
Automated Mission Management of Small Unmanned Aircraft Systems
for Critical Events in Urban Air Traffic
Robin M
¨
uller
a
and Maximilian Bauer
b
Institute of Flight Systems and Automatic Control, Technical University of Darmstadt, Germany
Keywords:
Safe Autonomous Systems, Contingency Management.
Abstract:
Unmanned aerial systems (UAS) have a great potential to benefit society. This has already been shown in many
use-cases. Nevertheless the true potential lies in the upscaling of operations. Therefore a high automation level
and ensured safety is needed. A common approach to adress safety in aviation is a risk analysis following by
the design of procedures to mitigate the risks - so called contingency procedures. This paper presents a
functional framework for automated mission management including contingencies for UAS. The framework
is based on behavior trees and can be integrated with popular open source flight control software like PX4
and Ardupilot. Missions can be planned in a graphical interface using building blocks or in a Ground Control
Station software like QGroundControl. The planning of contingency procedures is decoupled from the mission
planning and allows for high modularity. Procedures can easily be added, modified or deleted, which is very
important for certification of operation. The functionality of the framework is validated in various simulations,
testing a plethora of contingencies and missions. Flight tests are currently conducted. The code needed to use
the framework can be found on the website: https://robin-mueller.github.io/auto-apms-guide/.
1 INTRODUCTION
UAS already demonstrated to have great potential for
a broad spectrum of applications. While most cur-
rent applications focus on remote controlled or partly
automated operations in visual line of sight (VLOS),
the requirements of future commercial UAS applica-
tions will exceed current automatic capabilities (Fed-
eral Ministry of Transport and Digital Infrastructure,
2020, 9). To provide scalable and sustainable UAS-
services, self-sufficient beyond visual line of sight
(BVLOS) operations are required. Among other au-
tomated functions, automatically executable contin-
gency and emergency procedures have to be devel-
oped and implemented to enable safe autonomous
navigation.
The presented work builds upon existing mission
management architectures as well as already defined
contingency management requirements and employs
open source tools and frameworks commonly used for
developing automated systems.
To implement specific behaviors, this work adapts
the model-based software design approach, which is
a
https://orcid.org/0009-0000-6775-389X
b
https://orcid.org/0000-0001-6377-2276
gaining popularity when designing complex systems
(Pinqui
´
e et al., 2022). As a result, the developer
is not required to be extensively experienced in pro-
gramming, because behaviors are created using build-
ing blocks with well defined interfaces instead by re-
designing low-level software code.
Within the scope of this work, the behavior tree
paradigm is applied in conjunction with recent re-
search on the topic of unmanned aerial operations and
state-of-the-art software packages for robotics. Ul-
timately, this paper designs and implements a flight
management framework that enables operators to ef-
ficiently plan, deploy and execute highly automated
missions including contingency procedures. This is
accomplished by
• elaborating a modular system architecture for au-
tomated contingency and mission management,
• designing a high-level behavior-based automatic
control framework,
• providing a standard interface for managing the
life cycle of real-time processes and
• adopting actively maintained open-source soft-
ware packages widely used in robotics.
174
Müller, R. and Bauer, M.
Automated Mission Management of Small Unmanned Aircraft Systems for Critical Events in Urban Air Traffic.
DOI: 10.5220/0012951500003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 174-181
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2 RELATED WORK
(Kl
¨
ockner, 2013, 59) and (
¨
Ogren, 2012) introduce
mission management for UAV using behavior trees
and extensively discussed the advantages while also
showing and providing some missing formulation.
Standardized formulations, a framework or the con-
sideration of contingency procedures is still missing
in literature.
Contingency management for UAS was discussed and
a framework for the creation of contingency proce-
dures was introduced by Eduardo et al. (Teomitzi and
Schmidt, 2021, 2). This theoretical framework is the
basis for the conceptualization of our technical and
software framework.
(Usach et al., 2017) introduced many aspects to con-
sider when building architectures for automated con-
tingency management and influenced the design of
the framework presented in this paper.
Consequently one can state, that the foundations
for automated mission and contingency management
were already laid, but a framework that integrates and
leverages them to valuable application is still missing.
The challenges that come along with it are addressed
and solutions for them are presented in this paper.
3 DESIGN
To explain the design we will introduce the relevant
aspects of contingency management and then the ar-
chitecture and its components
3.1 Contingency Management
We adapt the definition of contingency management
given by (Teomitzi and Schmidt, 2021). The authors
clearly distinguish between contingencies and emer-
gencies: Contingencies are defined as obstacles to the
fulfillment of a system’s high-level requirements and
emergencies are considered as direct threats to the
safety of the operation. Based on literature research
and system analysis, they assemble an extensive cata-
log of mission jeopardizing events, mitigation strate-
gies and recovery actions. With such actions, a con-
tingency management system (CMS) is able to proac-
tively safeguard the UAS during the entire operation.
(Teomitzi and Schmidt, 2021)
With respect to this definition, figure 1 arranges
the approaches to enhance system safety in a single
model: The bow-tie model. Originally, this repre-
sentation has been developed to support the assess-
ment of the risks involved in the operation of an UAS
(JARUS, 2017). It focuses on a single hazard, which
may occur due to several threats, which again may
result in one or more consequences. The key to min-
imize the risk of operational safety impairment is to
put certain barriers or controls in place.(Teomitzi and
Schmidt, 2021)
Figure 1: Contingency management within the bow-tie
model. (Teomitzi and Schmidt, 2021, 2).
