
Unscented Transform-Based Pure Pursuit Path-Tracking Algorithm
Under Uncertainty
Chinnawut Nantabut
a
The Sirindhorn International Thai-German Graduate School of Engineering, King Mongkut’s University of Technology
North Bangkok, 1518 Pracharat 1 Road, Wongsawang, Bangsue, Bangkok, Thailand
Keywords:
Autonomous Vehicles, Automated Driving, Path-Tracking Algorithm, Uncertainty.
Abstract:
Automated driving has become more and more popular due to its potential to eliminate road accidents by taking
over driving tasks from humans. One of the remaining challenges is to follow a planned path autonomously,
especially when uncertainties in self-localizing or understanding the surroundings can influence the decisions
made by autonomous vehicles, such as calculating how much they need to steer to minimize tracking errors.
In this paper, a modified geometric pure pursuit path-tracking algorithm is proposed, taking into consideration
such uncertainties using the unscented transform. The algorithm is tested through simulations for typical road
geometries, such as straight and circular lines.
1 INTRODUCTION
Significant research in the field of autonomous vehi-
cles seeks to reduce injuries and fatalities by fully re-
placing human decision-making in driving. Despite
the recent surge in the popularity of self-driving cars,
research into tracking algorithms - where vehicles at-
tempt to stay close to a desired reference path - has
been ongoing for decades.
Several approaches, including geometry-based,
robust, optimization-based, and AI-based algorithms,
are commonly employed to address this challenge
(Rokonuzzaman et al., 2021). Geometry-based algo-
rithms, such as pure pursuit controllers, remain pop-
ular due to their simplicity. These algorithms rely
solely on geometric information from the vehicle and
its current position relative to the tracked path, al-
lowing timely decisions to handle potential hazards.
Recent tests have applied this algorithm in driver as-
sistance systems (Wang et al., 2017) and agricultural
field tests (Qiang et al., 2021).
However, geometry-based algorithms are most ef-
fective when vehicle limitations are not exceeded,
such as during highway driving or aggressive steering
maneuvers, as demonstrated by (Nan et al., 2021). In
scenarios where vehicle constraints are not fulfilled,
optimization-based algorithms like Linear Quadratic
Regulator (LQR), Model Predictive Control (MPC),
a
https://orcid.org/0000-0002-5767-6023
and AI-based methods - such as neural networks that
can model vehicle behavior more precisely - are of-
ten better suited. In typical cases, such as low-speed
urban traffic, a kinematic bicycle model combined
with geometric-based algorithms is sufficient. For in-
stance, (Lee and Yim, 2023) showed that pure pursuit
algorithms can achieve similar tracking performance
to LQR and MPC in low-friction conditions.
Though considered a traditional method, the pure
pursuit algorithm continues to attract research inter-
est. Much of the work explores optimal ways to
determine the look-ahead distance, measured from
the vehicle’s rear axle to the reference path. Re-
cent studies have also incorporated techniques from
other tracking algorithms into pure pursuit. For exam-
ple, (Li et al., 2023) integrated adaptive pure pursuit
to enhance path planning in cluttered environments.
These adaptations incorporate principles from more
advanced tracking algorithms, helping to optimize the
look-ahead distance.
In AI-based methods, (Joglekar et al., 2022) ap-
plied deep reinforcement learning (DRL) to skid-
steered vehicles, enhancing adaptation in nonlinear
off-road scenarios compared to MPC.
Regarding optimization techniques, evolutionary
algorithms are often used. For example, (Wang et al.,
2020) employed the Salp Swarm Algorithm (SSA) to
optimize the look-ahead distance for improved track-
ing, while (Wu et al., 2021) used Particle Swarm Opti-
mization (PSO) to adjust preview distances based on
182
Nantabut, C.
Unscented Transform-Based Pure Pursuit Path-Tracking Algorithm Under Uncertainty.
DOI: 10.5220/0012981400003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 182-189
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
vehicle speed and track curvature. Similarly, (Yang
et al., 2022) assessed lateral and heading errors for
steering optimization, while (Zhao et al., 2024) ap-
plied a biomimetics-inspired adaptive pure pursuit for
agricultural machinery.
Control theory approaches are also used; for in-
stance, (Huang et al., 2020) and (Cao et al., 2024)
utilized PID controllers to optimize steering at low
speeds and for dead reckoning in navigation, respec-
tively. Additionally, (Chen et al., 2018) combined
PID controllers with low-pass filters to stabilize steer-
ing during sudden changes, and (Qiang et al., 2021)
employed fuzzy controllers to calculate the look-
ahead distance based on tractor speed. Finally, (Kim
et al., 2024) adapted the look-ahead distance using
MPC to adjust for path deviation.
