
Precision Aquaculture: An Integrated Computer Vision and IoT
Approach for Optimized Tilapia Feeding
Rania Hossam
2
, Ahmed Heakl
1 a
and Walid Gomaa
1,3
1
Department of Computer Science and Engineering, Egypt-Japan University of Science and Technology, Alexandria, Egypt
2
Computer Science Faculty, Mansoura University, Mansoura, Egypt
3
Faculty of Engineering, Alexandria University, Alexandria, Egypt
Keywords:
Computer Vision, Internet of Things (IoT), Aquaculture, Keypoint detection, Object Detection.
Abstract:
Traditional fish farming practices often lead to inefficient feeding, resulting in environmental issues and re-
duced productivity. We developed an innovative system combining computer vision and IoT technologies
for precise Tilapia feeding. Our solution uses real-time IoT sensors to monitor water quality parameters
and computer vision algorithms to analyze fish size and count, determining optimal feed amounts. A mo-
bile app enables remote monitoring and control. We utilized YOLOv8 for keypoint detection to measure
Tilapia weight from length, achieving 94% precision on 3,500 annotated images. Pixel-based measure-
ments were converted to centimeters using depth estimation for accurate feeding calculations. Our method,
with data collection mirroring inference conditions, significantly improved results. Preliminary estimates
suggest this approach could increase production up to 58 times compared to traditional farms. Our mod-
els, code, and dataset are open-source: Models - huggingface.co/Raniahossam33/fish-feeding, Datasets -
huggingface.co/datasets/Raniahossam33/fish feeding, Code - https://github.com/ahmedheakl/fish-counting.
1 INTRODUCTION
Optimizing the fish feeding process is critical, as it ac-
counts for up to 40% of total production costs (Atoum
et al., 2014; Arditya et al., 2021; Oostlander et al.,
2020). Effective nutrient control enhances profitabil-
ity in aquaculture by preventing waste and maintain-
ing high fish quality. Nutrient wastage not only es-
calates costs but also contributes to water pollution,
adversely affecting fish survival and fertility rates.
Therefore, precise nutrient management is essential
for both economic efficiency and sustainable aquacul-
ture development, ensuring optimal water quality and
operational success.
Recent research has proposed various techniques
for controlling the amount of nutrients given to fish.
Some researchers have utilized Convolutional Neural
Networks (CNNs) for predicting morphological char-
acteristics such as overall length and body size by de-
tecting keypoints on the fish body (Su and Khosh-
goftaar, 2009; Tseng et al., 2020). For instance,
(Tseng et al., 2020) proposed a CNN classifier to de-
tect only two keypoints, the fish head, and tail fork
a
https://orcid.org/0009-0009-8712-1457
regions, to measure the fish body length. Alterna-
tively, (Su and Khoshgoftaar, 2009) used a combi-
nation of a faster R-CNN (Ren et al., 2015) for ini-
tial fish detection and a stacked hourglass (Newell
et al., 2016) for keypoint detection, resulting in a
complex and computationally expensive method. An-
other study (Li et al., 2021) proposed a CNN for ma-
rine animal segmentation, which performed well but
involved 207.5 million trainable parameters, making
it unsuitable for resource-constrained environments
like embedded systems or mobile devices.
Automatic control of fish feeding in real environ-
ments remains challenging due to variable data ap-
pearance and weather conditions, which can affect the
accuracy of detection and tracking results (Soetedjo
and Somawirata, 2019; Vaquero et al., 2021; Babaee
et al., 2019). Object tracking, an active research area
in computer vision applications, faces increased com-
plexity in multiple-object tracking due to the need
for accurate association of objects across frames (Va-
quero et al., 2021; Tang et al., 2017; Zhang et al.,
2020b). Recent advancements like the SiamRPN
tracker (Zhu et al., 2018; Li et al., 2019) and multi-
aspect-ratio anchors have significantly improved the
performance of Siamese-network-based trackers by
668
Hossam, R., Heakl, A. and Gomaa, W.