Additionally to contingency and emergency man-
agement, reliability engineering has been integrated
into the model. Figure 1 shows that threat barriers are
applied before the manifestation of a hazard, while
recovery measures or controls take place afterwards.
Reliability engineering and emergency management
only introduce threat barriers respectively recovery
measures, however, contingency management is able
to do both. (Teomitzi and Schmidt, 2021)
A contingency procedure is a flight procedure de-
signed to mitigate the inherent risk of a contingency
state (Usach et al., 2017, 6). In this work, the term
contingency recovery procedure (CRP) is advocated
instead to emphasize that the developed CMS needs
to detect a threat or hazard in order to trigger the
procedure. Multiple guidelines for designing contin-
gency procedures with respect to unmanned systems
have been established. (Usach et al., 2017) The proce-
dures are developed prior to operation and often need
to be reviewed by an authority that regulates the op-
eration. The structure of the procedures is very clear.
When a threat or hazard is detected by a subsystem,
a sequence of actions is triggered to prevent or mit-
igate potential negative outcomes. Detection and re-
sponse can occur at various levels — such as com-
ponents, software modules, internal, or external —
but in most cases, a part of the system must be shut
down or reconfigured. After or during this reaction,
an automated UAS can either continue its mission, di-
vert from the original trajectory and return after the
contingency has been solved, divert immediately to
a safe/alternative landing site and abort its mission
or request (temporary) support from a human oper-
ator. The created framework can be used to imple-
ment the automated onboard execution of these con-
tingency plans. Sub-system level reactions like shut-
ting off or re-configuring components and software
Automated Mission Management of Small Unmanned Aircraft Systems for Critical Events in Urban Air Traffic
175
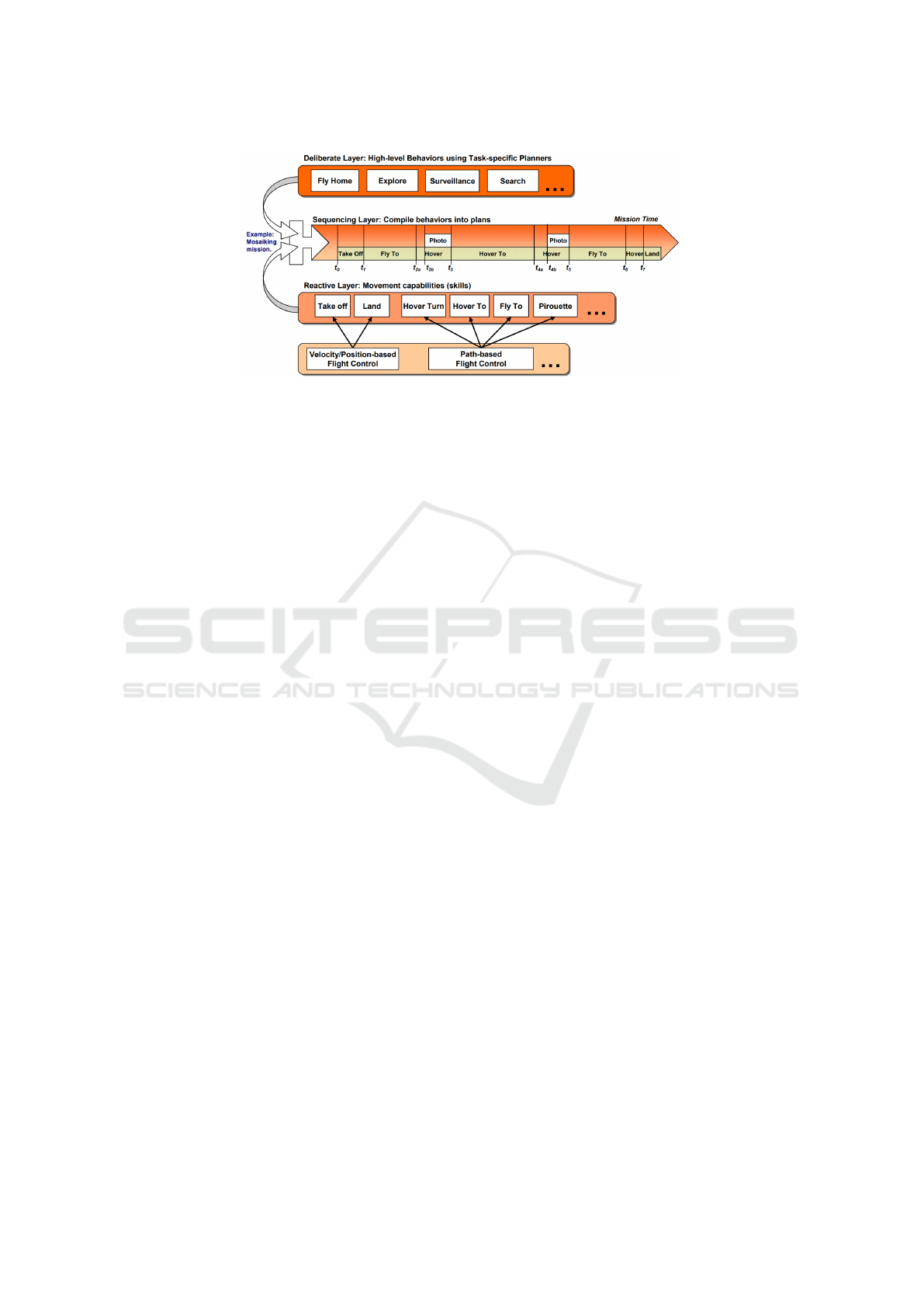
Figure 2: Three tier UAS mission planning architecture. (Adolf and Thielecke, 2007).
