
Refined Object Detection: Integrating C2f and SE Mechanisms in
YOLOv5
Huanchang Tu
a
ZJU-UoE Institute, Zhejiang University, Zhejiang, China
Keywords: YOLOv5, Feature Integration, Squeeze-and-Excitation, Complex Backgrounds.
Abstract: The precise detection of small objects against complex backgrounds is crucial for advancing computer vision
technologies, with wide-ranging applications from autonomous navigation to surveillance. This paper
presents a novel integration of the modified Cross-Stage Partial bottleneck structure (C2f) and the Squeeze-
and-Excitation (SE) attention layer within the You Only Look Once version 5 (YOLOv5) framework. The
primary objective is to enhance the model's sensitivity to subtle object features, thus improving detection
accuracy in challenging environments. By leveraging the C2f module's effective feature integration and the
SE layer's focus on essential feature recalibration, the model achieves a balanced representation of depth and
detail in features. Experimental results on the COCO128 dataset reveal a notable improvement in detection
accuracy, surpassing existing methods. This study underscores the efficacy of targeted neural network
modifications in addressing specific detection challenges, providing valuable insights for the development of
more adaptable detection systems. The success of this approach highlights the potential for sophisticated
architectural enhancements to enhance the versatility and effectiveness of computer vision models across
diverse real-world scenarios.
1 INTRODUCTION
As deep learning technology has advanced swiftly,
notable advancements have been achieved in object
detection. (Happy, 2014). As a core task of computer
vision, object detection aims to identify objects
within images and locate their bounding boxes (Zou,
2023). Within the diverse array of object detection
algorithms, the You Only Look Once (YOLO) series
has captured significant attention due to its
remarkable speed and notable accuracy in detection,
particularly YOLOv5, which has demonstrated
exceptional performance across various practical
application scenarios (Terven, 2023). YOLOv5
utilizes CSP-Darknet53 as its backbone network and
introduces an improved version of Spatial Pyramid
Pooling (SPP) and a modified Path Aggregation
Network (PANet) to enhance its feature extraction
capabilities (Mallick, 2024). However, as application
requirements rise, higher demands are placed on the
algorithm's accuracy and efficiency.
In this context, researchers have begun exploring
new methods to improve model performance. In past
a
https://orcid.org/0009-0006-2071-5996
research, the Cross-Stage Partial bottleneck structure
(C2f) and the Squeeze-and-Excitation (SE) attention
mechanism have proven effective across multiple
domains. The C2f module, with its dual convolution
structure, enhances feature fusion capabilities,
especially in complex tasks requiring the processing
of high-level features and contextual information
(Singhania, 2023). For example, in the task of
detecting lightweight concrete surface cracks, the
introduction of the C2f module significantly
improved the model's accuracy and efficiency (Chen,
2023). Similarly, the SE attention layer enhances the
model's focus on important features by dynamically
weighting feature channels (Hu, 2018). This attention
mechanism has shown the potential to improve
performance in multiple deep learning applications,
such as more precise identification of cystic lesions
on magnetic resonance imaging with SE-enhanced
YOLOv5 (Xiongfeng, 2022).
To further improve the YOLOv5 model's ability
to detect small-sized objects in complex
environments, this study proposes adapting the
traditional CSP Bottleneck with 3 convolutions (C3)
730
Tu, H.
Refined Object Detection: Integrating C2f and SE Mechanisms in YOLOv5.
DOI: 10.5220/0012969900004508
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Engineering Management, Information Technology and Intelligence (EMITI 2024), pages 730-735
ISBN: 978-989-758-713-9
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
module to a C2f module and integrating the SE
attention layer. Specifically, the C2f module is used
to replace the traditional C3 module, leveraging its
advantages in integrating high-level features and
contextual information to enhance detection
accuracy. The design of the C2f module aims to
reduce the number of parameters and computational
complexity through more effective feature map
segmentation and merging strategies, thereby
enhancing the model's ability to capture fine-grained
features, especially in detecting small objects.
Furthermore, by introducing the SE attention layer,
this study further enhances the model's focus on
important features and optimizes the weight
distribution among feature channels, which is crucial
for improving the model's ability to recognize objects
of various types, especially small-sized objects in
complex backgrounds. Additionally, a
comprehensive analysis and comparison of the
predictive performance of different models are
conducted to validate the effectiveness of the
proposed method.
