
Man-Machine Teaming: AI’s Overload Management and Task Allocation
Weifei Xie
1,2,3 a
, C
´
edric Herpson
1
, Christophe Cambier
2
and Jean-Marie Dembelle
3
1
Sorbonne Universite, CNRS, LIP6, F-75005 Paris, France
2
Sorbonne Universite, IRD, UCAD,UGB UMI UMMISCO, F-75006 Paris, France
3
Universite Gaston Berger de Saint-Louis, Laboratoire d’Analyse Num
´
erique et Informatique, BP. 234 Saint Louis, Senegal
fi fi fi
Keywords:
Task Planning, Mental Workload.
Abstract:
Sustained concentration can induce cognitive overload in demanding roles such as surgeons and soldiers,
prompting research into workload management via surveys, performance metrics, and physiological mea-
sures. However, these conventional methods face challenges like time-intensive survey processes, unreliable
metrics, and equipment dependency, complicating their application in projects like Recolte, which develops
partially autonomous drone fleets for data collection.To overcome these challenges, we designed an AI-Human
task distribution algorithm that assesses mental workload considering task complexity, duration, and operator
competency. This algorithm also incorporates factors influencing recovery speed, including rest type, operator
state, and environmental conditions. We assessed four recovery models to determine their suitability for our
use case, employing AI for routine tasks to mitigate human workload. Our algorithm aims to optimize team
composition by determining the optimal timing for integrating additional human or advanced AI resources to
ensure mission success. Empirical findings from this study provide insights into the recovery models’ impact
on operational effectiveness, facilitating the analysis of success rates across different task configurations and
operator settings. This method ensures continuous human training, even with the presence of AI operators for
specific tasks.
1 INTRODUCTION
Maintaining a high level of concentration for ex-
tended periods can lead to cognitive overload,
whether for a surgeon, a soldier in combat, or a driver.
Cognitive overload can have a negative impact on
performance, employee productivity, and may even
lead to mission failure (Li et al., 2020). To prevent
overload and optimize performances, it’s necessary
to monitor or estimate worker’s mental workload and
to plan recovery periods. In the Recolte project, we
aim to develop a fleet of semi-autonomous drones
for long-term data collection using different platforms
and both artificial and human pilots. In this context,
our goal in this paper is to measure the impact of the
various recovery models on a mission and to study the
evolution of a mission success rate according to spe-
cific tasks and operators configurations.
In the literature, methods for monitoring mental
workload can be divided into three categories: subjec-
tive measurement using surveys, physiological mea-
surement using equipment and performance measure-
a
https://orcid.org/0009-0008-8866-9855
ment. It is important to note that these categories
are not mutually exclusive. One disadvantage of sur-
veys is their limited applicability in continuous mis-
sions. Physiological measurements require special-
ized equipment not easily usable during a mission.
Performance measurement can be further divided into
primary task measurement and secondary task mea-
surement. Both have several disadvantages, including
insensitivity to variations in mental load, sensitivity
to differences between individuals, unreliability of the
secondary task limit and the addition of extra mental
load. The obstacles mentioned make it difficult to di-
rectly apply these methods for long-term continuous
missions. Rather than monitoring mental workload,
we thus choose to estimate it using mental workload
and recovery models combined with a proposed task
allocation algorithm. Our algorithm also considers
the amount of training required for each mission to
be successful, which is not always a concern in tra-
ditional work-rest balancing planning. Additionally,
our task allocation algorithm is able to test whether
it is possible to execute the mission without cognitive
overload, using both human and AI pilots.
Xie, W., Herpson, C., Cambier, C. and Dembelle, J.
Man-Machine Teaming: AI’s Overload Management and Task Allocation.
DOI: 10.5220/0012984900004562
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Cognitive Aircraft Systems (ICCAS 2024), pages 95-103
ISBN: 978-989-758-724-5
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
95

In section 2 we present the general literature of
mental workloads and recovery models as well as as-
sociated scheduling algorithms. As workload can be
influenced by various factors, section 3 presents four
mental workload and recovery models grounded in
different strand of the literature and adapted to our
application context. We then present our scheduling
algorithm that combines both workload and recovery
criteria in section 4. In section 5 we discuss experi-
mental results comparing the behaviours of the differ-
ent models before concluding.
2 STATE OF THE ART
Xie and Salvendy (2000) suggests that the evaluation
of mental workload should consider several aspects,
including instantaneous workload, peak workload,
average workload, accumulated workload, and overall
workload. Instantaneous workload reflects workload
fluctuations and is typically measured through phys-
iological metrics. Peak workload, which represents
the highest level of instantaneous workload, is criti-
cal for identifying potential mental overload. Accu-
mulated workload is the total workload experienced
during a task, calculated from instantaneous work-
load measurements. Average workload is the mean of
all instantaneous workload values. Overall workload
can be assessed using a mapping function based on
instantaneous workload or another function that con-
siders both average and accumulated workload. These
mapping functions consider the complexity of the task
and individual differences, providing a comprehen-
sive view of the mental demands placed on profes-
sionals in high-stakes environments.