modules can flexibly be integrated while for the guid-
ance of the UAS there are already building blocks that
can be used. The operator is responsible for the spe-
cific implementation of behaviors, such as detection
algorithms or re-planning methods.
3.2 Architecture
Since the beginning of the development of robotic
systems, there has been three capabilities to consider
when performing automated, robotic motion: Sense,
plan and act. The relationship between and the im-
plementation of each of those primitives are defined
by system architectures which are developed individ-
ually for a specific field of application. (Ankit Srivas-
tava, 2019, 1)
This work requires a high-level planning approach
for UAS missions that allows to dynamically compile
plans for contingency events during run-time. A com-
mon flexible and modular architecture that provides
these capabilities is shown in figure 2. The three tier
architecture (3TA) separates intelligent control into
three layers with different abstraction levels.
The Reactive Layer comprises a set of elemen-
tary skills and controls the UAS with the lowest level
of abstraction. In this context, reactive means that
these skills are tightly coupled with the environment
through sensor readings and actuators. There is no
planning step when executing reactive skills, but only
a initially defined goal that the skill aims to achieve.
Therefore, they are considered as functions reacting
to sensor readings and transferring them to actuator
outputs according to the underlying implementation
and the specified goal. (Adolf and Thielecke, 2007,
4)(Ankit Srivastava, 2019, 3)
The Deliberate Layer offers the highest level of
abstraction for defining mission tasks. A compo-
nent of this layer plans prospective movements using
a task-specific planner that reasons about goals, re-
sources and timing constraints (Adolf and Thielecke,
2007, 4). As a result, individual skills defined by the
reactive layer are compiled into a complex behavior
plan to accomplish the given task. These plans alter
the existing or create an entirely new mission (Adolf
and Thielecke, 2007, 6).
Finally, the centralized Sequencing Layer exposes
said plans for sequential execution and represents the
currently pursued mission. This layer assembles a
network of appropriate tasks handled by a sequencer
that activates and deactivates respective skills. In gen-
eral, concurrency between behaviors is not allowed,
but certain behaviors may execute additional skills
that are not related to movement but for example to
the vehicle’s payload (e.g. taking photos with an on-
board camera or releasing rope from a winch). (Adolf
and Thielecke, 2007, 4)
This architecture presents a solution to mission
management as a hybrid control problem and of-
fers a flexible way of modularization. Thanks to
the separate behavior-based reactive layer, plans can
be generated automatically with algorithms designed
for specifically assembling the available behavioral
skills. Therefore, this approach is well suited to be
utilized in the context of automated contingency man-
agement during UAS missions. (Adolf and Thielecke,
2007, 4)
3.3 System Components
A fundamental design principle chosen for the inte-
gration of automated contingency management tasks
is to introduce modules with well defined responsi-
bilities. This paper advocates the UAS architecture
outlined by figure 3.
The figure adapts the architecture of Usach et
al. (Usach et al., 2017), which introduces a CMS
comprising two modules: The Safety Monitor and
the Contingency Manager. The former evaluates the
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
176

Figure 3: Functional components of an UAS with contingency managment.
flight and system data that is available to the UAS and
decides, whether an abnormal situation has occurred.
In that case, it publishes this information to the con-
tingency manager, which plans and executes a CRP
according to a suitable contingency resolution strat-
egy. Therefore, the safety monitor defines the current
contingency state. Normally, the Mission Manager
is responsible for executing the actions that the cur-
rently pursued mission dictates, but on the occurrence
a critical event, the contingency manager is allowed to
take over control. The mission manager will eventu-
ally be commanded to stop executing which leaves the
contingency manager in charge of behavior execution.
Both components use the same functionality to in-
struct the vehicle’s movement. The flight controllers
usually run on different, real-time capable hardware
and its implementation heavily depends on the used
flight stack. Behavior planning and execution solu-
tions should be universally applicable to a wide range
of UAS, so flight control is considered to be a stan-
dalone module by design.
With respect to the mission planning architec-
ture from figure 2, one may implement the safety
monitor and the contingency manager on the deliber-
ate layer. This approach would require a single be-
havior planning instance to include safety monitor-
ing and contingency handling tasks in the sequencing
machine alongside nominal mission actions. Conse-
quently, contingency and mission management con-
cerns would not be well separated. Figure 3 depicts an
alternative approach, where contingency monitoring
and decision-making functions are implemented on
top of the mission manager. Thus, procedures planned
by the contingency manager have priority over the
nominal mission. Whenever a contingency event is
raised, the mission manager works in a slave mode
and preempts the execution of the current procedure.
