
LiDAR-Based Object Recognition for Robotic Inspection of Power Lines
Jos
´
e M
´
ario Nishihara de Albuquerque and Ronnier Frates Rohrich
Graduate School of Electrical Engineering and Computer Science,
Universidade Tecnol
´
ogica Federal do Paran
´
a (UTFPR), Curitiba, Brazil
Keywords:
LiDAR, Inspection, Autonomous Robot, Power Lines.
Abstract:
This article presents a novel technique using Light Detection and Ranging (LiDAR) sensors implemented in
an autonomous robot for the multimodal predictive inspection of high-voltage transmission lines (LaRa). The
method enhances the robot’s capabilities by providing vertical perception and classifying transmission-line
components using artificial-intelligence techniques. The LiDAR-based system focuses on analyzing
two-dimensional (2D) slices of objects, reducing the data volume, and increasing the computational efficiency.
Object classification was achieved by calculating the absolute differences within a 2D slice to create unique
signatures. When evaluated experimentally with a k-nearest neighbors network on a Raspberry Pi on a
real robot, the system accurately detected objects such as dampers, signals, and insulators during linear
movement experiments. The results indicated that this approach significantly improves LaRa’s ability to
recognize power-line components, achieving high classification accuracy and exhibiting potential for advanced
autonomous inspection applications.
1 INTRODUCTION
The reliability and efficiency of power-line
infrastructure are critical to modern society,
necessitating regular inspection and maintenance
to prevent outages and ensure safety. Traditional
methods for inspecting power lines, which involve
manual inspections or the use of manned helicopters,
are labor-intensive, expensive, and often dangerous.
The advent of autonomous robotic systems offers
a promising alternative for performing detailed
inspections while reducing human risks and
operational costs.
Robotic systems offer unparalleled consistency
and precision, perform repetitive tasks without
fatigue, and operate in environments that are
hazardous or inaccessible to humans. By automating
the inspection process, these robots can conduct
frequent and thorough assessments and identify
potential issues before they escalate to critical failure
(Yang et al., 2020). This proactive approach not
only enhances the reliability of the power supply
but also significantly reduces maintenance costs and
minimizes downtime. Furthermore, the use of robots
can alleviate safety risks associated with manual
inspections, protect the well-being of maintenance
personnel, and ensure compliance with stringent
safety regulations.
Power-line inspections typically depend on
manual processes that are time-consuming, labor
intensive, and dangerous. These methods typically
involve visual inspections conducted by personnel on
foot or using specialized vehicles (Chen et al., 2021).
Although they are effective, they are limited in their
ability to access hard-to-reach areas—particularly in
difficult terrain or adverse weather conditions. The
effectiveness of traditional visual inspection methods
relies heavily on the experience of the inspector,
which limits their reliability for comprehensive
integrity verification.
The emergence of autonomous robotic systems
has provided a transformative solution for these
challenges. Equipped with advanced sensing and
navigation capabilities, these robots can perform
detailed inspections of power lines, significantly
reducing the need for human intervention and
associated risks. Among the various available
sensing technologies, Light Detection and Ranging
(LiDAR) is the most promising. LiDAR systems use
laser pulses to measure distances with high precision
and create detailed three-dimensional (3D) maps of
the environment. When integrated with advanced
object-recognition algorithms, LiDAR-equipped
robots can assess the conditions of power lines,
insulators, and other critical elements with high
reliability (Zhang et al., 2022; Qin et al., 2018).
Nishihara de Albuquerque, J. M. and Rohrich, R. F.
LiDAR-Based Object Recognition for Robotic Inspection of Power Lines.
DOI: 10.5220/0012985800003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 197-204
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
197

The complexity of a power-line environment
presents unique challenges for object recognition.
Factors such as varying weather conditions,
dense vegetation, and the presence of multiple
overlapping objects necessitate robust and adaptable
recognition systems. Incorporating artificial
intelligence (AI) into LiDAR-based robotic systems
enhances their capability to recognize and classify
objects in complex power-line environments. AI
algorithms—particularly those based on machine
learning—can be trained on vast datasets to identify
various components and anomalies accurately. These
algorithms learn to discern subtle patterns and
features in LiDAR data, improving their accuracy
and reliability over time. By continuously updating
the models with new data, the system can adapt to
changing conditions and maintain high performance.
The combination of AI and LiDAR technology allows
the development of intelligent inspection systems
that not only detect issues but also predict potential
failures, facilitate timely interventions, and reduce
the likelihood of power outages.
This article presents an advanced technique for
inspecting power lines wherein LiDAR sensors
are used to accurately detect transmission-line
components. The method was implemented in
an autonomous robot for the multimodal predictive
inspection of high-voltage transmission lines (LaRa)
to enhance the capabilities of a multimodal inspection
sensor. The integration of LiDAR technology
provides vertical perception of the elements on
adjacent transmission lines. Object classification was
performed using various AI techniques with the aim
of identifying the most precise method for evaluating
actual transmission-line elements. The proposed
approach concentrates on examining a single 2D
cross-section of the object, which greatly minimizes
the amount of data and enhances computational
performance.
