
NODE and Contraction Methods for Dynamics Learning from
Human Expert Demonstrations
Tufail Ahmed
1
, Sangmoon Lee
1a
and Ju H. Park
2b
1
Department of Electronics and Electrical Engineering, Kyungpook National University, Daegu, Republic of Korea
2
Department of Electrical Engineering, Yeungnam University, Kyongsan, Republic of Korea
Keywords: Neural Ordinary Differential Equations (NODE), Learning from Demonstrations (LfD), Dynamic Systems,
Imitation Learning, Initial Value Problem, Contraction Theory.
Abstract: In this paper, we propose model-free or learning-from-demonstration methodologies for accurately estimating
the complex and nonlinear behaviors of dynamic systems such as mobile robots, robotic arm manipulators,
and unmanned aerial vehicles (UAVs). Under learning from demonstration (LfD), this study investigates two
different approaches: The first proposed methodology is the contraction theory, in which the assigned task
demonstration is practically performed by the human expert, who tries to learn and imitate it. On the other
hand, the same task learns and imitates by utilizing the neural ordinary differential equations (NODEs) for
dynamic systems. Using the concepts of both approaches, we tried to make it possible for the system to pick
up on and imitate the shown behavior or demonstration accurately. In dynamics learning, the proposed
contraction method utilizes the conceptual framework of the contraction theory, which ensures the motions
of dynamic systems that eventually converge to nominal or desired behavior. At the same time, NODE uses
the neural network with different configurations of hidden layers, learning rate, nonlinear activation function,
and ODE solver. A spiral trajectory is considered a human expert demonstration that is estimated by both
methodologies (i) NODE and (ii) contraction theory. For validation purposes, we compared the results of both
approaches.
1 INTRODUCTION
Learning by demonstration, or LfD for short, is a
useful strategy for rapidly enhancing robotic
efficiency. It enables robots to gain capabilities by
observing what they want to do. Focusing on allowing
the robotic device to program by itself, the human
operator demonstrates an action to the robot by
demonstrating how the operation ought to be
performed. Learning action patterns through as few
demos as possible is vital, and the quantity of storage
required is reduced when taught skills are concisely
represented (Khansari-Zadeh, et. al., 2011; Calinon,
S., et. al., 2007). It is possible to represent actions
from one point to another to ensure all come to an end
at a designated spot in state space (Schaal, S., 1999).
Simplifying more complex tasks can yield
fundamental components of robot automation
surveillance: sequences of one point to motions or
a
https://orcid.org/0000-0001-8252-952X
b
https://orcid.org/0000-0002-0218-2333
modeling between point actions (Kulic, D., et. al.,
2008). When an operator directs an autonomous
device throughout an activity, it automatically sees
the process from its point of view. LfD: While
dynamical actions specify how to emulate, one point
to another action includes steps made by human
experts to solve the problem (Dautenhahn, K., and
Nehaniv, C. L., 2002). Robotic trajectories are shown
via kinesthetic training to circumvent the matching
issue, whereby human observers passively guide the
robot along its ideal motion (B., Akgun, and
Subramanian, K., 2011). One of the earliest instances
of digital summoning taught via examples is
dynamical motion primitive concepts (DMP). DMP is
used to combine a linear dynamical system and a
nonlinear force factor, which is obtained in one demo
(Ijspeert, A., et. al., 2013). Poor replication could
occur from implementing restrictive stabilization
criteria. If one concentrates too heavily on precise
Ahmed, T., Lee, S. and Park, J. H.
NODE and Contraction Methods for Dynamics Learning from Human Expert Demonstrations.
DOI: 10.5220/0012992900003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 205-211
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
205
reproduction, one may become less resilient to
disruptions, which could eventually cause deviation.