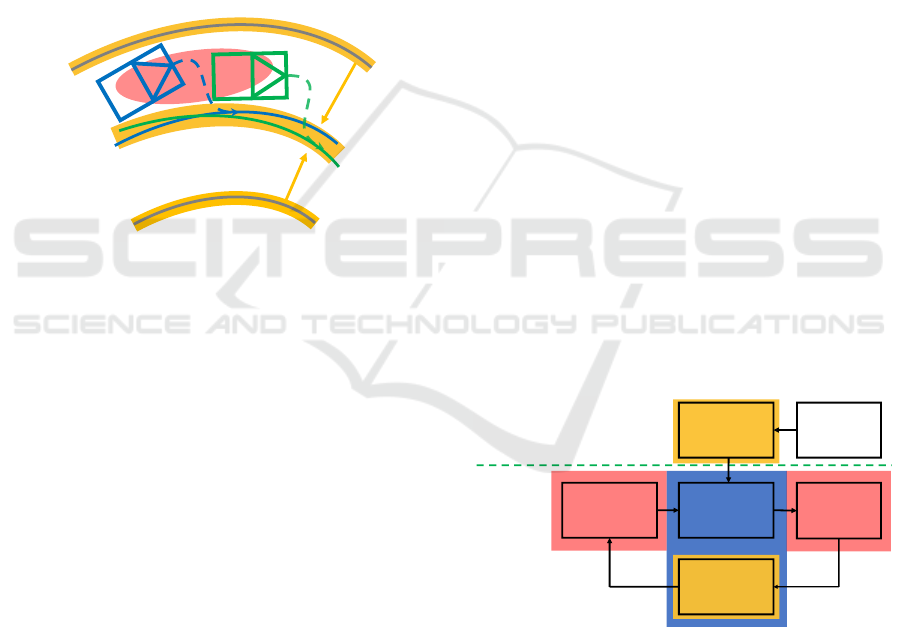
Figure 1: In the path-tracking problem, two types of uncer-
tainty can arise: 1) Localization uncertainty: Represented
by a red confidence ellipse, this uncertainty leads to vari-
ations in the vehicle’s pose (position and orientation), de-
picted by dark blue and green lines. 2) Detection uncer-
tainty: Shown in yellow, this arises from inaccurate identi-
fication of lane boundaries, increasing uncertainty in calcu-
lating the reference path, illustrated by green and blue lines.
One remaining question is how the pure pursuit al-
gorithm performs under uncertainty, as illustrated in
Figure 1. This uncertainty can arise from GNSS inac-
curacies, resulting in various vehicle poses (positions
and orientations). Additionally, the accuracy of deter-
mining the reference path from road boundaries can
be influenced by the sensing capabilities of cameras.
To date, the study by (Kim et al., 2023) is the only
one that addresses pure pursuit under localization un-
certainty. In their approach, they established a 95-
percent confidence interval around the reference path
and computed two possible steering angles based on
the boundaries of this interval. However, relying on
just two options may not be sufficient to calculate the
optimal steering angle in the presence of uncertainty.
This work, therefore, proposes a method to derive
more representative steering angles. Given that lo-
calization noise is often assumed to follow a Gaus-
sian distribution, a more robust approach for deter-
mining them - known as sigma points - can be de-
rived using the unscented transform, a method typi-
cally applied in unscented Kalman filters (Wan and
Van Der Merwe, 2000). These sigma points are non-
linearly transformed based on the vehicle’s geometry
and reference path, and weighted to yield the optimal
steering angle.
Furthermore, the focus is on exploring pure pur-
suit algorithms under uncertainty for common road
types, such as straight and circular lanes (Kiencke
and Nielsen, 2000), with the goal of deriving closed-
form solutions for each road type - something that has
not been previously addressed for pure pursuit algo-
rithms. Clothoid lanes, which connect both straight
and curved lanes, are excluded from this work since
they can be simplified into circular cases. This re-
duction is done by first defining the waypoints us-
ing the method proposed by (V
´
azquez-M
´
endez and
Casal, 2016). A K-D tree is then used to identify the
waypoint closest to the vehicle, approximately corre-
sponding to the look-ahead distance. From this way-
point and its neighbors, the Menger curvature is cal-
culated, and its reciprocal gives the radius of the oscu-
lating circle. The process for circular lanes can then
be applied, as described in the subsequent section.
Additionally, it is assumed that the vehicle is
aware of the type of road it is on. The unscented trans-
form is employed to calculate a reasonably weighted
steering angle for the vehicle. The proposed algo-
rithm will be implemented in a Python environment
to assess its performance and compare its effective-
ness against the original pure pursuit algorithm under
uncertainty across different road geometries.
2.1: Generate
Sigma Points
2.3: Pure
Pursuit
Road
Model
2.4: Calculate
Weighted
Steering Angle
2.5: Update
Pose
Environment
Autonomous Vehicle
Unscented Transform
Kinematic Bicycle Model
Coordinate Transformation
2.2: Coordinate
Transformation
𝛿
𝓧
𝒊
𝓧
𝛿
𝑖
Figure 2: The general workflow of the proposed unscented
transform-based pure pursuit algorithm under uncertainty is
as follows.
2 METHOD
In Figure 2, the interaction between the two systems
- the environment and the autonomous vehicle - is il-
lustrated. The process begins with constructing the
Unscented Transform-Based Pure Pursuit Path-Tracking Algorithm Under Uncertainty
183
environment based on a road model, which consists
of straight or circular lines. The vehicle’s pose, de-
noted as X
X
X , is then defined, and a set of sigma points,
X
i
X
i
X
i
, is generated, as described in Section 2.1. Subse-
quently, the road model is transformed from global
coordinates to the vehicle’s coordinate frame, as ex-
plained in Section 2.2.
These sigma points, along with the transformed
road, are then used to calculate the new steering an-
gles, δ
i
, using a pure pursuit algorithm based on the
kinematic bicycle model, as detailed in Section 2.3.
The weighted steering angle is then computed using
the unscented transform, outlined in Section 2.4. Fol-
lowing this, the vehicle’s pose is updated using the co-
ordinate transformation and the bicycle model (Sec-
tion 2.5), and the process of generating sigma points
is repeated.
In summary, Sections 2.1 and 2.4 incorporate the
unscented transform (highlighted in red), Sections 2.2
and 2.5 involve the use of coordinate transformations
(highlighted in orange), and Sections 2.3 and 2.5 ap-
ply the kinematic bicycle model.
2.1 Unscented Transform: Generate
Sigma Points
As depicted in Figure 1, there are two sources of un-
certainty in this problem: the vehicle’s localization
(V ) and the computation of the reference path (R).