2 METHODOLOGIES
2.1 Dataset Description and
Preprocessing
The dataset utilized in this experiment is the
COCO128, a subset of the larger COCO (Common
Objects in Context) dataset, which is known for its
vast repository of images tailored for tasks such as
object detection, segmentation, and image captioning.
The COCO dataset, available from the COCO
Consortium's official website (Lin, 2014), comprises
over 330K images with more than 200K labeled
across 80 object categories, providing a rich variety
of annotated objects in diverse contexts. The
COCO128 subset specifically contains a curated
selection of 128 images from the COCO dataset,
designed to offer a compact yet representative sample
of the broader dataset's challenges, including a wide
range of object sizes and complex backgrounds (Li,
2022).
In preparation for the experiments, the images in
the COCO128 dataset underwent a series of
preprocessing steps to optimize them for the object
detection task. These preprocessing measures
included resizing all images to a standard dimension
of 640x640 pixels to maintain consistency across the
dataset and applying normalization based on the mean
and standard deviation of pixel values across the
COCO dataset. This standardization facilitates more
efficient learning by the model and ensures that the
input data is well-suited for the deep learning
algorithms employed in the study.
2.2 Proposed Approach
This study aims to improve the ability to detect small
objects against complex backgrounds in the YOLOv5
framework by integrating the C2f module and the SE
attention layer, while ensuring efficient inference
speed. In the introduction to the technology, the focus
lies on the integration of the C2f module and the SE
attention layer. The combination of these two main
modules aims to improve the model's ability to
process high-level features and contextual
information, as well as sensitivity to key features,
thereby enhancing detection accuracy and
performance. The research method flow includes data
preprocessing, modifications to the model
architecture, training and testing, and performance
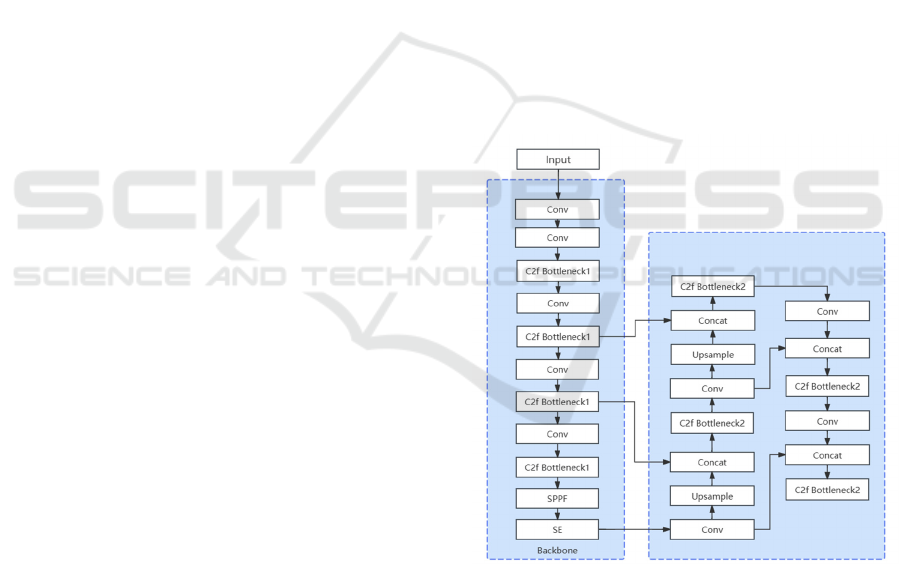
evaluation. The workflow (as shown in Figure 1)
details the entire improvement process, illustrating
the changes from the original model to the inclusion
of new modules.
Figure 1: The workflow of the YOLOv5-C2f-SE model
(Photo/Picture credit: Original).
2.2.1 Cross-Stage Partial Bottleneck with
Two Convolutions(C2f)
The convolutional layers of this model employ the
C2f module to enhance feature extraction and
processing capabilities. The C2f module is a highly
efficient feature extraction unit designed to accelerate
the processing of CSP bottleneck layers, notably
Refined Object Detection: Integrating C2f and SE Mechanisms in YOLOv5
731

through dual convolution operations that optimize
gradient flow and reduce computational complexity.