There are instances where precision suffers because
reliability is given precedence over efficiency. It
might not be the most effective solution if the intricate
dynamics underneath is fascinating. Finding the right
balance between studying the intricacies of kinetics
and maintaining stabilization in a system that changes
is difficult. Enabling robots and autonomous devices
to perform tasks efficiently within dynamic settings
and learning from demonstrated actions (LfD) is a
critical capability. Highly complex, non-linear
trajectories like spirals are a common challenge for
conventional LfD techniques. To enhance the
prediction and reproduction of these trajectories, this
work explores the application of contraction theory
and neural networks with ordinary differential
equations (neural ODEs). We examine such
approaches' theoretical underpinnings, real-world
applications, and comparative effectiveness.
The paper's remaining structure is as follows. In
the next section, the problem formulation of both
proposed methods (node and contraction theory) is
presented. In Section 3, we present the neural ODE
and contraction theory learning framework for
learning the dynamics of the dynamic systems. In
Section 4, we performed the simulation and
demonstrated the effectiveness of both the proposed
methodologies. Finally, we concluded the paper with
a summary and future research direction.
Table 1: Notations Used in This Paper.
Symbols Meanings
()
x
t
∗
Nominal trajectory
x
•
Rate of change of the state
^
()
f
x
θ
Learn or estimated nonlinear function
^
()
i
x
t
Estimated current state
^
1
()
i
x
t
+
Estimated future state
0
t
initial time
i
t
final time
(()
i
g
xt
Learn nonlinear function in NODE
(,)
true
f
xt
Learn nonlinear function in
contraction
x
δ
virtual displacement in trajectories
max
λ
maximum eigen value of Jacobian
2 PROBLEM FORMULATION
We formulate the robotic system's state-to-state
motions as an autonomous dynamic system with a
nominal unknown trajectory
()
x
t
∗
made up of N
demonstration data points. A system's state can be
regarded as each demonstration data point. When a
trajectory moves with noise or disturbance, the
autonomous dynamic system is
^
()xf x
θ
ε
•
=+
(1)
Where
f
is the learnable nonlinear function, and the
additive term represents the noise in the system. The
system without noise can be represented by the
below-mentioned equation.
^
()
xf
x
θ
•
=
(2)
We considered the single spiral trajectory as the
demonstration of the expert and try to estimate it
accurately using the neural ode and contraction
method. In this work, we use supervised learning
method for the given demonstration data, N. The
objective is to learn the nonlinear spiral function
accurately with the minimum loss value and try to
estimate the desired trajectory. The prediction of the
nonlinear function can be achieved by using the
below mentioned NODE equation.
^^
100
() () ( (),,),(),,),
ii i
x
txtNODEfxttxttt
θ
θ
+
=+
(3)
The objective is to minimize the difference
between the desired trajectory and the learned
nonlinear trajectory to find the optimal parameter
values which reduce the loss, we considered the
following loss minimization for the NODE.
2
11
2
1
min ( ) ( ( ))
NT
ii i
ii
xt gxt
NT
θ
==
−
(4)
Above mentioned equation expresses the loss
function. The parameters
θ
, and values continuously
update until the loss values reach the least minimum,
or in other words the difference between the predicted
and observed state becomes negligible.
2.1 Forward Propagation
00
( ) ( ( ( ), , ), ( ), , ),
kk
x
t ODESolve f x t t x t t t
θ
=
(5)
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
206
2.2 Back-Propagation
0
0
0
() ((),,) ()
((),, )
(,,,),
() ()
((),, )
0
k
k
k
xt f xt t xt
LfxttL
ODESolve t t
xt x xt
fxt t
L
θ
θ
θ
θ
θ
θ
∂∂∂
=
∂∂∂
∂
∂
∂
∂
(6)
The implementation of the NODE architecture can be
considered with a basic neural network that is fully
connected and possesses one hidden layer.
21 12
()
(.(.() ) ),
dx t
WWxtb b
dt
σσ
=++
(7)
where,
()xt
, is the particular system state,
1
W
and
2
W
are the matrix of weights,
1
b
and
2
b
are the bias
vectors, and
σ
, is the nonlinear activation function.
