
A Vision Based Warning System for Safe Distance Driving with Respect
to Cyclists
Raluca Brehar
a
, Moldovan Flavia, Attila F
¨
uzes
b
and Radu D
˘
anescu
c
Computer Science Department, Technical University of Cluj-Napoca, Romania
fl
Keywords:
Object Detection, Monocular Depth Estimation, Cyclist Detection, Collision Warning.
Abstract:
Bicyclists are one category of vulnerable road users involved in many car accidents. In this context a frame-
work for driver warning when safety distance with respect to bicyclists is low is developed. The approach
realises on object detection, monocular distance estimation for developing the driver warning algorithm. The
approach was tested on benchmark datasets and on real sequences in which a mobile phone camera was used
for capturing the frames.
1 INTRODUCTION
Creating a warning system for vehicles that are driven
very close to cyclists is an explored area of research
(Ahmed et al., 2019), considering the high number of
traffic incidents in which cyclists are severely injured
due to drivers’ inattention. Therefore, there is a sig-
nificant need for a warning system in the hope that the
number of incidents will decrease as much as possi-
ble.
In this regard, a warning system for drivers is pro-
posed by this work. The proposed approach anal-
yses RGB video sequences captured by either (i) a
standard, mobile dashboard camera mounted in the
car, facing the driving area or by (ii) a fixed camera
mounted on the side part of the road. In the video
sequences the bicycles and vehicles are identified by
using state of the art object detectors, after which
the distances between them are calculated based on
monocular depth estimation techniques. Depending
on the distance maintained by the drivers from the cy-
clists, there will be several overtaking scenarios. For
each overtaking case, warnings will be issued to alert
the driver, prompting them to take actions such as re-
ducing speed. Thus, by reducing speed, the distance
to the cyclist will increase, and the cyclist degree of
safety will increase.
The main contribution of the paper reside in:
• The design and implementation of a driver warn-
a
https://orcid.org/0000-0003-0978-7826
b
https://orcid.org/0000-0002-9330-1819
c
https://orcid.org/0000-0002-4515-8114
ing system that combines classical deep learning
based object detection and monocular depth esti-
mation methods.
• The improvement of the depth estimation algo-
rithm and reduction of computational resources
by the computation of depth information only on
the points belonging to the nearest cyclist with re-
spect to the car.
• Analysis of driver behaviour with respect to safety
distance of bicyclists in fixed camera scenarios
(for surveillance applications).
2 RELATED WORK
In response to the increasing number of traffic acci-
dents that involve cyclists, a lot of articles have been
published exploring the use of machine learning to en-
hance cyclist safety.
For example, the article (Teng, 2022) emphasizes
the importance of prediction and prevention to ensure
rider safety. The article uses machine learning tech-
niques like Faster R-CNN in order to explore how
these technologies can be used to detect vehicles and
also to estimate the vehicle speed and it’s distance
from cyclists. Then provide warnings to riders, so
that the cyclist can understand the vehicle intentions
and be capable to avoid collisions. A two-stage Faster
R-CNN detector is used, so that the cyclist will be
warned ahead of time it the vehicle is speeding up or
slowing down.
190
Brehar, R., Flavia, M., Füzes, A. and D
ˇ
anescu, R.
A Vision Based Warning System for Safe Distance Driving with Respect to Cyclists.
DOI: 10.5220/0012984000003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 190-196
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

(Mohd Fauzi et al., 2018) present a warning sys-
tem with the purpose to alert vehicle drivers on the
existence of cyclists on road. Instead of using object
detection models, RFID (Radio Frequency Identifica-
tion) is used. With RFID, the presence of a cyclist on
the road can be detected and the vehicle driver can be
alerted.
The approach of (Yang et al., 2014) is based on
bicyclist detection in naturalistic driving video. It
proposes a two-stage multi-modal bicyclist detection
scheme that can detect bicyclists with varied poses. A
region of interest where cyclists may appear is gener-
ated and candidate windows are inferred using Ad-
aboost object detector. Having the candidate win-
dows, these are encoded into HOG representation
and using a pre-trained ELM (Extreme Learning Ma-
chine) classifier, the candidate windows will be bicy-
clist or non bicyclist windows.
(Ahmed et al., 2019) presents a review of recent
developments in cyclist detection and also distance
estimation in order to increase safety of autonomous
vehicle.
Advanced Driver Assistance Systems (ADAS)
(Useche et al., 2024) are another solution for prevent-
ing car-rider crashes.