The structural design of the C2f module aims to map
input features to an expanded feature space through
initial convolution layers, followed by feature
segmentation and recombination, along with the
sequential use of multiple C2f bottleneck blocks,
deepening the processing of features at various scales.
In the YOLOv5 implementation of this study, the C2f
module is integrated into key positions within the
backbone and head, replacing existing convolutional
layers and adding new feature fusion points. Within
the backbone, starting with preliminary feature
extraction, C2f is first applied at the P2/4 level three
times, followed by six, nine, and three instances of
C2f processing at the P3/8, P4/16, and P5/32 levels,
respectively. In the head, the combination of C2f with
upsampling and Concat operations optimizes multi-
scale feature fusion and refinement. Initially, three
instances of C2f operation are introduced in the
processing of P3/8 small-size feature maps,
enhancing the model's ability to recognize small
targets; subsequently, to further improve the effect of
feature fusion, the C2f module is also used in the
processing of P4/16 and P5/32 size feature maps,
optimizing the performance of the detection head
through precise feature reorganization.
2.2.2 Squeeze-and-Excitation (SE)
The SE module is incorporated into the model to
refine its feature recalibration capabilities, focusing
on enhancing the representational power of
convolutional layers. This module operates by
selectively highlighting valuable features while
diminishing the impact of less relevant ones, utilizing
an adaptive process to recalibrate channel-wise
feature responses. Initially, the SE module employs
an adaptive average pooling technique to condense
global spatial information into a channel descriptor. It
is followed by a compression phase, where a
convolution operation reduces the channel
dimensionality based on a specified ratio, aiming to
learn a compact channel-wise descriptor.
Subsequently, an excitation phase, utilizing another
convolution layer, scales the channel dimensionality
back to its original size, allowing the model to learn a
specific activation for each channel. This scaled
output is then multiplied with the original feature map
to recalibrate the features adaptively, focusing the
model's attention on more relevant spatial regions. In
this YOLOv5 implementation, the SE module is
strategically placed at the end of the backbone
section, following the SPPF layer, to process the
highest-level feature map with a channel count of
1024, right before transitioning to the head of the
model. This placement ensures that the SE module
maximally exploits the hierarchical feature
representations learned by the network, enhancing the
overall detection performance by providing a more
focused feature set for the subsequent detection
layers.
2.2.3 Loss Function
Choosing the correct loss function is crucial for the
training of deep learning models. For the YOLOv5
object detection task, the loss function is meticulously
designed to handle complex multi-task learning
problems, effectively integrating three key
components: bounding box regression loss,
objectness loss, and classification loss. Each part is
optimized for different requirements of the detection
process.
2
()
box box box
L pred true=−
(1)
The above formula represents the Box Loss, 𝐿
box
,
which measures the discrepancy between the model's
predicted bounding boxes and the actual ground truth
boxes, ensuring accurate localization and sizing of
detected objects. The pred
box
represents the model's
predicted bounding box coordinates, typically
including the center's positions along with the box's
width and height. The true
box
refers to the actual
ground truth bounding box coordinates, which
include the center's positions as well as the box's
width and height, as obtained from the labeled data.
( log( )
(1 ) log(1 ))
obj obj
obj
obj obj
true pred
L
true pred
+
=−
−−
(2)
The above formula denotes the Objectness Loss,
𝐿
obj
, evaluating the precision of the model's assurance
in identifying an object's presence in designated
bounding box, aiming to differentiate between
background and foreground.
The true
obj
represents the ground truth objectness
score for a given region or bounding box in the image.
The objectness score indicates whether the region
contains an object (score of 1) or not (score of 0). This
score is obtained from the labeled dataset during
training. The pred
obj
denotes the model's predicted
objectness score for a given region or bounding box.
Similar to the ground truth, this predicted score aims
to reflect the model's confidence in the presence of an
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
732
object within the region, ranging from 0 to 1, where a
higher score indicates greater confidence.
log( )
cls cls cls
L true pred=−
(3)
The above formula describes the Classification
Loss, which evaluates the model's ability to correctly
classify the detected objects into their respective
categories, using cross-entropy loss between
predicted probabilities and actual class labels. The
true
cls
represents the ground truth classification for a
detected object within an image. Typically, this is
represented by a one-hot vector, in which every
element of the vector is linked to a possible class. The
element marked as 1 signifies the true class to which
the object belongs. For example, in a model trained to
detect cars and dogs, a true classification vector for a
dog might be represented as [0, 1], assuming the first
element corresponds to "car" and the second to "dog".