The numerical technique Runge-Kutta is used to
solve the ODE to determine the system's state at any
given moment. we can reconfigure the NODE
network architecture by modifying the hidden layers
and learning rate of the neural network
1
1
21
32
43
11234
(( ), )
(( ) , )
22
(( ) , )
22
(( ) , )
()() ( 2 2 )
6
kk
kk
kk
kk
kk
kk
tth
sfxtt
hh
sfxt st
hh
sfxt st
sfxt hsth
h
xt xt s s s s
+
+
=+
=
=++
=++
=++
=++++
(8)
In the contraction theory for the learned models. The
problem of system identification can be represented as
(,)
(,) (,) ( (,) (,)),
true
true L true L
xf xt
x f xt f xt f xt f xt
•
•
=
==+ −
(9)
The true function is unknown, approximated by
the contracting learning model.
3 MAIN RESULTS
Dynamic systems are mathematical methods that
depict or learn the evolution of a system's dynamics
across time and are capable of understanding complex
systems behaviours. The equation of an autonomous
dynamic system is:
()
( ( ), ),
dx t
fxt t
dt
=
(10)
where, ∈
are the system state,
,tT∈
is
time interval T, and :
→
a vector field of
nonlinear function which defines the dynamics of the
system and which needs to be learned. If we look
around mobile robots, robotic arm manipulator,
UAVs, and many other industrial systems possess the
dynamic behaviours which are nonlinear, complex
and hard to learn. To tackle the nonlinear and
complex behaviours of such systems we considered
spiral trajectory for our work as the nonlinear and
complex dynamic system which can be express in
mathematical form mention below.
cos( )
sin( )
x r
y r
θ
θ
=
=
(11)
We learned the considered nonlinear spiral
trajectory with the proposed method of Neural
ordinary differential equations (NODE) which is
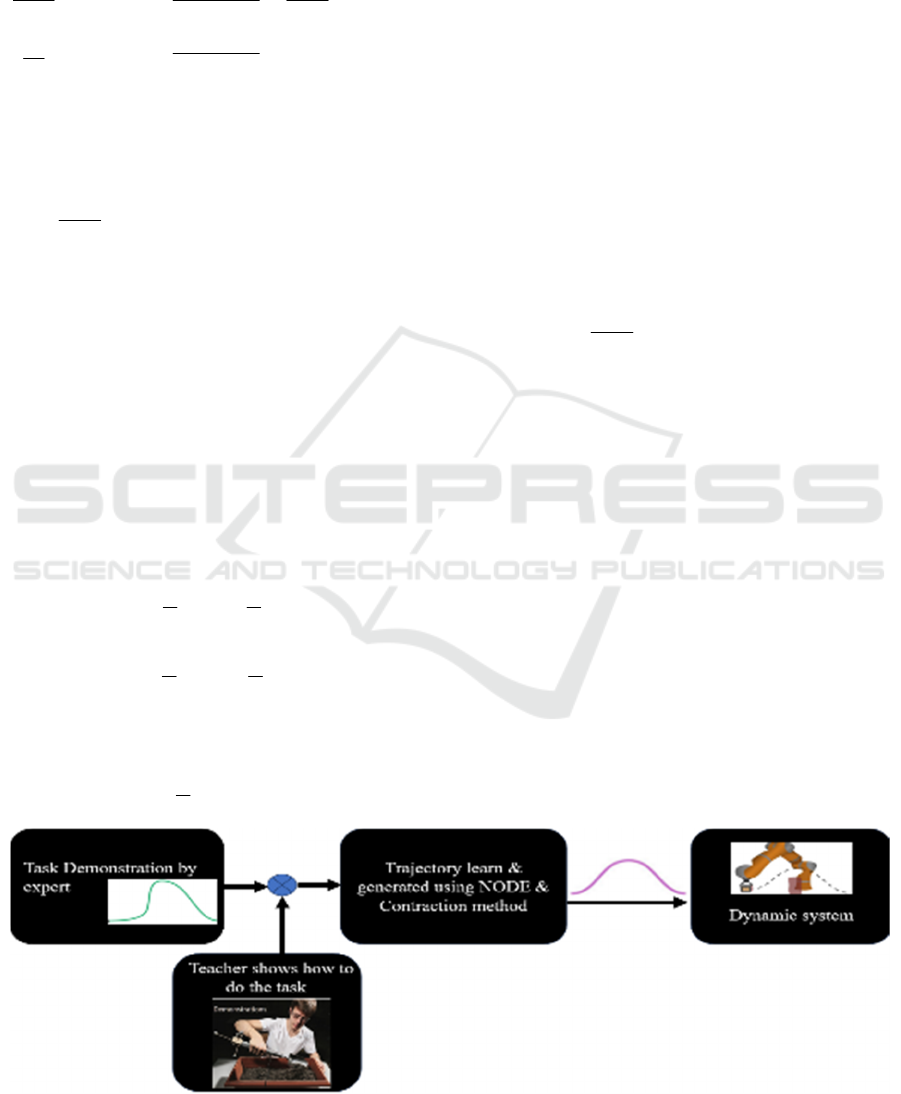
Figure 1: Overall view of proposed system.
