
Joint C2f and Joint Loss Object Detection Based on YOLOv5
Jinglin Cao
a
School of Material Science and Engineering, Tongji University, Shanghai, China
Keywords: Object Detection, Complete Union Intersection, YOLOv5, Distributed Focus Loss.
Abstract: Seeking more accurate object detection in densely populated scenes, especially those involving small objects,
is crucial for the development of computer vision applications. This study aims to significantly improve the
detection capability of the YOLOv5 architecture. Specifically, this article proposes a new combination of C2f
modules for enriching feature learning and distributed focus loss with a Complete Union Intersection (CIoU)
loss function for improving object localization and class imbalance handling. Specifically, the C2f module
helps to achieve better gradient propagation within the network, while the Distributed Focus Loss
(DFL)+CIoU loss function improves detection accuracy through advanced boundary box calculations. This
study was conducted on the COCO128 dataset. Its rigorous experimental framework confirms that these
enhancements significantly improve average accuracy, recall, and bounding box accuracy. Experimental
results indicate that the modified YOLOv5 model outperforms the baseline, offering significant improvements
in detecting small-scale objects amidst complex backgrounds. The implications of this study are far-reaching,
providing a foundation for developing real-time detection systems that are more reliable and effective across
varied and challenging visual environments.
1 INTRODUCTION
Object detection, as an integral discipline of computer
vision, has been revolutionized with the introduction
of deep learning technologies. This field focuses on
the identification and localization of objects within
images, serving as the foundation for numerous
applications such as autonomous driving, security
surveillance, and image analysis systems. The
significance of object detection lies not only in its
ability to enhance the interpretability of visual data
but also in its contribution to the advancement of
automated systems that require visual
comprehension. Recent surveys and reviews in this
domain underscore the rapid evolution of
methodologies, particularly highlighting the shift
from traditional approaches to deep learning-based
models such as Region-based Convolutional Neural
Networks (R-CNN), Single Shot Detector (SSD), and
You Only Look Once (YOLO), each presenting
unique solutions to the challenges of accuracy, speed,
and scalability in object detection tasks (Girshick,
2014; Liu, 2016; Redmon, 2016).
a
https://orcid.org/0009-0003-6649-6731
Initially, the R-CNN approach introduced the
concept of region proposals for object detection,
enhancing accuracy but at the cost of computational
efficiency. To address the limitations of R-CNN, such
as speed and scalability, the SSD was developed,
providing a balance between speed and accuracy by
eliminating the need for explicit region proposal steps
and detecting objects in a single pass. Among these
developments, the YOLO framework marked a
significant departure from traditional object detection
methods by integrating the detection process into a
single neural network. This integration not only
improved detection speeds but also maintained
competitive accuracy, making real-time object
detection feasible. The subsequent iterations of
YOLO, namely YOLOv2 and YOLOv3, introduced
incremental improvements aimed at refining
accuracy, speed, and the model's ability to detect
objects of varying sizes (Redmon, 2017; Redmon,
2018). YOLOv2 focused on enhancing the model's
recall and Intersection over Union (IoU) metrics
through techniques such as batch normalization and
high-resolution classifiers. YOLOv3 further
improved upon these enhancements by incorporating
452
Cao, J.
Joint C2f and Joint Loss Object Detection Based on YOLOv5.
DOI: 10.5220/0012950800004508
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024), pages 452-457
ISBN: 978-989-758-713-9
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
multi-scale predictions and a deeper, more complex
network architecture, significantly boosting the
model's performance across a wide range of object
sizes and types.
The main objective of this study is to enhance the
YOLO framework and enhance the detection
accuracy of small objects by introducing new
architectural elements and optimization techniques.
Specifically, this study aims to enhance the feature
extraction capability of YOLO by integrating more
gradient-rich modules and modifying its backbone
architecture. In addition, this study combines the
Distributed Focus Loss (DFL) with the existing
Complete Union Intersection (CIoU) loss function
(Lin, 2017; Zheng, 2021). This method solves the
challenge of precise object detection in complex
visual scenes and helps achieve a broader goal of
improving the reliability and efficiency of automated
systems that rely on visual data. The experimental
results demonstrate the effectiveness of these
modifications, revealing the optimal model
configuration and its impact on detection
performance. In summary, this study not only
advances the technological foundation of object
detection models but also emphasizes their practical
significance in real-world applications and the
necessity for continuous innovation in this field.
