
Model for Detecting Illegal Tree Felling in the Protected Area of Bagua in
Amazonas Using Convolutional Neural Networks
Wilmer Calle Carbajal
a
, Julio Ra
´
ul Huam
´
an Llantoy
b
and Jymmy Dextre Alarcon
c
Peruvian University of Applied Sciences, Lima, Peru
Keywords:
Detection Model, Illegal Logging, Deforestation, Sound Recognition, Convolutional Neural Networks.
Abstract:
Illegal logging is a problem that occurs in different regions of Peru, causing deforestation, biodiversity loss,
and contributing to climate change.Despite the efforts of organizations and governments to combat this prob-
lem, constant detection and monitoring are challenging due to the vast extension of forests and the lack of
human resources to effectively monitor all areas.Therefore, the use of a detection model is proposed as a solu-
tion to detect illegal logging in real time through chainsaw sound. This model consists of four phases: Input,
Analysis, Execution, and Output.Phase 1 focuses on the collection of sounds from recording devices. Phase
2 analyzes and processes the characteristic chainsaw sounds. Phase 3 focuses on the execution of the model.
Phase 4 will display the result of the detection as a numerical value 1 or 0 as the case may be.The results of
the experimental validation were obtained by using mobile devices to record and send audio to the detection
model. These results were positive and acceptable in terms of accuracy in detecting illegal logging activities,
achieving a 10% reduction in such activities.
1 INTRODUCTION
Illegal logging is one of the main causes of defor-
estation in Peru, with serious consequences for the
environment and society in different departments of
Peru (Praeli, 2021). The lack of surveillance and
control has allowed this illegal practice to continue
unchecked. In this sense, illegal logging has increased
in 2020, reaching 200 thousand hectares, the high-
est figure in the last two decades (Romero, 2017).
This phenomenon has devastating consequences for
ecosystems. According to a report by the Ministry of
the Environment (Minam) from mid-2020, a loss of
7,119 hectares of forest was recorded in Peru, which
represents a 28.7% reduction in deforestation com-
pared to the same period of the previous year accord-
ing to (Watch, 2023). Furthermore, a new study on
illegal logging in the Peruvian Amazon prepared by
the Ministry of Justice and Human Rights and the US-
AID Prevent Project confirms that illegal logging and
trafficking of timber forest products are in the pro-
cess of expansion and its mechanisms for operating
are increasingly sophisticated and complex according
a
https://orcid.org/0009-0005-9218-8470
b
https://orcid.org/0009-0007-8845-0901
c
https://orcid.org/0000-0002-1686-0510
to (D. H., 2022). For its part, the Amazonian Georef-
erenced Socio-Environmental Information Network
(RAISG), in its study entitled ”The Plundered Ama-
zon”, confirms that the surface area destined for ille-
gal mining is increasing (Romero, 2017). This activ-
ity is linked to increased human activity, which in turn
is related to the growth of deforestation in the region
according to (Georreferenciada, 2018). Given this
problem, other countries such as Brazil implemented
forest early warning systems that provide information
on changes in forests to national governments through
Landsat 7 and 8 satellites for monitoring purposes
(Watanabe et al., 2021). Likewise, in Indonesia, they
implemented a logging detection system through su-
pervised algorithm techniques with wireless detection
sensors that allowed detecting sounds in the environ-
ment to then analyze and process (Sboui et al., 2023).
On the other hand, in Peru the GeoBosque system
has been developed, which makes use of technologies
such as remote sensing, GPS and real-time tracking
and monitoring technologies and this system sends
email alerts if it detects changes in forestation (GEO-
BOSQUE, 2017). However, these solutions based on
satellite data are not very effective due to external fac-
tors such as the weather, the environment does not
work as expected. Therefore, there are other tech-
niques based on convolutional neural networks that
242
Carbajal, W. C., Llantoy, J. R. H. and Alarcon, J. D.
Model for Detecting Illegal Tree Felling in the Protected Area of Bagua in Amazonas Using Convolutional Neural Networks.
DOI: 10.5220/0012948400003825
In Proceedings of the 20th International Conference on Web Information Systems and Technologies (WEBIST 2024), pages 242-249
ISBN: 978-989-758-718-4; ISSN: 2184-3252
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
are more effective in dealing with climatic factors,
this uses real-time data.
Therefore, our proposal is to develop a sound de-
tection model to solve the problem of illegal log-
ging. It consists of 4 phases: data entry, data analysis,
model execution and obtaining results which indicate
whether it is a logging or not based on the character-
istics of the sound with which the model was trained.
The article is organized as follows: Section 2
presents the work related to the problem, Section 3
presents the proposed model for detection, Section
4 explains how the model will be validated, Section
5 presents the results obtained with their discussion,
and finally Section 6 mentions the conclusions and fu-
ture work.
2 RELATED WORKS
In this section, a literature review was carried out to
analyze the related works that support the research.
A systematic review of the literature (Kitchenham,
2007) was carried out where the following phases
were applied: 1) Planning of the review, 2) devel-
opment and 3) Analysis and results. It began with
the definition of the research questions, which are:
(P1), What components are used for detecting tree
felling? (P2) What algorithms are used for detecting
tree felling? (P3) What technologies are used to alert
tree felling? (P4) How are illegal logging detection
models validated?
They also defined the following keywords: “Tree
felling”, “deforestation”, “Machine learning”, “Con-
volutional Neural Networks” and “sound detection”.