(Usach et al., 2017)
In the following, the functional requirements of
the components involved in behavior planning and ex-
ecution are defined. Together, they achieve all contin-
gency management tasks presented in figure 4.
Figure 4: Tactical contingency management process cycle.
(Teomitzi and Schmidt, 2021).
3.3.1 Safety Monitor
The first process in the hierarchy of contingency man-
agement monitors the system state, gathers traffic data
and assesses the current situation of the automated
vehicle. It is responsible for maintaining operational
safety. Therefore, the safety monitor is the first com-
ponent that becomes aware of an abnormal event that
affected the UAS thus it can be considered as the con-
tingency detector. It decides whether a situation must
be classified as operation critical or not. Furthermore,
it is in charge of scenario prioritization if multiple
critical events occur concurrently. (Usach et al., 2017)
The contingency manager observes the output of
the safety monitor and acts as a multiplexor that
launches the required contingency procedure. Con-
sequently, the safety monitor is superior to the contin-
gency manager. (Usach et al., 2017)
3.3.2 Contingency Manager
The contingency manager is providing the desired re-
action after a contingency scenario has been iden-
tified. A behavior plan is created according to the
current contingency state defined by the safety mon-
itor. The operator has to explicitly connect a finite
number of generally feasible behaviors with certain
contingency states during design phase. If a critical
Automated Mission Management of Small Unmanned Aircraft Systems for Critical Events in Urban Air Traffic
177
event occurs, the contingency manager automatically
chooses a designated counteracting behavior from the
associated, manually defined catalog and launches its
execution. A behavior’s feasibility is dynamically
evaluated based on the current system capabilities and
characteristic execution requirements. (Usach et al.,
2017)
3.3.3 Mission Manager
The currently pursued mission is executed by the mis-
sion manager, which is a standalone behavior ex-
ecutor. This component also incorporates the 3TA.
The contingency manager may reuse mission man-
ager’s deliberate or reactive behaviors and access its
sequencing layer. If it has been decided that the oc-
curred contingency shall be handled by altering the
procedure executed by the mission manager, a new
mission may be loaded. Hence, the contingency man-
ager is able to override the nominal mission. Dur-
ing normal operation, the mission manager is the only
component that requests flight control actions. (Usach
et al., 2017)
4 IMPLEMENTATION
The elaborated CMS assumes that fundamental flight
tasks are already covered by a basic flight stack and
corresponding interfaces are provided and externally
accessible. In other words, the system requires an in-
dependently acting control layer that manages essen-
tial low-level computations and introduces additional
processes that increase the vehicle’s behavioral com-
petencies. Moving forward, the widely used open-
source autopilot software stack PX4 is leveraged in
this regard (Lorenz Meier et al., 2024). For modeling
the involved decision-making processes, the behavior
tree paradigm is to be applied. Furthermore, the pop-
ular software package ROS2 (Macenski et al., 2022)
is used as a middleware for the real-time system.
4.1 Multilayered Actuation
Effectively, both mission management and contin-
gency handling are processes fully capable of dis-
playing a behavior by controlling the automated sys-
tem, so they are also referred to as “competences”
(Toal et al., 1995, 2). However, the vehicle’s actu-
ators must only be controlled by one instance at a
time. In the field of robotics, this control problem
is solved by incorporating the so-called subsumption
architecture. Here, competences are represented by
horizontally arranged layers. Higher-level layers can
subsume the roles of lower levels by suppressing their
outputs at any given time. Lower levels therefore
implement fundamental functionality, whereas higher
levels add specialized competences to the control sys-
tem. (Brooks, 1986)
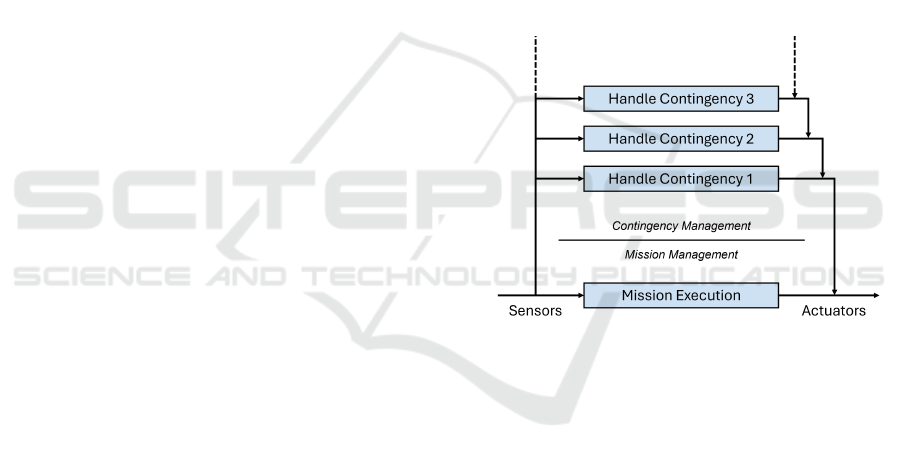
Figure 5 applies this architecture to achieve safe
automated UAS mission management. The lowest
level competence implements functionalities to se-
quentially execute flight actions according to the mis-
sion plan. This level assumes an ideal operational en-
vironment and doesn’t account for critical events. Ad-
ditional competences revolving around contingency
management are added in higher levels. Specialized
tasks, each of them responsible for handling a spe-
cific contingency, are implemented above mission ex-
ecution. The higher the level of the contingency han-
dler, the higher its priority. Therefore, this architec-
ture queues the contingencies based on their priority
which was determined prior operation.