The article concentrates on two questions: if and
how advanced driver assistance systems can con-
tribute to reducing road fatalities among cyclists.
These systems are designed to alert car drivers to the
presence of cyclist in their surroundings. In this way,
the number of crashes can be reduced. In order to
detect the presence of cyclists, technologies like cam-
eras, radar and proximity sensors are used. When the
car driver receives a notification about the presence of
a cyclist, he has the opportunity to slow down or to
wait until overtaking is safe.
There are several type of ADAS like: Forward
Collision Warning (FCW) (Dagan et al., 2004),
which performs real-time analysis of the information
from sensors and issues warnings to the car driver.
The algorithms process data on the speed, position
and direction of the cyclists. Emergency braking with
cyclist detection (Cicchino, 2023), this is an exten-
sion of the FCW, and when a cyclist is detected, this
system can automatically activate the breaks in case
of an imminent collision. The sensors are critical in
these systems, they analyze the presence and move-
ment of the cyclists and it provides rapid responses
in critical situations. Blind Spot Detection (BSD)
(Hyun et al., 2017), uses sensors to detect cyclists in
the car’s blind spots. When a cyclist is detected in
the blind spot and the car driver wants to change lane,
the system issues an alert to prevent the collision. In
this way the risk of collision is reduced when the vis-
ibility is limited. Adaptive Cruise Control (ACC) (Li
et al., 2017) is used to adjust vehicle speed in order
to maintain a safe distance from the cyclist detected
ahead. When the vehicle speed is too dangerous when
approaching a cyclist the speed is automatically ad-
justed to avoid risks.
Another aspect to be considered is related to cy-
clist datasets available for benchmarking the algo-
rithms, we refer to Kitti dataset that contains less than
2000 cyclist instances and the Tsinghua-Daimler Cy-
clist Benchmark (Li et al., 2016).
3 PROPOSED APPROACH
3.1 Processing Pipeline
The proposed processing pipeline is shown in Figure
1. Its main components are the depth estimation mod-
ule, the object detection module which detects bicy-
clists and cars in real-time videos, the 3D reconstruc-
tion module, and the final warning system based on
the monocular depth estimation and distance compu-
tation between car and bicycles.
Before any processing on the frames, a calibration
of the camera was needed. Camera calibration mod-
ule is the first component addressed in the develop-
ment of the warning system for car drivers. This step
is needed in order to correct the distortions introduced
by most cameras. It also improves the measurement
accuracy.
The next component has the role of detecting the
objects of interest, namely cars and bicyclists, and
also to estimate depth from single image. Having the
original image and the depth map, a mapping of 2D
points to 3D points is done and 3D scene reconstruc-
tion data is obtained.
The final step computes the absolute distance in
meters and emits corresponding warning messages
for car drivers based on this distance. Suggestive mes-
sages are displayed on the interface of the applica-
tion. All the time the distance will be displayed on
the screen, even if the distance is respected or not, so
that the car driver can see anytime the distance he is
keeping from the cyclist.
3.2 Depth Estimation
For the depth estimation step, several algorithms were
used and their results analysed in order to see which
one gives the best distance approximation.