Subsequently, searches were carried out in research
repositories such as Scopus, Scielo, IEEE Xplore,
EBSCO, Re-searchGate and WebOfScience. All ar-
ticles considered for the research were from journals
published after 2020. Finally, for the analysis of the
articles, a taxonomy related to the questions formu-
lated for the selection of articles was used (see table
3).
Regarding the components, seven main ones used
in the detection of illegal logging have been iden-
tified: wired sound sensors, satellite image sensors
(Saha et al., 2022; Mayfield et al., 2020) , drones
(Sethi et al., 2020), IoT sensors, GPS devices, in-
frared (IR) sensors, and vibration and tilt sensors (Ku-
mar, 2022). Of all these, wireless sound sensors and
vibration sensors stand out as the most effective in
detecting ambient sound in monitored areas. These
sensors, in combination with IoT technology, allow
for more accurate and real-time detection of suspi-
cious activities, such as the use of chainsaws (Kumar,
Table 1: Classification of articles.
Taxonomy Sources
Component (P1) (Sethi et al., 2020), (Saha
et al., 2022), (Kitchen-
ham, 2007), (Doblas
et al., 2020), (Watanabe
et al., 2021), (Sboui et al.,
2023), (Kim et al., 2020),
(Bogomolov, 2021),
(Casallas, 2022), (S.,
2022), (Kumar, 2022),
(Simiyu and Vikiru, 2017)
Algorithm (P2) (Sethi et al., 2020), (Saha
et al., 2022), (Kitchen-
ham, 2007), (Ball et al.,
2022), (Antonelli et al.,
2023), (Hethcoat et al.,
2021), (Simiyu and
Vikiru, 2017)
Technology (P3) (Saha et al., 2022),
(Kitchenham, 2007), (Al-
Obaidi, 2017), (Doblas
et al., 2020), (Dong et al.,
2023), (Antonelli et al.,
2023), (Sethi et al., 2020),
(Liao et al., 2022), (Ku-
mar, 2022), (Simiyu and
Vikiru, 2017)
Validation (P4) (Doblas et al., 2020), (Ball
et al., 2022), (Marmaroli
et al., 2023), (Kim et al.,
2020), (Hethcoat et al.,
2021), (Dominguez et al.,
2022), (Kumar, 2022),
(Simiyu and Vikiru, 2017)
2022). The ability to analyse and classify the data
captured by these sensors makes them key tools for
detecting illegal logging, providing an efficient and
robust method for identifying and responding to these
environmental threats.
Regarding the algorithms used in illegal logging
detection, we have identified five main ones: Sup-
port Vector Machine (SVM) (Saha et al., 2022),
Convolutional Neural Network (CNN) (Kitchenham,
2007), Rain-Forest (Antonelli et al., 2023), Refined
Algorithm (Watanabe et al., 2021), and Transform-
ers (Sboui et al., 2023). After a review of each one,
we conclude that the Convolutional Neural Network
(CNN) stands out for its superior effectiveness and
precision in the classification, analysis, and prediction
of sounds, especially when trained with chainsaw-
specific data. This ability of CNN to capture and learn
complex features of sound data makes it the most suit-
Model for Detecting Illegal Tree Felling in the Protected Area of Bagua in Amazonas Using Convolutional Neural Networks
243

able option for the development of an alert system for
the detection of illegal logging. Therefore, we will
implement a CNN-based model, trained on a dataset
of chainsaw sounds, which will be integrated into an
application to facilitate the identification and response
to illegal logging activities.
Likewise, regarding the ”Technologies”, we found
4 which are: Python (Mayfield et al., 2020), Amazon
Web Services (Dong et al., 2023), Tensorflow (Ball
et al., 2022), Google Maps (Kim et al., 2020). For our
purposes, we will use Tensorflow technology to test
the sound classification and prediction model. Addi-
tionally, we will use Google Maps to determine the
location and show the detected illegal logging. Ad-
ditionally, we will use Firebase push notification to
send alerts, which is how we differentiate ourselves
from the other proposals.
Finally, regarding the “Validation”, the most no-
table were, an intelligent system based on IoT oper-
ated by solar energy to monitor illegal logging val-
idated in the field of study. (Kumar, 2022), intelli-
gent IoT remote sensing through terrestrial networks
to alert logging (Antonelli et al., 2023), drone sound
detection (Dong et al., 2023), classification of domes-
tic animal sounds, the validation was carried out in a
real environment with a pig sound (Liao et al., 2022),
characterizing soundscapes in various ecosystems us-
ing a set of universal acoustic features (Hethcoat et al.,
2021; Bogomolov, 2021), for our validation of the
problem of illegal logging we will use mobile devices
powered by solar panels that record and send data to
the model which makes the detection in real time.
3 PROPOSED MODEL
In the present model, 4 phases will be developed to
effectively address the problem of illegal logging in
Bagua, Amazonas, Peru. These phases include: Data
input, which will focus on collecting environmental
sounds using recording devices strategically placed in
the region. Data analysis, where the collected data
will be processed and cleaned to remove background
noise and normalize it, preparing it for analysis with
convolutional neural networks (CNN) and model ex-
ecution, which will use CNNs to detect and classify
complex patterns in the auditory data, identifying sus-
picious illegal logging activities. In the final phase,
a performance evaluation of the trained model is car-
ried out, using specific evaluation metrics such as pre-
cision, recall, and F1-score, among other measures.