Precision Aquaculture: An Integrated Computer Vision and IoT Approach for Optimized Tilapia Feeding.
DOI: 10.5220/0012995100003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 668-675
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

addressing the bounding box estimation problem.
To address these challenges, our approach in-
volves the following contributions:
• We develop a method to estimate the weight of
Tilapia fish using a length-weight relationship
• We curate an open-source dataset of Tilapia fish
images, annotated with keypoints such as the
mouth, peduncle, belly, and back.
• We train a YOLOv8 model on this dataset, achiev-
ing high precision and recall in keypoint detection
and fish counting.
• We design an end-to-end system, powered by two
cameras installed in the fish tank, to monitor feed-
ing amounts, pH levels, and dissolved oxygen.
The collected data is relayed to a mobile appli-
cation for easy access and real-time monitoring.
This approach provides a holistic solution for effi-
cient and effective aquaculture management.
The remainder of the paper is organized as fol-
lows. Section 2 reviews existing fish mass estimation
techniques and feeding methods. Section 3 details
our approach, including data collection, model train-
ing, and fish weight estimation. Section 4 describes
our IoT system architecture for real-time monitoring
and control. Results and comparative analysis are pre-
sented in Section 5, followed by a discussion of lim-
itations and future work in Section 6. Finally, Sec-
tion 7 summarizes our findings and their implications
for aquaculture productivity.
2 RELATED WORK
This section provides an overview of existing re-
search relevant to our study on precise fish feeding
in aquaculture. We focus on two key areas: fish mass
and length estimation techniques, and automated fish
feeding methods. By examining current approaches,
we aim to contextualize our work within the field and
highlight the advancements offered by our proposed
system.
2.1 Fish Mass and Length Estimation
Techniques
The authors in (Zhang et al., 2020a) developed a fish
mass estimation approach by constructing an exper-
imental data collection platform to capture fish im-
ages. They used the GrabCut algorithm (Rother et al.,
2004) for image segmentation, followed by image en-
hancement and binarization to extract fish body con-
tours. Shape features were extracted and redundant
features were removed using Principal Component
Analysis (PCA) (Ma
´
ckiewicz and Ratajczak, 1993),
with feature values calculated through a CF-based
(Collaborative Filtering) method (Su and Khoshgof-
taar, 2009). A BPNN algorithm was then employed
to construct the fish mass estimation model. In con-
trast, our study uses the YOLOv8 model for key-
point detection to identify critical points such as the
fish’s head and tail. Our dataset is collected using
dual-synchronous orthogonal network cameras, with
frames analyzed by our backend server. Instead of
traditional feature extraction and PCA, we integrate
depth estimation using the GLPN (Kim et al., 2022)
model to create depth maps, enhancing length mea-
surement accuracy by converting pixel coordinates to
real-world dimensions.
The authors in (Jisr et al., 2018; Mathiassen et al.,
2011; Islamadina et al., 2018) have used computer
vision like saliency map, edge detection and thresh-
olding and traditional image processing techniques
like noise reduction and contrast enhancement to seg-
ment (Jisr et al., 2018; Islamadina et al., 2018), or
make a 3D model (Mathiassen et al., 2011) of the fish
body; then use classical machine learning methods,
e.g. regression (Sanchez-Torres et al., 2018; Mathi-
assen et al., 2011) for weight and length extraction.
Although these studies have achieved significant re-
sults, they have involved complex image processing
and feature engineering processes to suit their experi-
mental conditions.
The authors in (Saleh et al., 2023) applied a
novel end-to-end keypoint estimation model called
MFLD-net. It builds upon CNNs (Sandler et al.,
2019), vision transformers (Dosovitskiy et al., 2020),
and multi-layer perceptrons (MLP-Mixer) (Tolstikhin
et al., 2021). Additionally, it leverages patch embed-
ding (Dosovitskiy et al., 2020), and spatial/channel
locations mixing (Tolstikhin et al., 2021). It differs
significantly from our approach as the images were
taken outside the pool environment. Additionally,
their method involved annotating more than four key-
points on each fish, which may increase the complex-
ity of the annotation process. Furthermore, their study
used fish of a fixed size, which limits the model’s abil-
ity to generalize to different fish sizes.