The remainder of this paper is organized as
follows. Section 2 discusses related work to clarify
the contributions of the present study. Section
3 describes the concept of the LaRa inspection
robot. Section 4 presents the proposed approach for
LiDAR-based object recognition and the experiments.
Finally, Section 5 presents conclusions.
2 RELATED WORK
The integration of LiDAR technology into robotic
inspection systems has attracted considerable
attention in recent years, with studies demonstrating
its potential to revolutionize power-line maintenance
(Alhassan et al., 2020). (Korki et al., 2019)
discussed the challenges of using unmanned aerial
vehicles (UAVs) in power¬line inspection and fault
detection, along with solutions. They presented three
conceptual designs that incorporate AI and efficient
sensors for high-precision fault detection. These
designs use thermal sensors and secure cloud-based
communication for data transfer.
LiDAR sensors are widely used in UAV
inspections of power lines to create detailed maps.
(Chen et al., 2022) proposed a diffusion-coupled
convolutional neural network for real-time detection
of power transmission lines using UAV-borne LiDAR
data. (Jenssen et al., 2018) addressed the limitations
of the current manual and helicopter-assisted
methods for power-line inspection, highlighting
concerns regarding cost, speed, and safety. This
review covers existing research on automating
this process using UAVs, robots, and AI-driven
vision systems, emphasizing the requirement for
high accuracy. The proposed approach focuses on
employing UAVs for inspection, utilizing optical
images as primary data, and leveraging deep learning
for analysis to advance autonomous vision-based
inspections in the power sector.
(Paneque et al., 2022) discussed power-line
inspection using a reactive-quadrotor-based online
system. In contrast to traditional methods involving
two-stage processes (data collection and offline
analysis), this system constructs a real-time 3D map,
evaluates data quality on the fly, and adjusts flight
to enhance the resolution as needed. The use of
LiDAR sensors for UAV inspection of transmission
lines primarily focuses on creating maps for
subsequent segmentation and classification, utilizing
the sensor’s capability for 3D depth perception in
visual processing.
These studies highlight the transformative
potential of LiDAR technology for power-line
inspection and maintenance. They address critical
aspects, including fault detection, UAV integration,
advanced object recognition, multisensor fusion, and
real-time monitoring, laying a solid foundation for
further advancement. LiDAR sensors are typically
used for surface mapping. This study introduces
a novel approach involving LiDAR-based object
recognition for power-line inspection, which can be
integrated into a multimodal inspection approach as a
complementary component.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
198
3 LaRa: AUTONOMOUS ROBOT
FOR MULTI-MODAL
PREDICTIVE INSPECTION OF
HIGH-VOLTAGE
TRANSMISSION LINES
The inspection is performed autonomously using