This structured approach will allow for a robust and
effective implementation of the predictive model, pro-
viding a valuable tool for forest conservation and the
protection of indigenous and local communities.
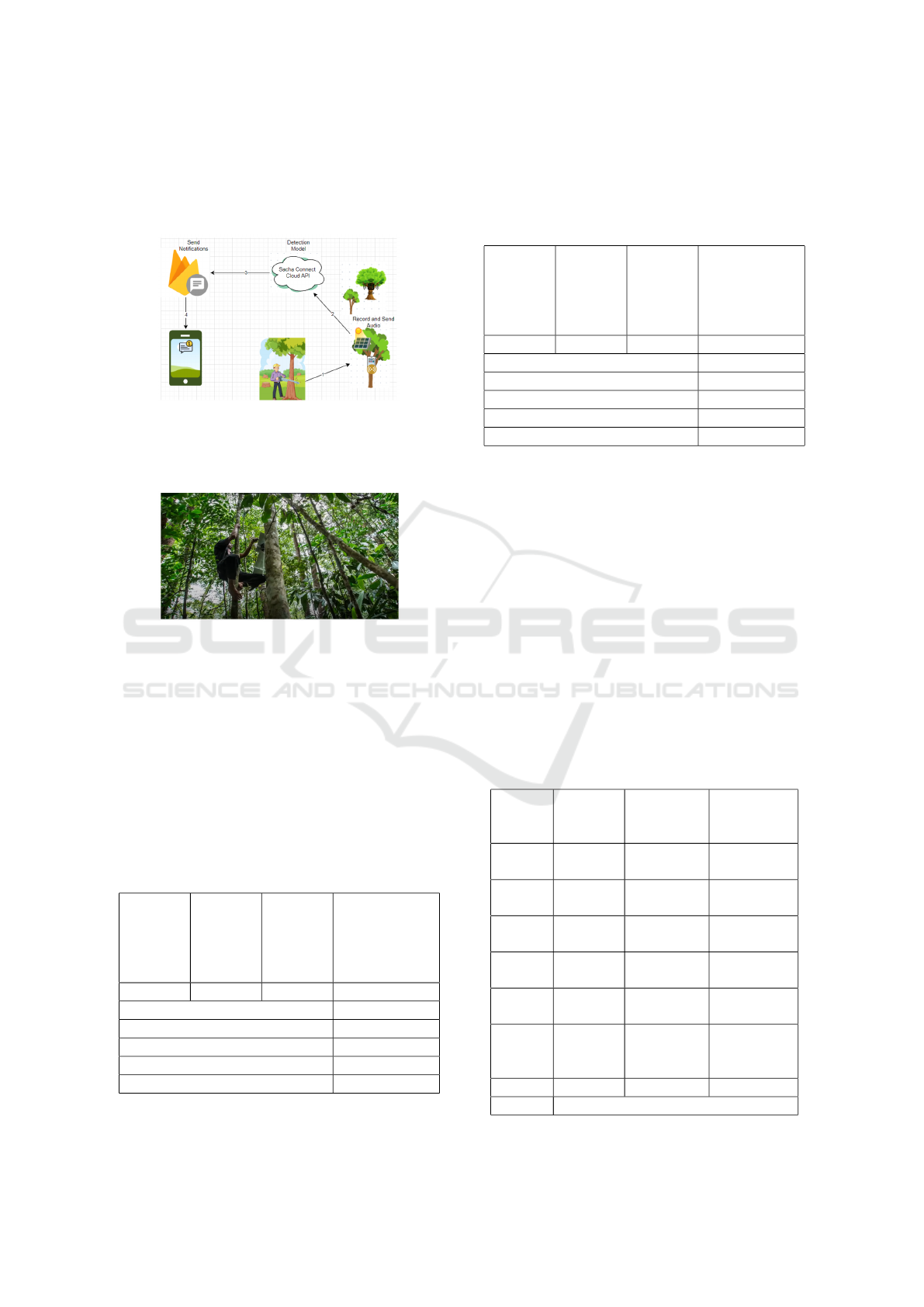
Figure 1: Architecture diagram of the proposed detection
model.
3.1 Phase 1: Data Entry
The objective of this phase is to ensure the quality and
integrity of the collected audio data. Therefore, two
key activities were defined: (1) Select device, Upload
files.