2 METHODOLOGIES
2.1 Dataset Description and
Preprocessing
In this research, the COCO128 dataset, a condensed
subset of the extensive Common Objects in Context
(COCO) dataset, was employed. Developed by
Microsoft Research, the COCO dataset is a
significant resource for object detection,
segmentation, and captioning, designed to enhance
scene understanding through diverse and annotated
imagery (Lin, 2014; Misra, 2019). The COCO128
variant comprises 128 selectively chosen images that
span all 80 categories featured in the original COCO
dataset, allowing for rapid prototyping and algorithm
validation. The modification leveraged YOLOv5's
data preprocessing techniques, notably including
image resizing to a dimension of 608x608 pixels,
normalization, and the implementation of Mosaic
data augmentation. These preprocessing measures are
aimed at optimizing the model’s performance,
ensuring enhanced detection accuracy across varying
object sizes and lighting conditions. The utilization of
YOLOv5's adaptive anchor box calculations and
image scaling methods further augmented the model's
efficacy.
2.2 Proposed Approach
This study aims to reimplement and enhance the
YOLOv5 object detection algorithm by introducing
advanced architecture and functional improvements.
The proposed method revolves around the YOLOv5
algorithm architecture. This article revolves around
the backbone and output loss function. This method
replaces the C3 module with a C2f (Sun, 2021)
module rich in gradient flow, optimizes the gradient
length to improve accuracy and efficiency, and
introduces a combination of DFL and CIoU for the
regression loss branch. This method ensures richer
gradient flow and more accurate bounding box
coordinate representation, aiming to achieve higher
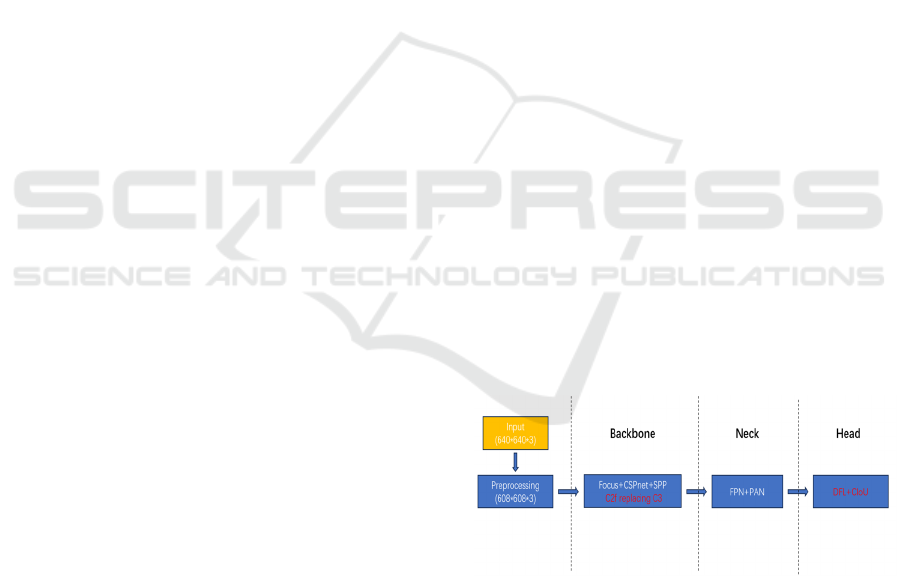
object detection performance. The algorithm design
includes four general modules: input, backbone
network, neck network, and output, each of which is
customized to enhance the detection ability of the
model. The pipeline is shown in Figure 1. Through
meticulous model training and validation processes,
including Mosaic data augmentation and adaptive
anchor box calculations, the proposed approach seeks
to optimize performance across various metrics, such
as mean average precision (mAP), box loss, and F1
score, on the COCO128 dataset over 1000 epochs.
The results underscore the benefits of the
architectural modifications and training strategies,
indicating the superior performance of the enhanced
model compared to the baseline, especially in
scenarios involving complex backgrounds or smaller
objects.