a mobile robot that moves over electrical cables.
The autonomous robot for the multimodal predictive
inspection of high-voltage transmission lines (LaRa)
is designed to attach to the cable and move with
precision, carrying the multimodal inspection system,
as shown in Figure 1.
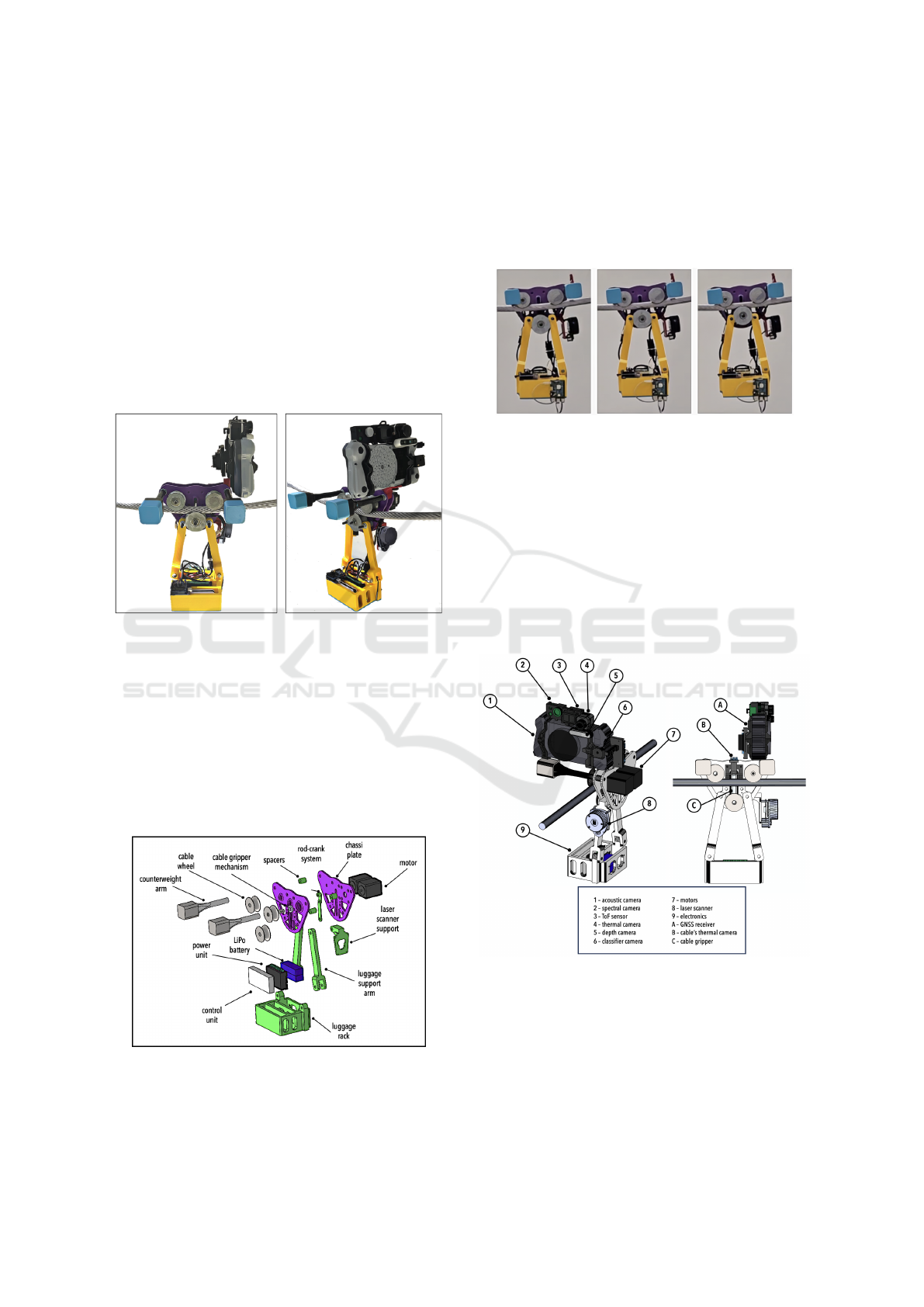
Figure 1: The Autonomous Robot for Multi-Modal
Predictive Inspection of High-Voltage Transmission Lines.
Two wheels are used to ensure support on the
electrical cable: one wheel is free, and the other is
driven by a servomotor, as shown in Figure 2. The
third wheel is part of a connecting rod–crank system
that moves the non-actuated wheel toward the cable,
maintaining a clamping pressure similar to that of a
robotic claw. This wheel can also move linearly away
from the cable, allowing the robot to be removed and
perform obstacle suppression maneuvers.
Figure 2: Exploded view of LaRa robot.
The cable-gripper system is mounted on a
structure consisting of two parallel plates separated
by fixed spacers. Between these plates, a connecting
rod–crank system moves the fixing wheel at the
bottom of the cable. The motors are fixed to the front
part of the claw, which interferes with the stabilization
of the system on the cable, leading to rotation around
the cable and potential falls.
Figure 3: Cable-gripper system in action.
The LaRa robot features a lower luggage rack
fixed with two articulated arms to ensure that the
weight is always directed toward the gravitational
force at the center of the cable gripper. The luggage
rack houses the electronic control system, motor
power, control system, and battery of the robot.
The center of mass of the system is aligned with
the cable center, which is achieved by introducing two
counterweight arms. One of these arms also serves
as a support for the attachment of the multimodal
inspection sensor.
Figure 4: Modules of LaRa robot.
High-voltage transmission lines are inspected
using a multimodal sensor specially designed for
predictive inspection. The sensor consists of several
subsensors (Figure 4), including an acoustic camera,
a spectral camera, a ToF sensor, a thermal camera, a
depth camera, and a classifier camera. All the sensors
are integrated into a stacked inspection map. This
LiDAR-Based Object Recognition for Robotic Inspection of Power Lines
199
approach is detailed in a previous work (hidden for
blind review).
The LaRa robot also features a specially placed
LiDAR sensor (Figure 4, item 8) to track objects in
a plane below the robot. This information is crucial
for analyzing the distance between transmission-line
elements and vegetation. It is also correlated with the
acoustic faults detected in the robot’s interior plane.
4 THE LiDAR-BASED OBJECT
RECOGNITION
We investigated the development of a classification
system for LiDAR sensors in autonomous inspection
robots. For power lines, LiDAR-based recognition
was employed to introduce perception into the
interior plane of the robot, identify elements in the
lower cables, and measure the distance between the
elements and vegetation, as shown in Figure 5.