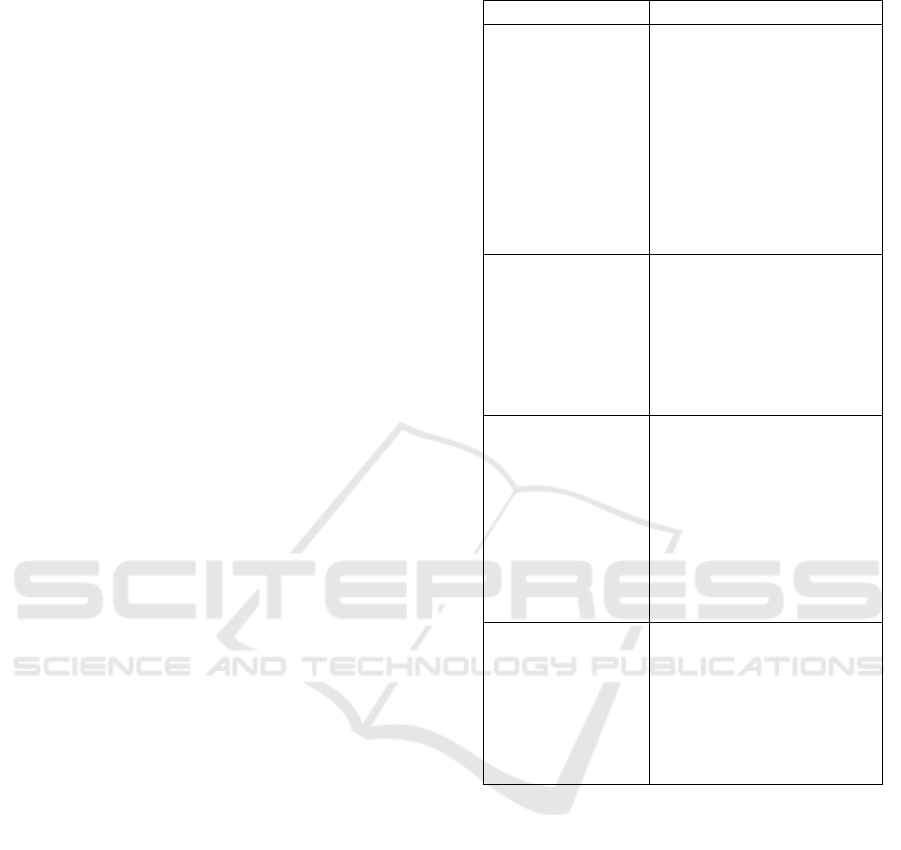
It is essential to ensure high-quality audio capture.
To do this, a technological tool is used based on dis-
carded cell phones, modified and equipped with so-
lar panels and a Movo VXR10 universal shotgun mi-
crophone. These devices are installed in the treetops,
from where they send real-time alerts to the phones
of people authorized by the community. In addition,
they function as a GPS system, providing the exact
coordinates of the place where damage to the forest
could be occurring. With this information, actions
are coordinated with the competent environmental au-
thorities to intervene in a timely manner and mitigate
any possible damage in the area.
Next, we will proceed to upload the audio files.
This involves transferring the data from the mobile
device to a development or processing platform. Var-
ious methods can be used for this task, such as USB
connection or cloud storage. It is essential to main-
tain the integrity of the data during the transfer and to
organize it in an orderly and secure manner for easy
access and manipulation later.
3.2 Phase 2: Data Analysis
The objective of this phase is to improve the data
preparation in order to enhance the CNN model’s
ability to detect and understand the relevant patterns
present in the audio files. Therefore, two key activi-
ties were defined: (1) Extraction of relevant features,
(2) Data normalization.
Regarding the extraction of relevant features, it is
WEBIST 2024 - 20th International Conference on Web Information Systems and Technologies
244
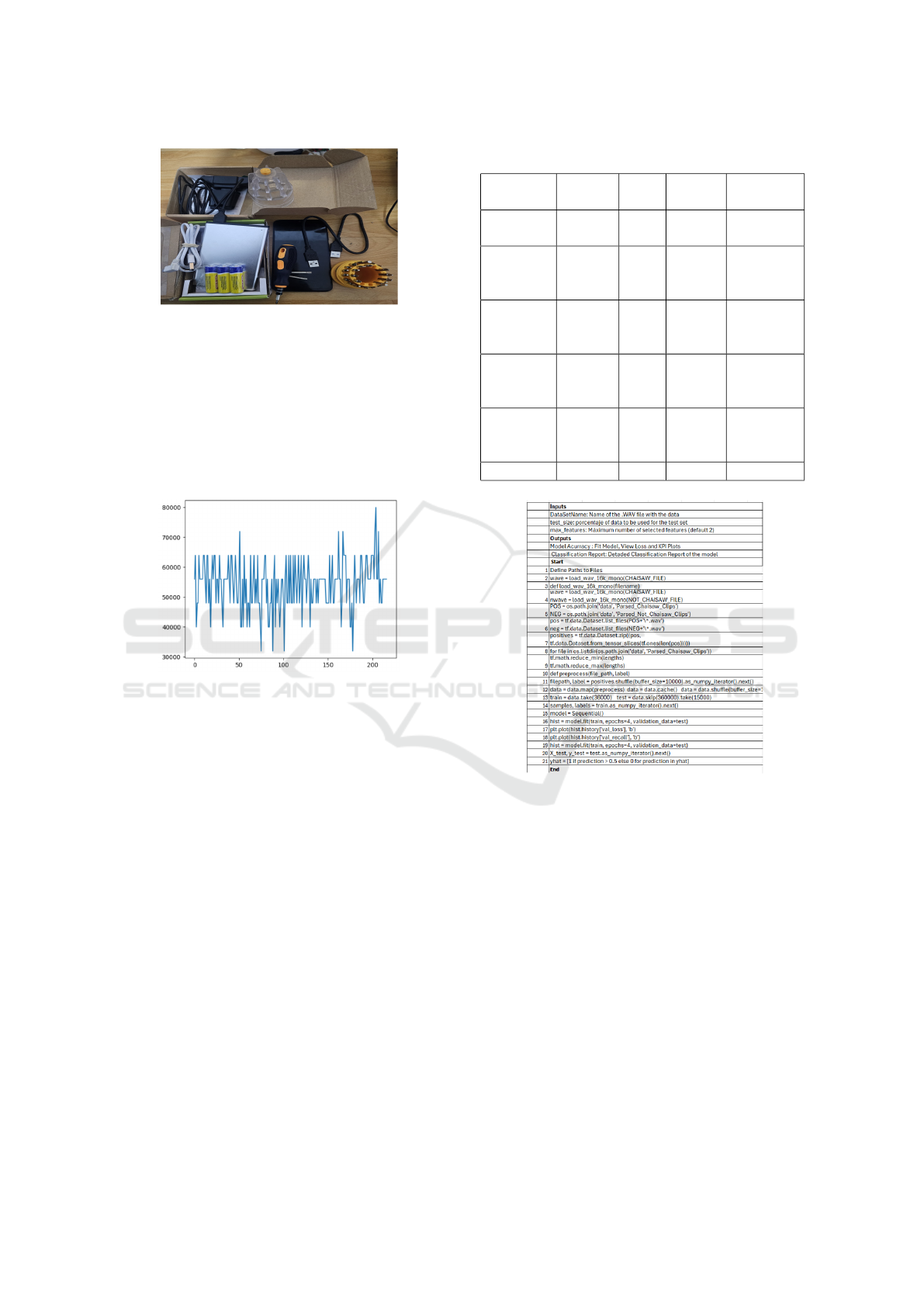
Figure 2: Sensor Components (Mobile).