𝜮
𝑽
𝜮
𝑹
𝜮
𝑽
∗
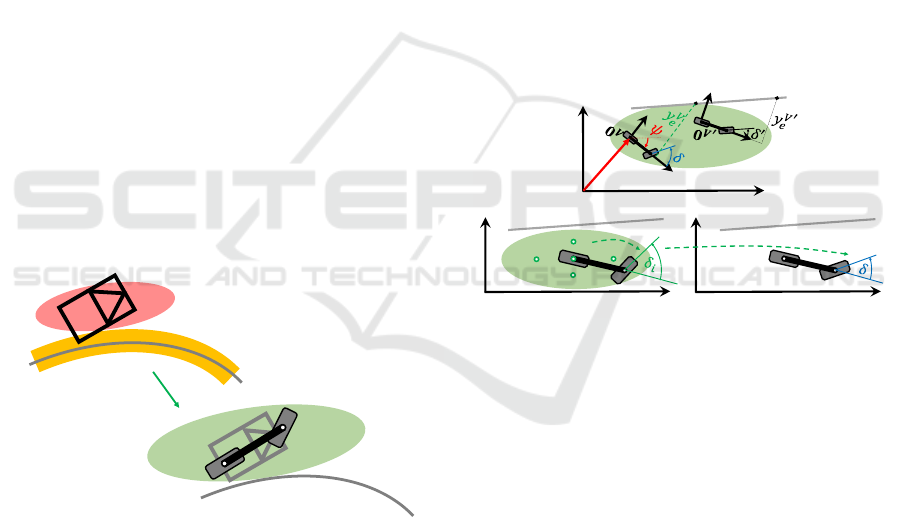
Figure 3: The calculation under uncertainty is simplified by
consolidating the various types of uncertainty—specifically,
the vehicle’s uncertainty (Σ
V
Σ
V
Σ
V
) and the road’s uncertainty
(Σ
R
Σ
R
Σ
R
) - into a single representation centered around the vehi-
cle, denoted as Σ
V
∗
Σ
V
∗
Σ
V
∗
.
As shown in Figure 3, the uncertainties are rep-
resented by their corresponding covariance matrices.
The covariance matrix for the vehicle’s localization is
given by:
Σ
V
Σ
V
Σ
V
= diag(σ
2
x,V
,σ
2
y,V
,σ
2
ψ,V
)
(1)
and is highlighted in red. Conversely, the covariance
matrix for the calculation of the reference path is rep-
resented as:
Σ
R
Σ
R
Σ
R
= diag(σ
2
x,R
,σ
2
y,R
,σ
2
ψ,R
),
(2)
which is highlighted in yellow. Note that diag denotes
a matrix with the provided values as its diagonal en-
tries, with zeros elsewhere. Additionally, σ
x
, σ
y
, and
σ
ψ
represent the standard deviations of the vehicle in
the coordinates x, y, and ψ respectively, assuming in-
dependence between them.
As derived in (Zhu and Alonso-Mora, 2019), if
these uncertainties are independent, we can sum the
two covariance matrices, resulting in the total uncer-
tainty being attributed solely to the vehicle’s localiza-
tion. This resulting covariance matrix is represented
as:
Σ
V
∗
Σ
V
∗
Σ
V
∗
= diag(σ
2
x
,σ
2
y
,σ
2
ψ
)
= Σ
V
Σ
V
Σ
V
+Σ
R
Σ
R
Σ
R
,
(3)
which is illustrated in green. For computational sim-
plification, the complex vehicle is replaced by the
kinematic bicycle model, as depicted in gray in Figure
3.
𝑦
𝐺
𝑥
𝐺
𝟎
𝑮
𝓧
𝒊
𝑥
𝐺
𝑦
𝐺
𝟎
𝑮
𝒕
𝑦
𝐺
𝑥
𝐺
(𝑎)
(𝑏1)
(𝑏2)
𝟎
𝑮
𝒲
𝑖
𝑔
𝑖
Figure 4: Tracking algorithm under uncertainty: (a) Differ-
ent poses result in different tracking errors, denoted as y
V
e
and y
V
′
e
, along with corresponding steering angles, δ and δ
′
.
(b) Unscented Transform: (b1) Different sigma points X
i
X
i
X
i
undergo a nonlinear transformation g
i
, resulting in steering
angles δ
i
. (b2) These angles are then weighted by W
i
to
produce the weighted steering angle δ.
With the incorporation of new uncertainty, the
pure pursuit algorithm is illustrated in Figure 4. The
vehicle’s coordinates are fixed at its rear axle, denoted
by 0
V
0
V
0
V
(x
V
,y
V
), and undergo translation by t
t
t = [x
t
y
t
]
T
and rotation by ψ with respect to the global coordi-
nates 0
G
0
G
0
G
(x
G
,y
G
). Due to the uncertainty Σ
V
∗
Σ
V
∗
Σ
V
∗
, the ve-
hicle can assume multiple configurations, resulting in
multiple possible steering angles δ and δ
′
, as well as
cross-track errors y
V
e
and y
V
′
e
concerning the reference
path in gray, as depicted in 4 (a). Choosing all pos-
sible poses may be impractical. Therefore, according
to (Wan and Van Der Merwe, 2000), 2L
UT
+ 1 sigma
points X
i
X
i
X
i
are selected from the distribution Σ
V
∗
Σ
V
∗
Σ
V
∗
, as
shown in Figure 4 (b1). Note that L
UT
represents the
dimensionality of the pose, which is 3 in this case. Let
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
184

X
X
X = [t
t
t
T
ψ]
T
represent the current pose, which serves
as the ”first” sigma point:
X
0
X
0
X
0
= X
X
X .
(4)
The other 2L
UT
= 6 sigma points are defined as:
X
1...6
X
1...6
X
1...6
= X
0
X
0
X
0
+
p
L
UT
+ λ
UT
· ∆X
j
X
j
X
j
,
(5)
where ∆X
1,2
X
1,2
X
1,2
= ±[σ
x
,0,0]
T
, ∆X
3,4
X
3,4
X
3,4
= ±[0,σ
y
,0]
T
,
∆X
5,6
X
5,6
X
5,6
= ±[0,0,σ
ψ
]
T
, and L
UT
as well as λ
UT
are the
unscented parameters.