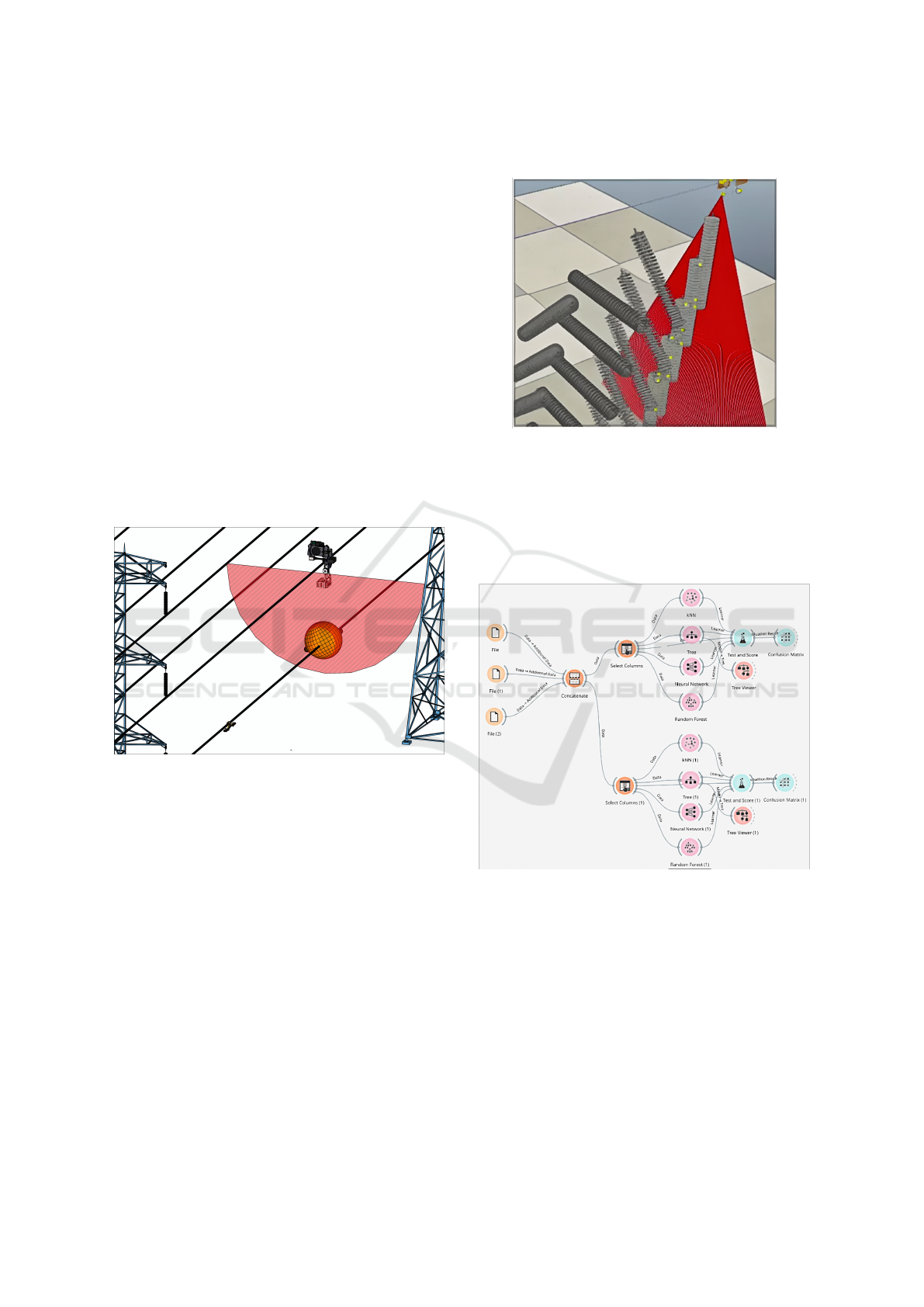
Figure 5: Proposed approach for LiDAR-Based Object
Recognition.
Four machine-learning models were tested
to develop a more reliable method for object
recognition. The analysis was conducted using
Orange (Dem
ˇ
sar et al., 2013; Dem
ˇ
sar and
Zupan, 2012)—an open-source platform for data
visualization and machine learning—and the
virtual experiment platform CoppeliaSim (Coppelia
Robotics) (Rohmer et al., 2013) for simulation of
robotics systems. A Hokuyo LiDAR sensor was
configured to perform 158 readings within a 50° field
of view. The sensor was attached to a simple model
of the inspection robot, and both the sensor and
robot were controlled and configured using a Robot
Operating System (ROS). Three distinct scenes were
created, each containing one of the analyzed objects,
with variations in distance and angle, as shown in
Figure 6. To collect the data, a Python script recorded
the sensor readings as the robot moved through each
scene.
Figure 6: Creation of the dataset in a virtual environment.
Four machine-learning models were tested
to develop a more reliable method for object
recognition. A composite technique was employed
to compare the results of k-nearest neighbors (kNN),
decision tree, random forest, and neural network
models, as shown in Figure 7.
Figure 7: Analysis of Machine Learning methods.