essential to verify spectrograms or frequency charac-
teristics, in order to obtain crucial information about
the acoustic structure of the files and facilitate the
identification of significant patterns.
We will then proceed to normalize the data in or-
der to ensure its proper adaptation to processing by
the CNN model, thus ensuring consistency and com-
parability between the different data sets.
Figure 3: Average chainsaw call duration and wave cycle
length.
3.2.1 Phase 3: Execution of the Model
The objective of this phase is to implement and train
the convolutional neural network (CNN) architecture,
ensuring its ability to detect relevant patterns in the
input data. Therefore, two key activities were defined:
(1) Definition of the CNN structure, (2) Training the
model.
Regarding the definition of the CNN structure,
it is essential to determine the number and configu-
ration of the convolutional, pooling, and fully con-
nected layers, crucial aspects for its ability to capture
and learn relevant patterns. We will then proceed with
training the model using the data prepared in the anal-
ysis phase to adjust the network weights and mini-
mize the loss, through repeated iterations where the
model learns and adapts to improve its classification
ability.
Table 2: Classification of articles.
Layer Type Filter
size
Outputs Activation
Input - - 32 x
32 x3
-
Convolu
-cional 1
Conv2D 3x3 32 x
32 x
32
ReLU
Pooling
1
MaxPoo
-
ling2D
2x2 16 x
16 x
32
-
Convolu
-cional 2
Conv2D 3x3 16 x
16 x
64
ReLU
Pooling
2
MaxPoo
-
ling2D
2x2 8 x 8 x
64
-
Flattening Flatten - 2048 -
Figure 4: Artificial intelligence algorithm pseudocode.
3.2.2 Phase 4: Output of Results
The objective of this phase is to evaluate the perfor-
mance of the trained model in the audio classification
task, using specific metrics such as precision, recall
and F1-score on a test data set, to determine its effec-
tiveness and reliability in detecting illegal tree felling
activities. Therefore, two key activities were defined:
(1) Performance evaluation, (2) Comparison of re-
sults. Regarding the evaluation of the performance
of the trained model, specific metrics such as preci-
sion, recall and F1-score will be evaluated on a test
data set, to determine its effectiveness and reliability
in detecting illegal tree felling activities. Finally, we
will proceed with the comparison of results with the
objectives initially established to determine whether
the model meets the expected precision and robust-
Model for Detecting Illegal Tree Felling in the Protected Area of Bagua in Amazonas Using Convolutional Neural Networks
245
ness requirements.
1. Accuracy: Measures the proportion of all correct
predictions (both true positives and true negatives)
out of the total number of predictions. It is an
overall measure of the model’s performance.
Accuracy =
T P + T N
T P + T N + FP + FN
(1)
2. Precision: Indicates the proportion of predicted
positive cases that are truly positive. High preci-
sion means that few of the predicted positive cases
are false positives.
Precision =
T P
T P + FP
(2)
3. Recall: Indicates the model’s ability to detect all
true positive cases in the dataset. A high recall
means that few positive cases are missed.
Recall =
T P
T P + FP
× 100 (3)
4. F1-Score: Combines the precision and recall
scores.