W
peak
= MAX(W
i
(t)) (1)
W
accumulated
(t) =
Z
t
0
W
i
(u)du (2)
W
average
= W
accumulated
(t)/t (3)
(4)
W
overall
= f
1
(W
i
(t)) = f
2
(W
average
(t),W
accumulated
(t))
(5)
In the context of multitasking, it is assumed that
the cumulative workload associated with simultane-
ous tasks is additive in nature (Xie and Salvendy,
2000), as represented by the equation:
W
overall-multi
=
n
∑
i=0
W
overall-i
(6)
This formulation, however, does not account for
the potential mitigating effects of interspersed breaks
between tasks. Extensive research has demonstrated
that breaks can significantly facilitate recovery from
high workload levels. Consequently, a revised model
incorporating the impact of breaks is proposed:
W
overall
=
n
∑
i=0
W
overall-i
+
m
∑
j=0
R
break-j
(7)
In this revised model, R
break-j
represents the reduc-
tion in mental workload attributed to the jth break.
The efficacy of these breaks in reducing mental work-
load is influenced by various factors, including the
nature of the relaxation activity undertaken during
breaks, the surrounding environment, and the dura-
tion of the break, among others.
For our project, ”Recolte,” the practical challenges
of deploying physiological measurement equipment
for each pilot to directly assess workload necessitate
an alternative approach. As such, we aim to approxi-
mate the workload through an estimation based on the
workload associated with individual tasks.
2.1 Mental Workload Accumulation
In the study conducted by Xie and Salvendy (2000),
it was articulated that the mental workload is predom-
inantly influenced by the task at hand and the individ-
ual involved. Further elaboration by Hancock et al.
(2021) elucidated that the mental workload is modu-
lated by the chosen work procedure, which is influ-
enced by four pivotal factors: the nature and com-
plexity of the task, the degree of autonomy and the
scope for decision-making allowed by the situational
context, the operator’s level of expertise, and the op-
erator’s current mental state. In the cognitive domain,
processing can be categorized into three distinct lev-
els (Drenth, 1998):
1. Skill-Based Processing: Automatic and highly
practiced actions requiring minimal thought.
They are fast and efficient but susceptible to
attention-related errors.
2. Rule-Based Processing: Applies learned rules to
somewhat familiar situations. They are more
thoughtful than skill-based; useful for semi-
routine situations.
3. Knowledge-Based Processing Engages in novel
situations requiring deep thought and problem-
solving. They are highly flexible and powerful but
slow and demands significant mental resources.
We can thus conclude that with different expertise
the same task can conduct to different workload.
ICCAS 2024 - International Conference on Cognitive Aircraft Systems
96

2.2 Mental Workload Recovery
Numerous studies have demonstrated that incorpo-
rating breaks into the work schedule can signifi-
cantly enhance both employee health and perfor-
mance. This practice can lead to increased produc-
tivity with reduced investment, ultimately benefiting
organizational efficiency. Albulescu et al. (2022) dis-
cusses how work demands deplete psychological re-
sources, which can be replenished during periods of
rest such as sleep, weekends, and vacations. The au-
thor also notes that recovery can occur during shorter
periods of downtime, including lunch breaks, work
breaks, and even brief micro-breaks. Caldwell et al.
(2009) highlights napping as a highly effective non-
pharmacological method for enhancing alertness in
flight pilots. The research also points out the time
required for falling asleep and waking up within des-
ignated nap durations, citing a NASA study which de-
termined that an actual sleep time of 26 minutes out
of a 40-minute nap period is typical. This observation
indicates that napping may not be practical for micro-
breaks because of the associated time constraints, thus
rendering it unsuitable for short breaks. Additionally,
research by Brazaitis and Satas (2023) demonstrates
that a 10-minute break following 50 minutes of work
does not sufficiently mitigate cognitive fatigue, sug-
gesting that such intervals are inadequate for prevent-
ing cognitive decline during longer tasks. Albulescu
et al. (2022) demonstrated that shorter, more frequent
breaks can effectively reduce fatigue levels without
adversely affecting productivity.
Tucker (2003) suggests that the type of relaxation
activity undertaken during a break can influence the
extent of recovery achieved. For instance, engaging in
activities such as taking a short nap (less than 15 min-
utes) or drinking coffee may be more effective at com-
bating sleepiness compared to simply taking a break.
Hoover et al. (2022) conducted an experimental com-
parison of two types of break activities: physical (sta-
tionary biking) and relaxation (progressive muscle re-
laxation). Their findings indicate that relaxation ac-
tivities are more effective in promoting psychological
detachment and relaxation, while physical activities
are superior in replenishing energy levels.
2.3 Work-Rest Balance Scheduling
Another critical approach to preventing overload in-
volves strategic task scheduling. It is essential to de-
velop a plan that avoids overload while simultane-
ously not compromising work efficiency. In Jaber
and Neumann (2010) introduced a mixed-integer lin-
ear programming (MILP) model designed to address
task scheduling issues, incorporating the impact of
human fatigue into the modeling process. The goal
of this MILP model is to enhance productivity while
reducing the physical strain on workers. However,
solving such a MILP problem remains a challenging
task. Zhang et al. (2022) studied task scheduling in
a human-robot collaborative assembly cell with the
goal of balancing job cycle time and human fatigue.
They developed an MILP model for this issue, using
job cycle time as the objective function and imposing
a constraint on maximum human fatigue. To address
the complexity of solving this MILP model, they sug-
gested the use of a genetic algorithm. But to our
knowledge there is currently no task scheduling algo-
rithm taking into account both task difficulty and the
AI ability for the scheduling. Studies such as Zhang
et al. (2022) and Jaber and Neumann (2010) propose
that specific types of work consistently impact hu-
mans in the same manner; however, their approach
does not align with the Project Recolte. For example,
in this project, the complexity of aerial tasks is influ-
enced by factors like wind conditions, the presence
of obstacles, and the number of turns required. Fur-
thermore, whereas other studies may prescribe fixed
tasks for robots, the Recolte project focuses on adapt-
ing tasks based on their difficulty rather than defining
them by type.