Figure 5: Control architecture for contingency handling.
Based on the subsumption architecture by Brooks et al.
(Brooks, 1986).
4.2 Behavior Modeling Using Trees
¨
Ogren (
¨
Ogren, 2012) and Kl
¨
ockner (Kl
¨
ockner, 2013)
already put behavior trees in context with UAS mis-
sion management. More specifically,
¨
Ogren advo-
cates to employ BTs when performing ordered tasks
or applying the subsumption control architecture.
Consequently, it is sensible to adapt the tree modeling
paradigm for behavior development in this research.
Furthermore, the behavior-based approach allows
to separate behavior planning from vehicle control
concerns, since corresponding tasks are designed to
execute asynchronously according to the previously
mentioned client-server model. However, there may
also exist tasks with other purposes, which are not dis-
tributed by servers and execute synchronously. In be-
havior trees, the action node presents a model to what
is referred to as a task here: An Action performs some
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
178
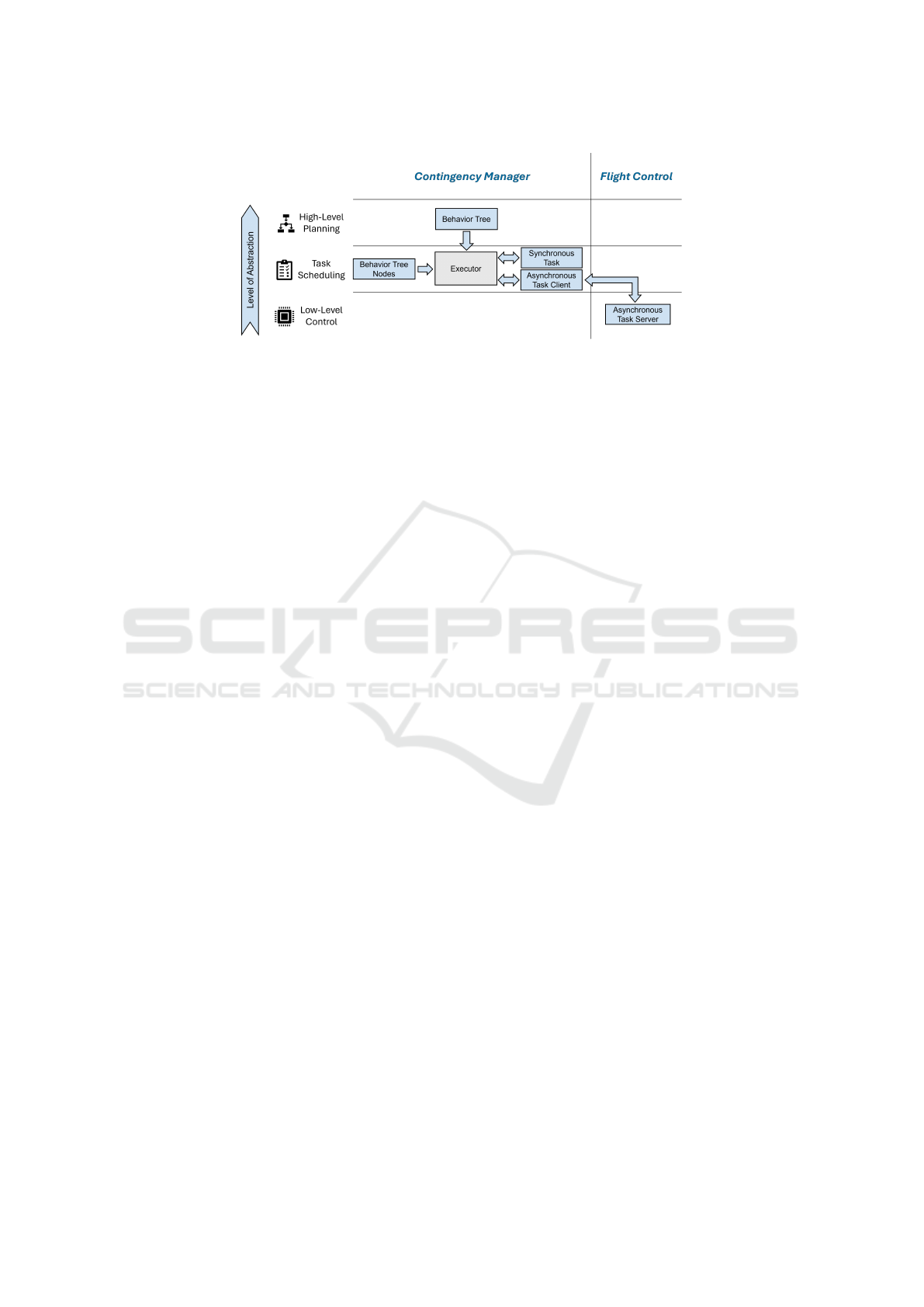
Figure 6: Levels of abstraction during behavior tree execution.
computation and returns Success if its objective has
been accomplished, Failure if a problem occurred or
Running if completion is under way (
¨
Ogren, 2012, 4).