2 ×
precision + recall
precision ∗ recall
(4)
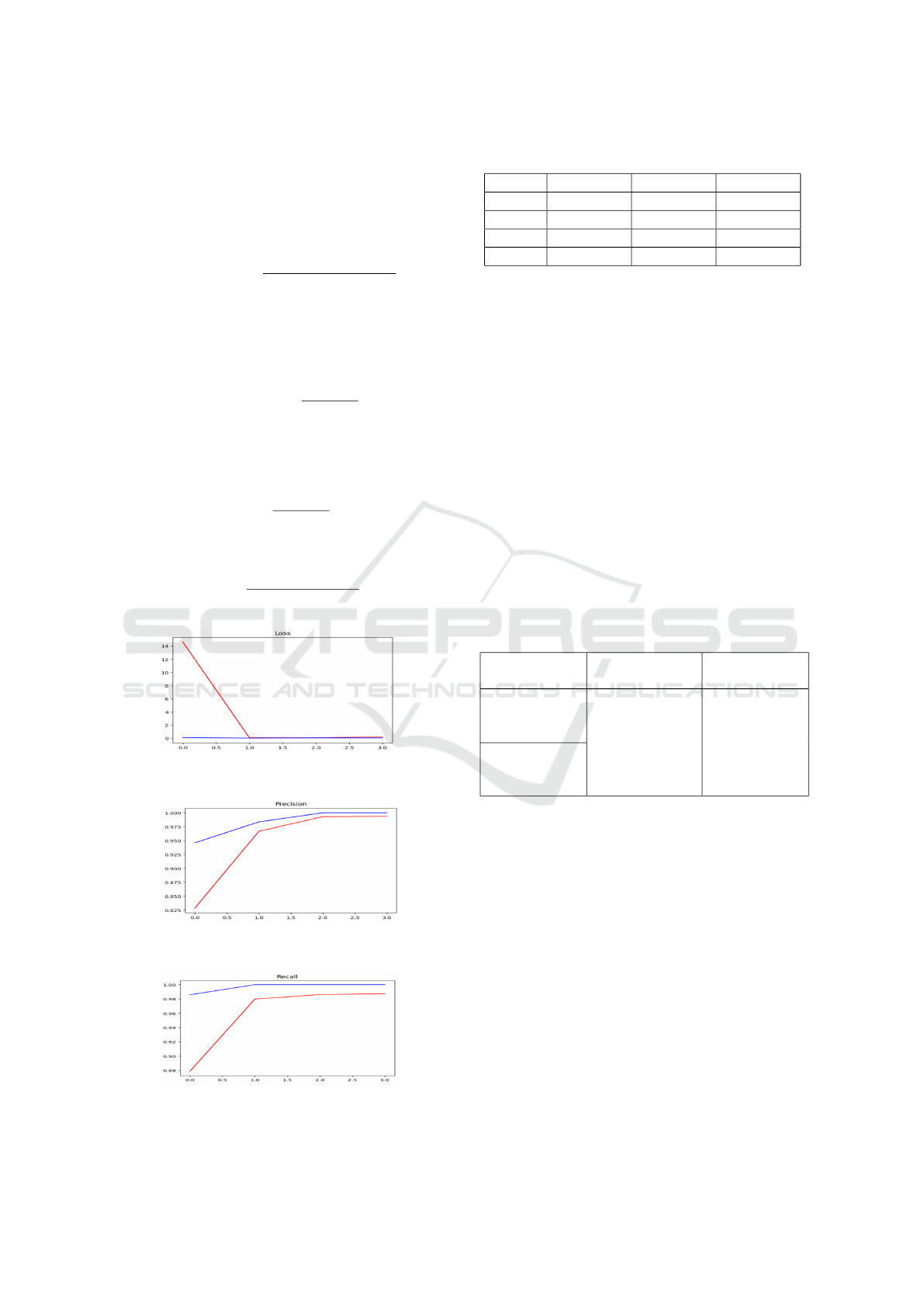
Figure 5: Loss Chart.
Figure 6: Accuracy Chart.
Figure 7: Recall Chart.
Table 3: Classification of articles.
Period Loss Recall Precision
1 14.6007 0.8788 0.8286
2 0.0666 0.9797 0.9667
3 0.0490 0.9862 0.9931
4 0.2184 0.9875 0.9937
The model shows a steady improvement through-
out the epochs, especially in the first three. The slight
decrease in validation loss and increase in training
loss in the fourth epoch could be a sign of overfit-
ting, although the recall and precision values are still
perfect.
4 VALIDATION
The model will be validated in collaboration with the
Municipality of the Bagua district, located in Peru.
The validation will be carried out in a specific area of
500 square meters within the protected area. Monitor-
ing activities were carried out in two different areas.
This was done to assess how variations in the environ-
ment could affect the detection of logging activity.
To validate the proposed model, two scenarios
were carried out. Scenario 1, Scenario 2
Table 4: STAGES.
Stage Features to
Evaluate
Place
Logging
Sounds Near
Sensor
Model accuracy
Sector 5 of the
Municipality of
Bagua
Remote Sen-
sor Felling
Sounds
1. Scenario 1: Illegal logging sounds occur at a dis-
tance of 60 to 120 meters from the sensor, al-
lowing the model’s ability to detect high intensity
sounds with minimal interference from ambient
noise to be assessed. Audio captured in this envi-
ronment is characterized by increased clarity and
volume. The goal is to measure the model’s ac-
curacy under optimal conditions, assess its ability
to detect intense sounds, and validate its effective-
ness with clear and nearby sounds.
2. Scenario 2: Illegal logging sounds occur at a dis-
tance of 130 to 310 meters from the sensor, allow-
ing to evaluate the model’s ability to detect lower
intensity sounds with a higher probability of in-
terference from ambient noise. Audio captured in
this environment, characterized by lower clarity
and volume, is crucial to measure the model’s ac-
WEBIST 2024 - 20th International Conference on Web Information Systems and Technologies
246
curacy under more challenging and realistic con-
ditions, evaluate its ability to detect low intensity
sounds, and validate its effectiveness with distant
and less clear sounds.