To meet this need, we propose an algorithm that
takes into account the type of rest activity, operator
capabilities and task complexity. Our algorithm also
must also take into account the fact that the interven-
tion of AI shoud not negatively affect human learning.
3 PROPOSED MENTAL
WORKLOAD ACCUMULATION
AND RECOVERY MODELS
Drenth (1998) highlighted that mental workload accu-
mulation is affected by the environment, the task, and
the operator. In the context of Recolte, where the op-
erator’s environment remains relatively constant dur-
ing the mission, the primary factors influencing men-
tal workload accumulation are the task and the op-
erator. Consequently, we categorize the flying task
into three levels of difficulty—easy, medium, and dif-
ficult—based on criteria such as the number of turns
relative to the task area, the presence of a guiding rou-
tine, and whether the map is known or unknown. In
addressing the operator dimension of Recolte’s mis-
sion to make drones widely accessible, we recognize
the significant variability in operator expertise. Ac-
cordingly, we classify operators into three distinct cat-
Man-Machine Teaming: AI’s Overload Management and Task Allocation
97

egories based on their skill level: novice, interme-
diate, and advanced. This stratification allows us to
appropriately match task difficulty with operator ca-
pability, facilitating both efficient and effective drone
operation.
3.1 Mental Workload Accumulation
Model
We propose a mathematical model to quantify the
mental workload induced by task i on operator j as
follows:
mw
i
= duration
i
∗ coe f
i j
(8)
• mw
i
represents the mental workload generated by
task i for operator j.
• duration
i
denotes the estimated duration of task i
• coe f
i j
is a predefined coefficient that reflects the
difficulty of task i adjusted for the skill level of op-
erator j. This coefficient ensures that the level of
the operator is appropriately matched to the task
difficulty, such as assigning only difficult tasks to
advanced operators.
3.2 Mental Workload Recovery Model
As introduced in section 2, recovery from mental
workload can be influenced by various factors includ-
ing the operator’s current state, the type of relaxation
activity engaged in, and the duration of the recovery
period. Based on this understanding, we developed
four models, each grounded in different strands of lit-
erature:
1. Linear Model: This model posits a direct, propor-
tional relationship between the intensity and du-
ration of the workload and the required recovery
time. It is based on the principle that recovery
time increases linearly with increases in the cogni-
tive demands of the task. This model can be espe-
cially useful for tasks with predictable and consis-
tent cognitive loads.(Asadayoobi et al., 2023) The
model is defined by the equation R = ε ∗ duration
where ε denotes the recovery speed, duration is
the length of the break , R measures the recovery
of mental workload.
2. Linear Model With Delays: Inspired by Cald-
well et al. (2009), our model recognizes that the
body requires time to initiate the recovery process,
such as the time needed to fall asleep when using
napping as a recovery activity.The model is de-
fined by the equation R = ε ∗ (duration − delay) if
duration > delay or R = 0 if duration <= delay
(delay is a predefined constant).
3. Exponential Model: An exponential model influ-
enced by pre-break mental workload.(Jaber and
Neumann, 2010) The model is defined by the
equation R = F ∗ exp
µ∗duration
, F is pre-break
mental workload level.µ is constant.
4. Quadratic Model: Albulescu et al. (2022)sug-
gested that micro-breaks might be more efficient
than extended breaks. In response, we propose a
quadratic model at
2
+ bt + c to explore this rela-
tionship. Here, a,b,c are coefficients that shape
the recovery function. We set a negative to model
scenarios where shorter breaks yield better recov-
ery, implying a decrease in recovery benefit as
break duration increases. Conversely, to exam-
ine conditions where longer breaks could be more
advantageous, we make a positive, indicating in-
creased recovery efficiency with longer break du-
rations.
4 PROPOSED SCHEDULING
ALGORITHM
Having developed models for both mental workload
accumulation and recovery, it is crucial to consider
Recolte’s objective of enabling novice operators to ef-
fectively execute missions. To achieve this, integrat-
ing artificial intelligence (AI) into the drone systems
to provide necessary assistance becomes essential.
For safety concerns, our algorithm should be ca-
pable of assessing the feasibility of missions given
the human operator’s expertise and the support of AI.
Specifically, the algorithm needs to evaluate:
1. Mission Feasibility: Assess if the human operator
can complete the mission with AI support without
suffering cognitive overload.
2. Risk of Overload: Identify potential mental over-
load risks during the mission.
3. Recovery Model Selection: Recommend an ap-
propriate recovery model based on observed stress
levels and task nature, choosing suitable relax-
ation activities that align with the mission timeline
and operator needs.
4. Dynamic Adjustments: Enable the system to dy-
namically adjust risk assessments and recovery
plans as mission parameters change, such as vari-
ations in task complexity or assignment.
The algorithm should also have the capability to
train human operators, for example, by enabling them
to execute tasks proactively while minimizing the risk
of overload. From there we propose Algorithm (1)
ICCAS 2024 - International Conference on Cognitive Aircraft Systems
98

: Distribution
1
below and introduce the associated
notations :
• W
s
i j
: the mental workload at the start of task i of
the operator j
• W
e
i j
: the mental workload at the end of task i of
the operator j
• W n
i j
: the mental workload will be needed for
complete the rest task attribute from task i for the
operator j. If there is no task assign after task i,
W n
i j
= W
i j
. If there are tasks assigned to operator
j after task i, identify the task c that is the closest
subsequent task to task i, then W n
i j
= W
i j
+W n
c j
• n
d
number of preset difficulty levels
• d
i
difficulty of task i(easy, medium, and difficult
for 1,2,3)
• l
j
level of operator j (novice, intermediate, and
advanced for 1,2,3)
• W
i j
mental workload generate by task i for the op-
erator j
• W max
j
the maximum mental workload an oper-
ator can tolerate without negatively influencing
their performance
In this algorithm, we initially assign tasks to oper-
ators such that the difficulty of each task corresponds
with the operator’s level of expertise—easy tasks to
novice operators, medium tasks to intermediate oper-
ators, and difficult tasks to advanced operators, ensur-
ing not to exceed their maximum workload capacities.
