
Using Shapley Additive Explanations to Explain a Deep Reinforcement
Learning Agent Controlling a Turtlebot3 for Autonomous Navigation
Sindre Benjamin Remman
a
and Anastasios M. Lekkas
b
Department of Engineering Cybernetics, Norwegian University of Science and Technology (NTNU), Trondheim, Norway
Keywords:
Explainable AI, Deep Reinforcement Learning, Shapley Additive Explanations, LiDAR Data.
Abstract:
We employ Shapley Additive Explanations (SHAP) to interpret a DRL agent’s decisions, trained using the
Soft-Actor Critic algorithm for controlling a TurtleBot3 via LiDAR in a simulated environment. To leverage
spatial correlations between laser data points, we use a neural network with a convolutional first layer to
extract features, followed by feedforward layers to choose actions based on these extracted features. We use
the Gazebo simulator and Robotic Operating System (ROS) to simulate and control the TurtleBot3, and we
implement visualization of the calculated SHAP values using rviz, coloring the LiDAR states based on their
SHAP values. Our contributions are as follows: (1) To our knowledge, this is the first research paper using
the SHAP method to explain the decision-making of a DRL agent controlling a mobile robot using LiDAR
data states. (2) We introduce a visualization approach by clustering LiDAR data points using Density-based
spatial clustering of applications with noise (DBSCAN) and visualizing the average SHAP values for each
cluster to improve interpretability. Our results show that although the agent often makes decisions based on
human-interpretable information, such as an obstacle on the left necessitating a right turn and vice versa, the
agent has also learned to use information that is not human-interpretable. We hypothesize and discuss if this
indicates the policy is overfitted to the map used for gathering data.
1 INTRODUCTION
Recent developments in deep reinforcement learning
(DRL) have demonstrated remarkable performance
across diverse domains, ranging from video games
(Badia et al., 2020) to robotic control (Brunke et al.,
2022). However, understanding the decision-making
of DRL agents remains a significant challenge due to
their neural network-based policies. This lack of in-
terpretability impedes the diagnosis and improvement
of agent performance in control tasks, particularly in
safety-critical applications.
To tackle the interpretability challenges of DRL
agents, researchers in Explainable Artificial Intelli-
gence (XAI) have developed various methods to en-
hance the explainability of DRL models. Such meth-
ods can offer insights into the DRL models’ decision-
making processes and lead to improved performance,
better debugging, and increased trust in these systems.
One widely used method in the XAI community is
Shapley Additive Explanations (SHAP), which is a
a
https://orcid.org/0009-0005-7593-5913
b
https://orcid.org/0000-0001-6885-6372
feature attribution method. This type of method aims
to determine the contribution of each input feature to
the output made by an machine learning (ML) model.
SHAP is especially popular due to its strong theo-
retical foundation in cooperative game theory, which
guarantees fair and consistent distribution of feature
importance. This foundation allows SHAP to satisfy
certain properties, such as
• Local Accuracy. The explanation model’s pre-
diction should match the original model’s predic-
tion for any given instance.
• Missingness. Features not present in the model
should have no attributed importance.
• Consistency. If a model changes so that it relies
more on a feature, the SHAP value for that feature
should not decrease.
These properties set SHAP apart from other feature
attribution methods, making it a robust and reliable
tool for interpretability.
In this paper, we employ SHAP to explain a DRL
agent trained with the Soft Actor-Critic (SAC) algo-
rithm to control a TurtleBot3 for autonomous navi-
gation. The TurtleBot3 operates in a simulated in-
334
Remman, S. B. and Lekkas, A. M.
Using Shapley Additive Explanations to Explain a Deep Reinforcement Learning Agent Controlling a Turtlebot3 for Autonomous Navigation.
DOI: 10.5220/0012950200003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 334-340
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

door environment, using a 360° LiDAR sensor to per-
ceive its surroundings and navigate through an obsta-
cle course. While this type of navigation can be ef-
fectively solved with traditional methods, it serves as
a valuable test environment for our purposes. Dur-
ing future work, we can easily apply the policy to a
real Turtlebot3 because of its safe operation, and later,
we can include complications where DRL offers ad-
vantages, such as dynamic obstacles and humans in
the environment. We visualize the SHAP values of
each LiDAR point state in rviz by coloring the Li-
DAR readings by their SHAP value. Specifically, the
contributions of this paper are:
• To our knowledge, this is the first research paper
using SHAP to explain the decision-making of a
DRL agent controlling a mobile robot using Li-
DAR data states.