The pred
cls
denotes the model's predicted
probabilities for each class for a detected object.
Combining these three types of loss, the model's
total loss is calculated as follows:
box box obj obj cls cls
LL L L
λλλ
=++
(4)
The combined loss, as shown, balances the
contributions of Box Loss, Objectness Loss, and
Classification Loss to the overall training process,
allowing YOLOv5 to achieve precise object detection.
The coefficients 𝜆
box
, 𝜆
obj
, and 𝜆
cls
are used to weight
the importance of each loss component, ensuring that
the model is accurately detecting and classifying
objects while maintaining correct bounding box
predictions. This strategic composition of loss
functions enables YOLOv5 to excel in complex
detection tasks by fine-tuning the model's focus
across localization, object presence, and
classification accuracy.
2.3 Implementation Details
In the configuration and training process of the
YOLOv5 model, a series of key implementation
details ensure that the model learns and predicts
optimally. The model's structure and hyperparameters
are specified through designated configuration and
hyperparameter files, defining the architecture and
optimization strategies during training, respectively,
providing essential guidance to the model. In terms
of training strategy, the model is planned to undergo
1000 training epochs, with each batch processing 16
images. This setup directly affects the duration and
efficiency of training. To ensure completion of
training within a limited timeframe while maintaining
effective learning, the input size of images is
uniformly set to 640 pixels, optimizing both images
processing efficiency and reducing computational
resource consumption. To adapt to images of various
shapes and improve processing speed, rectangular
training functionality is enabled, playing a crucial
role in optimizing memory usage and enhancing
processing speed. Simultaneously, to enhance the
model's generalization ability under various
conditions, multiple data augmentation techniques
are implemented, including random rotation,
horizontal flipping, and scaling, effectively
expanding the diversity of the training dataset. To
address overfitting, an early stopping strategy is
implemented, terminating training prematurely if the
validation loss fails to improve over multiple
consecutive epochs, with a patience parameter set to
100 epochs. Additionally, support for resuming
training from the most recent checkpoint enhances the
flexibility of the training process.
3 RESULTS AND DISCUSSION
In this study, a hybrid model that integrates C2f and
SE is employed to train an object detection model.
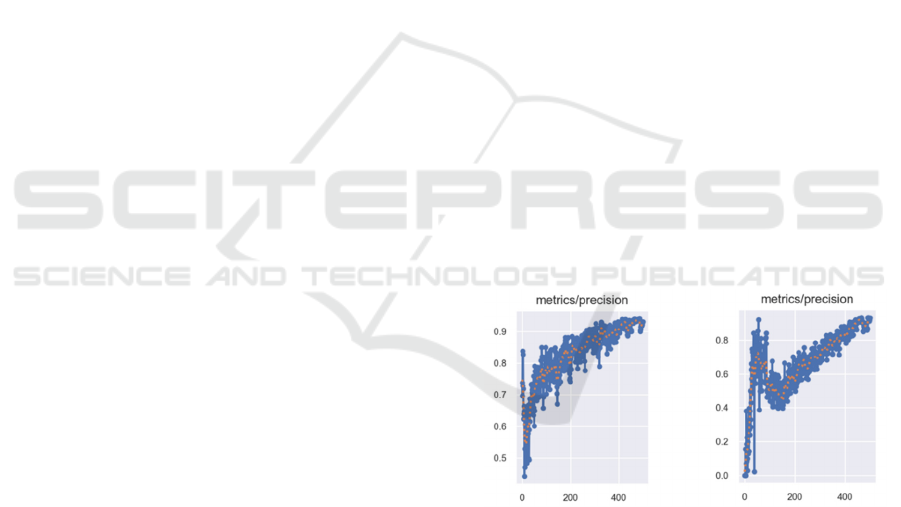
Figure 2 provide a comparative analysis of the
precision between the hybrid model and the model
that only uses SE.
Figure 2: The precision-metrics curves of the two models.