These inputs, namely X
0
X
0
X
0
and X
1...6
X
1...6
X
1...6
, will be uti-
lized in the coordinate transformation and unscented
transform steps, employing the bicycle model and
pure pursuit algorithm. Their propose is to calcu-
late the steering angles δ
i
, formulated as g
i
(X
i
X
i
X
i
). Sub-
sequently, these steering angles will be weighted to
form the steering angle δ, as depicted in Figure 4 (b2).
2.2 Coordinate Transformation
Since roads are typically modeled in global coordi-
nates, while the pure pursuit algorithm uses the vehi-
cle’s coordinates to determine the reference point us-
ing the look-ahead distance, the concept of coordinate
transformation is introduced. This involves deriving
equations for converting points from global to vehicle
coordinates, and vice versa. These equations will then
be applied separately for straight and circular roads.
2.2.1 Points
𝑥
𝐺
𝑦
𝐺
𝜓
𝑖
𝟎
𝑮
𝒑
𝑮
↔ 𝒑
𝑽
𝒊
𝒕
𝒊
Figure 5: Transforming a point from the global coordinates,
denoted by p
G
p
G
p
G
, into the vehicle’s coordinates, denoted by
p
V
p
V
p
V
and vice versa.
In Figure 5, an autonomous vehicle is located at po-
sition t
i
t
i
t
i
= [x
t,i
y
t,i
]
T
and oriented at ψ
i
with respect
to the global coordinate system 0
G
0
G
0
G
. This pose can
correspond to one of the sigma points X
i
X
i
X
i
= [t
i
t
i
t
i
T
ψ
i
]
T
.
Let p
G
p
G
p
G
(x
G
p
,y
G
p
) and p
V
i
p
V
i
p
V
i
(x
V
i
p
,y
V
i
p
) represent a point p
p
p de-
scribed in the global and the i-th vehicle coordinates,
respectively. We can then transform p
V
i
p
V
i
p
V
i
to p
G
p
G
p
G
using
the following relationship:
x
G
p
y
G
p
=
cos(ψ
i
) − sin(ψ
i
)
sin(ψ
i
) cos(ψ
i
)
x
V
i
p
y
V
i
p
+
x
t,i
y
t,i
, (6)
or p
G
p
G
p
G
to p
V
i
p
V
i
p
V
i
using the following equation:
x
V
i
p
y
V
i
p
=
cos(ψ
i
) sin(ψ
i
)
−sin(ψ
i
) cos(ψ
i
)
x
G
p
− x
t,i
y
G
p
− y
t,i
. (7)
Utilizing these equations, we can represent the
roads and the sigma points in both coordinates, as will
be discussed in the subsequent sections.
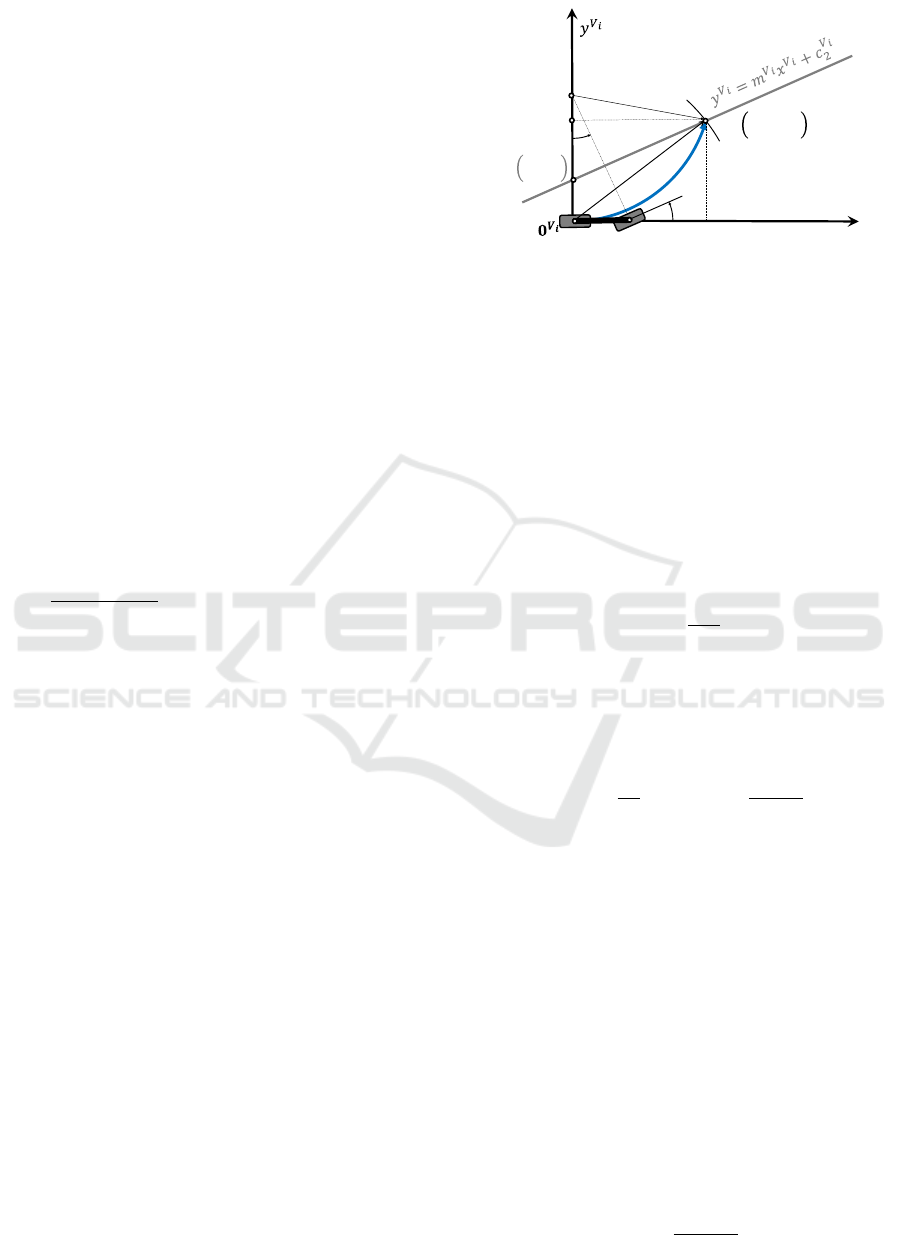
2.2.2 Straight Lines
Figure 6: Transforming a straight line from the global coor-
dinates into the vehicle’s coordinates and vice versa.