A confusion matrix—a fundamental tool in
machine learning and data analysis—was used to
evaluate the performance of the classification model
by comparing the predictions made by the model
with real data. The comparison between the
machine-learning models was based on the confusion
matrix, as shown in Table 1 for the random forest
model, Table 2 for kNN, Table 3 for the decision tree,
and Table 4 for the neural network.
The random forest model had the highest scores
across all metrics: it had an area under the ROC
curve (AUC) of 0.963, a classification accuracy (CA)
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
200
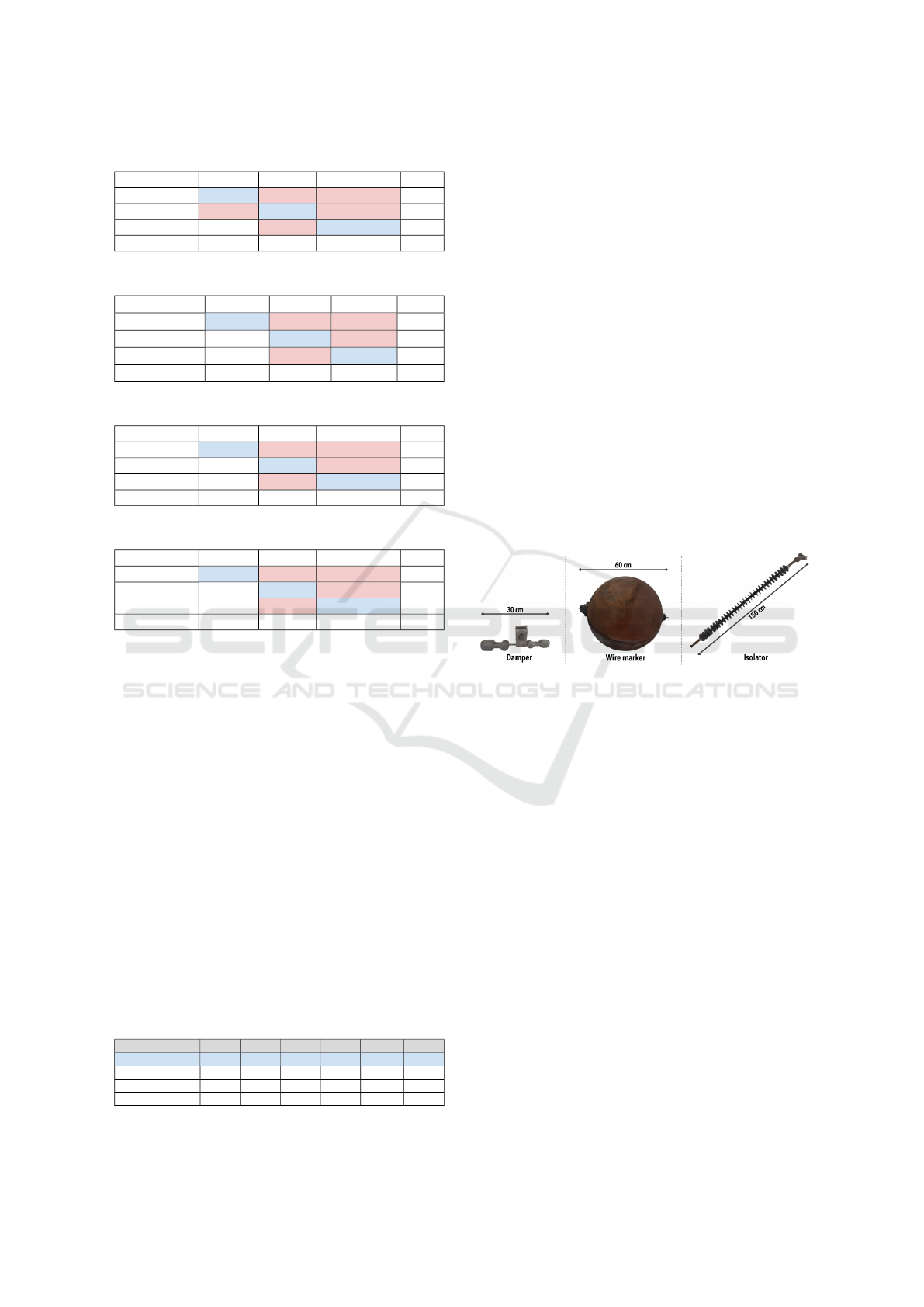
Table 1: Confusion Matrix of Random Forest.
Damper Isolator Wire marker Σ
Damper 334 5 9 348
Isolator 14 868 28 910
Wire marker 11 93 170 274
Σ 359 966 207 1532
Table 2: Confusion Matrix of KNN.
Damper Isolator Signaler Σ
Damper 314 25 9 348
Isolator 8 875 27 910
Wire marker 6 163 105 274
Σ 328 1063 141 1532
Table 3: Confusion Matrix of Decision Tree.
Damper Isolator Wire marker Σ
Damper 317 17 14 348
Isolator 26 793 91 910
Wire marker 10 100 164 274
Σ 355 910 269 1534
Table 4: Confusion Matrix of Neural Network.