The left is the precision-metrics curve of yolov5-C2f-SE
model and the right is the precision-metrics curve of
yolov5-C2f-SE model (Photo/Picture credit: Original).
The Figure 2 indicates that the model combining
C2f with SE reached a precision of 96% after five
hundred training iterations, while the standalone SE
model peaked at a precision of 91%. Moreover, the
C2f+SE model demonstrated higher initial accuracy,
suggesting it offers a more effective solution for
scenarios requiring a quick start. Additionally, the
model with C2f avoided significant early fluctuations
Refined Object Detection: Integrating C2f and SE Mechanisms in YOLOv5
733
in precision that were observed in the standalone SE
model.
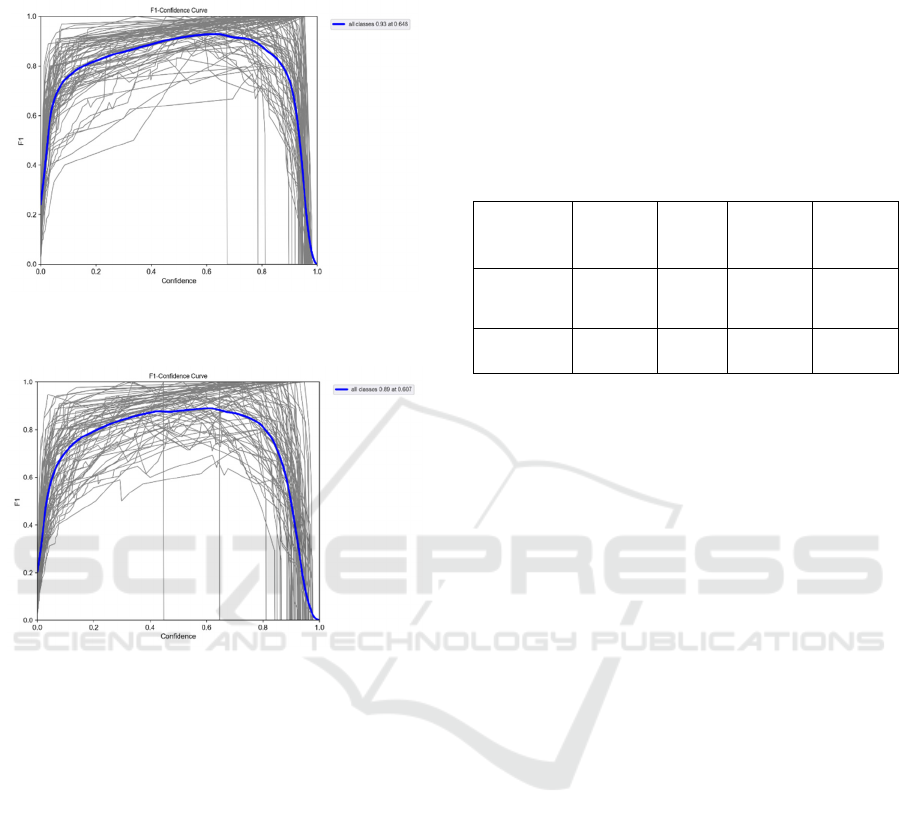
Figure 3:
The F1 curve of yolov5-C2f-SE model
(Photo/Picture credit: Original).
Figure 4:
The F1 curve of yolov5-SE model (Photo/Picture
credit: Original).
As observed from the comparative analysis of the
F1-Confidence curves (Figure 3 and Figure 4), the
hybrid model incorporating C2f and SE modules
demonstrates a marked improvement over the SE-
alone model. Specifically, the hybrid model achieved
an F1 score of 0.93 at the optimal confidence
threshold, indicating a more robust performance in
object detection tasks, as shown in the Table 1. This
enhancement is likely due to the combined model
leveraging both the refined feature extraction of C2f
and the channel-wise attention mechanism of SE,
resulting in a model that is not only accurate but also
stable across varying levels of confidence thresholds.
In summary, the hybrid model integrating C2f
with SE likely outperforms the standalone SE model
due to enhanced feature extraction capabilities. The
C2f architecture is designed to capture both high-
level semantic information and fine-grained details
through its cross-stage partial connections. This
comprehensive feature extraction is beneficial when
dealing with complex datasets, as it allows for better
representation and discrimination of features.