For tasks that remain unassigned, we proceed to allo-
cate these to higher-level operators. However, such
assignments must comply with the specified equation
W max
a
− W
s
ta
> W n
ta
(where the a present operator,
tpresent the task) to ensure that the addition of any
new task does not cause the operator to surpass their
tolerable workload threshold. This approach guar-
antees that all tasks are appropriately assigned while
maintaining operational efficiency and preventing op-
erator overload.
5 EXPERIENCE
5.1 Common Parameter
In this section we explore our model through a case
study inspired by the Project Recolte. Recolte aims to
develop a fleet of partially autonomous solar-powered
1
Source code : https://github.com/xiewf2019/distribut
ion
Algorithm 1: Distribution.
1: Input: agentPool taskPool, recovryModel
2: Output: tabDistribution, riskOverload
3: divide both the agent pool and the task pool based
on their respective levels and difficulty such that
task level i is in taskPool[i]
4: riskOverload = False
5: for i in rangen
d
do
6: for task t in taskPool[i] do
7: for agent a in agentPool[i] do
8: calculate W
s
ta
9: if W
s
ta
+W
ta
< W max
j
assign the task
to agent a, delete the task in taskPool[i], update
W
e
ta
break
10: end for
11: end for
12: end for
13: for i in rangen
d
do
14: update workload necessary list for agent in
agentPool[i]
15: end for
16: for i in rangen
d
do
17: for task t in taskPool[i] do
18: for j in rangei + 1,n
d
do
19: for agent a in agentPool[ j] do
20: calculate W
s
ta
21: calculate W n
ta
22: if thenW max
a
− W
s
ta
> Wn
ta
23: assigning the task to agent a,
delete the task in taskPool[i], update W
e
ta
break
24: end if
25: end for
26: end for
27: end for
28: for i in rangen
d
do
29: update workload necessary list for agent
in agentPool[i]
30: end for
31: end for
32: for i in rangen
d
do
33: if exist task in taskPool[i] then
riskOverload = True
34: end for
35: return tabDistribution,riskOverload
drones designed for prolonged data collection involv-
ing a combination of various platforms and human pi-
lots. Specifically, we analyze the performance of a
drone undertaking 100 consecutive flying tasks, each
lasting approximately 15 minutes without interrup-
tion. The difficulty of each task is randomly assigned
in each trial according to a predefined probability dis-
tribution.
For the operator component, we have examined
Man-Machine Teaming: AI’s Overload Management and Task Allocation
99
various configurations to address the following ques-
tions with application of our scheduling algorithm:
• What are the benefits of integrating an AI, even
at a novice level, compared to relying solely on a
human operator?
• Which recovery model is most suitable for this
scenario?
• If an AI and a human operator with equivalent
skill levels are both involved, will the human op-
erator receive sufficient training?
In the calculations that follow, the units utilized
within the accumulation and recovery model are ex-
pressed as percentages. For instance, if the opera-
tor accumulates a value of 50, this indicates that they
have reached 50% of their maximum capacity. For the
mental workload accumulation coefficients, inspired
by the work in Drenth (1998), we have considered
scenarios where the operator’s skill level is lower than
the task difficulty, rendering the operator unable to
perform the task. In USA Air Carrier Operations Sur-
vey, they mentioned that after 2 hour operation needs
a break, so we consider that for a novice pilot we need
break after 1 hour operation. The coefficients are de-
termined based on the indices i and j, as specified be-
low.
Table 1: Mental workload accumulation coefficients based
on human level jand task difficultyi.
i
j
1 2 3
1 1.5 1.125 0.75
2 - 2 1.5
3 - - 3
With this coefficient we can assumed that after one
hour operation the novice operator will be consider
as overload. Building on the research presented in
Hoover et al. (2022), and recognizing that drone flight
involves greater stress than the e-tasks referenced in
Hoover et al. (2022),according their result they con-
sider that 15 minute break is enough for 30 minute
e-task work, as drone flight is more stress than e-task
so we consider that we need 45 minute to recover for
30 minute flight we have accordingly established the
numerical values for the recovery models:
• µ for exponential model: 0.096 , we take the value
of work Jaber and Neumann (2010) (model 7 in
experience)
• a, b,c for quadratic model: 1/15,0, 0 (model 1
in experience) , 1/30, 0.5,0 (model 2 in expe-
rience), −1/30, 1.5,0 (model 4 in experience),
−1/15,2,0 (model 5 in experience)
• delay for delay model: 3 (model 6 in experience)
• ε for linear model: 1 (model 3 in experience)
For the aspect of mental workload capacity, unlike
other systems, we assume that everyone reaching their
limit will be overloaded. We acknowledge that main-
taining optimal capacity can be challenging, and for
safety reasons, we consider a person to be overloaded
if they reach 80% of their capacity. So we set all the
operator has 80 as mental workload capacity.