Given a straight line depicted in gray, as shown in Fig-
ure 6, it can be described in the global coordinate sys-
tem by:
y
G
= m
G
x
G
+ c
G
1
,
(8)
where m
G
denotes the slope of the straight line in the
global coordinates, while c
G
1
represents the y
G
inter-
cept, indicating where the line intersects the y
G
axis.
The subscript ”1” states that it is located at a specific
point, such as point p
1
p
1
p
1
.
Our task is to transform this straight line into the
i-th vehicle’s coordinate system described by:
y
V
i
= m
V
i
x
V
i
+ c
V
i
2
.
(9)
From Figure 6, it is evident that the intercept in the
y
V
i
coordinate, c
V
i
2
, corresponds to a different point,
denoted by p
2
p
2
p
2
, than point p
1
p
1
p
1
. The slope m
V
i
also
needs to be calculated. It is worth noting that all ideal
or noise-free waypoints must satisfy the line equation
(8).
In the global coordinates, it is evident that:
ψ
G
m
= arctan(m
G
),
(10)
where ψ
G
m
denotes the orientation of the straight line
from the x
G
axis. Upon further investigation into the
vehicle’s coordinates, the slope m
V
i
can be determined
Unscented Transform-Based Pure Pursuit Path-Tracking Algorithm Under Uncertainty
185
analogously using the angle ψ
G
m
and the yaw angle ψ
i
as:
m
V
i
= tan(ψ
V
i
m
) = tan(ψ
G
m
− ψ
i
).
(11)
By utilizing (7), we can transform the point
p
G
1
p
G
1
p
G
1
(0,c
G
1
) into the i-th vehicle’s coordinates p
V
i
1
p
V
i
1
p
V
i
1
as fol-
lows:
p
V
i
1
p
V
i
1
p
V
i
1
=
x
V
i
1
y
V
i
1
=
−x
t
cos(ψ
i
) + (c
G
1
− y
t,i
)sin(ψ
i
)
x
t
sin(ψ
i
) + (c
G
1
− y
t,i
)cos(ψ
i
)
.
(12)
Inserting this equation into the reformulated (9)
yields:
c
V
i
2
= y
V
i
1
− m
V
i
x
V
i
1
= x
t,i
(sin(ψ
i
) + m
V
i
cos(ψ
i
))
+(c
G
1
− y
t,i
)(cos(ψ
i
) − m
V
i
sin(ψ
i
)).
(13)
Using the sum formulas of sine,
sin(A + B) = sin(A) cos(B) + cos(A)sin(B),
(14)
and cosine,
cos(A + B) = cos(A) cos(B) − sin(A)sin(B),
(15)
results in:
c
V
i
2
=
1
cos(ψ
G
m
− ψ
i
)
(x
t,i
sin(ψ
G
m
) + (c
G
1
− y
t,i
)cos(ψ
G
m
)).
(16)
Note that if the straight line is perpendicular to
the x
V
i
axis, this equation will not have a solution. In
other words, the y
V
i
intercept, denoted by c
V
i
2
, cannot
be determined.
2.2.3 Circles
Let a circle be described by its center point
C
G
C
G
C
G
(x
G
C
,y
G
C
) and has a radius of R
C
in the global co-
ordinates. Since the radius does not change, only the
center point is transformed using (7), resulting in:
C
V
i
C
V
i
C
V
i
=
x
V
i
C
y
V
i
C
=
cos(ψ
i
) sin(ψ
i
)
−sin(ψ
i
) cos(ψ
i
)
x
G
C
− x
t,i
y
G
C
− y
t,i
.
(17)
2.3 Pure Pursuit
The objective of this section is to determine the cross-
track error y
V
i
e
and the corresponding steering angle
δ
i
for each sigma point X
i
X
i
X
i
. Employing the bicycle
model within the pure pursuit algorithm, the vehicle
is required to follow a circular path around the instan-
taneous center of rotation (ICR), located at the point
(0,R
i
) in the i-th vehicle’s coordinates, as depicted
in Figure 7 (Coulter, 1992). At the end, it reaches
Figure 7: The look-ahead point D
V
i
in the vehicle’s coor-
dinates also lies along the straight line and is located at a
distance of d
l
from the rear axle.
the look-ahead point D
V
i
(x
V
i
e
,y
V
i
e
), determined by the
look-ahead distance d
l
from the rear axle, resulting in:
d
2
l
= (x
V
i
e
)
2
+ (y
V
i
e
)
2
.
(18)
By considering the triangle formed by points A,
D
V
i
, and ICR, we can establish the relationship:
R
2
i
= (x
V
i
e
)
2
+ (R
i
− y
V
i
e
)
2
= (x
V
i
e
)
2
+ (y
V
i
e
)
2
− 2R
i
y
V
i
e
+ R
2
i
.
(19)
Solving for R
i
yields:
R
i
=
d
2
l
2y
V
i
e
.