NODE and Contraction Methods for Dynamics Learning from Human Expert Demonstrations
207
efficient in depicting time series data and dynamical
systems. To estimate “
f
”, the NODEs employ
neural networks described in equation.
0
((), )
dx
xfxt t
dt
θ
•
==
(12)
The above-mentioned equation represents the
mathematical form of the neural ode. The initial state
of learnable nonlinear dynamic system “
f
θ
”, is given
by the
0
()
x
t
. The nonlinear spiral function states
estimations acquired by the help of the neural
network, which optimized the learned parameters
θ
for all given states. The optimized parameter reduced
the loss values between the encoded hidden states and
the predicted
2
() (()
T
ii
i
Lxgxt
θ
=−
(13)
In forward propagation it solves the ode and in
backward propagation it will compute the gradient
which updates the weights of neural network to
obtained the optimal values of learnable parameters.
The neural ode architecture implementation can be
represent as
2112
()
(. (.() ) ),
dx t
relu W relu W x t b b
dt
=++
(14)
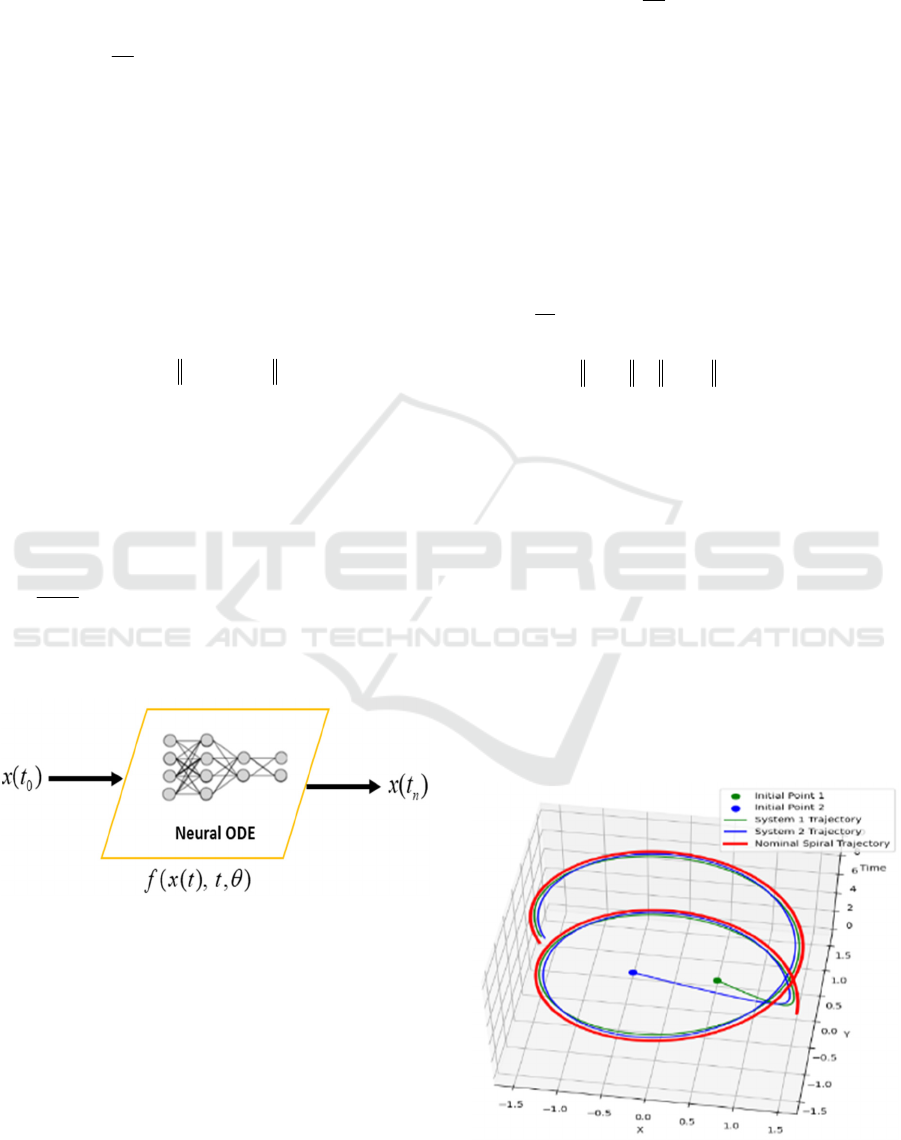
The visualization of the proposed NODE
framework is given below
Figure 2: NODE framework.
The other proposed method based on contraction
theory use to find the differential dynamics of the
spiral nonlinear and complex systems by considering
the contraction metric with uniform positive definite
matrix. It provides the incremental exponential
stability for the different trajectories started from the
different points. The mathematical expression is
express as
(,)xfxt
•
=
(15)
can be rewrite in the differential form
(,)
f
xxtx
x
δδ
•
∂
=
∂
(16)
Where,
x
δ
is the virtual displacement between
two neighbouring trajectories as the virtual
displacement decreases between two trajectories and
desired trajectory if they become one single trajectory
we can say that the system accurately estimated the
demonstrated trajectory and system exponentially
converge to the stability. If there exist a uniformly
positive definite metric M(x), and satisfy the
following conditions, we can say system is
contractive.
max
()
TT
d
xM x xM x
dt
δδ λδδ
≤−
(17)
() (0)
t
x
txe
λ
δδ
−
≤
(18)
4 SIMULATION RESULTS
In this section, we discussed the performed
simulation and results obtained by using the both
methodologies of NODE and contraction.
4.1 Contraction Method
The results in Figure 3 show the difference between
the true or nominal trajectory and learned trajectories
which started from two different initial points and
tried to converge to the desired trajectory but due to
less stronger contraction term, the learned could not
reach the ideal trajectory accurately.