Therefore, a task may provide any kind of functional-
ity and is not limited to for example executing flight
actions. Kl
¨
ockner defines a task as “a self-contained
goal-directed behavior, which can be executed in or-
der to achieve a given goal” (Kl
¨
ockner, 2013, 58).
Figure 6 divides different fields that are instru-
mental to the development of behaviors into three lev-
els of abstraction: High-level planning, task schedul-
ing and low-level control.
At the highest level of abstraction, the behavior
designer is concerned with appropriately organizing
tasks to achieve specific missions. During high-level
planning, the tasks themselves are exposed to the de-
signer by their functional interfaces. A task may be
configured by input parameters and pass information
to the client during and after execution.
Task clients are created during task scheduling.
At this level, the behavior is dictated by the imple-
mentation of the behavior tree nodes. Associated
literature discusses the following fundamental node
types: Action, Condition, Sequence and Selector. An
Action executes a computational task according to a
certain goal as described above. A Condition deter-
mines whether the current state corresponds to a cer-
tain statement. A Sequence executes all of its children
in a certain order, whereas a Selector only does so un-
til the first one succeeds. A big variety of behaviors
can already be modeled with these four general types,
but the capabilities of the tree may be extended by em-
bedding custom logic in additional nodes. However,
domain specific programming knowledge is required
for this intend, which is why task scheduling provides
a lower level of abstraction than high-level planning.
(
¨
Ogren, 2012)
The lowest level of abstraction in the execution of
the behavior tree is represented by low-level control
algorithms that are available to the system as services.
The algorithms read sensor data that is necessary for
accomplishing the goal of the corresponding task and
control the UAS’s actuators accordingly. Hence, the
sense and act steps during automatic control are ac-
counted for by the instances within this level. There
shall be no planning step at this level of abstraction,
effectively meaning that the reactive control architec-
ture applies for algorithms providing the control task
(Ankit Srivastava, 2019). Instead, planning is exe-
cuted at the highest level of abstraction by building a
well structured behavior tree.
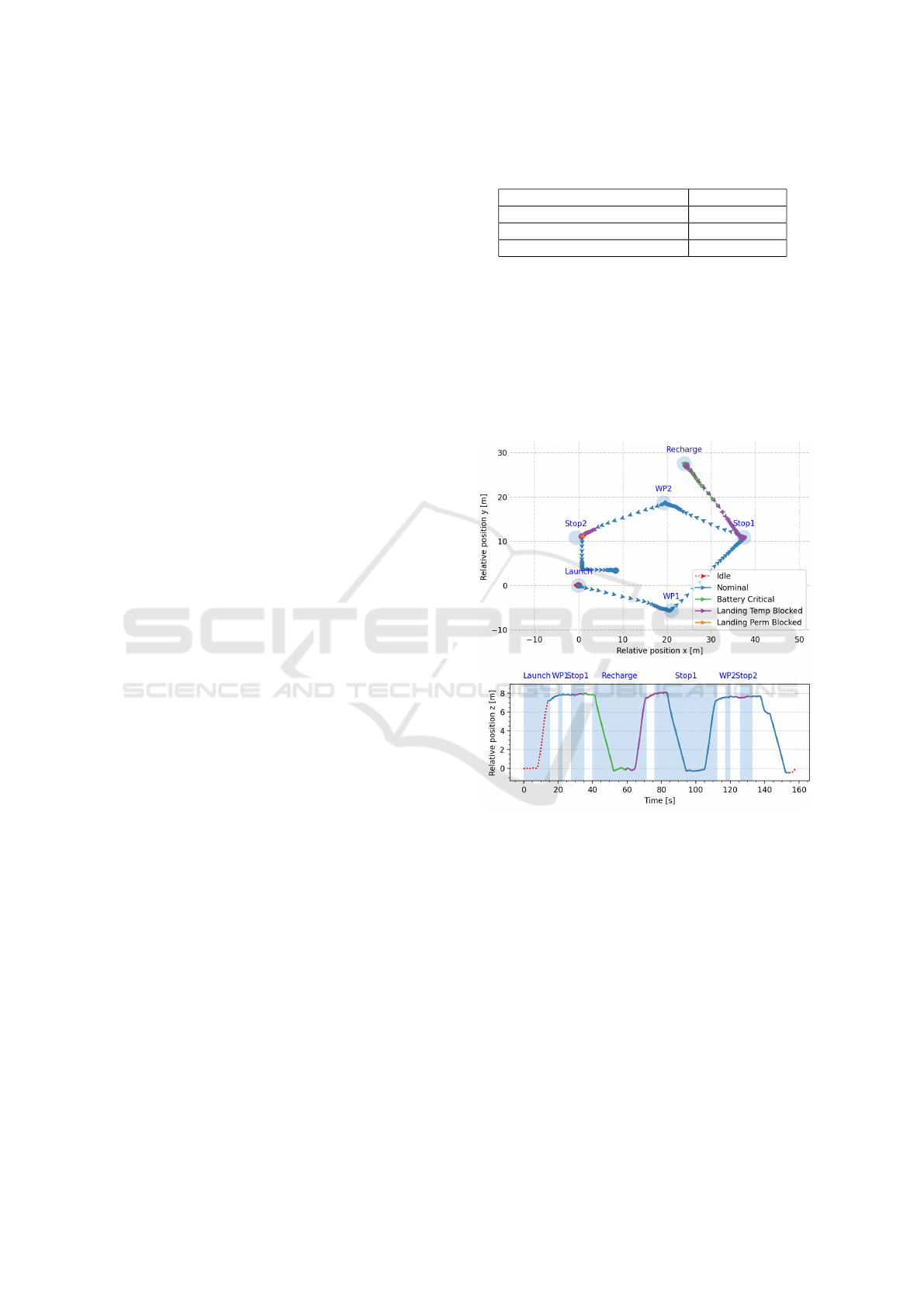
5 EVALUATION
The capabilities of the created framework are demon-
strated in a simulated example mission. Execution of
the mission is displayed in Figure 7.