Damper Isolator Wire marker Σ
Damper 329 10 9 348
Isolator 12 862 36 910
Wire marker 9 118 147 274
Σ 350 990 192 1532
of 89.6%, an F1 score of 0.891, a precision of
0.892, a recall of 0.896, and a Matthews correlation
coefficient (MCC) of 0.812. This suggests that it
is exceptionally effective for distinguishing between
classes, making accurate predictions, and maintaining
a strong correlation between the observed and
predicted classifications. The neural network model
also performed well, with an AUC of 0.906, CA of
87.3%, F1 score of 0.866, precision of 0.868, recall
of 0.873, and MCC of 0.771, which were close to
those of the random forest model. Both the kNN and
decision tree models exhibited good performance but
lagged behind the top two models. The kNN model
had an AUC of 0.907, CA of 84.5%, F1 score of
0.828, precision of 0.840, recall of 0.845, and MCC
of 0.718. The decision tree model achieved similar
metrics, with an AUC of 0.907, CA of 83.2%, F1
score of 0.831, precision of 0.831, recall of 0.832,
and MCC of 0.701. The evaluation results for these
methods are presented in Table 5.
Table 5: Comparison of machine learning models.
Model AUC CA F1 Prec Recall MCC
kNN 0.907 0.845 0.828 0.840 0.845 0.718
Tree 0.907 0.832 0.831 0.831 0.832 0.701
Neural Network 0.906 0.873 0.866 0.868 0.873 0.771
Random Forest 0.963 0.896 0.891 0.892 0.896 0.812
kNN is a simple and intuitive lazy-learning
algorithm, meaning that it does not require an
explicit training phase, which can be beneficial for
real-time or dynamic datasets where the model must
adapt quickly with extensive retraining. This model
exhibited strong performance, indicating that it is a
reliable and accurate choice for classification tasks.
Furthermore, it has relatively few parameters to tune,
making it simpler to optimize than more complex
models such as neural networks or random forests.
For small to moderately sized datasets, kNN can be
computationally efficient and quick to implement and
is adequate for embedding in hardware; therefore, the
KNN method was selected for object recognition.
The kNN approach was extended for applications
in real LaRa robot. A new dataset was created
using the RPLiDAR A1 LiDAR sensor from Slamtec,
which was configured similarly to the simulation and
pointed perpendicular to the cable, 1.1 m from the
ground. Three types of real objects were analyzed:
insulators, wire markers, and dampers, as shown in
Figure 8.
Figure 8: Objects of power lines: damper, wire marker and
isolator.
The LaRa robot was coupled to a real power-line
cable (i.e., a Grosbeak cable for 380 kV) fixed in a
laboratory structure that provided the same distance
to objects as a real transmission line. Four datasets
were created—one for each class analyzed (nothing,
wire marker, damper, and insulator)—and merged
in Orange. The data captured by the sensor were
processed to reduce noise; the information above 1.1
m was considered noise, as illustrated in Figure 9.
The kNN model was trained using the scikit-learn
library in Python with six neighbors, as determined
by the simulations. The trained model was saved in a