Figure 3: Less contraction system.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
208
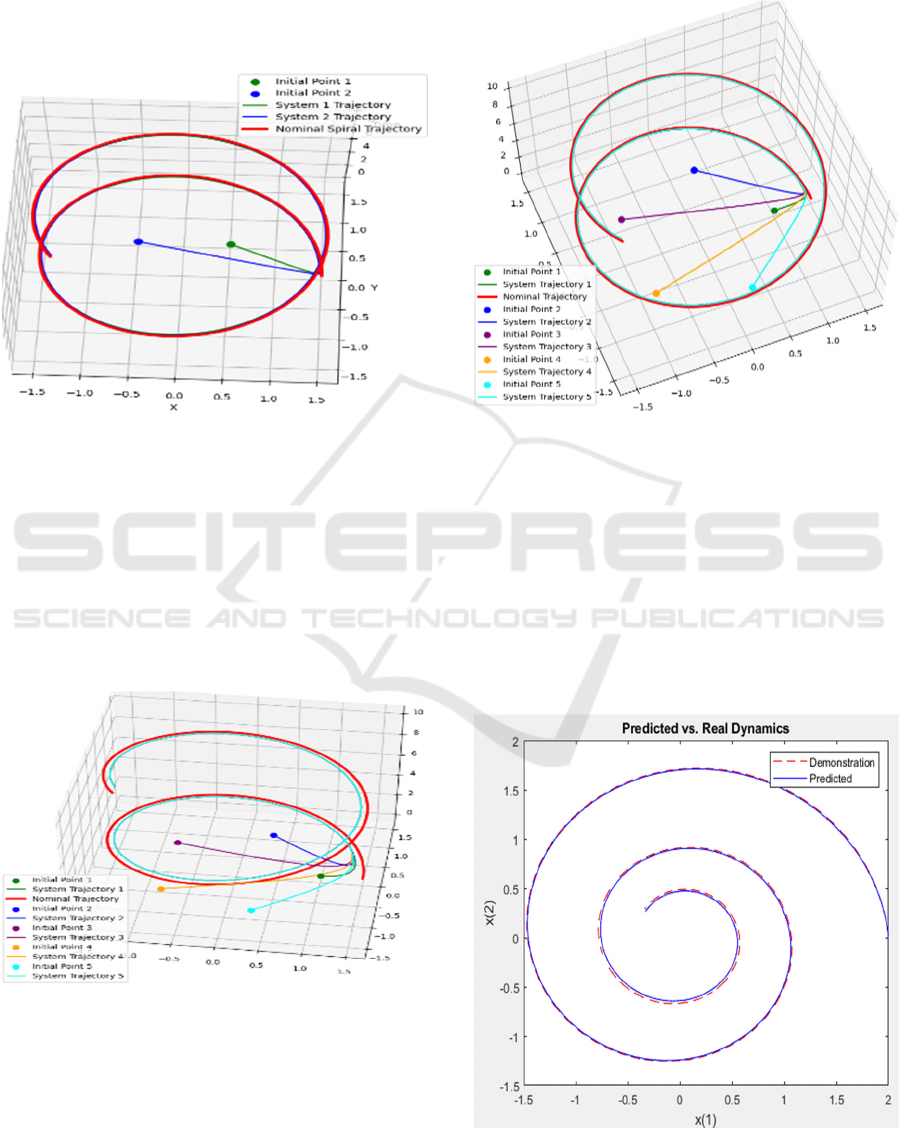
In Figure 4 we can see the learned trajectory
approximate the true trajectory quite accurately and
the difference between the true and learned
trajectories are negligible and show the strong
contractive behaviour with the strong contractive
term considered during the learning.
Figure 4: Strong contraction system.
In Figure 5 we considered the five different
Trajectories which started from the different initial
points, in the first case we considered the minimal
contractive term and analysed whether the learned
trajectories reached the target trajectory accurately
but unfortunately, could not make it and showed the
huge difference between the learned and true
trajectories this is because the less strong contraction
term used during the learning.
Figure 5: Less contraction system.
In the above Figure 6 five different trajectories
started from the five different initial points, the results
show that all five trajectories converge into one single
trajectory as time goes on which proves the system is
highly contractive and stable. The difference between
the true and learned trajectories minimize this
happened due to strong contraction term considered
during the learning.
Figure 6: Strong contraction system.
4.2 Neural Ode’s
In the Figure 7 the Spiral trajectory is given as the
demonstration of the neural ordinary differential
network. The red dot line is the spiral demonstration
and a blue solid line in the estimation of the observed
values. we can see from the results the NODE based
architecture provide the accurate estimation but when
the initial value changes its performance, degrade due
to initial value problem.
Figure 7: NODE based dynamics learning.