Figure 8: The mobile device is placed in the treetops,
records the sounds of the environment and sends the data
via the mobile cellular telephone network to detect illegal
logging patterns.
Figure 9: Team member Sacha, next to a mobile device,
equipped with an audio sensor, an old smartphone.
5 RESULTS
To evaluate the effectiveness of the illegal tree felling
detection model, tests were conducted in two dif-
ferent scenarios. These scenarios helped evaluate
the model’s ability to detect high and low intensity
sounds, as well as its performance under different am-
bient noise interference conditions.
Table 5: Sounds of logging near the sensor.
Sounds
of
felling
Non-
logging
sounds
Correctly
iden-
tified
felling
sounds
Non-logging
sounds
correctly
identified
350 150 330 140
Total of sounds 500
Effectiveness on Stage
Accuracy 93%
Precision 96%
Recall 94%
The model showed 93% effectiveness in this sce-
nario, indicating a high ability to detect logging
sounds when they occur close to the sensor.
Table 6: Remote sensor felling sounds.
Sounds
of
felling
Non-
logging
sounds
Correctly
iden-
tified
felling
sounds
Non-logging
sounds
correctly
identified
350 100 280 85
Total of sounds 450
Effectiveness on Stage
Accuracy 83%
Precision 92%
Recall 82%
The model showed 81% effectiveness in this sce-
nario, indicating a lower ability to detect logging
sounds when they occur at greater distances from the
sensor, with greater interference from ambient noise.
Comparison of Results.
The comparison between the scenarios showed
that the effectiveness of the model decreases with dis-
tance and environmental noise interference. In Sce-
nario 1, with logging sounds at a distance of 60 to
120 meters, the model showed an accuracy of 93%. In
Scenario 2, with logging sounds at a distance of 130
to 310 meters, the accuracy was 82%. These results
indicate that the proximity of the sensor to the sound
sources significantly improves the accuracy and ef-
fectiveness of the model in detecting illegal logging
activities.
Table 7: Manual monitoring vs. monitoring with sensors.
Week Manual
Moni-
toring
Personal
Interven-
tion
Monitoring
with Sen-
sors
Week
01
130 2 117
Week
02
120 3 96
Week
03
140 2 127
Week
04
100 2 97
Week
05
135 3 123
Total
trees
lost
625 12 560
Average 125.00 112.00
Result ((MM-MS) /MM) * 100% = 10%
Model for Detecting Illegal Tree Felling in the Protected Area of Bagua in Amazonas Using Convolutional Neural Networks
247

The comparison between both methods showed
a notable improvement in monitoring accuracy when
using sensors. In addition, a 10% decrease in illegal
logging was observed with the implementation of the
sensor system. This shows that we achieved greater
efficiency in detecting illegal logging. Early detection
and immediate notifications allowed for faster actions
to be taken to prevent and mitigate illegal logging, re-
sulting in an effective reduction in the number of trees
cut down.
6 CONCLUSIONS AND FUTURE
WORK
The illegal logging detection model allowed us to
identify illegal logging activities with a high accu-
racy of 90%, resulting in a 10% reduction in these
activities in real-time by detecting chainsaw sounds.
The experimental results indicated that the Convolu-
tional Neural Network (CNN) algorithm offers bet-
ter performance and higher effectiveness compared to
other methods. The research focused on identifying
chainsaw sounds during logging activities in the for-
est. The experimental validation was carried out using
a Huawei P SMART 2019 mobile device to record and
send the audios to the detection model. The model
was evaluated with different sounds at close distances
of 10 meters and far distances of 110 meters, ob-
taining positive and acceptable results, with an illegal
logging detection accuracy ranging between 80% and
90%.
As future work, it is recommended to implement
this model in other municipalities in the Amazonas
region, such as Chachapoyas, Utcubamba, and Con-
dorcanqui, to expand the use of the application and
strengthen forest protection. In addition, the integra-
tion of more sophisticated smart sensors, such as the
AR854, is suggested to cover a larger area and achieve
a more precise analysis of results. Collaboration with
local governments and environmental organizations
will be crucial for the success and sustainability of
these initiatives. In particular, efforts should be fo-
cused on critical points such as Chachapoyas where
illegal logging is most prevalent, to maximize the im-
pact of protection measures.
ACKNOWLEDGEMENTS
We would like to express our gratitude to the Re-
search Department of the Peruvian University of Ap-
plied Sciences for all the support provided throughout
the research and development process of this work.
REFERENCES
Al-Obaidi, A. P. D. A. S. M. (2017). Edu.my. Available:
http://jestec.taylors.edu.my/V12Issue2.htm.
Antonelli, A., Dhanjal-Adams, K. L., and Silvestro, D.
(2023). Integrating machine learning, remote sensing
and citizen science to create an early warning system
for biodiversity. Plants, People, Planet, 5:307–316.
Ball, J. G. C., Petrova, K., Coomes, D. A., and Flaxman, S.
(2022). Using deep convolutional neural networks to
forecast spatial patterns of amazonian deforestation.
Methods in Ecology and Evolution, 13:2622–2634.
Bogomolov, A. R. (2021). Monitoring and diagnostics
of forest condition using sound sensors and artificial
intelligence technologies. IOP Conference Series,
678(1):012005.
Casallas, A. (2022). Design of a forest fire early alert system
through a deep 3d-cnn. Available: https://www.mdpi
.com/1424-8220/22/22/8790.