5.1 Scenario Description
The mission comprises two waypoints an intermedi-
ate landing and a final landing and was implemented
as a behavior tree. It is also possible to create a mis-
sion in planning software like e.g. QGroundControl
and upload it to the mission manager. During execu-
tion of the mission, three different hazards will occur
and predefined resolution strategies will be executed.
The first threat is a loss of energy (LoE). A LoE oc-
curs when the system is running out of energy faster
than expected and successful mission completion is
in danger. To detect this hazard, the energy source
of the UAS must be monitored and associated with
the energy cost of the remaining tasks. The imple-
mented strategy “Battery critical” guides the UAS to
the nearest safe point, when the hazard is detected.
Since the nominal mission is to be resumed later, a
temporary mission to the recharge point is executed
independently from the mission manager. This mis-
sion is additionally designed to return to the position
where the contingency has been detected, as soon as
the energy level is restored. After the contingency is
Automated Mission Management of Small Unmanned Aircraft Systems for Critical Events in Urban Air Traffic
179
resolved, vehicle control is given back to the mission
manager.
The second and third hazards are a loss of land-
ing location (LoLL). A LoLL occurs if a designated
landing site is not clear for landing. Various reso-
lution strategies are conceivable. If it is impossible
for the UAS to land due to malfunctioning infrastruc-
ture or a nearby incident, it probably is most effective
to skip this landing or determine an alternative land-
ing location. In that case, the landing site is consid-
ered permanently blocked. If the landing must be per-
formed at all costs or the landing site is just temporar-
ily blocked due to quick maintenance work or other
on-going processes, it’s feasible to wait for clearance.
During “Landing temporarily blocked”, a so-
called safe loiter maneuver is performed. This means
that the vehicle commands its actuators so that it holds
the current position. This character of the maneu-
ver depends on the type of the UAS. A multicopter
is able to stop and hover immediately, while a fixed-
wing must circle around a given position.
If “Landing permanently blocked” applies, a new
location is to be approached for landing. Such a loca-
tion may be predefined during the strategic phase of
operation or it is automatically determined just in time
when a LoLL contingency is detected. Afterwards,
a corresponding route is calculated and the nominal
mission is updated. Following the update, the cur-
rent mission segment has been expanded to include a
number of detour tasks to the now targeted alternative
landing site. In this procedure, the contingency man-
ager does not make use of flight control. Instead, it
copes with LoLL by taking responsibility of planning
and setting up the mission manager, which is left in
charge of executing the diversion within a customized
nominal mission segment.
Each contingency scenario may arise at any point
in time and the original mission is not to be continued
until the abnormal situation is resolved. This poses
a complex challenge and requires the implemented
CMS to dynamically plan and safely execute the de-
sired behavior regardless the drone’s position within
the designated flight zone or the progress of the mis-
sion. If multiple scenarios apply, it is required to pri-
oritize a procedure and dynamically react to changes
of the contingency state. To achieve that behavior,
specific priorities are assigned to each of the incorpo-
rated contingency states regarding scenario identifi-
cation and procedure execution. The prioritization of
the considered contingencies are summarized in table
1.
Table 1: Prioritization of the contingencies applied during
simulation.
Contingency name Priority level
Battery critical High
Landing permanently blocked Medium
Landing temporarily blocked Low
5.2 Simulation
The first time, the drone detects that the landing site
at “Stop1” is temporarily blocked when this waypoint
is reached and holds the position. Realistically, the
battery level decreases in that period and it is simu-
lated that a critical state is reached eventually. Figure
7 shows that the UAS diverts to the recharge point
as intended. On the way back, the landing site is
Figure 7: Flight operations involving multiple contingen-
cies.
again recognized to be temporarily blocked and the
battery contingency handler guides the vehicle back
to the original position where it will continue to wait
for clearance. The other situation occurs around way-
point “Stop2”. In the process of approaching the sec-
ond landing location, its status changes to be tem-
porarily unavailable, so the drone stops one more time
and waits for further action. However, this time the
status of the landing site changes to be permanently
blocked in the mean time which requires the system
to land at an alternate location. The mission manager
is updated accordingly and the flight continues target-
ing a new destination. Finally, the vehicle lands at the
dynamically calculated coordinates and the operation
completes successfully.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
180

6 CONCLUSION
This work contributes to enabling certifiable and
therefore economically viable applications for the
European drone sector. The software architecture
of the de facto autopilot standard, the open-source
PX4 flight stack, is extended to incorporate contin-
gency management for UAS. Essentially, two addi-
tional abstraction levels which are based on the be-
havior tree paradigm are introduced to the existing
automatic control pipeline: High-level planning and
task scheduling. They are build on top of the default
functions for controlling the vehicle’s movement pro-
vided by PX4 and utilize them to offer a convenient
interface for designing flight behaviors.