• We show how feature attributions for LiDAR data
features, such as ones generated by SHAP, can be
visualized in rviz by coloring the LiDAR points
by their SHAP value. To improve the visualiza-
tion, we cluster the laser data using DBSCAN and
visualize each cluster’s average SHAP values.
1.1 Related Work
Work has already been done on using the TurtleBot3
to navigate environments using DRL. The authors in
(Cimurs et al., 2022) use DRL for local navigation
to move between waypoints toward a global goal in
an unknown environment. The waypoints are gen-
erated through a global navigation scheme based on
a map that is continuously updated using simultane-
ous localization and mapping (SLAM). This approach
is similar to ours, although we do not implement a
higher-level global navigation scheme. Instead, we
assign a randomly selected goal waypoint for each
episode. The way we use SHAP to explain the DRL
policy could easily be adapted to the approach in
(Cimurs et al., 2022).
Although there has not been much work done on
using feature attributions to explain DRL agents with
LiDAR data states, there has been significant work
on feature attribution methods for explaining DRL
agents with other types of state spaces. In (Gjærum
et al., 2023), the authors use model trees as surro-
gate models to create feature attributions explaining
a DRL agent. The authors in (Remman et al., 2022)
compare two variants of SHAP, Kernel SHAP and
Causal SHAP on a robotic DRL task involving ma-
nipulating a lever using a robotic manipulator. In
(Bellotti et al., 2023), the authors propose a frame-
work to interpret the behavior of DRL agents in a
highway simulation environment using three types of
analysis: episode timeline, frame-by-frame, and ag-
gregated statistical analysis. The authors used SHAP
and attention mechanisms to understand the agents’
decision-making process.
2 PRELIMINARIES
2.1 Shapley Additive Explanations
Shapley Additive Explanations (SHAP), which was
introduced in (Lundberg and Lee, 2017), is a feature-
attribution method, which means that it explains how
much each input to an ML model contributes to the
output of the model. SHAP has its roots in coopera-
tive game theory and is based on the Shapley decom-
position, introduced by Lloyd Shapley in 1953 (Shap-
ley, 1952). This decomposition fairly assigns parts of
the outcome of a game to the game’s players based
on their contribution to the game’s outcome. In the
context of SHAP, these ”players” are the input fea-
tures, and the game’s outcome is the output of the ML
model. The Shapley value ensures a fair distribution
of contributions by representing the average marginal
contribution of each feature across all possible coali-
tions of features (Molnar, 2022):
φ
i
=
∑
S⊆N\{i}
|S|!(|N|−|S|−1)!
|N|!
[ f (S ∪{i}) − f (S)]
(1)
Here, φ
i
represents the Shapley value for feature i,
N is the set of all features, S is a subset of N excluding
i, and f is the model’s prediction function. This for-
mula considers all possible subsets S, making SHAP
values computationally intensive to calculate exactly.
In addition, it is generally impossible to evaluate neu-
ral network models with missing features.
Several approximation methods have been devel-
oped to make SHAP values feasible for real-world
applications. Among them, Deep SHAP and Kernel
SHAP are widely used:
• Deep SHAP is tailored for deep learning mod-
els and leverages neural network structure to ef-
ficiently approximate SHAP values.
• Kernel SHAP is a model-agnostic method that
approximates SHAP values using a weighted lin-
ear regression model, suitable for any machine
learning model.
Deep SHAP generates explanations much faster than
Kernel SHAP by leveraging neural network-specific
features, such as backpropagation and GPU accelera-
tion. Our experiments, therefore, used Deep SHAP to
generate the explanations.