The simulation creates a scenario where operators
completes 100 consecutive tasks. In this model, each
task is performed by an operator whose capacity must
not be less than the requirements of the task. If the
assigned operator for a task is at risk of overload, i.e.,
the sum of the cumulative mental workload and the
expected workload exceeds a predetermined thresh-
old and no other operator is available to replace him
or no available operator is capable of completing the
task, the task is considered to be a failure due to the
potential risk of overload. To avoid the effects of ran-
domness and to assess the impact of task difficulty
distributions on the results, 100 tasks with specified
difficulty distributions were generated. The algorithm
was then applied to each set of tasks to assess the risk
of overload. Each distribution was repeated 100 times
to ensure that it was not affected by random varia-
tions.
5.2 Experience and Result
To answer aux questions, in the initial simulation, we
compared three configurations:
• An advanced-skilled individual paired with a
novice.
• An advanced-skilled individual paired with a
novice AI.
• An advanced-skilled individual, a beginner indi-
vidual, and a beginner AI.
The first two configurations assess the impact of re-
placing a human with an AI, while the third config-
uration explores the effects of introducing an AI into
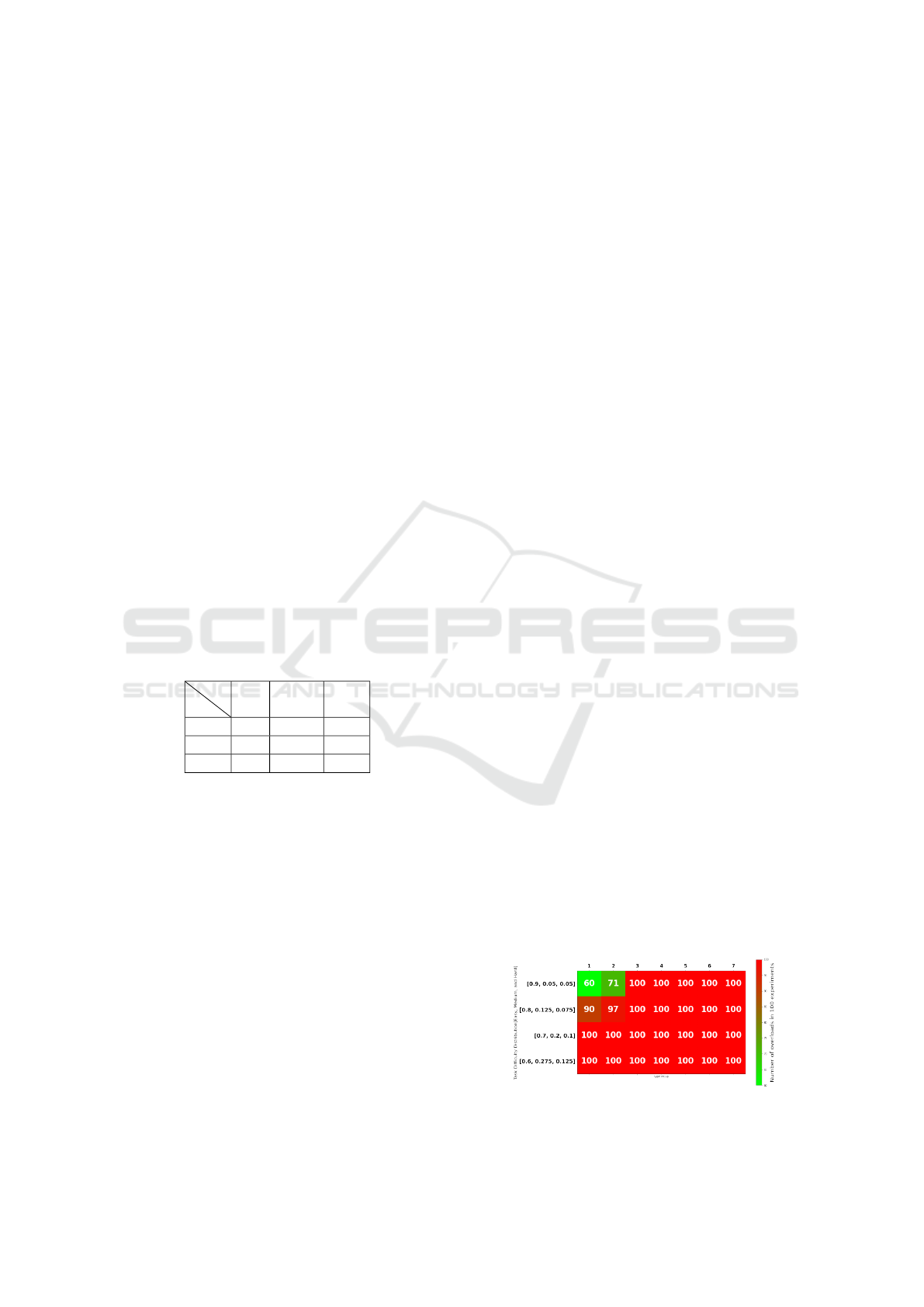
the scenario. In the referenced figure (1), the y-axis
Figure 1: The result with 100 simulation, one human oper-
ator level advanced, one human level novice.