2.2 Fish Feeding Techniques
The authors in (Riyandani et al., 2023) focus
on developing an automatic feeder employing the
YOLOv5x detection model (Vasanthi and Mohan,
2024) for fish feed detection. Their model achieved
notable metrics, including an accuracy of 82% and
mAP of 81.9%. The automatic feeder dispenses a
Precision Aquaculture: An Integrated Computer Vision and IoT Approach for Optimized Tilapia Feeding
669
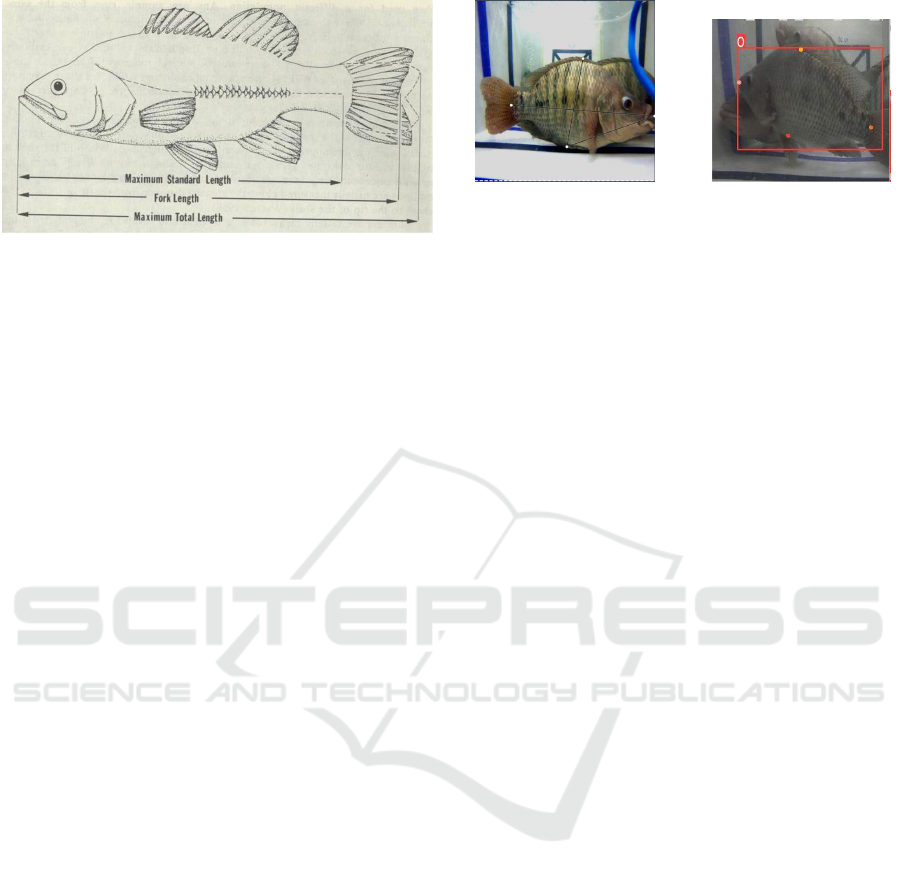
Figure 1: Description of fish lengths. We opt to measure the
maximum standard length to calculate fish weight (Froese
et al., 2014).
fixed amount of 30 grams of fish feed every five rota-
tions of the stepper motor, with observed variations in
fish feed consumption patterns throughout the day. In
contrast, our research advances this field by utilizing
the more advanced YOLOv8 model for keypoint de-
tection, which promises improved performance. This
allows us to adjust the feeding amount dynamically
based on real-time measurements of each fish’s size,
optimizing feeding practices and preventing overfeed-
ing. Our approach integrates depth estimation to
convert 2D image measurements into real-world di-
mensions, enhancing the accuracy of fish length and
weight estimation, and consequently, the daily feed-
ing allowance. This provides a more precise, scalable,
and tailored feeding mechanism than the fixed feeding
amount used in their study.