Using Shapley Additive Explanations to Explain a Deep Reinforcement Learning Agent Controlling a Turtlebot3 for Autonomous
Navigation
335
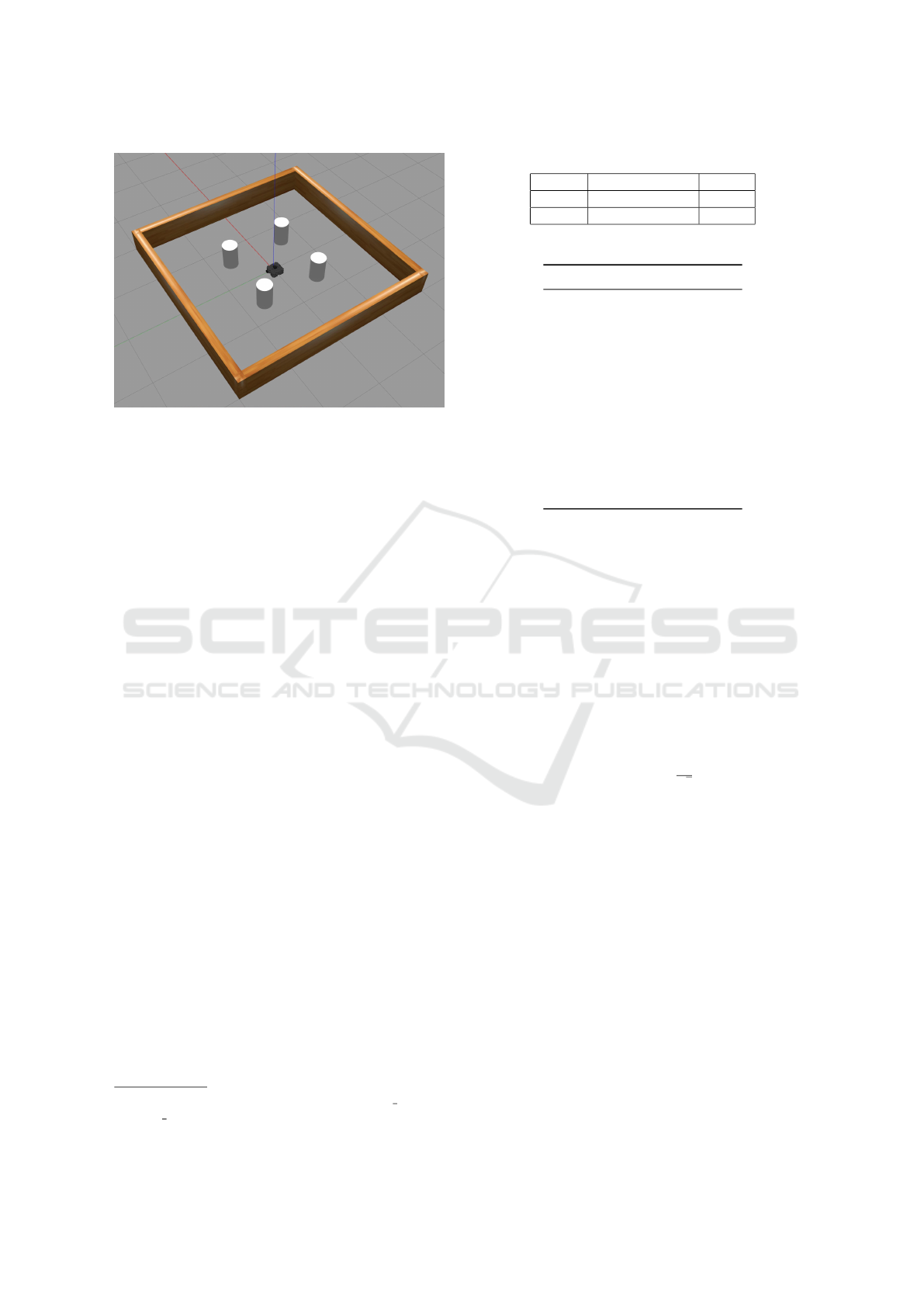
Figure 1: The second environment from the TurtleBot3 ma-
chine learning package.
3 METHODOLOGY
3.1 Experimental Setup
We train the SAC policy in the Gazebo simulator
(Koenig and Howard, 2004) and control the simu-
lated robot using ROS commands (Quigley et al.,
2009). We base the implementation of our reinforce-
ment learning environment on the TurtleBot3 ma-
chine learning package
1
. This implementation uses a
discrete action space and some redundant information
in the state space, such as the angle and distance to the
nearest obstacle. This information is already a part of
the LiDAR reading states. The robot also always has a
0.15 m/s linear velocity, and only the angular velocity
is controlled using the actions.
We adapt the implementation to better suit our
purposes by changing both the state space, action
space, and reward function. These changes are de-
tailed below, in Section 3.2. The map on which we
base our experiments is the second environment of
the TurtleBot3 machine learning package, which is
shown in the Gazebo simulator in Figure 1. This
environment has four columns spaced symmetrically
around the center and four walls encasing the envi-
ronment. The TurtleBot3 starts every episode in the
middle of the environment, as in Figure 1.
3.2 Problem Formulation and Solution
The reinforcement learning (RL) problem we address
is navigating the TurtleBot3 from the center of the en-
vironment shown in Figure 1 to a randomly selected
1
https://github.com/ROBOTIS-GIT/turtlebot3
machine learning.git
Table 1: Definition of actions and their respective ranges.
Action Description Range
a
1
Linear velocity [−1, 1]
a
2
Angular velocity [−1, 1]
Table 2: The hyperparameters used for SAC.