ICCAS 2024 - International Conference on Cognitive Aircraft Systems
100
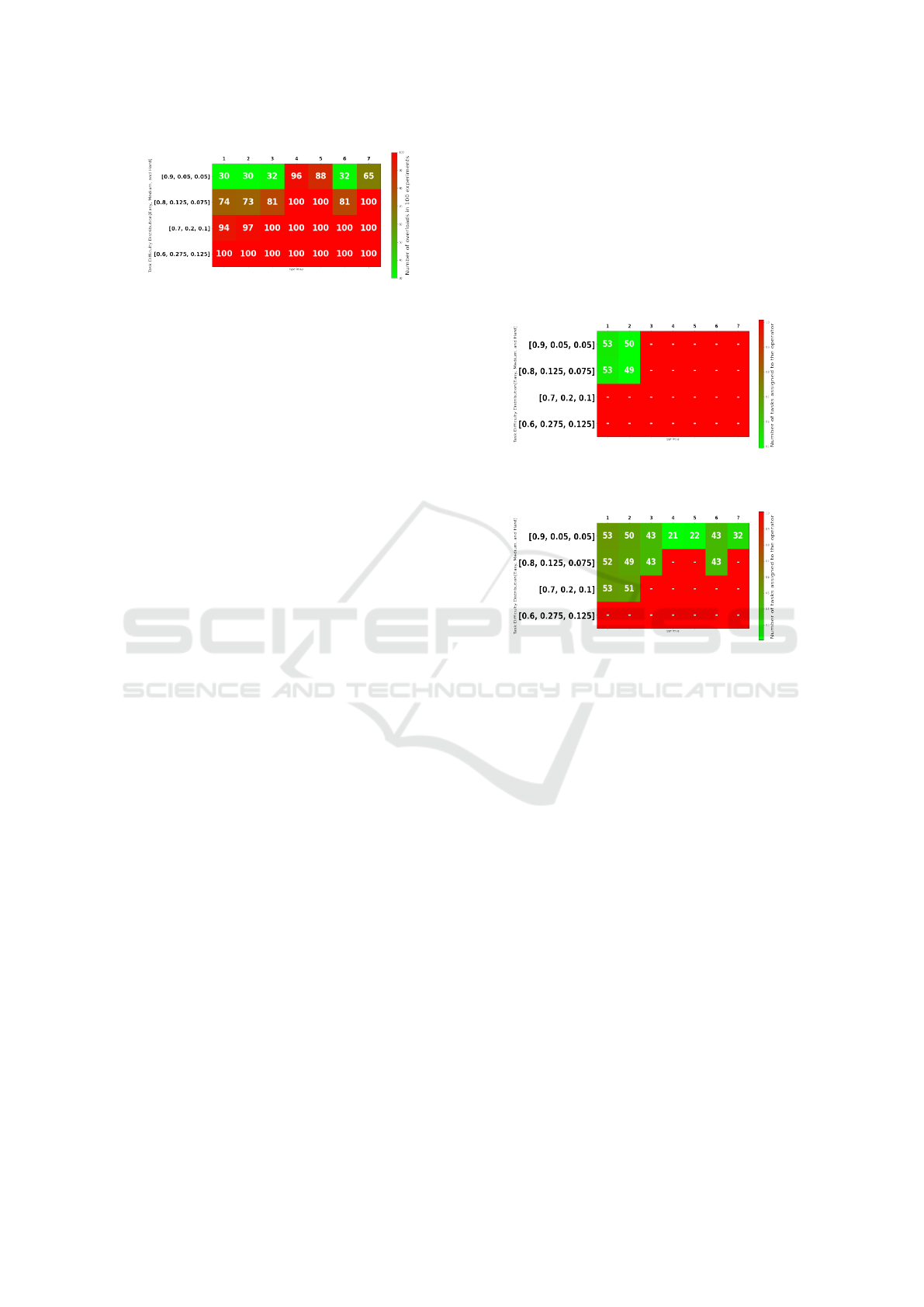
Figure 2: The result with 100 simulation, one human oper-
ator level advanced, one AI level novice.
represents the probability distribution across different
levels of task difficulty, categorized as novice, inter-
mediate, and advanced. For instance, the distribution
[0.9, 0.05, 0.05] signifies a 90% probability of the task
being classified as novice level, a 5% probability for
intermediate, and a 5% probability for advanced level.
The x-axis delineates various types of recovery mod-
els. The numbers displayed on the grid indicate the
frequency, out of 100 simulations, at which the oper-
ator is unable to manage the tasks, signifying a risk
of overload. For example, a value of 54 means that
in 100 simulations, there were 54 instances where the
risk of overload was present.
To address the first question, a comparison of
Figures 1 and 2 clearly indicates that integrating AI
enhances the likelihood of success in simulations.
Specifically, in a scenario where the task difficulty
distribution is [0.9,0.05,0.05] and Model 1 serves as
the recovery model, the AI-integrated configuration
results in 30 failures, compared to 60 failures in the
non-AI configuration. This trend is consistent across
various cases, with AI-assisted configurations outper-
forming those without AI. The benefits of AI integra-
tion are particularly evident when the probability of
encountering difficult tasks is low, significantly reduc-
ing the rate of task failures.
In Figure 1 and Figure 2, we observe that Mod-
els 1 and 2 exhibit fewer instances of overload risk.
Specifically, Figure 1 shows that in 100 simulations,
Recovery Models 1 and 2 register 60 and 71 cases
of overload risk, respectively, while all other models
consistently reach 100 cases of overload. Similarly,
Figure 2 confirms that the risk of overload for Models
1 and 2 is lower compared to other recovery models.
This indicates a potential advantage in the effective-
ness of Models 1 and 2 in managing workload to pre-
vent overload. we conclude that quadratic model with
a positive quadratic coefficient is mostly efficient in
our simulation case. And quadratic model with a neg-
ative a are not suitable for this situation.
Our preliminary findings suggest that the inclu-
sion of AI novices could potentially reduce the risk
of overload, particularly when the probability of en-
countering difficult tasks is relatively low.