Figure 1: The pipeline of this study
(Photo/Picture credit:
Original).
2.2.1 Baseline
The YOLOv5 model integrates several advanced
architectural techniques to create a robust framework
for object detection. It employs a unique input pre-
processing step called 'Focus' to reduce spatial
dimensions while concatenating feature maps,
Joint C2f and Joint Loss Object Detection Based on YOLOv5
453

preparing the input for subsequent layers. The model
backbone consists of Cross Stage Partial (CSP)
networks, which significantly reduce the
computational cost while maintaining feature
richness by merging partial features from different
stages (Wang, 2020). At the very outset of the
backbone, the YOLOv5 employs a distinctive
“Focus” mechanism. This novel slicing operation
works by splitting the input image into four parts,
thereby reducing the spatial dimensions by half while
increasing the depth dimension fourfold.
Furthermore, the use of the Spatial Pyramid Pooling
(SPP) block enhances the receptive field and assists
in maintaining spatial hierarchies between features at
different scales (He, 2015).
Following the backbone, the YOLOv5 model
leverages a combination of Feature Pyramid Network
(FPN) and Path Aggregation Network (PAN)
structures within its neck (Lin, 2017; Lin, 2018). The
FPN component aggregates features at different
scales, improving the model's ability to detect objects
of various sizes. Simultaneously, the PAN part
enhances the feature hierarchy by allowing lower-
level features to be upsampled and integrated with
higher-level ones. The model's head is equipped with
convolutional layers that produce final detection
predictions, including bounding box coordinates and
class probabilities. YOLOv5 uses the “Convolution,
Batch Normalization and Leaky ReLU” (CBL)
structure throughout its layers, promoting non-linear
feature transformation and normalization, which
stabilizes training and accelerates convergence.
Additionally, the model employs skip connections
and upsampling, which ensures that the granularity of
the spatial information is preserved throughout the
network.
In this study’s framework, the YOLOv5 model
serves as the foundation for comparing various
improvements. The model is set up using pre-defined
hyperparameters and trained on a standard dataset to
establish a baseline for object detection performance.
This baseline model is pivotal for subsequent
experimental iterations where modifications are
incrementally introduced to assess their impact on the
model's efficiency and accuracy.
2.2.2 C2f Module
The C2f module, central to the enhanced YOLOv5
architecture, is an innovative adaptation of the
conventional C3 module, integrated with elements
inspired by the ELAN module (Zhang, 2022). This
design choice aims to optimize the gradient flow
within the network, ensuring that each computational
block benefits from richer gradient information. The
principal advantage of the C2f module lies in its
ability to balance lightweight architecture with high
accuracy, an essential trait for real-time object
detection tasks. Unlike the more straightforward C3
module, the C2f module is engineered to facilitate a
more efficient gradient flow throughout the network.
This efficiency is achieved by strategically stacking
computational blocks to minimize the length of
gradient paths. Such an architecture not only
enhances learning efficiency but also reduces latency,
making it particularly suited for applications
requiring quick and accurate object detection. The
C2f module incorporates a dual-focus approach: it
retains the compact and efficient nature of its
predecessor while significantly amplifying the
network's sensitivity to gradient information. This is
achieved through a novel stacking method that
carefully orchestrates the computational blocks,
ensuring optimal gradient flow and minimal
information loss.
In the context of this study, the C2f module
replaces the traditional C3 component in the
backbone network. This replacement not only
lightens the model's computational load but also
improves the accuracy of object detection. By doing
so, it addresses the perennial challenge of balancing
speed and performance in object detection models.
2.2.3 Loss Function: DFL+CIoU
The integration of DFL with CIoU Loss marks a
significant advancement in the model's ability to
precisely localize and classify objects within an
image. This hybrid loss function is meticulously
designed to optimize the bounding box regression and
classification tasks simultaneously, thereby
enhancing the overall precision of the object detection
process, as:
log( )
() (1 )
t
p
ttt
DFL p p
γ
α
=− −
(1)
2
2
ˆ
(, )
1
bb
CIoU IoU v
c
ρ
α
=− + + ∗
(2)
DFL modifies the standard focal loss by applying
a cross-entropy optimization to the two positions
closest to the target label, both to the left and right.