Hyperparameter Description
Learning Rate 0.0003
Gamma 0.99
Batch Size 256
Replay Buffer Size 1000000
Entropy Coefficient auto
Update Interval 1
Gradient Steps 1
Training Time Steps 1000000
Optimizer Adam
Conv1d Filters 1
Conv1d Kernel Size 20
Conv1d Stride 5
Conv1d Padding 5
position within the outer walls. The state space S con-
sists of 180 readings from the TurtleBot3’s 360° Li-
DAR, as well as two states with the distance to the
goal and the angle from the heading direction to the
goal position, represented as a 182-dimensional vec-
tor of continuous values s ∈ S .
The action space A is continuous, with each ac-
tion a ∈ A consisting of two entries, as defined in Ta-
ble 1. In this case, a negative angular velocity makes
the TurtleBot3 turn towards its right. We define our
reward function as follows:
R(s, a) =
200 if goal reached
−200 if collision
−(distance to goal)
3
√
2
otherwise
,
which we found to work well through trial and error.
To solve this environment, we train our policy us-
ing the Stable-Baselines3 implementation of the SAC
algorithm (Raffin et al., 2021) (Haarnoja et al., 2018).
The hyperparameters used for training the policy are
shown in Table 2.
3.3 SHAP Explanation and
Visualization
To better understand how the agent solves the RL en-
vironment, we employ SHAP. We use the SHAP ex-
plainer to compute SHAP values from the inputs to
the policy (LiDAR data and the distance and heading
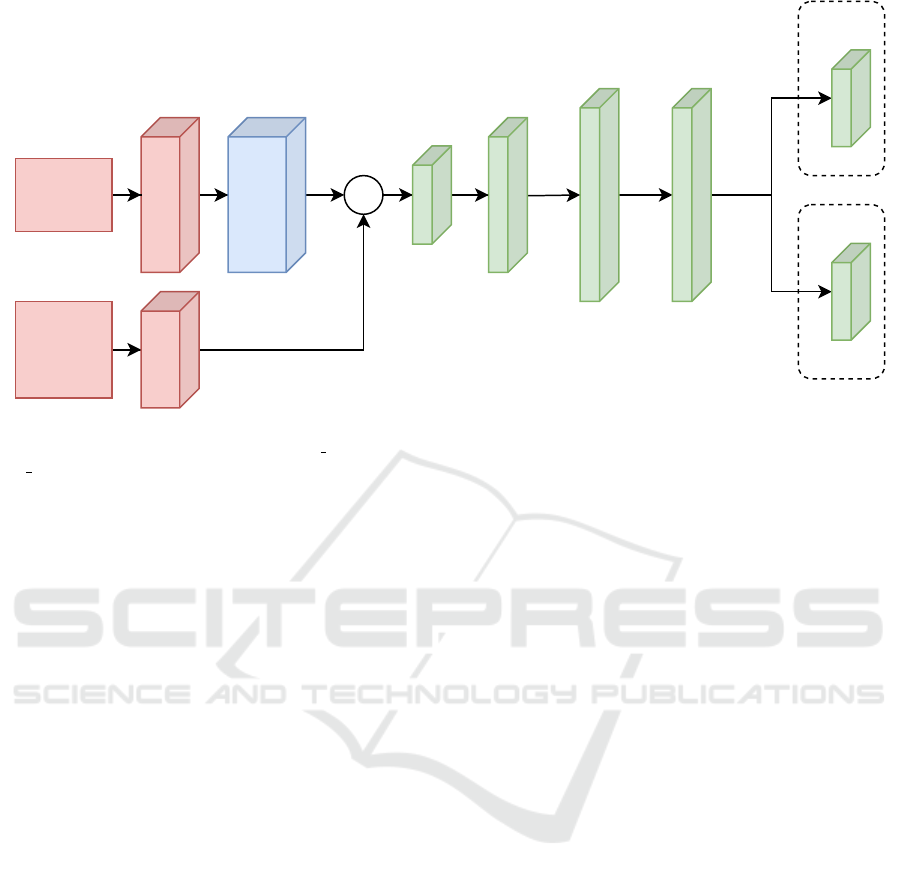
to the goal) to the mean action chosen by the policy.
This action is obtained by applying the Tanh activa-
tion function after the µ layer, as shown in Figure 2.