To answer the question if both an AI and a human
operator of equivalent skill levels are involved, will
the human receive adequate training, we conducted a
comparative analysis between Figure 1 and Figure 2.
This analysis focused on the proportion of tasks per-
formed by novice operators in two scenarios: one in-
volving both human novices and advanced operators,
and the other incorporating human advanced opera-
tors, and AI novices.
Figure 3: The portion of task assigned to human novice for
the case human novice + advanced.
Figure 4: The portion of task assigned to human novice for
the case human novice + advanced + AI novice.
In figures 3 and figure 4, both the y-axis and x-axis
are identical with figure 1. The numbers displayed on
the grid represent the proportion of tasks assigned to
a human novice in simulations where there is no risk
of overload. For instance, a value of 54 indicates that,
out of 100 tasks, 54 are assigned to the human novice.
In comparing Figure 3 with Figure 4, it becomes ev-
ident that integrating AI not only maintains the need
for training novice operators but also enhances their
capacity to handle more complex missions. This ob-
servation is further supported when analyzing Figure
1 and Figure 2, which demonstrate that the presence
of AI enables less experienced operators to undertake
more challenging tasks. This adaptation indicates a
substantial improvement in both operational capacity
and training efficiency, as AI assists in managing and
mitigating the potential challenges faced by novice
operators in high-demand scenarios.
Man-Machine Teaming: AI’s Overload Management and Task Allocation
101

5.3 Summary of Findings for Each
Question
1. Regarding the first question, the results indicate
that integrating an AI system proves beneficial in
reducing cognitive overload.
2. Concerning the second question, our analysis re-
veals that a quadratic model with positive coeffi-
cients is most appropriate for our case.
3. The results from the third question indicate that
integrating AI into the workflow does not change
the quantity of tasks assigned to trainees. This
demonstrates that the inclusion of AI has no ad-
verse effects on the volume of operational training
tasks.
5.4 Discussion
Our experimental findings affirm the critical role
of AI integration in mitigating cognitive overload.
Nevertheless, addressing overload requires a multi-
dimensional approach that extends beyond AI facil-
itation to include flexibility, learning capabilities, and
unforeseen event management. Crucially, maintain-
ing comprehensive training for human pilots empha-
sizes the imperative of human oversight.
We have identified a quadratic model with posi-
tive coefficients as optimal for our experimental con-
text. Yet, real-world applications necessitate consid-
eration of environmental impacts, feasibility, and ben-
efits associated with downtime activities. Our algo-
rithm not only supports AI assistance but also strate-
gically manages the workload on trainees—essential
in training-centric scenarios. To bolster security and
maintain operational readiness, an AI-first strategy
is recommended, ensuring human operators are pre-
pared to intervene when AI limitations surface.
6 CONCLUSION
This paper studied the tasks scheduling of a Human-
AI collaborative drone-piloting mission. A novel task
scheduling algorithm integrating micro-breaks during
the mission was proposed to schedule necessary re-
covery time for human workers during their working
hours to deal with the human mental workload over-
load while while fulfilling the designated mission.
Experiments show that our method allows to integrate
AI in order to reduce the risk of overload while pre-
serving the training of human pilots. Regarding the
recovery model, results require to be tested with ob-
servation from real-life situations.
REFERENCES
Albulescu, P., Macsinga, I., Rusu, A., Sulea, C., Bodnaru,
A., and Tulbure, B. T. (2022). ”Give me a break!”
A systematic review and meta-analysis on the efficacy
of micro-breaks for increasing well-being and perfor-
mance. PLOS ONE, 17(8):e0272460.
Asadayoobi, N., Taghipour, S., and Jaber, M. (2023). Opti-
mising stochastic task allocation and scheduling plans
for mission workers subject to learning-forgetting,
fatigue-recovery, and stress-recovery effects. Expert
Systems with Applications, 229:120524.
Brazaitis, M. and Satas, A. (2023). Regular short-duration
breaks do not prevent mental fatigue and decline in
cognitive efficiency in healthy young men during an
office-like simulated mental working day: An EEG
study. International Journal of Psychophysiology,
188:33–46.
Caldwell, J. A., Mallis, M. M., Caldwell, J. L., Paul, M. A.,
Miller, J. C., and Neri, D. F. (2009). Fatigue Counter-
measures in Aviation. Aviation, Space, and Environ-
mental Medicine, 80(1):29–59.
Drenth, P. J. D., editor (1998). Organizational psychology.
Number 4 in Handbook of work and organizational
psychology / ed. by Pieter J. D. Drenth. Psychology
Press, Hove.
Hancock, G., Longo, L., Young, M., and Hancock, P.
(2021). MENTAL WORKLOAD. In Salvendy, G. and
Karwowski, W., editors, HANDBOOK OF HUMAN
FACTORS AND ERGONOMICS, pages 203–226. Wi-
ley, 1 edition.
Hoover, C. S., Ragsdale, J. M., and Ayres, T. B. (2022).
An experimental test of resource recovery from phys-
ical and relaxation work break activities. Stress and
Health, 38(3):477–489.
Jaber, M. Y. and Neumann, W. P. (2010). Modelling worker
fatigue and recovery in dual-resource constrained sys-
tems. Computers & Industrial Engineering, 59(1):75–
84.
Li, K., Xu, S., and Fu, H. (2020). Work-break schedul-
ing with real-time fatigue effect and recovery. Inter-
national Journal of Production Research, 58(3):689–
702.
Tucker, P. (2003). The impact of rest breaks upon acci-
dent risk, fatigue and performance: A review. Work &
Stress, 17(2):123–137.