The authors in (Tengtrairat et al., 2022) employ a
Mask R-CNN (He et al., 2017) with transfer learn-
ing to detect Tilapia fish in images. The detec-
tion model identifies the fish and extracts dimen-
sions such as length and width. The subsequent
weight estimation relies on regression learning mod-
els utilizing three key features: fish length, width,
and depth. The researchers investigated a regression
method for weight estimation like support vector re-
gression (Awad et al., 2015). However, the method-
ology has several cons. Despite its accuracy, the use
of Mask R-CNN is computationally intensive and re-
quires significant processing power. The multi-step
process involving depth estimation and feature extrac-
tion increases complexity and can be error-prone. Ad-
ditionally, the regression models, while effective, re-
quire precise input features and may not generalize
well across varying conditions.
3 METHODS
This section details our approach to developing a pre-
cise fish-feeding system. We describe the process of
(a) Keypoint annotation. (b) Detection example.
Figure 2: Examples for annotation for fish counting.
estimating Tilapia fish weight, our data collection and
annotation methods, the implementation of YOLOv8
for keypoint detection and fish counting, and our tech-
nique for calculating fish length and feed amounts.
These methods form the foundation of our integrated
computer vision and IoT-based solution for optimiz-
ing aquaculture management.
3.1 Tilapia Fish Weight Estimation
To determine the appropriate amount of Tilapia fish
feed, (Jisr et al., 2018; Lupatsch, 2022) have shown
that the amount of feed required for fish can be esti-
mated based on their weight. (M Osman et al., 2020)
provided an equation 1 to estimate the fish weight
from its length, where the length is defined as the
distance from the mouth to the peduncle (Jerry and
Cairns, 1998) as shown in figure 1 (Maximum Stan-
dard Length):
W = aL
b
(1)
where W is the fish’s weight in grams (g), L is the
length (cm), and a and b are species-specific coeffi-
cients (a = 0.014 and b = 3.02 for Tilapia) (M Os-
man et al., 2020). This method simplifies data col-
lection, bypassing direct weight measurements, and
allows weight distribution analysis and other parame-
ters within the fish population.
3.2 Keypoint Annotation and Data
Collection
To determine the appropriate feed amount for Tilapia
fish, we first needed to specify keypoints to measure
their length accurately, defined as the distance from
the mouth to the peduncle (Author and Author, Year).
For this purpose, we collected 3,500 images of Tilapia
fish in a small bowl of three fish. These images
were manually annotated using Roboflow (Roboflow,
2022), a widely used tool for creating and manag-
ing annotated datasets. Although we only needed
the mouth and peduncle keypoints, we annotated four
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
670

keypoints on each fish—mouth, peduncle, belly, and
back—to aid future research using girth to determine
weight (see figure 2a). Following the annotation pro-
cess, we trained YOLOv8 model (Reis et al., 2023)
on the respective dataset to predict the keypoints ac-
curately.
3.3 Calculating Fish Length
To estimate fish length, we calculate the Euclidean
distance between the head and tail keypoints in pixel
units. This measurement is converted to centimeters
by integrating depth estimation and focal length, con-
sidering the camera distance. Initially, each fish im-
age is resized to a standard (416 × 416) for consis-
tency.
Table 1: Daily feeding allowances as a percentage of fish
weight (Riche and Garling, 2003).