This optimization allows the network to concentrate
on the distribution surrounding the target area more
effectively, bringing the output distribution closer to
actual floating-point coordinates. The CIoU loss
component further refines this process by taking into
account the complete overlap between predicted and
ground-truth boxes, thus improving the spatial
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
454

accuracy of the predictions. In this research, the
DFL+CIoU loss function is applied at the output stage
of the model, specifically tailored to enhance the
precision of bounding box predictions. This approach
not only addresses the limitations of conventional loss
functions in handling complex object relations and
varying scales but also significantly improves the
model's ability to distinguish between closely situated
objects, a common challenge in dense object
detection scenarios. By incorporating the DFL+CIoU
loss function, the study aims to establish a more
effective training regimen, optimizing both the
localization and classification aspects of the detection
task. This enhancement is crucial for achieving high
accuracy in real-world applications where the
precision of object detection can significantly impact
performance and outcomes.
2.3 Implementation Details
The enhanced system, utilizing Python 3.8.0 and the
PyTorch framework, operates on an NVIDIA Tesla
T4 GPU, ensuring efficiency in processing and model
training. Advanced data augmentation techniques,
including Mosaic augmentation alongside standard
practices such as flipping and scaling, significantly
enhance the training dataset's diversity. This
approach improves the model's robustness and
accuracy across various object detection scenarios.
The experiment environment is finely tuned with
selected hyperparameters to optimize the training
process: a learning rate of 0.01 facilitates a balanced
convergence speed, while momentum at 0.937 helps
navigate local minima. The image size is set to
640x640 pixels, optimizing detail preservation and
computational load. A batch size of 16 ensures
efficient data processing without compromising
system responsiveness. These configurations
contribute to a balanced framework, aiming for
superior performance in the enhanced YOLOv5
object detection model.
3 RESULTS AND DISCUSSION
The third chapter delves into the results derived from
implementing strategic architectural improvements
and a novel loss function within the YOLOv5
framework. It ties the enhancements directly to the
methodologies described in the Methods section,
emphasizing the incorporation of the C2f module and
the DFL function.
3.1 mAP Analysis
Figure 2. demonstrates the mAP scores for both the
enhanced model (blue line) and the original YOLOv5
(green line) across epochs. The C2f module's
inclusion, which optimizes gradient flow and enriches
gradient information for computational blocks, has
contributed to a steady increase in the mAP scores of
the modified model. This architectural modification
balances the need for a lightweight structure with
accuracy, resulting in improved precision,
particularly in real-time detection tasks.
3.2 Recall Analysis
In Figure 3, the enhanced model's recall rate improves
and stabilizes above the original YOLOv5. This can
be accredited to the C2f module's efficiency in
facilitating gradient flow, which in turn influences the
sensitivity of the model to detect true positives,
thereby enhancing recall rates.
Figure 2: mAP progression over epochs, showcasing the impact of the C2f module
(Photo/Picture credit: Original).