NODE and Contraction Methods for Dynamics Learning from Human Expert Demonstrations
209
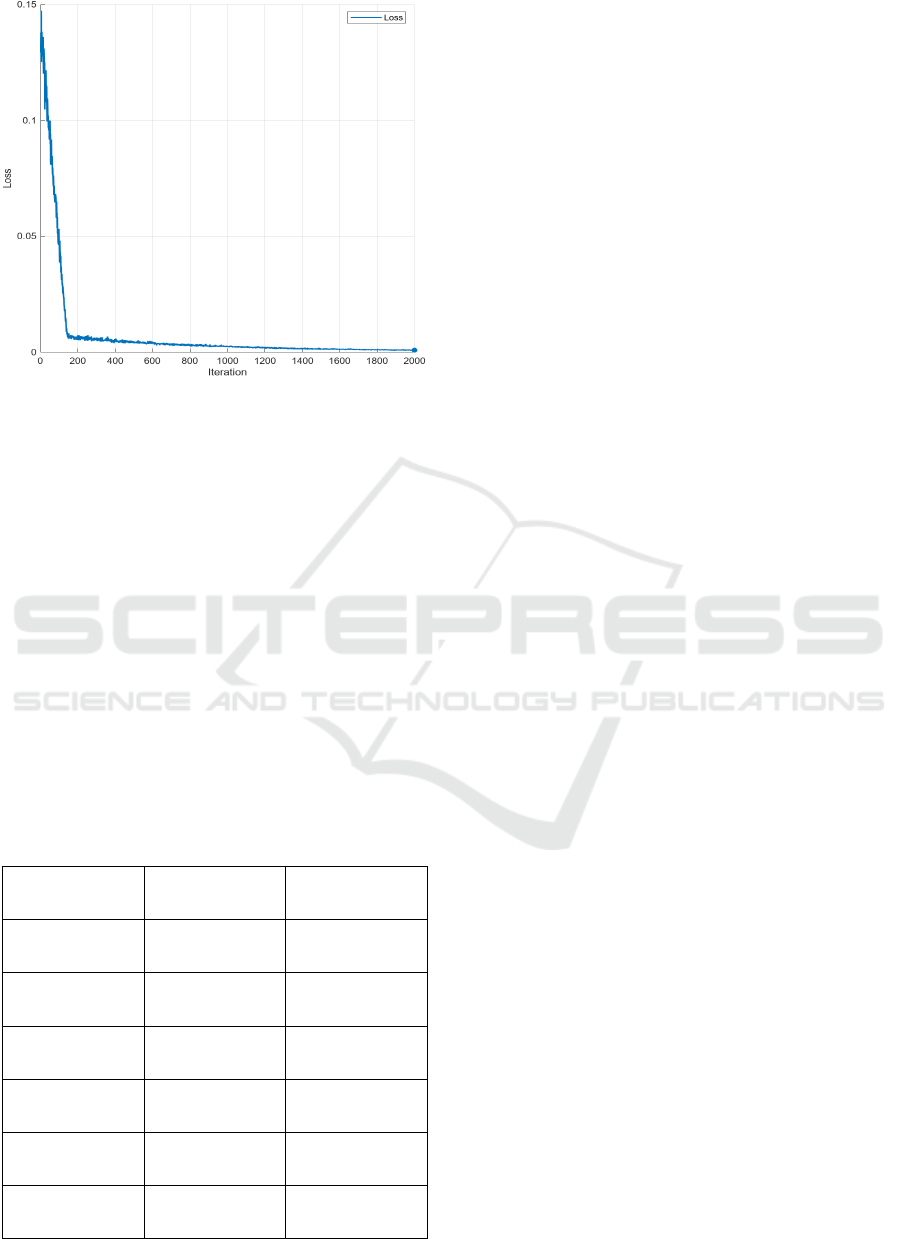
Figure 8: Learning Loss.
Figure 8 shows the learning of the NODE
framework over the iteration of 2000.
5 DISCUSSIONS
In this work, a comparative analysis conducted of two
different methods for the task of desired trajectories
estimation of dynamic systems given by the
demonstrations. Simulation performed on the spiral
trajectory of dynamic systems and evaluated based on
the performance metrics mentioned below in table 2.