Fish Weight Range (g) Daily Feeding Range (%)
0–1 10 to 30
1–5 6 to 10
5–20 4 to 6
20–100 3 to 4
Larger than 100 1.5 to 3
The GLPN (Global-Local Path Networks)
model (Kim et al., 2022) is employed for depth
estimation, predicting a depth value for each pixel
and creating a depth map essential for spatial infor-
mation. The YOLOv8 model detects keypoints on
the fish (head and tail). These coordinates are then
adjusted by their respective depth values to approx-
imate real-world distances. In this depth-adjusted
coordinate space, the Euclidean distance between the
head and tail keypoints represents the fish’s length in
pixel units. For the conversion of pixel coordinates
to real-world coordinates, given a point in the image
with coordinates (x
p
, y
p
) and depth d, the real-world
coordinates (X, Y, Z) can be computed as follows:
Let f be the focal length of the camera (in pixels).
Then, we can calculate the 3D coordinates (X, Y, Z)
from the 2D image coordinates (x
p
, y
p
) and depth d
as follows:
X =
x
p
· d
f
, Y =
y
p
· d
f
, Z = d (2)
We can retrieve the length by getting the Eu-
clidean distance between (X , Y, Z)
head
and (X, Y, Z)
tail
which we call distance. Finally, the fish length is cal-
culated using the formula:
fish length =
f
distance
(3)
3.4 Calculating Fish Count
After estimating the fish feed amount based on
weight, our next goal is to determine the total feed
required for the fish in the bowl. To achieve this, we
trained another YOLOv8 model (Reis et al., 2023) on
our dataset to count the fish accurately as shown in
figure 2b.
3.5 Feed Estimation
Once the optimal fish feeding allowances are deter-
mined from table 1, we estimate the final feed re-
quirements. By leveraging the robustness of the fish
counting models in table 2, the final feed estimation
is calculated by multiplying the number of fish, as de-
termined by the fish counting model, with the average
feeding amount.
4 IoT SYSTEM
Our IoT system integrates a diverse set of sensors in-
cluding pH, dissolved oxygen (DO), and temperature
sensors, along with two cameras, an STM32F103C8
MicroController Unit (MCU) (STMicroelectronics,
2024), and dual pumps—one for feeding fish and an-
other for pH control, as depicted in figure 3. These
sensors are connected to the MCU and continuously
collect crucial data from the aquatic environment. A
prototype is shown in figure 4.
The sensor readings are initially processed by the
MCU. Once processed, the MCU transmits the data
to gateways within the system architecture. From the
gateways, the data is then forwarded via the MQTT
communication protocol (Router, 2024) to our back-
end server. The backend server then acts as the central
hub where the data is stored and processed.
The backend server interacts with a dedicated mo-
bile application, shown in figure 6, serving as the user
interface. Through this application, users can view
real-time graphs, detailed analytics, statistical sum-
maries, and logs reflecting the system’s operations
and environmental conditions. Simultaneously with
sensor data collection, our dual-synchronous orthogo-
nal network cameras actively capture frames from the
pool. These frames undergo processing via the MCU,
followed by transmission to the gateway, and on-
ward to the MQTT broker before reaching the back-
end server. At the backend, AI models analyze these
frames from two cameras to extract keypoints and fish
counts. The results from each camera data and aver-
aged for more accurate predictions.
The AI model’s predictions are then relayed back
Precision Aquaculture: An Integrated Computer Vision and IoT Approach for Optimized Tilapia Feeding
671

Figure 3: Our IoT system architecture and flow for automated aquarium monitoring and feeding.
Figure 4: Interior view of the prototype fish feeding system,
showing electrical wiring, sensors, and mechanical compo-
nents housed within a wooden enclosure.
to the backend server, which communicates them
via the MQTT broker to the MCU. Based on these
insights, the MCU precisely transmits the feeding
amount to the feeding pump mechanism. The feed-
ing mechanism operates through a vertical inventory
above the pool, regulated by gates, and monitored by
a load cell sensor for precise food dispensation. This
setup includes a 10KG load cell, an HX-711 ampli-
fier, and two servo motors for meticulous gate control
as shown in figure 5.
Figure 5: Feeding pump mechanism.
Figure 6: Mobile app readings.