We are primarily interested in understanding how the
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
336
Input |180
FC|256
FC|128
Conv1d
LiDAR
Data
Goal
distance
and angle
Input |2
+
FC|37
FC|256
μ
FC|2
log_std
FC|2
Figure 2: This figure shows the SAC actor network used. After the Conv1d layer and all fully connected (FC) layers except
the two last FC layers marked by µ and log std, there are rectified linear unit (ReLU) activation functions. After the µ and
log
std layers, there are hyperbolic tangent (Tanh) activation functions.
LiDAR states contribute to the actions chosen by the
policy. To visualize this, we overlap the SHAP val-
ues with the LiDAR readings, coloring them blue for
negative SHAP values and red for positive ones. The
more deeply they are colored, the greater the mag-
nitude of the SHAP value. Negative SHAP values
decrease the model output, while positive values in-
crease it. In our case, negative SHAP values con-
tribute to more negative actions: for Action 1, this
means a more negative linear velocity, and for Action
2, a more negative angular velocity. We display this
visualization in rviz by publishing the colored LiDAR
readings on a ROS topic as Marker messages. An ex-
ample of this visualization can be seen in Figure 3.
To generate new SHAP values in as close to real-
time as possible, we use Deep SHAP from the SHAP
Python library. In contrast to the widely used Ker-
nel SHAP, Deep SHAP can generate much faster. In
our experiments, we could generate SHAP explana-
tions using Deep SHAP at an average rate of 14.533
Hz, while Kernel SHAP generated explanations at an
average rate of 0.444 Hz.
To make the visualization of the SHAP values
more suitable for real-time examination, we used
density-based clustering to group the LiDAR data
points and subsequently visualize the average SHAP
value for each of these clusters. This approach was
chosen to address the noise present in the SHAP val-
ues, which made them challenging to interpret. For
the clustering, we used the DBSCAN method to clus-
ter together dense regions of LiDAR points (Ester
et al., 1996).
4 RESULTS AND DISCUSSION
In the first part of this section, we discuss how apply-
ing SHAP to our RL problem yields results that align
with human intuition. For example, LiDAR readings
corresponding to nearby obstacles contribute to ac-
tions that move the TurtleBot3 away from those ob-
stacles. Next, we discuss how the policy has learned
to look at parts of the LiDAR readings that are not
necessarily human-understandable. Finally, because
of the at times noisy SHAP values, we implement a
density-based clustering scheme using DBSCAN to
simplify the visualization.
4.1 Human-Interpretable SHAP Values
When the TurtleBot3 has to move close to or towards
an obstacle to reach its goal, the LiDAR readings cor-
responding to that obstacle are often given SHAP val-
ues, which indicate that these readings tell the pol-
icy to keep away from them. From Figure 3, we can
see this is the case when the goal is located between
and beyond two of the columns in the environment.
This plot shows the SHAP values for action 2, which,
as discussed in Section 3.2, is the action that sends
an angular velocity command to the TurtleBot3. The
left-forward column is mainly colored blue, which
indicates that this column contributes to decreasing
action 2, which, in return, makes the angular veloc-
ity command more negative. Compare this to the
right-forward column, which is primarily colored red.