(20)
Using the bicycle model, with the triangle formed
by the points ICR, 0
V
i
, and F
V
i
as shown in Figure 7,
we can derive the steering angle δ
i
using the radius
R
i
, the wheelbase L
V
and (20) as follows:
δ
i
= arctan
L
V
R
i
!
= arctan
2y
V
i
e
L
V
d
2
l
!
. (21)
Typically, the adaptive look-ahead distance d
l
can
also be expressed as proportional to the current vehi-
cle speed v
V
with a proportionality constant K
d
, given
by:
d
l
= K
d
v
V
.
(22)
From (21), we only have to calculate the cross-
track error y
V
i
e
to find the steering angle δ
i
. The deter-
mination of this error depends on the geometric type
of road, and its derivation will be done separately as
follows.
2.3.1 Straight Lines
Since (x
V
i
e
,y
V
i
e
) lies on the straight line, as shown in
Figure 7, it must satisfy the reformulated (9):
x
V
i
e
=
y
V
i
e
− c
V
i
2
m
V
i
.
(23)
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
186

In the case where m
V
i
= 0, we have the relation:
y
V
i
e
= c
V
i
2
,
(24)
otherwise, where m
V
i
̸= 0 inserting (23) in (18), solv-
ing the resulting quadratic equation and considering
that x
V
i
e
is positive, we obtain the formula for y
V
i
e
as
follows:
y
V
i
e
=
c
V
i
2
+ m
V
i
q
(1 + (m
V
i
)
2
)d
2
l
− (c
V
i
2
)
2
1 + (m
V
i
)
2
.
(25)
2.3.2 Circles
To calculate the cross-track error y
V
i
e
, we require two
auxiliary angles α
1,i
, and α
2,i
, as can be seen in Fig-
ure 8. By examining the triangle 0
V
i
, D
V
i
, and C
V
i
and
applying the law of cosines, the first angle α
1,i
is ob-
tained as follows:
α
1,i
= arccos
(x
V
i
C
)
2
+ (y
V
i
C
)
2
+ d
2
l
− R
2
C
2d
l
q
(x
V
i
C
)
2
+ (y
V
i
C
)
2
!
.
(26)
There are two solutions for α
1,i
because cos(α
1,i
) =
cos(−α
1,i
). The angle α
2,i
is calculated as:
α
2,i
= arctan
y
V
i
C
x
V
i
C
!
. (27)
To maintain the vehicle’s current direction as
closely as possible, we need to use the smallest an-
gle, determined by α
min
← min|α
2,i
± α
1,i
|.
As a result, this yields the cross-track error y
V
i
e
:
y
V
i
e
= d
l
sin(α
min
).
(28)
Figure 8: Pure pursuit with a look-ahead point, D
V
i
, in the
circle’s circumference as a reference point for the vehicle.
2.4 Calculate Weighted Steering Angle
Let g
i
represent the nonlinear transformation of the
sigma point X
i
X
i
X
i
to the steering angle δ
i
= g
i
(X
i
X
i
X
i
), as de-
picted in Figure 4 (b2). The resulting weighted steer-
ing angle δ can then be obtained as follows:
δ = W
0
δ
0
+ W
1...6
6
∑
i=1
δ
i
,
(29)
where the weights W
i
can be calculated according to
(Wan and Van Der Merwe, 2000):
W
0
=
λ
UT
L
UT
+ λ
UT
,W
1...6
=
1
2(L
UT
+ λ
UT
)
.
(30)
2.5 Update Pose
After obtaining the steering angle δ, we rotate around
the instantaneous center of rotation ICR by the angle
β, using the bicycle model, where T denotes the up-
date time:
β =
v
V
T
L
V
tan(δ),
(31)
which results in the translation:
(t
′
)
(t
′
)
(t
′
)
V
0
=
(x
′
)
V
0
(y
′
)
V
0
= v
V
T
cos(β)
sin(β)
, (32)
and in the orientation in the global coordinates:
ψ
′
= ψ + β.
(33)
Using Equation 7 yields the global position:
(t
′
)
(t
′
)
(t
′
)
G
=
(x
′
)
G
(y
′
)
G
=
cos(ψ) − sin(ψ)
sin(ψ) cos(ψ)
(t
′
)
(t
′
)
(t
′
)
V
0
+
x
t
y
t
.
(34)
Furthermore, the pose X
X
X = [t
t
t
T
ψ]
T
needs to be
updated by drawing from the normal distribution N
with the covariance Σ
V
∗
Σ
V
∗
Σ
V
∗
to account for uncertainties:
X
X
X ∼ N
(x
′
)
G
(y
′
)
G
ψ
′
,
σ
2
x
0 0
0 σ
2
y
0
0 0 σ
2
ψ
!
. (35)
After the pose update, the procedure outlined in
Figure 2 is repeated.
3 SIMULATION
Now, the test scenarios for both straight and circular
roads are defined, and the conventional pure pursuit
as well as the unscented transform pure pursuit algo-
rithms are qualitatively analyzed in the ideal case and
under uncertainty.
3.1 Setup
Implemented in Python, the straight road is defined
as y
G
= 0, with m
G
= 0 and c
G
1
= 0, thus lying com-
pletely in the x
G
coordinate. Otherwise, the circular
road has a radius of R
C
= 5 m and a center point at
(x
G
C
,y
G
C
) = (0,R
C
). In both cases, the vehicle is set to
start at position t
t
t = [0 0.5]
T
m, oriented at ψ = 0
◦
.
The parameters for the unscented transform are
taken from (Wan and Van Der Merwe, 2000), with
Unscented Transform-Based Pure Pursuit Path-Tracking Algorithm Under Uncertainty
187
the dimensionality of the pose being L
UT
= 3, α
UT
=
0.001, and κ
UT
= 0. The look-ahead gain is set to
K
d
= 1 s, similar to (Ohta et al., 2016). The vehi-
cle’s speed is v
V
= 1 m/s, and the vehicle’s length
is L
V
= 1 m. The standard deviations for the sum-
marized uncertainty are σ
x
= 0 m, σ
y
= 0.1 m, and
σ
ψ
= 10
◦
. Note that the lateral distance from the ref-
erence path is also constrained to model the filtering
capabilities, such as those of Kalman filter families, in
suppressing noise. The update time is set to T = 0.1 s.