file and converted to .csv for use in C/C++ code. The
Euclidean method was used to calculate the distances
in the kNN model. Each new reading from the LiDAR
sensor was transformed into a vector of 159 elements
and compared with the distances of the kNN model,
and the class with the highest frequency among the
first six distance sums was returned.
The code was implemented on a Raspberry
Pi 3 running Raspbian with ROS Noetic, which
was equipped with a 3.2-inch LCD to show the
classifications. The LiDAR sensor and the code
LiDAR-Based Object Recognition for Robotic Inspection of Power Lines
201
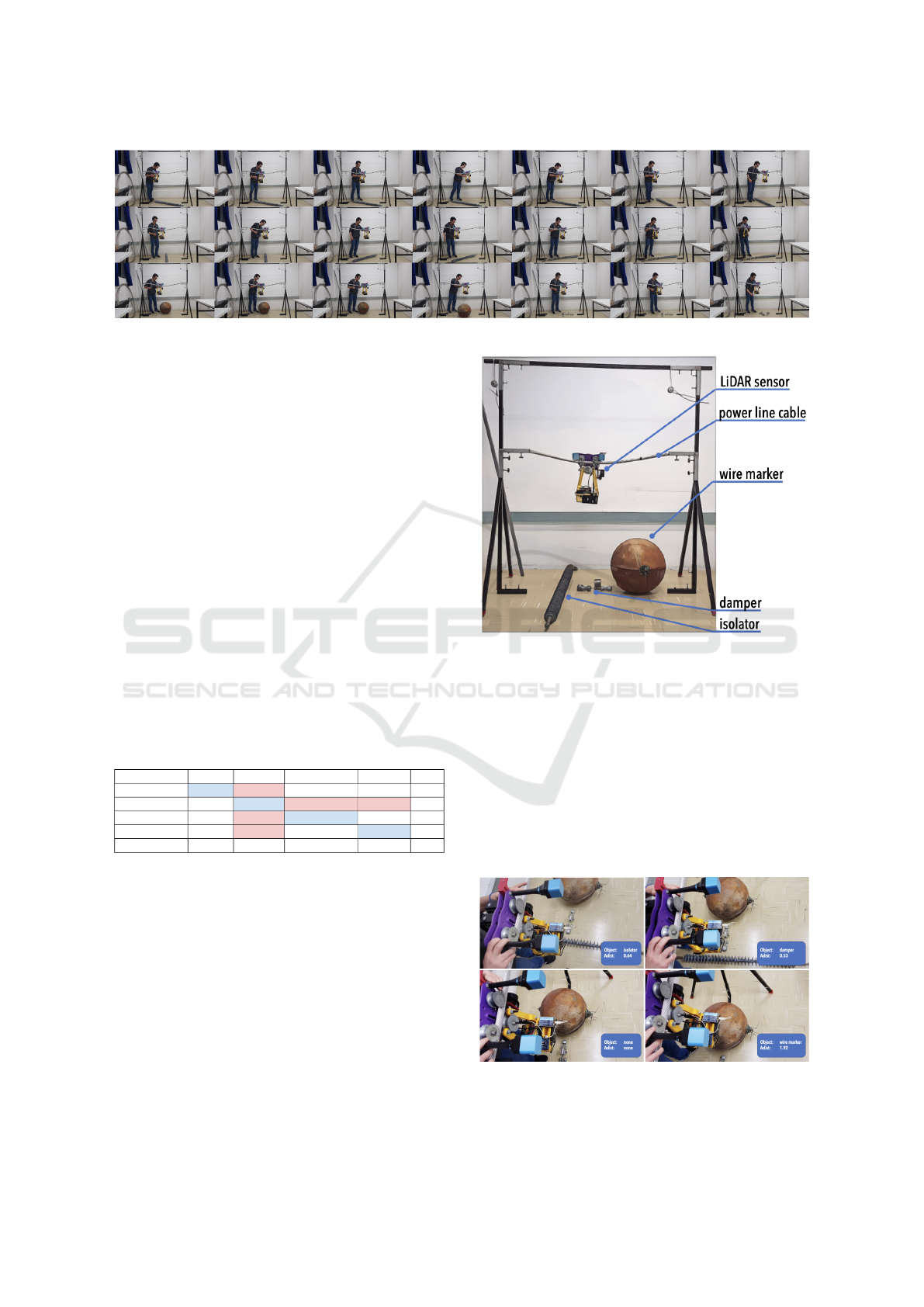
Figure 9: Dataset acquisition.
communicated using the ROS, which facilitated
integration of the system components.
Orange was used to evaluate the accuracy of the
model by employing data collected from an actual
sensor. For this evaluation, the F1 score was selected
because of the imbalance between the classes in
the dataset. The F1 score is a performance metric
that combines precision and recall and provides a
harmonic mean of these two metrics. It is particularly
useful when there is an imbalance in classes because
it offers a more balanced view of the model’s
performance.
For our dataset, when the kNN model was
used with six neighbors, the F1 score was 0.938,
with an accuracy of 94%. Table 6 presents the
confusion matrix, indicating the percentage of correct
classifications for each class. The matrix revealed
that the most significant errors occurred in the
classification of the damper. This is because the
damper was significantly smaller than the other
objects.
Table 6: Confusion Matrix of kNN in real model.
None Isolator Wire marker Damper Σ
None 98.5% 1.7% 0.0% 2.0% 201
Isolator 0.5% 91.7% 1.5% 15.1% 239
Wire marker 1.0% 3.9% 98.5% 0.7% 269
Damper 0.0% 2.6% 0.0% 82.2% 131
Σ 197 230 261 152 840
4.1 Evaluation
The proposed approach was evaluated within an
experimental framework in which the kNN model
embedded in the Raspberry Pi controlling the LaRa
robot was used to detect objects in the lower plane.
A linear movement experiment was performed on
the robot cable in a round-trip path passing through
elements such as dampers, signals, and insulators.
The recognition system obtained 50 classification
samples for each object at different distances as the
robot moved along the cable, as shown in Figure 10.
The proposed method performed classification
Figure 10: Objects of power lines: damper, wire marker and
isolator.
and returned the average of the six closest distances
to each reading. When the sensor-captured data
were consistent with the training data, the average
distance of the readings was below 1, indicating high
classification certainty. This metric was adopted to
analyze whether the model was capable of correctly
identifying objects and maintaining the expected
proximity between the sensor readings and training
data. The evaluation results are shown in Figure 11,
and the output data are presented in Table 7.
Figure 11: Experimentation of LiDAR-Based Object
Recognition.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
202

Table 7: Overall evaluation.