The NODE method shows better accuracy for
trajectory estimation, in an unperturbed environment
but faces stability issues in a perturbed environment.
Table 2: Performance metric of NODE and contraction
methods.
Metric Neural ODE
Contraction
method
Accuracy More accurate Accurate
Robustness Moderate High
Convergence
Rate
Fast Faster
Computational
Efficiency
Efficient but
expensive
Efficient
Stability
Sensitive to
perturbation
Robust against
perturbation
Real Time
Application
Good after
training
Excellent
On the other hand, contraction method is less
accurate within an acceptable margin of accuracy but
robust and stable in trajectory estimation both in
perturbed and unperturbed conditions. Furthermore,
the contraction method can provide fast exponential
convergence as compared to NODE even in the
external disturbance. Contraction method is more
efficient both in computational efficiency and real-
time application implementations. These findings
show that both methods supersede each other in
different performance metrics. The selection of these
methods highly based on the type of applications.
6 CONCLUSIONS
The presented work tried to cover the dynamic
learning of dynamic systems by incorporating the
learning from the demonstration method. We
considered the spiral trajectory as the expert
demonstration data for any particular actions of the
dynamic system and used two different
methodologies NODE and Contraction theory to
learned these demonstration actions, NODE based
learning provides better accuracy and flexibility but
on the other hand, it is sensitive to the initial value
and demand long training time, require high
computational cost and lack of robustness under the
perturbed conditions for higher dimensional systems.
While the contraction theory provides the higher
stability, robust to the perturbation, produce good
response on the initial value problem,
computationally efficient. These two methods show
the trade-off between robustness and flexibility,
selection of these methodologies based on the
demand of the applications. In the future, the
proposed work will extent for the practical
implementation on robotic arm manipulator or mobile
robot dynamic systems with the insertion of obstacles
and perturbation. In this work correction term or
control term was not considered for the unseen data
and spurious attractor problems in future we
considered solving such problems with the
implementation of an appropriate control method,
stability is also not considered we plan to incorporate
the stability and safety constraints in the future work.
Furthermore, we planned to expand the proposed
work by considering the higher-dimension problem.
ACKNOWLEDGEMENTS
This work was supported in part by the National
Research Foundation of Korea (NRF) through
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
210

the Korea government, Ministry of Science and
ICT under the grant, RS-2024-00350118,
2019R1A5A8080290 and supported by Institute of
Information and Communication Technology
Planning & Evaluation (IITP) grant funded by the
Korea government (MSIT) (IITP-2024-RS-2022-
00156389).
REFERENCES
Khansari-Zadeh, S. M., and Billard, A. (2011). Learning
stable nonlinear dynamical systems with gaussian
mixture models. In IEEE Transactions on Robotics,
27(5):943–957.
Calinon, S., Guenter, F., and Billard, A. (2007). On
learning, representing and generalizing a task in a
humanoid robot. Transactions on Systems, Man, and
Cybernetics, 37(2):286–298.
Schaal, S. (1999). Is imitation learning the route to
humanoid robots? Trends in Cognitive Sciences, 3(6):
233 242.
Kulic, D., Takano, W., and Nakamura, Y. (2008).
Incremental learning, clustering and hierarchy
formation of whole-body motion patterns using
adaptive hidden Markov chains. The Int. Journal of
Robotics Research, 27(7): 761–784.
Dautenhahn, K., and Nehaniv, C. L. (2002). The agent-
based perspective on imitation. Cambridge, MA, USA:
MIT Press, pp. 1–40.
B., Akgun, and Subramanian, K. (2011). Robot learning
from demonstration: Kinaesthetic teaching vs.
teleoperation.
Ijspeert, A., Nakanishi, J., Pastor, P., Hoffmann, H., and
Schaal, S. (2013). Dynamical Movement Primitives:
learning attractor models for motor behaviours, Neural
Computation, 25(2):328–373.
NODE and Contraction Methods for Dynamics Learning from Human Expert Demonstrations
211