The first explored algorithm relies on (Birkl et al.,
2023) (Multiple Depth Estimation Accuracy with Sin-
gle Network). The method consists of an encoder-
A Vision Based Warning System for Safe Distance Driving with Respect to Cyclists
191
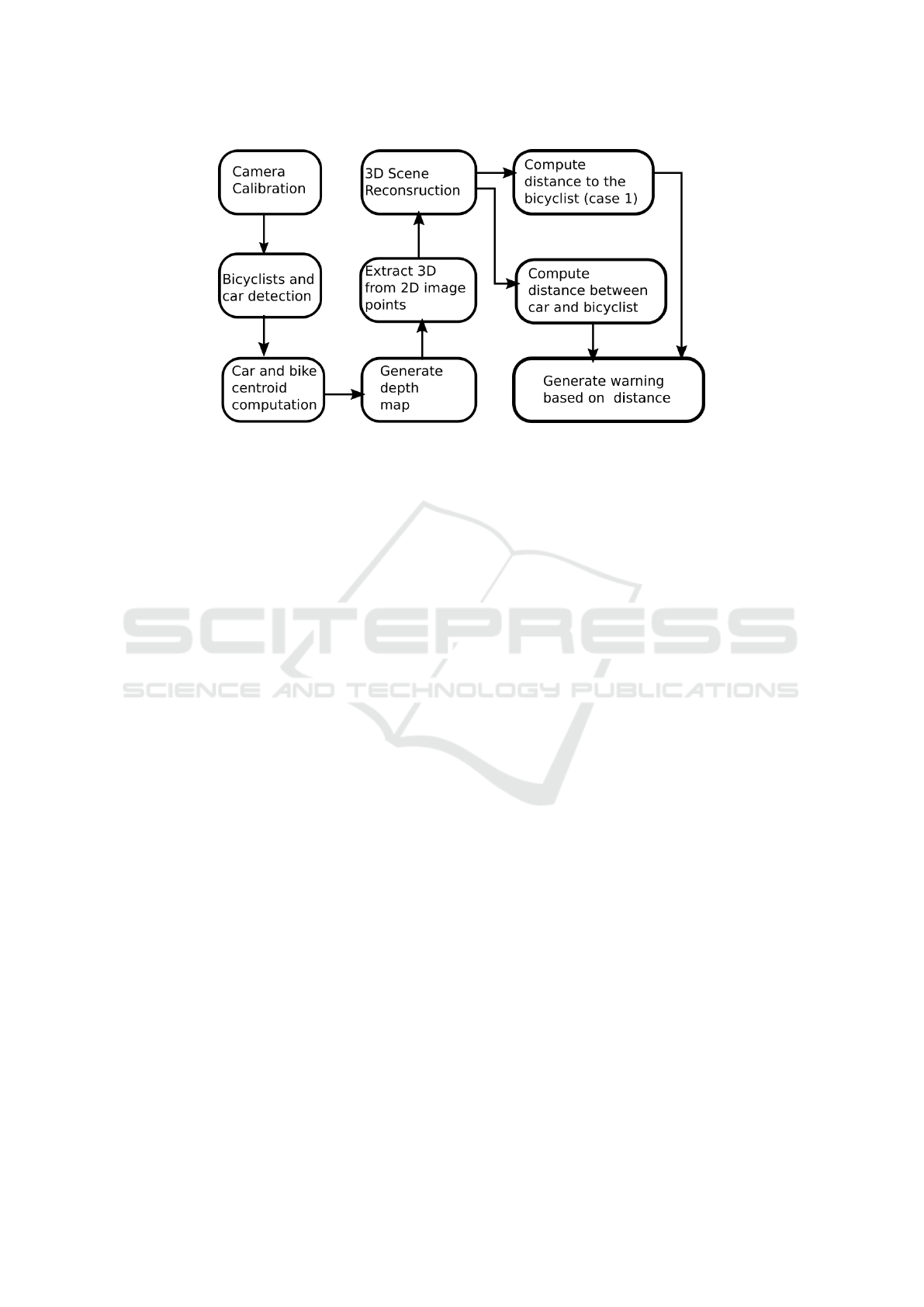
Figure 1: Proposed Processing Pipeline.
decoder architecture where the encoder does high
level feature extraction and decoder does features up-
sampling (Paul and Godambe, 2021) and depth map
generation. Unfortunately this algorithm gives only
a relative depth estimation so it was not suitable for
the proposed method, because of the need of absolute
distance in meters as accurate as possible.
Another explored approach is based on Zoe Depth
(Bhat et al., 2023) algorithm. Built on top of Mi-
DaS, this method gives absolute distance so it is de-
signed to make inferences in metric units. This al-
gorithm brings improvements compared to MiDaS.
Zoe Depth is based on a two-stage framework. First
stage is responsible for relative depth estimation with
an encoder-decoder architecture. The training of the
model is done on different datasets using the same
training strategy as MiDaS uses. The second stage
is trained for metric depth estimation, and gives the
absolute distance between objects.
A third monocular depth estimation approach that
was considered is based on Depth Anything (Yang
et al., 2024).
All three models are trained on indoor scenes and
outdoor datasets like KITTI (Geiger et al., 2013) and
NYUv2 (Nathan Silberman and Fergus, 2012).
3.3 Object Detection
In order to detect objects in real-time traffic video
scenes, a single-stage detector was used, namely
YOLO (Redmon and Farhadi, 2018) (You Only
Look Once). Bikes and persons with high confidence
scores, and and in proximity of each other, are con-
sidered good candidates for bicyclists.