These SHAP values indicate that the policy uses the
Using Shapley Additive Explanations to Explain a Deep Reinforcement Learning Agent Controlling a Turtlebot3 for Autonomous
Navigation
337
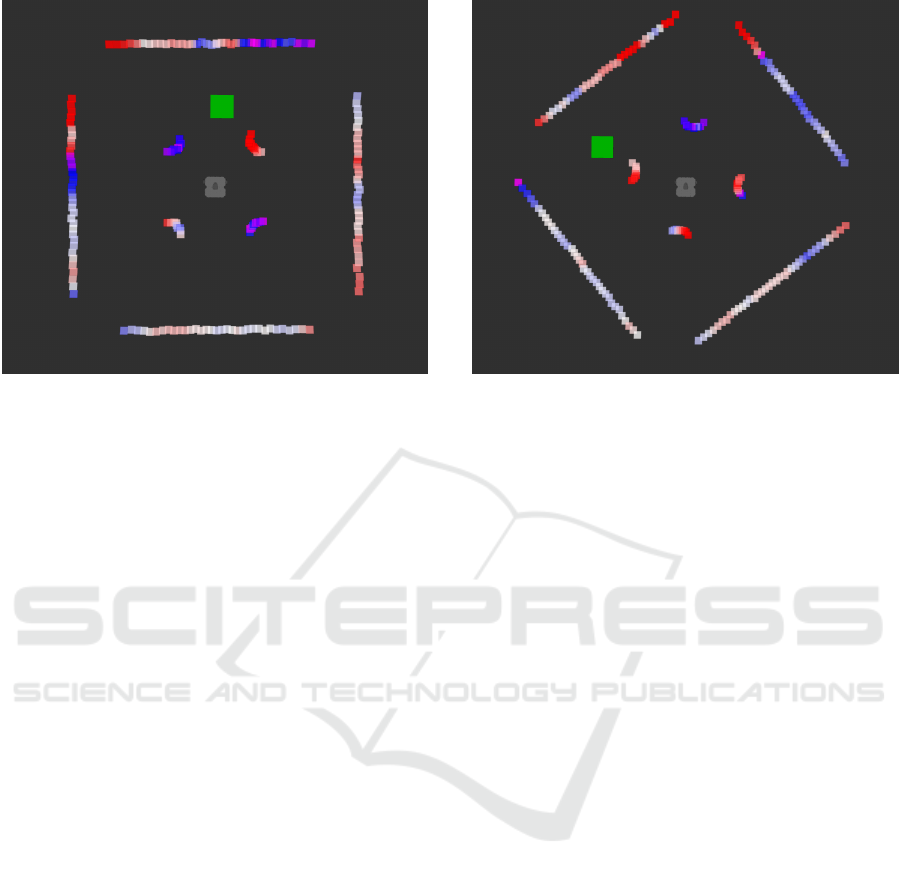
Figure 3: The rviz visualization shows the SHAP values for
Action 2 as the TurtleBot3 moves between the columns to-
ward the goal (represented by the green square), with the
TurtleBot3 positioned at the center of the image. The image
is oriented along the forward direction of the TurtleBot3.
Note that the corners of the outer walls appear missing
because the four columns obstruct the TurtleBot3’s view,
and the LiDAR only detects objects directly visible along
straight lines from its position.
LiDAR readings from these two columns to navigate
between them as we should expect, with the result be-
ing that the TurtleBot3 successfully moves towards
the goal.
A similar behavior is observed when the policy
has to turn the TurtleBot3 towards the goal when the
goal is currently located behind the TurtleBot3. Fig-
ure 4 shows the SHAP values for action 1, and the col-
umn straight ahead of the TurtleBot3 is colored blue,
which indicates that the policy uses the fact that there
is an obstacle straight ahead to make the linear veloc-
ity more negative.
4.2 Non-interpretable SHAP Values
Although we are, to some extent, able to interpret
some of the SHAP values in a way that makes sense
to a human, there are other situations where that is
difficult. For both Figure 3 and Figure 4 discussed
above, the walls around the environment have what
seems to be quite noisy SHAP values. We can also
see the same in Figure 5, where the SHAP values
seem quite random and have a large magnitude for
the LiDAR readings at the walls for a single time step
at the beginning of each episode. To a human, these
SHAP values do not easily make sense. However, the
SHAP values indicate that these LiDAR readings are
important for the policy to navigate the environment.
We want to suggest that, since the policy uses the Li-
Figure 4: A visualization of the SHAP values for action 1
when TurtleBot3 is turning towards the goal behind it. Note
that the turtlebot3 is rotated approximately 45
◦
compared
to Figure 3 and that the visualizations are oriented with the
turtlebot3’s forward direction upwards, leading the environ-
ment to look rotated.
DAR readings from walls far away to navigate the en-
vironment, it is overfitting to the environment. We
hypothesize that the policy has memorized this par-
ticular environment and, in that way, knows how to
navigate it. If the policy used the LiDAR data for
obstacle avoidance instead, we would expect that the
closest obstacles would consistently have the largest
SHAP values. It is indeed quite likely that the pol-
icy has memorized the environment and thus is over-
fitted to the environment since we have only trained
the policy using this environment. The authors in
(Cobbe et al., 2019) demonstrate how maze-solving
DRL agents can overfit to the training data even when
there are a remarkable number of different mazes in
the training data. Even though this is not directly ap-
plicable to our problem, it demonstrates the signifi-
cant memorization capabilities of DRL agents, which
could indicate a likely overfitting in our agent as well.
Another problem is that the SHAP values can
change drastically between each time step. This could
make it very difficult to interpret the SHAP values if
they are used to examine the system in real time.