Here, only a qualitative result analysis is conducted.
3.2 Results
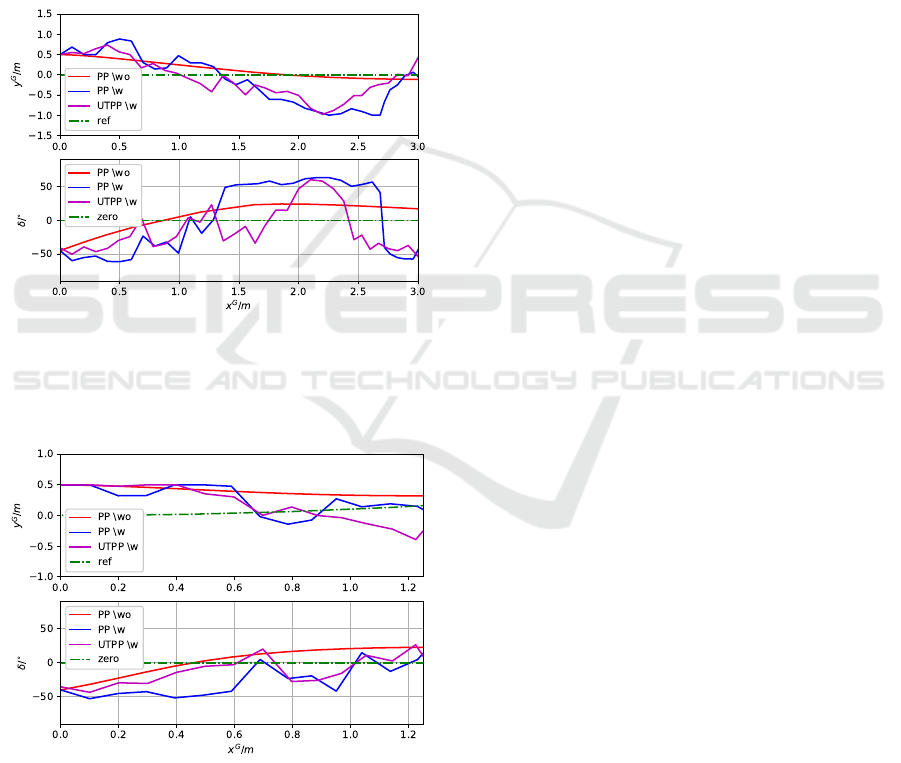
Figure 9: Comparing the paths (x
G
,y
G
) and the steering
angle δ using the unscented transform-based pure pursuit
(UTPP with uncertainty) and the pure pursuit (PP with
or without uncertainty) for straight roads (\wo stands for
”without noise”, and \w for ”with noise”).
Figure 10: Comparing the results for circular roads, evaluat-
ing the paths (x
G
,y
G
) and the corresponding steering angles
δ using the unscented transform-based pure pursuit (UTPP)
with uncertainty and the conventional pure pursuit (PP) with
and without uncertainty.
In Figures 9 and 10, the vehicle’s positions (x
G
,y
G
)
over x
G
are illustrated. Under perfect sensing condi-
tions (denoted as wo), represented by the red tracks,
the vehicle effectively moves toward the reference
path shown in green, converging with oscillations
around it using the original pure pursuit (PP) algo-
rithm. This behavior results from the steering angle
δ calculated by the algorithm, where the vehicle ini-
tially steers right (indicated by a negative steering an-
gle) to stay aligned with the predefined track, given its
initial position is to the left of the path. The steering
angle plot also oscillates around the zero angle, re-
flecting the vehicle’s movement toward a straight tra-
jectory.
When noise is introduced (denoted as w), both the
conventional pure pursuit (PP) in blue and the un-
scented transform-based pure pursuit (UTPP) in ma-
genta demonstrate similar tendencies. Initially, both
algorithms steer the vehicle to the right to approach
the reference path, as indicated by the negative steer-
ing angles. However, the path generated by the un-
scented transform-based pure pursuit appears to con-
verge to the reference path more quickly than that of
the conventional pure pursuit under uncertainty. This
may be attributed to the use of multiple sigma points
(or steering angles) in the UTPP, which aids the ve-
hicle in returning to the track, as opposed to the con-
ventional pure pursuit, which relies solely on a single
calculated steering angle.
However, as the vehicle approaches the track, cer-
tain sigma points may cause it to deviate from the
path, as observed later in the simulation. Techniques
such as varying the look-ahead distance could help
mitigate this behavior, providing a potential avenue
for investigation in future studies.
4 CONCLUSIONS
An unscented transform-based pure pursuit algorithm
is proposed to address uncertainties in tracking ref-
erence paths across various road types. This method
effectively assists in guiding the vehicle back to the
track amidst noise. However, it may inadvertently
steer the vehicle away from the track once the ref-
erence path is reached. This behavior stems from the
algorithm’s current lack of adaptability in determin-
ing the look-ahead distance, which is an area of active
research.
Future improvements will focus on integrating
dynamically changing look-ahead distances to en-
hance the algorithm’s responsiveness. Additionally,
efforts will be made to develop the algorithm to au-
tonomously classify different road types. A gen-
eralized form of cross-track errors will be derived
to accommodate various road geometries, including
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
188

clothoid roads. Furthermore, the integration of the
unscented Kalman filter for state observation will be
explored for more practical applications. Finally, a
quantitative analysis will be conducted to evaluate
the performance and limitations of the proposed ap-
proach.