3.4 3D Scene Reconstruction
This step is necessary to estimate the distance when
a car is overtaking a cyclist. Unlike the previous case
when a dashboard camera was used and the distance
to the cyclist in front of the car was estimated, now we
used a fixed camera mounted on the side of the road.
Camera calibration was mandatory before any
processing on frames in order to remove distortions,
as we need accurate measurements of real-world 3D
coordinates from 2D traffic images. With the same
fixed camera we used to take the traffic videos, we
captured around 15 images of a chess board from dif-
ferent positions and angles and we have performed the
calibration.
For this scenario, the object detection algorithm
was used to detect the cars that overtakes a cyclist.
The centroids of the object are considered as repre-
sentative points.For each object of interest (car or cy-
clist) we have the coordinates of the car and the cyclist
from 2D image, the distance estimation is done with
Depth Anything for each point. Hence the last step
was to generate 3D points using the intrisic parame-
ters. The following formulas were used:
Z = Depth(u,v)X = (u − c
x
) ∗ Z/ f
x
(1)
X = (u − c
x
) ∗ Z/ f
x
(2)
Y = (u − c
y
) ∗ Z/ f
y
(3)
where:
• (u, v) represent 2D coordinates of the pixel from
original image
• Depth returns the estimated depth from the depth
map for a specific point
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
192
• (c
x
,c
y
) represent the coordinates of the principal
point (the optic center), which is usually in the
center of the image
• ( f
x
, f
y
) are the focal length on X axis and Y axis
Having two 3D points, one belonging to the center
of the car and one belonging to the center of the cy-
clist, P
1
(x
1
,y
1
,z
1
) and P
2
(x
2
,y
2
,z
2
), we compute the
Euclidean distance between the two points.
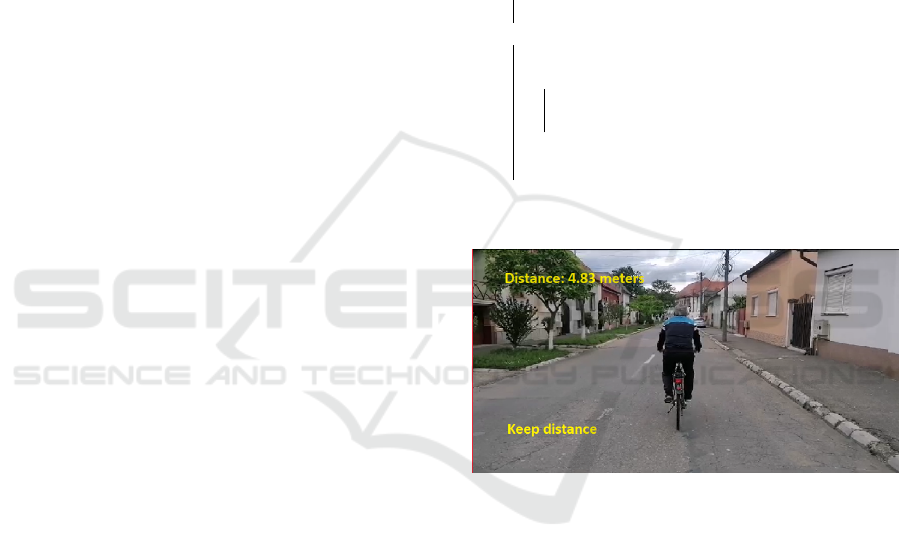
3.5 Driver Warning Algorithm
After detecting the bicyclist in real-time traffic video
captured by dash cam, the depth estimation algorithm
is run and the car driver will be able to see on the
screen the remaining distance to the cyclist in front
of him. In order to display the distance in the most
attractive way to capture the driver’s attention, the
driver warning algorithm presented listing 1. At this
point we take into account the traffic code 2024 so that
the driver will know at any moment if he is keeping
the legal distance from the cyclist or not.
Also for the second perspective when the fixed
camera is used, we determined the distance kept by
the car driver when overtaking a cyclist. This dis-
tance too is passed to another driver warning algo-
rithm which takes into account the traffic code and
the legal distance that must be kept. Based on the
laws (legal distance) and the actual distance, we will
categorize the overtakings in legal or illegal.
3.5.1 Warning Algorithm - Approaching a
Cyclist
A dashboard camera was used in order to capture real-
time traffic video frames for this warning algorithm.
It targets situations in which a car is approaching a
cyclist in traffic. The algorithm is presented in Algo-
rithm listing 1.