4.3 Density-Based Clustering of SHAP
LiDAR Data
We will now look at the results from using the clus-
tering scheme described in Section 3.3 to condense
down the information in the SHAP visualizations
shown so far in the paper. Figure 6 shows the same
situation as in Figure 3, however with SHAP values
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
338
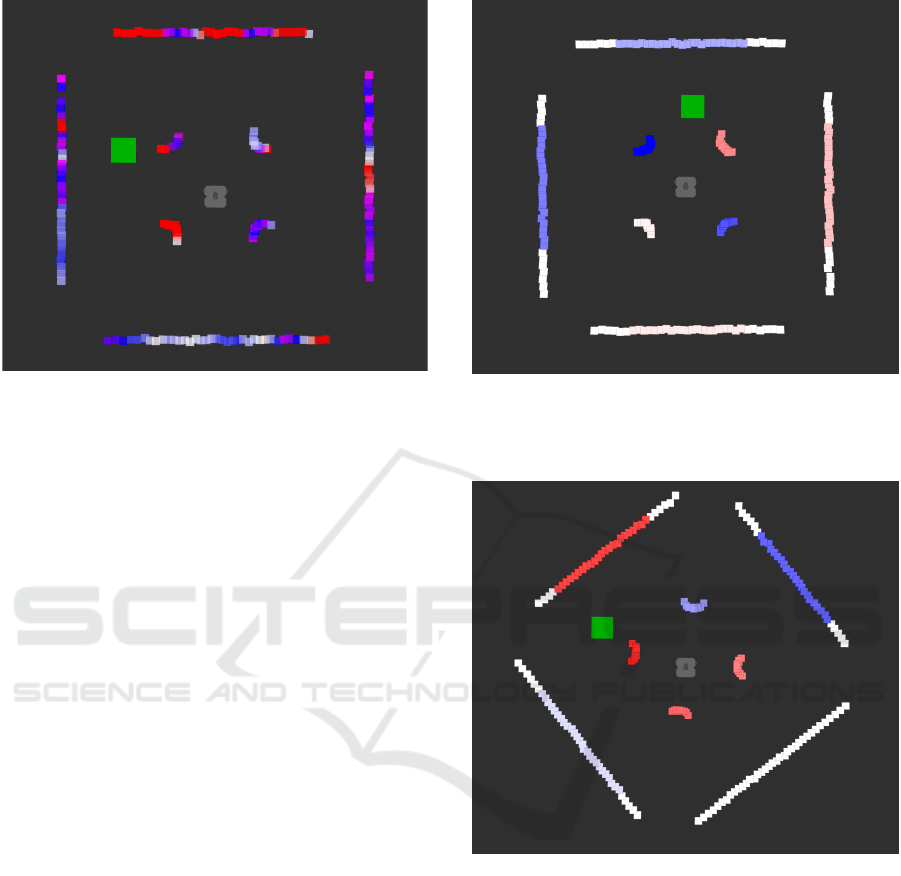
Figure 5: A visualization of the SHAP values for action
1 for the initial time step in an episode. This seemingly
random assignment of SHAP values with large magnitudes
to many LiDAR readings is consistent for the first time step
in all episodes.
averaged across the clusters. We see the same ten-
dency with the left-forward column being blue and
the right-forward column being red, but with the clus-
tering scheme, it is much easier to read the visualiza-
tion. The SHAP values for the wall LiDAR readings
are also smoothed out. Figure 7 shows the same situa-
tion as Figure 4 after applying the clustering scheme.
Again, we see the same tendencies we discussed for
Figure 4. Finally, Figure 8 shows the same situation
as Figure 5 after applying the clustering scheme. This
plot looks much tidier now, and the clustering scheme
could, therefore, hide some of the complexity in the
agent’s decision-making. However, one would likely
need to create a balance between explanations that are
completely faithful to the model’s decision-making
and human-interpretable explanations.
5 CONCLUSION
In this paper, we have demonstrated the use of Shap-
ley Additive Explanations (SHAP) to interpret the
decision-making process of a DRL agent trained with
the SAC algorithm. The agent navigated a TurtleBot3
with a 360° LiDAR sensor through a simple obstacle
course in a simulated environment. By employing a
neural network with a convolutional layer to process
the LiDAR data, we aimed to leverage spatial correla-
tions between laser data points to improve navigation
performance.
Our results show that SHAP can provide valu-
able insights into the behavior of the DRL agent. We
Figure 6: This figure shows the same situation as in Fig-
ure 3, with the difference being that we instead show the
average SHAP values for each cluster of LiDAR points we
have found using DBSCAN.
Figure 7: This figure shows the same situation as in Fig-
ure 4, but after applying our SHAP value clustering scheme.
observed that the agent often made decisions based
on human-interpretable information, such as avoid-
ing obstacles detected by the LiDAR. However, there
were instances where the agent utilized non-intuitive
information, potentially indicating overfitting to the
specific training environment.