Recognitions Efficiency Mean A.distance Deviance
Damper 46 92.00% 0.44 0.07
Isolator 48 96.00% 0.61 0.14
Wire marker 50 100.00% 1.41 0.34
Mean 48 96.00% 0.82 0.18
The experimental analysis was summarized and
graphically presented using boxplots. These graphs
provide a visual summary that can help identify the
central tendency, variability, and symmetry of the
data, along with potential outliers, as shown in Figure
12.
Figure 12: Boxplot of average distances.
5 CONCLUSIONS
This paper presents a novel approach for detecting
and classifying elements along power lines using a
LiDAR sensor. In contrast to traditional methods that
process entire 3D point clouds, this method focuses
on analyzing a single two-dimensional (2D) slice of
an object, significantly reducing the data volume and
increasing the computational efficiency.
Object classification was achieved by calculating
the absolute differences between consecutive values
within a 2D slice of the LiDAR point cloud.
These differences were aggregated to create a
unique signature for each object, allowing effective
categorization. The results indicated that the kNN
classification system can introduce the capability of
power-line object recognition to a LaRa autonomous
inspection robot equipped with a LiDAR sensor,
achieving accurate identification of different classes
of objects.
ACKNOWLEDGEMENTS
The project is supported by the National Council for
Scientific and Technological Development (CNPq)
(process CNPq 407984/2022-4); the Fund for
Scientific and Technological Development (FNDCT);
the Ministry of Science, Technology and Innovations
(MCTI) of Brazil; the Araucaria Foundation; and the
General Superintendence of Science, Technology and
Higher Education (SETI).
REFERENCES
Alhassan, A. B., Zhang, X., Shen, H., and Xu, H.
(2020). Power transmission line inspection robots:
A review, trends and challenges for future research.
International Journal of Electrical Power & Energy
Systems, 118:105862.
Chen, C., Jin, A., Yang, B., Ma, R., Sun, S., Wang,
Z., Zong, Z., and Zhang, F. (2022). Dcpld-net:
A diffusion coupled convolution neural network for
real-time power transmission lines detection from
uav-borne lidar data. International Journal of Applied
Earth Observation and Geoinformation, 112:102960.
Chen, M., Tian, Y., Xing, S., Li, Z., Li, E., Liang, Z., and
Guo, R. (2021). Environment perception technologies
for power transmission line inspection robots. Journal
of Sensors, 2021(1):5559231.
Dem
ˇ
sar, J., Curk, T., Erjavec, A., Gorup,
ˇ
C., Ho
ˇ
cevar, T.,
Milutinovi
ˇ
c, M., Mo
ˇ
zina, M., Polajnar, M., Toplak,
M., Stari
ˇ
c, A., et al. (2013). Orange: data mining
toolbox in python. the Journal of machine Learning
research, 14(1):2349–2353.
Dem
ˇ
sar, J. and Zupan, B. (2012). Orange: Data mining
fruitful and fun. Inf. Dru
ˇ
zba IS, 6:1–486.
Jenssen, R., Roverso, D., et al. (2018). Automatic
autonomous vision-based power line inspection: A
review of current status and the potential role of deep
learning. International Journal of Electrical Power &
Energy Systems, 99:107–120.
Korki, M., Shankar, N. D., Shah, R. N., Waseem, S. M.,
and Hodges, S. (2019). Automatic fault detection
of power lines using unmanned aerial vehicle (uav).
In 2019 1st International Conference on Unmanned
Vehicle Systems-Oman (UVS), pages 1–6. IEEE.
Paneque, J., Valseca, V., Mart
´
ınez-de Dios, J., and Ollero,
A. (2022). Autonomous reactive lidar-based mapping
for powerline inspection. In 2022 International
Conference on Unmanned Aircraft Systems (ICUAS),
pages 962–971. IEEE.
Qin, X., Wu, G., Lei, J., Fan, F., Ye, X., and Mei, Q.
(2018). A novel method of autonomous inspection for
transmission line based on cable inspection robot lidar
data. Sensors, 18(2):596.
Rohmer, E., Singh, S. P., and Freese, M. (2013). V-rep:
A versatile and scalable robot simulation framework.
In 2013 IEEE/RSJ international conference on
intelligent robots and systems, pages 1321–1326.
IEEE.
Yang, L., Fan, J., Liu, Y., Li, E., Peng, J., and
Liang, Z. (2020). A review on state-of-the-art
power line inspection techniques. IEEE
LiDAR-Based Object Recognition for Robotic Inspection of Power Lines
203

Transactions on Instrumentation and Measurement,
69(12):9350–9365.
Zhang, Y., Dong, L., Luo, J., Lu, L., Jiang, T., Yuan, X.,
Kang, T., and Jiang, L. (2022). Intelligent inspection
method of transmission line multi rotor uav based on
lidar technology. In 2022 8th Annual International
Conference on Network and Information Systems for
Computers (ICNISC), pages 232–236. IEEE.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
204