Before reaching this driver warning algorithm, the
object detection algorithm was performed and only
when a cyclist was detected in front of the car, the
processing went further. Otherwise the process was
stopped, and new frames analysed until a valid cyclist
was detected on the road.
After generating the depth map, the measured dis-
tance was passed to this algorithm. Tree different lev-
els of limits have been defined: namely safety limit
when the cyclist is out of any danger, then warning
limit when the car is getting a little closer, and the
critical limit when the car is way too close.
3.5.2 Warning Algorithm - Overtaking a Cyclist
Overtaking a cyclist is a new perspective, at this point
both car and bike need to be detected and depth map
Data: distance, safety limit, warning limit,
critical limit, messages
Result: warning message according to the
distance
safetyLimit = 10;
warningLimit = 5;
criticalLimit = 2;
messages[”safety”] = ”Distance is within the
safety limits;
messages[”warning”] = ”Keep distance!
Distance is within the warning limits;
messages[”critical”] = ”Critical! Distance is
within the critical limits;
if distance ≥ safetyLimit then
display message[”safety”], color Green;
else
if distance ≥ warningLimit & distance
< safetyLimit then
display message[”warning”], color
Yellow;
end
display message[”critical”], color Red;
end
Algorithm 1: Case 1 - approaching a cyclist.
Figure 2: Displaying warning message - approaching a cy-
clist.
generated. After generating 3D points as presented
in the previous chapter, the computed Euclidean dis-
tance is passed to this algorithm.
Two cases are considered: (i) a legal overtaking,
or (2) an illegal overtaking. The traffic code for 2024
specifies the car drivers must leave at least 1.5 meters
when overtaking cyclists. This distance increases as
the speed increases. In this system the speed of the
car was not taken into account as the focus was on
other aspects, so the legal limit of at least 1.5 meters
was considered. The proposed algorithm is described
in Algorithm listing 2.
A Vision Based Warning System for Safe Distance Driving with Respect to Cyclists
193
Data: distance, legal distance, messages
Result: warning message according to the
distance
legalDistance = 1,5;
messages[”legal”] = ”Legal overtaking;
messages[”illegal”] = ”Illegal overtaking!!!;
if distance ≥ legalDistance then
display message[”legal”], color Green;
else
display message[”illegal”], color Red;
end
Algorithm 2: Case 2 - overtaking a cyclist.
3.6 Datasets
In order to evaluate the results, two datasets were
used. KITTI dataset and a dataset that was captured
for the use-cases envisioned in this paper. Kitti dataset
(Geiger et al., 2013) is most commonly used in eval-
uating computer vision algorithms, for autonomous
driving.
The dataset was collected with multiple sensors
which include high-resolution color and grayscale
cameras. The sensors were mounted on a vehicle.
Also a Velodyne 3D laser scanner and GPS sensors
were used. This dataset is divided in subsets. From
these, we chose the raw data containing synchronized
and calibrated data from all sensors.
The Depth Prediction dataset from category City
which contains a video sequences with cyclists was
also used. This dataset contains the ground truth
depth map for each frame and it’s corresponding orig-
inal image. It contains 93 thousand depth maps. Hav-
ing the ground truth depth map, we have employed
also Zoe Depth and Depth Anything to infer the depth
and compared the predicted values with the real val-
ues.
For evaluating the accuracy of the distance mea-
sured when overtaking a cyclist, so the distance be-
tween the car and the cyclist, the 3D Velodyne point
clouds (also provided by Kitti dataset) were used.
There are over 100k points per frame and for each
point we have the 3D coordinate. Having these, the
Euclidean distance between the car centroid and bike
centroid was computed, this is the real distance. Then
these values were compared with the predicted dis-
tances computed with Depth Anything.
The proposed dataset is composed of several
videos captured with the phone camera. For the first
use case the phone camera was used and we have re-
coded a cyclist riding the bike, simulating a dashcam
approaching a cyclist on the road. For each video
we have measured the real distance with a roll meter.