To visualize the SHAP values, we used them to
color a visualization of the LiDAR readings, showing
each reading’s contribution to the agent’s actions. To
address the noisy nature of SHAP values and their,
at times, drastic changes between time steps, we im-
plemented a density-based clustering approach using
DBSCAN. This clustering helped smooth the SHAP
visualizations, making them more interpretable for
Using Shapley Additive Explanations to Explain a Deep Reinforcement Learning Agent Controlling a Turtlebot3 for Autonomous
Navigation
339

Figure 8: This figure shows the same situation as in Fig-
ure 5, but after applying our SHAP value clustering scheme.
real-time analysis.
Further work could, for instance, include under-
standing the reasons behind the high variability of the
SHAP values for minor changes in input data in this
environment. Another interesting possible future re-
search direction could be to see whether techniques
for reducing overfitting and improving generalization,
such as the domain randomization introduced in (To-
bin et al., 2017), could make the neural network pol-
icy prioritize obstacle avoidance instead of just rec-
ognizing its environment and in return changing the
SHAP values to a more human-interpretable distribu-
tion.
Overall, our findings suggest that while SHAP can
enhance the transparency of DRL agents, there are
still challenges in ensuring the interpretability of these
explanations.
ACKNOWLEDGEMENTS
The Research Council of Norway supported this
work through the EXAIGON project, project number
304843.
REFERENCES
Badia, A. P., Piot, B., Kapturowski, S., Sprechmann, P.,
Vitvitskyi, A., Guo, Z. D., and Blundell, C. (2020).
Agent57: Outperforming the atari human bench-
mark. In International conference on machine learn-
ing, pages 507–517. PMLR.
Bellotti, F., Lazzaroni, L., Capello, A., Cossu, M., De Glo-
ria, A., and Berta, R. (2023). Explaining a deep
reinforcement learning (DRL)-based automated driv-
ing agent in highway simulations. IEEE Access,
11:28522–28550.
Brunke, L., Greeff, M., Hall, A. W., Yuan, Z., Zhou, S.,
Panerati, J., and Schoellig, A. P. (2022). Safe learn-
ing in robotics: From learning-based control to safe
reinforcement learning. Annual Review of Control,
Robotics, and Autonomous Systems, 5:411–444.
Cimurs, R., Suh, I. H., and Lee, J. H. (2022). Goal-driven
autonomous exploration through deep reinforcement
learning. IEEE Robotics and Automation Letters,
7(2):730–737.
Cobbe, K., Klimov, O., Hesse, C., Kim, T., and Schul-
man, J. (2019). Quantifying generalization in rein-
forcement learning. In International conference on
machine learning, pages 1282–1289. PMLR.
Ester, M., Kriegel, H.-P., Sander, J., Xu, X., et al. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In kdd, volume 96,
pages 226–231.
Gjærum, V. B., Str
¨
umke, I., Løver, J., Miller, T., and
Lekkas, A. M. (2023). Model tree methods for ex-
plaining deep reinforcement learning agents in real-
time robotic applications. Neurocomputing, 515:133–
144.
Haarnoja, T., Zhou, A., Hartikainen, K., Tucker, G., Ha, S.,
Tan, J., Kumar, V., Zhu, H., Gupta, A., Abbeel, P.,
et al. (2018). Soft actor-critic algorithms and applica-
tions. arXiv preprint arXiv:1812.05905.
Koenig, N. and Howard, A. (2004). Design and use
paradigms for gazebo, an open-source multi-robot
simulator. In Proceedings of the IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), volume 3, pages 2149–2154. IEEE.
Lundberg, S. M. and Lee, S.-I. (2017). A unified approach
to interpreting model predictions. Advances in neural
information processing systems, 30.
Molnar, C. (2022). Interpretable Machine Learning. 2 edi-
tion.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
Raffin, A., Hill, A., Gleave, A., Kanervisto, A., Ernes-
tus, M., and Dormann, N. (2021). Stable-baselines3:
Reliable reinforcement learning implementations. J.
Mach. Learn. Res., 22(268):1–8.
Remman, S. B., Str
¨
umke, I., and Lekkas, A. M. (2022).
Causal versus marginal shapley values for robotic
lever manipulation controlled using deep reinforce-
ment learning. In 2022 American Control Conference
(ACC), pages 2683–2690. IEEE.
Shapley, L. S. (1952). A VALUE FOR N-PERSON GAMES.
Defense Technical Information Center.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and
Abbeel, P. (2017). Domain randomization for transfer-
ring deep neural networks from simulation to the real
world. In 2017 IEEE/RSJ international conference on
intelligent robots and systems (IROS), pages 23–30.
IEEE.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
340