5 RESULTS & DISCUSSION
This section presents the outcomes of our experiments
using the YOLOv8 model for keypoint detection and
fish counting in Tilapia aquaculture. Our evaluation
demonstrates that YOLOv8 outperforms existing ap-
proaches in both accuracy and speed, making it ex-
ceptionally well-suited for deployment on edge de-
vices in resource-constrained environments.
5.1 YOLOv8 Performance on Tilapia
Dataset
Our experiments demonstrate the superior perfor-
mance of our YOLOv8 model in both keypoint de-
tection and fish counting tasks. Table 2 summarizes
the evaluation metrics for the YOLOv8 model trained
on our custom Tilapia fish dataset.
Table 2: Evaluation metrics for keypoints detection and
fish-counting models trained on Tilapia fish dataset.
Method Precision Recall AP@50 AP@75
YOLOv8 Keypoints 94.50 89.71 99.68 94.16
YOLOv8 Counting 96.21 86.82 98.88 92.47
For the fish counting task, we employed the same
YOLOv8 architecture, which yielded an even higher
precision of 96.21%. This precision metric, derived
from the model’s training report, represents the ra-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
672
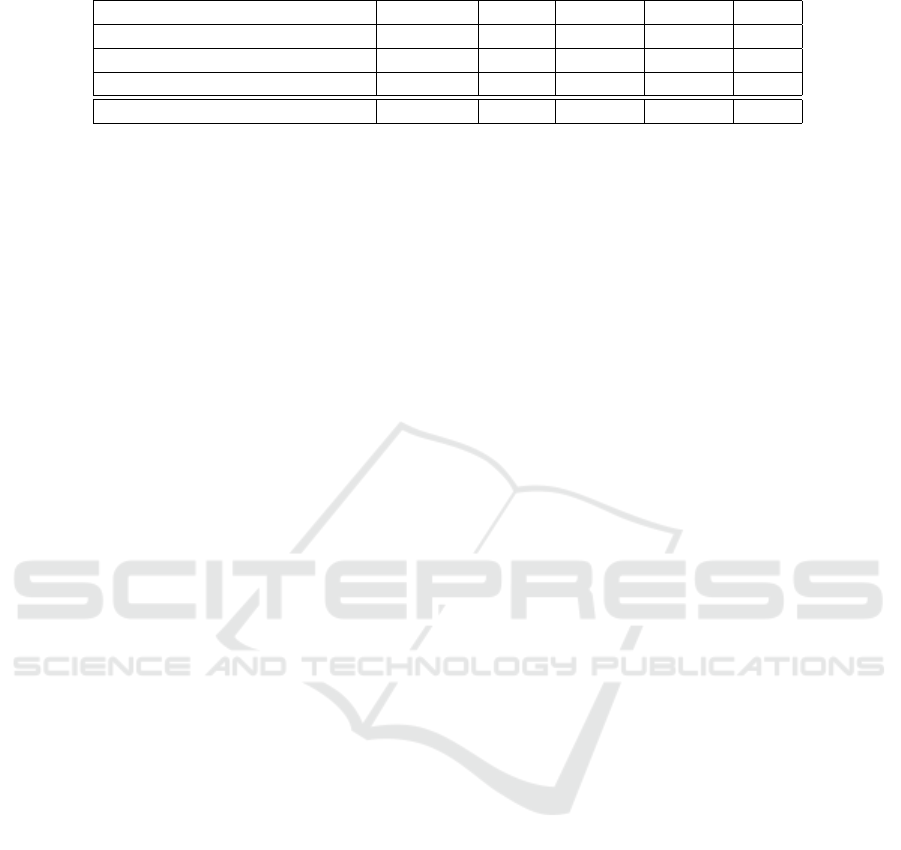
Table 3: Comparison of various scores across different models on the Tilapia dataset on fish Keypoints detection.