Then the real distances with the predicted distances
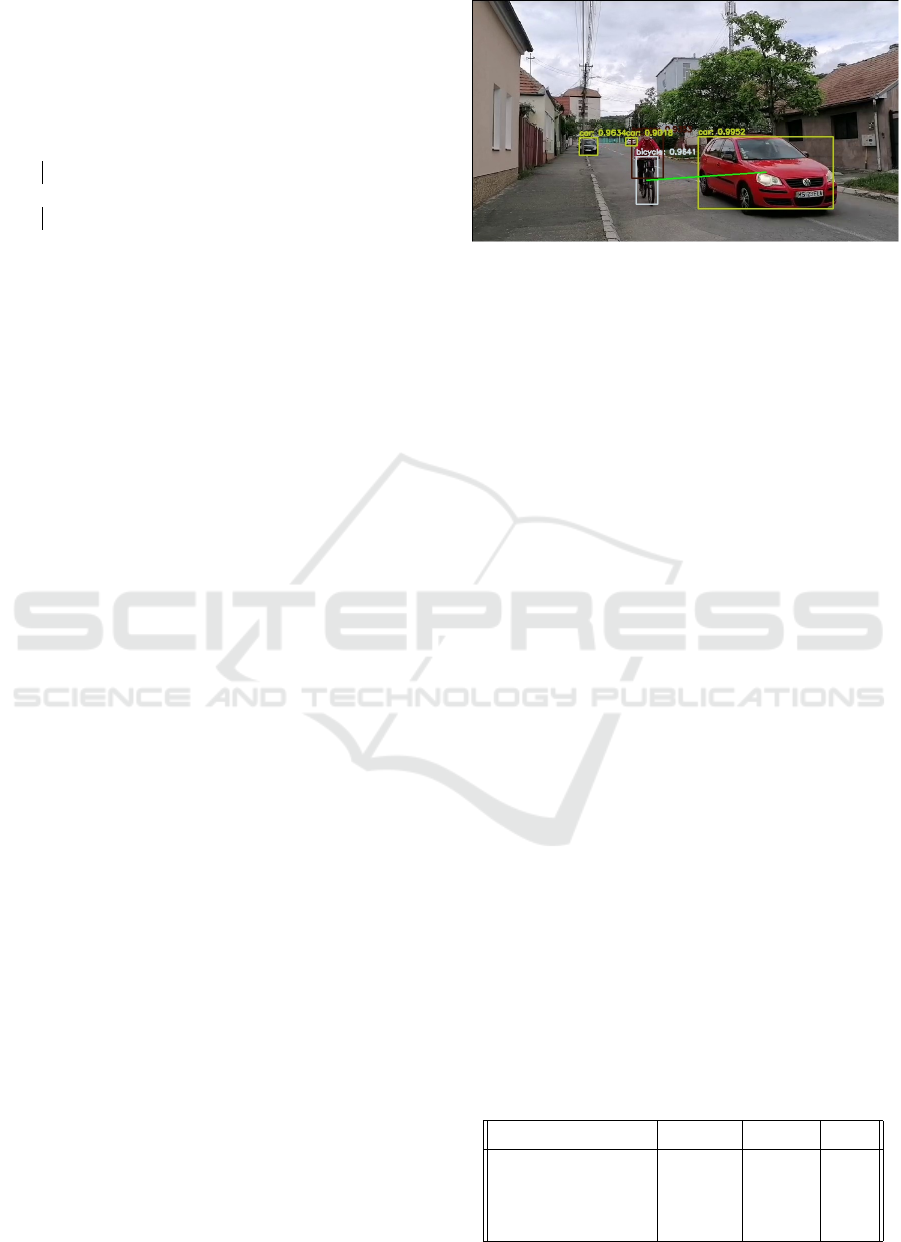
Figure 3: Object detection result.
were compared and some small errors were observed.
For the second use case with the fixed camera on
the side of the road, a cyclist being overtaken by a car
at different distances from 1.4 meters to 3.30 meters
was recorded.
Several legal overtaking and illegal overtaking se-
quences were recorded. When approaching a cyclist,
we made sure that the cyclist was approached at dif-
ferent distances from 2 meters to 10 meters, so we can
see all the warning messages from the warning sys-
tem. We have frames where the car driver keeps the
safe distance and a couple of frames when the safe
distance is not respected.
3.7 Object Detection Results
In Figure 3 we can see the object detection results
for the second use case when the cyclist is overtaken
by a car. As we can see in this frame multiple cars
are detected but only one is of interest for us, the one
closest to the cyclist. We always choose the car with
the highest confidence.
The video has a total of 341 frames. One of the
frames is the one in Figure 3. The bike is detected
successfully in 301 frames because when the bike is
far away on the road, Yolo is not capable of detect-
ing the bike, but as the bike approaches it is detected
successfully. We computed the accuracy of object de-
tection for car, person and bike.
In Table 1 we can see the precision metric com-
puted for this specific video. Intersection over Union
metric, the accuracy of the detection for the objects
car, person and bicycle.
