds. In Advanced Robotics: 1989: Pro-
ceedings of the 4th International Conference on Ad-
vanced Robotics Columbus, Ohio, June 13–15, 1989,
pages 25–34. Springer.
Fabregat-Jaen, M., Peidro, A., Gil, A., Valiente, D., and
Reinoso, O. (2023). Exploring feasibility maps for
trajectory planning of redundant manipulators using
rrt. In 2023 IEEE 28th International Conference
on Emerging Technologies and Factory Automation
(ETFA), pages 1–8. IEEE.
Ferrentino, E. and Chiacchio, P. (2020). On the optimal
resolution of inverse kinematics for redundant manip-
ulators using a topological analysis. Journal of Mech-
anisms and Robotics, 12(3):031002.
Karaman, S. and Frazzoli, E. (2011). Sampling-based algo-
rithms for optimal motion planning. The international
journal of robotics research, 30(7):846–894.
Kazemipour, A., Khatib, M., Al Khudir, K., Gaz, C., and
De Luca, A. (2022). Kinematic control of redundant
robots with online handling of variable generalized
hard constraints. IEEE Robotics and Automation Let-
ters, 7(4):9279–9286.
P
´
amanes G, J. A., Wenger, P., and Zapata D, J. L. (2002).
Motion planning of redundant manipulators for spec-
ified trajectory tasks. Advances in Robot Kinematics:
Theory and Applications, pages 203–212.
Pan, J., Chitta, S., Pan, J., Manocha, D., Mirabel, J., Car-
pentier, J., and Montaut, L. (2024). HPP-FCL - An
extension of the Flexible Collision Library.
Peidro, A. and Haug, E. J. (2023). Obstacle avoidance in
operational configuration space kinematic control of
redundant serial manipulators. Machines, 12(1):10.
Peidro, A., Reinoso, O., Gil, A., Mar
´
ın, J. M., and Paya,
L. (2018). A method based on the vanishing of
self-motion manifolds to determine the collision-free
workspace of redundant robots. Mechanism and Ma-
chine Theory, 128:84–109.
Reveles, D., Wenger, P., et al. (2016). Trajectory planning
of kinematically redundant parallel manipulators by
using multiple working modes. Mechanism and Ma-
chine Theory, 98:216–230.
Tassi, F., De Momi, E., and Ajoudani, A. (2021). Aug-
mented hierarchical quadratic programming for adap-
tive compliance robot control. In 2021 IEEE interna-
tional conference on robotics and automation (ICRA),
pages 3568–3574. IEEE.
Wenger, P., Chedmail, P., and Reynier, F. (1993). A global
analysis of following trajectories by redundant manip-
ulators in the presence of obstacles. In [1993] Pro-
ceedings IEEE International Conference on Robotics
and Automation, pages 901–906. IEEE.
Whitney, D. E. (1969). Resolved motion rate control of ma-
nipulators and human prostheses. IEEE Transactions
on man-machine systems, 10(2):47–53.
Zanchettin, A. M. and Rocco, P. (2017). Motion planning
for robotic manipulators using robust constrained con-
trol. Control Engineering Practice, 59:127–136.
Zhou, Z., Zhao, J., Zhang, Z., and Li, X. (2023). Motion
planning method of redundant dual-chain manipula-
tor with multiple constraints. Journal of Intelligent &
Robotic Systems, 108(4):69.
Augmented Feasibility Maps: A Simultaneous Approach to Redundancy Resolution and Path Planning
173