D. H., . e. P. P. d. U. M. d. J. (2022). Prevenir amazon
´
ıa.
Available:https://preveniramazonia.pe/nuevo-estudio
-tala-ilegal-amazonia-peruana/ [Accessed: 12-Apr-
2024].
Doblas, J., Shimabukuro, Y., Sant’Anna, S., Carneiro, A.,
Arag
˜
ao, L., and Almeida, C. (2020). Optimizing
near real-time detection of deforestation on tropical
rainforests using sentinel-1 data. Remote Sensing,
12:3922.
Dominguez, D., Villar, L. P. D., Pantoja, O., and Gonz
´
alez,
M. (2022). Forecasting amazon rain-forest deforesta-
tion using a hybrid machine learning model. Sustain-
ability, 14(2):691.
Dong, Q., Liu, Y., and Liu, X. (2023). Drone sound de-
tection system based on feature result-level fusion us-
ing deep learning. Multimedia Tools and Applications,
82:149–171.
GEOBOSQUE (2017). P
´
erdida de bosque. Available: https:
//geobosques.minam.gob.pe/geobosque/view/acerca.
php.
Georreferenciada, R. A. D. I. S. (2018). La amazon
´
ıa saque-
ada. Available: https://mineriailegal.amazoniasocioa
mbiental.org/ [Accessed: 12-Apr-2024].
Hethcoat, M. G., Carreiras, J. M. B., Edwards, D. P., Bryant,
R. G., and Quegan, S. (2021). Detecting tropical se-
lective logging with c-band sar data may require a
time series approach. Remote Sensing of Environment,
259:112411.
Kim, J., Min, K., Jung, M., and Chi, S. (2020). Occu-
pant behavior monitoring and emergency event detec-
tion in single-person households using deep learning-
based sound recognition. Building and Environment,
181:107092.
Kitchenham, S. M. C. B. (2007). Guidelines for performing
systematic literature reviews in software engineering.
https://www.researchgate.net/publication/302924724
WEBIST 2024 - 20th International Conference on Web Information Systems and Technologies
248

Guidelines for performing Systematic Literature R
eviews in Software Engineering.
Kumar, M. A. (2022). Solar operated iot based smart system
to monitor illegal logging. Available: https://ieeexplo
re.upc.elogim.com/document/9835935.
Liao, J., Li, H., Feng, A., Wu, X., Luo, Y., Duan, X., Ni,
M., and Li, J. (2022). Domestic pig sound classifi-
cation based on transformercnn. Applied Intelligence,
53:4907–4923.
Marmaroli, P., Allado, M., and Boulandet, R. (2023). To-
wards the detection and classification of indoor events
using a loudspeaker. Applied Acoustics, 202:109161.
Mayfield, H. J., Smith, C., Gallagher, M., and Hockings, M.
(2020). Considerations for selecting a machine learn-
ing technique for predicting deforestation. Science Di-
rect, 131:104741.
Praeli, Y. S. (2021). Noticias ambientales. Available: https:
//es.mongabay.com/2021/10/peru-aumenta-deforesta
cion-cifras-bosques/ [Accessed: 10-Oct-2021].
Romero, H. O. T. (2017). Elperuano.pe. editora peru. Avail-
able: https://www.elperuano.pe/noticia/201717-aum
enta- la- perdida-de-bosque- en- el- peru [Accessed:
12-Apr-2024].
S., M. M. (2022). Smart solar powered system for unautho-
rized logging. Available: https://ieeexplore.upc.elogi
m.com/document/10134127.
Saha, S., Bhattacharjee, S., Shit, P. K., Sengupta, N., and
Bera, B. (2022). Deforestation probability assessment
using integrated machine learning algorithms of east-
ern himalayan foothills (india). Resources, Conserva-
tion & Recycling Advances, 14:200077.
Sboui, T., Saidi, S., and Lakti, A. (2023). A machine-
learning-based approach to predict deforestation re-
lated to oil palm: Conceptual framework and exper-
imental evaluation. Applied Sciences (Basel, Switzer-
land), 13:1772.
Sethi, S. S., Jones, N. S., Fulcher, B. D., Picinali, L., Clink,
D. J., Klinck, H., Orme, C. D. L., Wrege, P. H., and
Ewers, R. M. (2020). Characterizing soundscapes
across diverse ecosystems using a universal acoustic
feature set. Proceedings of the National Academy of
Sciences of the United States of America, 117:17049–
17055.
Simiyu, D. and Vikiru, A. (2017). A chainsaw-sound recog-
nition model for detecting illegal logging activities in
forests. Available: https://www.researchgate.net/pub
lication/323281289 TreeSpirit Illegal logging detec
tion and alerting system using audio identificatio
n over an IoT network.
Watanabe, M., Koyama, C. N., Hayashi, M., Nagatani, I.,
Tadono, T., and Shimada, M. (2021). Refined al-
gorithm for forest early warning system with alos-
2/palsar-2 scansar data in tropical forest regions. Re-
mote Sensing of Environment, 265:112643.
Watch, G. F. (2023). Perdida de bosques en per
´
u. Available:
https://www.globalforestwatch.org/dashboards/count
ry/PER/?
Model for Detecting Illegal Tree Felling in the Protected Area of Bagua in Amazonas Using Convolutional Neural Networks
249