Joint C2f and Joint Loss Object Detection Based on YOLOv5
455
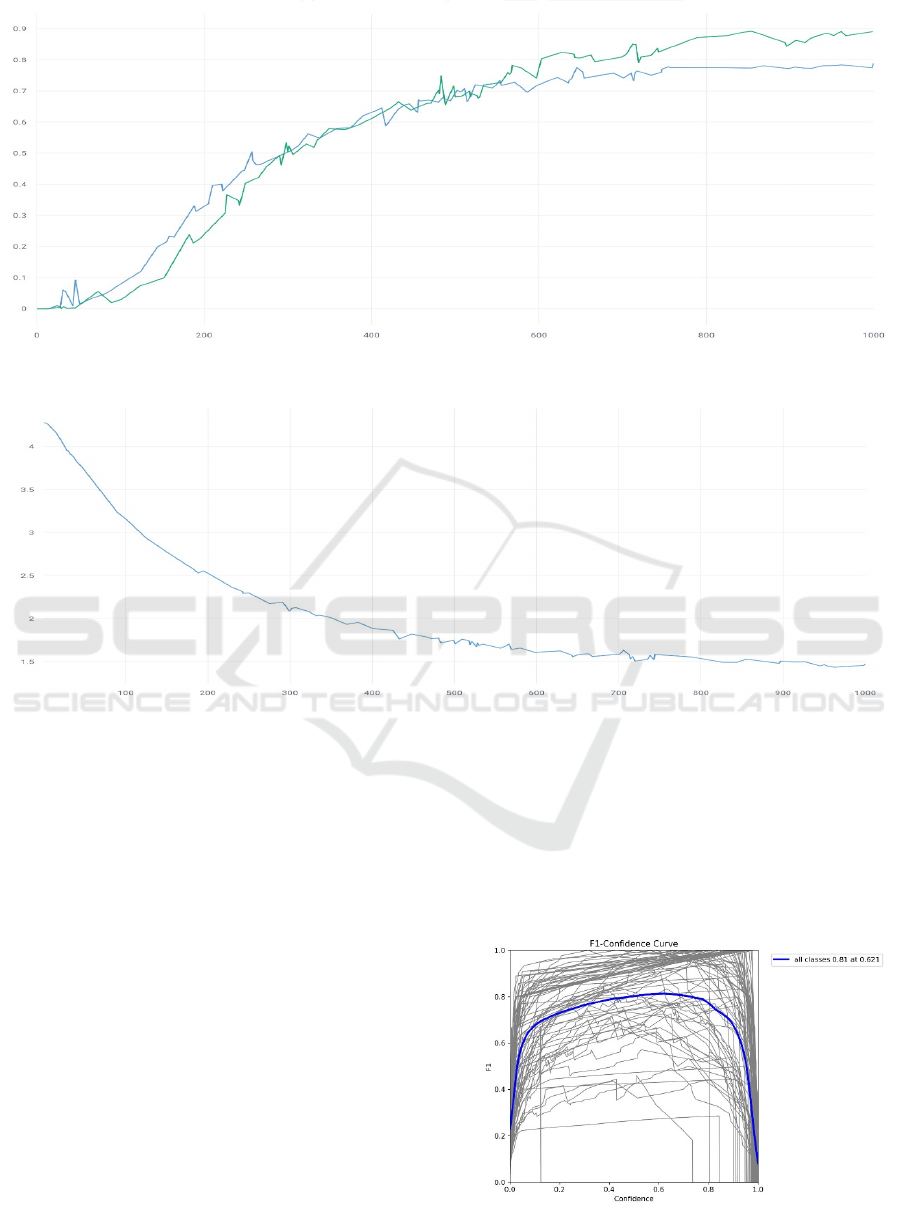
Figure 3: Recall rate comparison over epochs between the enhanced and original YOLOv5 (Photo/Picture credit: Original).
Figure 4: Training loss over epochs with DFL, underscoring localization and classification improvements (Photo/Picture
credit: Original).
3.3 Loss Analysis
Figure 4. depiction of the loss trend displays the
significant impact of the DFL function, showing a
more pronounced decrease in loss values over epochs
for the modified model. The DFL, which adjusts the
focal loss to concentrate on the distribution
surrounding the target area, coupled with the CIoU
component, has optimized the model's localization
and classification capabilities. These adjustments
address complex object relations and scale variations,
reducing the model's loss and enhancing its detection
accuracy, especially for densely packed objects.
3.4 F1-Confidence Analysis
Figure 5. incorporates the F1-Confidence curve
analysis, highlighting the optimal confidence
threshold identified through the study. The curve
peaks at an F1 score of 0.81 at a confidence level of
0.621, suggesting the modified model's precise
balance between precision and recall. This peak
performance is a testament to the methods employed,
particularly the DFL and CIoU loss function which
has been pivotal in enhancing bounding box
accuracy.
Figure 5: F1-Confidence Curve illustrating the model's
precision-recall balance
(Photo/Picture credit: Original).
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
456

In essence, the experimental findings presented in
this chapter are a direct consequence of the C2f
module and DFL function integrated into the
YOLOv5 architecture. The results not only validate
the proposed methods but also highlight the
significance of these enhancements in achieving high
accuracy in complex object detection scenarios, a
crucial factor in the applicability of such models in
real-world settings.