The simulation results validate the functionality of
the implemented features and prove the applica-
bility of the created framework. The software
of the framework is available online (https://robin-
mueller.github.io/auto-apms-guide/) and can be used
in simulation or on a real drone. Flight tests are cur-
rently conducted and the results will be published on
the web page.
It is envisaged that the contingency manager is
supplied with a catalog of various behaviors that are
specifically intended for the purpose defined by a par-
ticular resolution strategy. Instead of selecting feasi-
ble contingency procedures deterministically, further
research could address the development of algorithms
that dynamically evaluate the success probability of
all behaviors from the catalog and optimize the safety
maneuver intelligently while still being certifiable by
an authority (Colledanchise et al., 2014).
ACKNOWLEDGEMENTS
This work has been funded by the LOEWE initia-
tive (Hesse, Germany) within the emergenCITY cen-
ter [LOEWE/1/12/519/03/05.001(0016)/72].
REFERENCES
Adolf, F. and Thielecke, F. (2007). A sequence control sys-
tem for onboard mission management of an unmanned
helicopter. In AIAA Infotech@Aerospace 2007 Con-
ference and Exhibit, Reston, Virginia. American Insti-
tute of Aeronautics and Astronautics.
Ankit Srivastava (2019). Sense-plan-act in robotic applica-
tions.
Brooks, R. (1986). A robust layered control system for a
mobile robot. IEEE Journal on Robotics and Automa-
tion, 2(1):14–23.
Colledanchise, M., Marzinotto, A., and Ogren, P. (2014).
Performance analysis of stochastic behavior trees. In
2014 IEEE International Conference on Robotics and
Automation (ICRA), pages 3265–3272. IEEE.
Federal Ministry of Transport and Digital Infrastructure
(2020). Unmanned aircraft systems and innovative
aviation strategies: The federal government’s action
plan. PDF file.
JARUS (2017). Jarus guidelines on specific operations risk
assessment (sora).
Kl
¨
ockner, A. (2013). Behavior trees for uav mission
management. In Horbach, M., editor, Informatik
2013 - Informatik angepasst an Mensch, Organisation
und Umwelt, GI Edition Proceedings, pages 57–68.
Gesellschaft f
¨
ur Informatik, Bonn.
Lorenz Meier, Daniel Agar, Beat K
¨
ung, Julian Oes, Thomas
Gubler, Matthias Grob, Paul Riseborough, Roman
Bapst, Anton Babushkin, David Sidrane, Mathieu
Bresciani, px4dev, Silvan Fuhrer, Mark Charlebois,
James Goppert, Nuno Marques, Andreas Daniel An-
tener, Dennis Mannhart, PX4 Build Bot, kritz, Mark
Whitehorn, Kabir Mohammed, Jaeyoung Lim, Si-
mon Wilks, Mark Sauder, Peter van der Perk, Pavel
Kirienko, Sander Smeets, Martina Rivizzigno, and
Hamish Willee (2024). Px4/px4-autopilot: v1.15.0
beta 1.
Macenski, S., Foote, T., Gerkey, B., Lalancette, C., and
Woodall, W. (2022). Robot operating system 2: De-
sign, architecture, and uses in the wild. Science
robotics, 7(66):eabm6074.
¨
Ogren, P. (2012). Increasing modularity of uav control sys-
tems using computer game behavior trees. In AIAA
Guidance, Navigation, and Control Conference, Re-
ston, Virigina. American Institute of Aeronautics and
Astronautics.
Pinqui
´
e, R., Romero, V., and Noel, F. (2022). Survey of
model-based design reviews: Practices & challenges?
Proceedings of the Design Society, 2:1945–1954.
Teomitzi, H. E. and Schmidt, J. R. (2021). Concept and re-
quirements for an integrated contingency management
framework in uas missions. In 2021 IEEE Aerospace
Conference (50100), pages 1–17, Big Sky, MT, USA.
IEEE.
Toal, D., Flanagan, C., Jones, C., and Strunz, B. (1995).
Subsumption architecture for the control of robots.
Proceedings Polymodel-16.
Usach, H., Torens, C., Adolf, F., and Vila, J. (2017). Ar-
chitectural considerations towards automated contin-
gency management for unmanned aircraft. In AIAA
Information Systems-AIAA Infotech @ Aerospace, Re-
ston, Virginia. American Institute of Aeronautics and
Astronautics.
Automated Mission Management of Small Unmanned Aircraft Systems for Critical Events in Urban Air Traffic
181