REFERENCES
Cao, Y., Ni, K., Kawaguchi, T., and Hashimoto, S. (2024).
Path following for autonomous mobile robots with
deep reinforcement learning. Sensors, 24(2).
Chen, Y., Shan, Y., Chen, L., Huang, K., and Cao, D.
(2018). Optimization of pure pursuit controller based
on pid controller and low-pass filter. In 2018 21st In-
ternational Conference on Intelligent Transportation
Systems (ITSC), pages 3294–3299.
Coulter, R. C. (1992). Implementation of the pure pursuit
path tracking algorithm. Technical Report CMU-RI-
TR-92-01, Pittsburgh, PA.
Huang, Y., Tian, Z., Jiang, Q., and Xu, J. (2020). Path track-
ing based on improved pure pursuit model and pid. In
2020 IEEE 2nd International Conference on Civil Avi-
ation Safety and Information Technology (ICCASIT,
pages 359–364.
Joglekar, A., Sathe, S., Misurati, N., Srinivasan, S.,
Schmid, M. J., and Krovi, V. (2022). Deep rein-
forcement learning based adaptation of pure-pursuit
path-tracking control for skid-steered vehicles. IFAC-
PapersOnLine, 55(37):400–407. 2nd Modeling, Esti-
mation and Control Conference MECC 2022.
Kiencke, U. and Nielsen, L. (2000). Automotive Control
Systems: For Engine, Driveline and Vehicle . Springer-
Verlag, Berlin, Heidelberg, 1st edition.
Kim, K.-H., Na, H., Ahn, J., Shin, S., and Hwang, S.-H. H.
(2023). Modified pure pursuit algorithm robust to lo-
calization noise. In 36th International Electric Vehicle
Symposium and Exhibition (EVS36).
Kim, S., Lee, J., Han, K., and Choi, S. B. (2024). Vehi-
cle path tracking control using pure pursuit with mpc-
based look-ahead distance optimization. IEEE Trans-
actions on Vehicular Technology, 73(1):53–66.
Lee, J. and Yim, S. (2023). Comparative study of path track-
ing controllers on low friction roads for autonomous
vehicles. Machines, 11(3).
Li, B., Wang, Y., Ma, S., Bian, X., Li, H., Zhang, T., Li, X.,
and Zhang, Y. (2023). Adaptive pure pursuit: A real-
time path planner using tracking controllers to plan
safe and kinematically feasible paths. IEEE Transac-
tions on Intelligent Vehicles, 8(9):4155–4168.
Nan, J., Shang, B., Deng, W., Ren, B., and Liu, Y.
(2021). Mpc-based path tracking control with for-
ward compensation for autonomous driving. IFAC-
PapersOnLine, 54(10):443–448. 6th IFAC Confer-
ence on Engine Powertrain Control, Simulation and
Modeling E-COSM 2021.
Ohta, H., Akai, N., Takeuchi, E., Kato, S., and Edahiro,
M. (2016). Pure pursuit revisited: Field testing of au-
tonomous vehicles in urban areas. In 2016 IEEE 4th
International Conference on Cyber-Physical Systems,
Networks, and Applications (CPSNA), pages 7–12.
Qiang, F., Xiang, L., Xueyin, L., and Gonglei, L. (2021). An
improved pure pursuit algorithm for tractor automatic
navigation. In 2021 IEEE 4th International Confer-
ence on Information Systems and Computer Aided Ed-
ucation (ICISCAE), pages 201–205.
Rokonuzzaman, M., Mohajer, N., Nahavandi, S., and Mo-
hamed, S. (2021). Review and performance evaluation
of path tracking controllers of autonomous vehicles.
IET Intelligent Transport Systems, 15(5):646–670.
V
´
azquez-M
´
endez, M. E. and Casal, G. (2016). The
clothoid computation: A simple and efficient numer-
ical algorithm. Journal of Surveying Engineering,
142(3):04016005.
Wan, E. and Van Der Merwe, R. (2000). The unscented
kalman filter for nonlinear estimation. In Proceedings
of the IEEE 2000 Adaptive Systems for Signal Pro-
cessing, Communications, and Control Symposium
(Cat. No.00EX373), pages 153–158.
Wang, R., Li, Y., Fan, J., Wang, T., and Chen, X. (2020).
A novel pure pursuit algorithm for autonomous vehi-
cles based on salp swarm algorithm and velocity con-
troller. IEEE Access, 8:166525–166540.
Wang, W.-J., Hsu, T.-M., and Wu, T.-S. (2017). The im-
proved pure pursuit algorithm for autonomous driving
advanced system. In 2017 IEEE 10th International
Workshop on Computational Intelligence and Appli-
cations (IWCIA), pages 33–38.
Wu, Y., Xie, Z., and Lu, Y. (2021). Steering wheel agv
path tracking control based on improved pure pur-
suit model. Journal of Physics: Conference Series,
2093(1):012005.
Yang, Y., Li, Y., Wen, X., Zhang, G., Ma, Q., Cheng, S., Qi,
J., Xu, L., and Chen, L. (2022). An optimal goal point
determination algorithm for automatic navigation of
agricultural machinery: Improving the tracking accu-
racy of the pure pursuit algorithm. Computers and
Electronics in Agriculture, 194:106760.
Zhao, S., Zhao, G., He, Y., Diao, Z., He, Z., Cui, Y., Jiang,
L., Shen, Y., and Cheng, C. (2024). Biomimetic adap-
tive pure pursuit control for robot path tracking in-
spired by natural motion constraints. Biomimetics,
9(1).
Zhu, H. and Alonso-Mora, J. (2019). Chance-constrained
collision avoidance for mavs in dynamic environ-
ments. IEEE Robotics and Automation Letters,
4(2):776–783.
Unscented Transform-Based Pure Pursuit Path-Tracking Algorithm Under Uncertainty
189