Meanwhile, the SE component focuses on channel-
wise feature recalibration, ensuring that the model
pays more attention to informative features. This
synergy between C2f and SE could lead to improved
precision and a higher F1 score, as the model can
effectively learn and leverage a richer set of features
for prediction.
Table 1: Crucial results of the model.
metrics/p
recision
metrics
/recall
metrics/
mAP_0.5
metrics/
mAP_0.5
:0.95
YOLOv5-
C2f-SE
0.95947
0.91222
0.9738
0.80417
YOLOv5-
SE
0.91187
0.88536
0.94907
0.73297
4 CONCLUSIONS
In this independent study, the primary objective is to
enhance the detection of small-sized objects amidst
complex backgrounds using the YOLOv5
architecture. A novel approach is proposed,
integrating a modified C2f and the SE attention layer
into the YOLOv5 model. This method aims to
optimize the model's feature extraction capabilities by
refining the processing of high-level features and
contextual information, essential for accurately
detecting small objects in challenging environments.
The C2f module, which replaces the traditional CSP
bottleneck with 3 convolutions, reduces
computational complexity and improves feature
fusion. Meanwhile, the SE layer recalibrates feature
channels to emphasize informative features.
Extensive experiments demonstrate the effectiveness
of the proposed method, with the hybrid C2f and SE
model achieving a precision of 93%, outperforming
the standalone SE model's 88% precision. This
indicates a significant improvement in model
accuracy and stability, particularly in complex
detection scenarios. The results highlight the
advantages of combining refined feature extraction
with channel-wise attention mechanisms, ensuring
robust performance across varying confidence levels.
Future research will explore further enhancements
to address the challenges posed by increasingly
complex detection scenarios. This will involve
investigating additional attention mechanisms and
innovative feature fusion strategies to enhance the
model's ability to capture and leverage detailed
EMITI 2024 - International Conference on Engineering Management, Information Technology and Intelligence
734

contextual information, ultimately aiming for greater
accuracy and efficiency in object detection tasks.
REFERENCES
Chen, Y., Zhan, S., Cao, G., Li, J., Wu, Z., & Chen, X. C2f-
Enhanced YOLOv5 for Lightweight Concrete Surface
Crack Detection. 2023. In Proceedings of the 2023
International Conference on Advances in Artificial
Intelligence and Applications pp: 60-64.
Happy, S. L., & Routray, A. 2014. Automatic facial
expression recognition using features of salient facial
patches. IEEE transactions on Affective Computing,
vol, 6(1), pp: 1-12.
Hu, J., Shen, L., & Sun, G. 2018. Squeeze-and-excitation
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pp: 7132-7141.
Lin, T. Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., ... & Zitnick, C. L. 2014. Microsoft coco:
Common objects in context. In Computer Vision–
ECCV 2014: 13th European Conference, Zurich,
Switzerland, pp: 740-755.
Li, Z., Song, J., Qiao, K., Li, C., Zhang, Y., & Li, Z. 2022.
Research on efficient feature extraction: Improving
YOLOv5 backbone for facial expression detection in
live streaming scenes. Frontiers in Computational
Neuroscience, vol, 16, p: 980063.
Mallick, S. 2024. Mastering All YOLO Models from
YOLOv1 to YOLO-NAS: Papers Explained.
LearnOpenCV.
Singhania, D., Rahaman, R., & Yao, A. 2023. C2F-TCN: A
framework for semi-and fully-supervised temporal
action segmentation. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Terven, J., & Cordova-Esparza, D. 2023. A Comprehensive
Review of YOLO Architectures in Computer Vision:
From YOLOv1 to YOLOv8 and YOLO-NAS.
arXiv:2304.00501.
Tang, X., Li, Y., Shen, X., He, M., Chen, B., Guo, D., &
Qin, Y. 2022. Automated detection of knee cystic
lesions on magnetic resonance imaging using deep
learning. Frontiers in Medicine, vol, 9, p: 928642.
Zou, Z., Chen, K., Shi, Z., Guo, Y., & Ye, J. 2023. Object
detection in 20 years: A survey. Proceedings of the
IEEE, vol, 111(3), pp: 257-276.
Refined Object Detection: Integrating C2f and SE Mechanisms in YOLOv5
735