Xie, B. and Salvendy, G. (2000). Prediction of Men-
tal Workload in Single and Multiple Tasks Envi-
ronments. International Journal of Cognitive Er-
gonomics, 4(3):213–242.
Zhang, M., Li, C., Shang, Y., Huang, H., Zhu, W., and Liu,
Y. (2022). A task scheduling model integrating micro-
breaks for optimisation of job-cycle time in human-
robot collaborative assembly cells. International Jour-
nal of Production Research, 60(15):4766–4777.
ICCAS 2024 - International Conference on Cognitive Aircraft Systems
102
APPENDIX
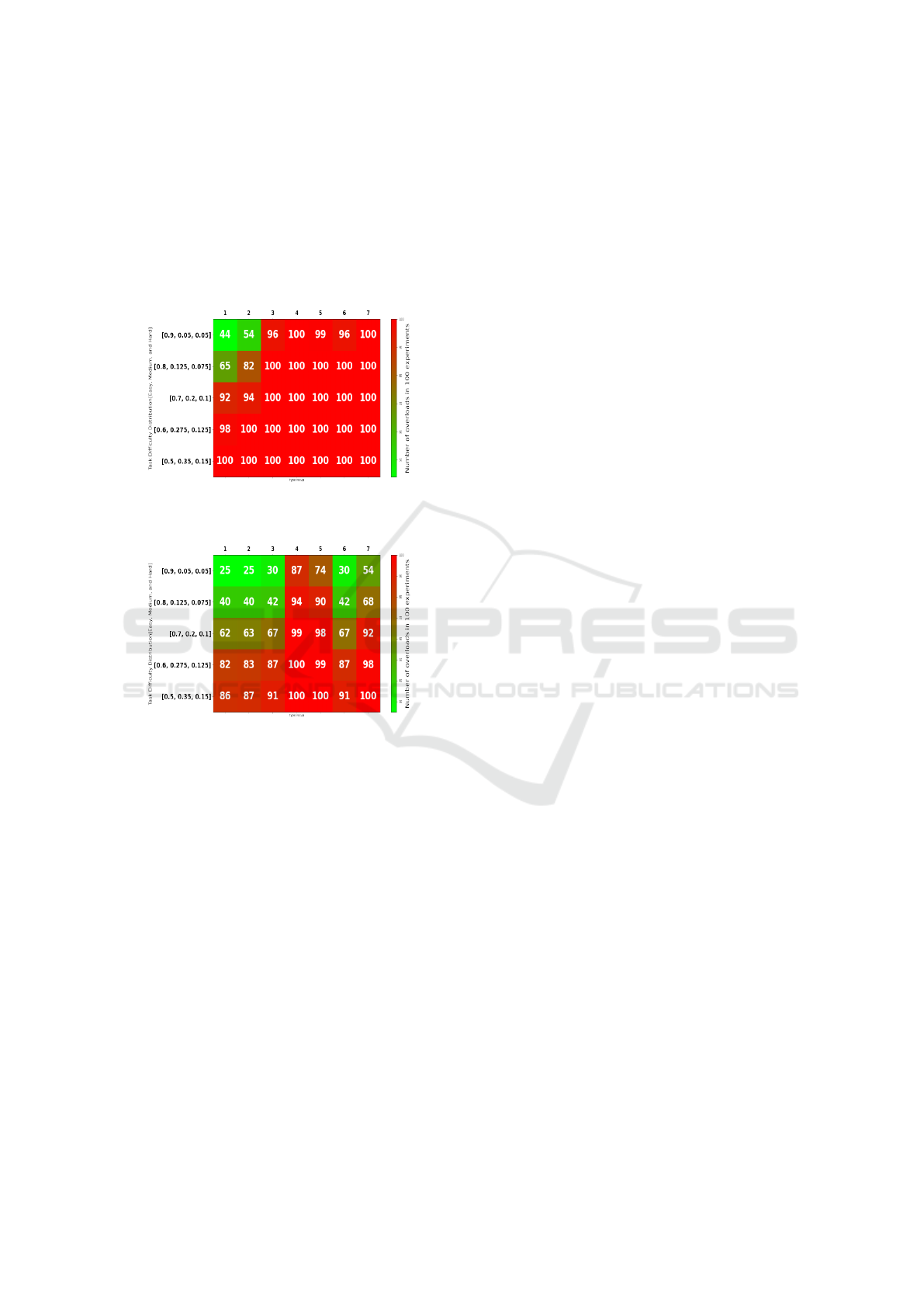
Experience and Result 2
We also have compared other configurations:
• human advanced, human intermediate
• human advanced, AI intermediate
Figure 5: The result with 100 simulation, one human oper-
ator level advanced, one human operator level intermediate.
Figure 6: The result with 100 simulation, one human oper-
ator level advanced, one AI operator level intermediate.
Comparing Figure 2 and Figure 5, it is appar-
ent that a novice AI proves more beneficial than an
intermediate human. Additionally, when assessing
Figure 2 and Figure 6, the benefits of high level AI
in terms of risk avoidance become more pronounced
as the probability of encountering difficult tasks in-
creases. While the improvement may not be signif-
icant at lower probabilities, the value of high level
AI in managing higher-difficulty tasks becomes in-
creasingly crucial as the likelihood of such challenges
grows. We don’t test scenarios involving the insertion
of an advanced AI because it’s clear that such an AI
could handle all tasks efficiently, eliminating the risk
of overload.
Man-Machine Teaming: AI’s Overload Management and Task Allocation
103