Table 1: Precision metrics for detecting objects - use case 2
(cyclist overtaken by a car).
Object Bicycle Person Car
Total frames 341 341 341
Correct pedictions 301 335 341
IoU 0.90 0.99 0.99
Accuracy (%) 88 98 100
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
194
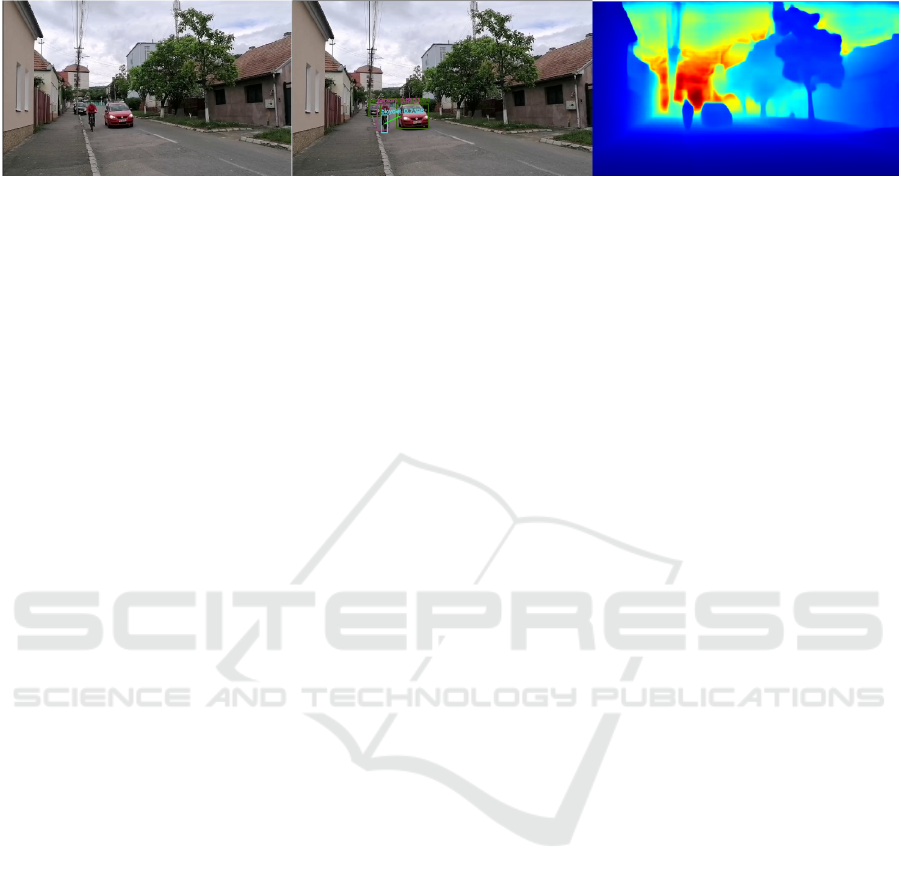
Figure 4: RGB image, detections and depth map - results on the proposed dataset.
3.8 Distance Estimation Results
The predicted distances were tested and validated
on the KITTI dataset and on the proposed dataset.
For distance estimation two methods were used: Zoe
Depth and Depth Anything. First we generated the
depth maps for each method for images from the pro-
posed dataset and for images from KITTI dataset con-
taining a cyclist.
Depth Anything is giving better results than Zoe
Depth as we could see after comparing the predicted
distances with the real distances. Using the dataset
created for the specific use-cases of the paper we ob-
tained an absolute average error of 1.84 meters. With
Depth Anything we obtained an absolute average er-
ror of 0.37 meters.
The results were evaluated before and after the
calibration of the camera. If before the calibration the
absolute average error was of 0.33 meters when cal-
culating the distance between the cyclist and the car,
after calibration the absolute average error was only
0.05 meters.
Using the KITTI dataset and the 3D Velodyne
point clouds the real Euclidean distance between two
3D points was computed and compared with the pre-
dicted distance. In this case the absolute error was
of 0.14 meters. Three different scenarios were con-
sidered from the KITTI dataset containing situations
in which a cyclist was approaching the car, at dif-
ferent distances. One point, the centroid of the cy-
clist was considered, and took from the ground truth
depth map the corresponding depth - distance. Then
run the Depth Anything algorithm on the same im-
ages and extracted the distance from the same three
points. Depth Anything gave an average absolute er-
ror of 0.17 meters.