4 CONCLUSIONS
This study enhances object detection by innovatively
modifying the YOLOv5 architecture. This article
introduces the C2f module for improving gradient
flow and feature learning and integrates the
distribution focus loss with the CIoU loss function for
fine localization and classification. This fusion solves
the inherent class imbalance and complex spatial
relationships in dense object scenes. Additionally,
this article rigorously evaluates the enhanced model
using the COCO128 dataset, demonstrating
substantial improvements compared to the original
YOLOv5. Key indicators such as mAP, recall, and
bounding box prediction accuracy demonstrate
enhanced effectiveness. Emphasis was placed on the
role of C2f modules in ensuring lightweight yet
accurate architecture, as well as the contribution of
DFL+CIoU loss functions in addressing changes in
scale and complex object relationships. Future work
will aim to scale the model for broader real-world
applications, focusing on enhancing its robustness
across varying object sizes and environmental
conditions. The objective is to optimize performance
through advanced data augmentation and expanded
dataset diversity, ensuring the model's adaptability
and effectiveness in real-world deployments. This
research lays the groundwork for future
advancements in object detection, paving the way for
more nuanced and robust detection models.
REFERENCES
Girshick, R., Donahue, J., Darrell, T., & Malik, J., 2014.
Rich feature hierarchies for accurate object detection
and semantic segmentation, CVPR, pp. 580–587.
He, K., Zhang, X., Ren, S., & Sun, J. 2015. Spatial pyramid
pooling in deep convolutional networks for visual
recognition. IEEE transactions on pattern analysis and
machine intelligence, vol, 37(9), pp: 1904-1916.
Lin, T. Y., Dollár, P., Girshick, R., He, K., Hariharan, B.,
& Belongie, S. 2017. Feature pyramid networks for
object detection. In Proceedings of the IEEE conference
on computer vision and pattern recognition pp. 2117-
2125.
Lin, T. Y., Goyal, P., Girshick, R., He, K., & Dollár, P. 2017.
Focal loss for dense object detection. In Proceedings of
the IEEE international conference on computer vision.
pp. 2980-2988.
Lin, T. Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., & Zitnick, C. L. 2014. Microsoft coco:
Common objects in context. In Computer Vision–
ECCV 2014: 13th European Conference, pp. 740-755.
Liu, S., Qi, L., Qin, H., Shi, J., & Jia, J. 2018. Path
aggregation network for instance segmentation. In
Proceedings of the IEEE conference on computer vision
and pattern recognition, pp. 8759-8768.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, Y.C., & Berg, A.C., 2016. Ssd: Single shot
multibox detector. ECCV. pp. 21–37.
Misra, D., 2019. Mish: A self regularized non-monotonic
activation function. arXiv:1908.08681.
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A., 2016.
You only look once: Unified, real-time object detection.
CVPR, pp. 779–788.
Redmon, J., & Farhadi, A., 2017. YOLO9000: better, faster,
stronger. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pp. 7263-7271.
Redmon, J., & Farhadi, A., 2018. Yolov3: An incremental
improvement. arXiv:1804.02767.
Sun, Y., Chen, G., Zhou, T., Zhang, Y., & Liu, N. 2021.
Context-aware cross-level fusion network for
camouflaged object detection. arXiv:2105.12555.
Wang, C. Y., Liao, H. Y. M., Wu, Y. H., Chen, P. Y., Hsieh,
J. W., & Yeh, I. H. 2020. CSPNet: A new backbone that
can enhance learning capability of CNN. In
Proceedings of the IEEE/CVF conference on computer
vision and pattern recognition workshops, pp. 390-391.
Zhang, X., Zeng, H., Guo, S., & Zhang, L. 2022. Efficient
long-range attention network for image super-
resolution. In European conference on computer vision,
pp. 649-667.
Zheng, Z., Wang, P., Ren, D., Liu, W., Ye, R., Hu, Q., &
Zuo, W., 2021. Enhancing geometric factors in model
learning and inference for object detection and instance
segmentation. IEEE transactions on cybernetics, vol.
52(8), pp: 8574-8586.
Joint C2f and Joint Loss Object Detection Based on YOLOv5
457