In Figure 4 some of the final results are presented.
In the first picture from left to right we can see the
original RGB image, then the image with the detected
objects and the corresponding depth map.
4 CONCLUSIONS
Given that the safety situation for cyclists in traffic
in some countries is precarious, the need for a warn-
ing system for drivers is very high. Data shows that
the number of traffic accidents involving cyclists is
significant, with many unfortunately suffering serious
injuries and some even losing their lives. We propose
a model based on state of the art object detection and
monocular depth estimation methods, that warns the
driver if he is approaching a cyclist at a dangerous dis-
tance. We obtained a prototype that further needs to
be extended and tested for several users and real life
urban traffic scenarios.
ACKNOWLEDGEMENTS
This research has been partly supported by the
CLOUDUT Project, cofunded by the European Fund
of Regional Development through the Competi-
tiveness Operational Programme 2014-2020, con-
tract no. 235/2020 and partly supported by a
grant from the Ministry of Research and Innovation,
CNCS—UEFISCDI, project number PN-III-P4-ID-
PCE2020-1700.
REFERENCES
Ahmed, S., Huda, M. N., Rajbhandari, S., Saha, C., Elshaw,
M., and Kanarachos, S. (2019). Pedestrian and cyclist
detection and intent estimation for autonomous vehi-
cles: A survey. Applied Sciences, 9(11).
Bhat, S. F., Birkl, R., Wofk, D., Wonka, P., and M
¨
uller, M.
(2023). Zoedepth: Zero-shot transfer by combining
relative and metric depth.
Birkl, R., Wofk, D., and M
¨
uller, M. (2023). Midas v3.1 –
a model zoo for robust monocular relative depth esti-
mation.
Cicchino, J. B. (2023). Effects of forward collision warning
and automatic emergency braking on rear-end crashes
involving pickup trucks. Traffic Injury Prevention,
24(4):293–298. PMID: 36853168.
A Vision Based Warning System for Safe Distance Driving with Respect to Cyclists
195

Dagan, E., Mano, O., Stein, G., and Shashua, A. (2004).
Forward collision warning with a single camera. In
IEEE Intelligent Vehicles Symposium, 2004, pages
37–42.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. International
Journal of Robotics Research (IJRR).
Hyun, E., Jin, Y. S., and Lee, J. H. (2017). Design and
development of automotive blind spot detection radar
system based on roi pre-processing scheme. Interna-
tional Journal of Automotive Technology, 18(1):165–
177.
Li, X., Flohr, F., Yang, Y., Xiong, H., Braun, M., Pan, S.,
Li, K., and Gavrila, D. M. (2016). A new benchmark
for vision-based cyclist detection. In 2016 IEEE In-
telligent Vehicles Symposium (IV), pages 1028–1033.
Li, Y., Li, Z., Wang, H., Wang, W., and Xing, L. (2017).
Evaluating the safety impact of adaptive cruise control
in traffic oscillations on freeways. Accident Analysis
& Prevention, 104:137–145.
Mohd Fauzi, N. H., Aziz, I. A., and Mohd Jaafar, N. S.
(2018). An early warning system for motorist to detect
cyclist. In 2018 IEEE Conference on Wireless Sensors
(ICWiSe), pages 7–11.
Nathan Silberman, Derek Hoiem, P. K. and Fergus, R.
(2012). Indoor segmentation and support inference
from rgbd images. In ECCV.
Paul, C. and Godambe, M. (2021). Image downsampling &
upsampling.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv.
Teng, R. (2022). Prevention detection for cyclists based on
faster r-cnn. In 2022 International Conference on Net-
works, Communications and Information Technology
(CNCIT), pages 142–148.
Useche, S. A., Faus, M., and Alonso, F. (2024). “cy-
clist at 12 o’clock!”: a systematic review of in-
vehicle advanced driver assistance systems (ADAS)
for preventing car-rider crashes. Front. Public Health,
12:1335209.
Yang, K., Liu, C., Zheng, J. Y., Christopher, L., and Chen,
Y. (2014). Bicyclist detection in large scale natural-
istic driving video. In 17th International IEEE Con-
ference on Intelligent Transportation Systems (ITSC),
pages 1638–1643.
Yang, L., Kang, B., Huang, Z., Xu, X., Feng, J., and Zhao,
H. (2024). Depth anything: Unleashing the power of
large-scale unlabeled data. In CVPR.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
196