Method Precision Recall AP@50 AP@75 AP
Faster R-CNN (Ren et al., 2015) 91.72 85.99 98.50 90.19 67.04
Mask R-CNN (He et al., 2017) 92.61 87.34 99.11 92.12 75.68
RetinaNet (Lin et al., 2017) 90.79 84.26 98.17 83.56 60.53
YOLOv8 (Ours) 94.96 89.06 99.68 94.16 68.04
tio of correctly detected fish to the total number of
detections made by the model. Our fish counting
method utilizes frames captured simultaneously from
two cameras positioned at different angles in the fish
farm. The system processes these paired frames to
provide a more comprehensive view of the fish pop-
ulation, helping to reduce occlusions and improve
counting accuracy.
To validate these results and assess real-world per-
formance, we conducted additional tests on a separate
dataset of 100 frame pairs (200 images total) from ac-
tual fish farm conditions. In these tests, the model
achieved a counting accuracy of 94.5%, with an av-
erage absolute error of 0.7 fish per frame pair. This
close alignment between training metrics and real-
world performance underscores the model’s reliabil-
ity in practical applications.
The high precision and real-world accuracy of our
fish counting model are crucial for accurate popula-
tion estimation, which directly impacts feed calcula-
tion. By combining this accurate count with the av-
erage feeding amount determined from our feeding
allowance table, we can achieve precise feed estima-
tion, minimizing overfeeding and reducing both feed
waste and potential water pollution.
5.2 Comparative Analysis with Existing
Models
To contextualize our results, we compared YOLOv8’s
performance with other state-of-the-art deep learn-
ing models, as reported in (Tengtrairat et al., 2022).
Table 3 presents the comparison of various metrics
across different models (Faster R-CNN(Ren et al.,
2015), Mask R-CNNN (He et al., 2017), Reti-
naNet (Lin et al., 2017), and our YOLOv8 mod-
els (Vasanthi and Mohan, 2024)) on the tilapia
dataset.
As evident from table 3, our YOLOv8 model out-
performs other models in most metrics, particularly
in AP@50 and AP@75. The superior performance
in AP@75 is especially noteworthy, as it indicates
YOLOv8’s ability to maintain high accuracy even
with stricter overlap requirements. This is crucial for
precise keypoint detection in densely populated fish
farms.
While Mask R-CNN shows a higher overall AP
score, which averages performance across all IoU
thresholds, YOLOv8 demonstrates more consistent
performance at the critical AP@50 and AP@75 lev-
els. This suggests that YOLOv8 may be more reliable
for practical applications where moderate to high pre-
cision is required.
5.3 YOLOv8 & Edge Computing
YOLOv8’s architecture is optimized for edge comput-
ing, making it ideal for real-time aquaculture mon-
itoring. Its lightweight design allows efficient pro-
cessing on limited-resource devices, with the nano
version achieving sub-200ms inference times on our
MCU. This efficiency reduces energy consumption
and operational costs. YOLOv8’s scalability ensures
consistent performance across various hardware con-
figurations, from IoT devices to edge servers. Lo-
cal data processing minimizes latency and enables
rapid decision-making without constant server com-
munication. These features address on-site aquacul-
ture management challenges, potentially revolution-
izing Tilapia monitoring. YOLOv8’s reliable perfor-
mance under hardware constraints makes it a superior
choice for transforming aquaculture practices.
5.4 Implications for Aquaculture
Productivity
The high accuracy of our YOLOv8-based system
translates to significant potential improvements in
aquaculture productivity. Based on preliminary as-
sessments and comparisons with traditional methods,
we estimate that our approach can contribute to a 58-
fold increase in production compared to conventional
fish farms, inspired by (SEAFDEC/AQD, 2022). This
dramatic improvement is attributed to:
1. More accurate fish counting, enabling optimal
stocking densities.
2. Precise monitoring of fish growth and health
through keypoint detection.
3. Reduced water pollution and fish mortality due to
timely interventions.
It is important to note that these productivity gains
are theoretical maximums based on optimal condi-
Precision Aquaculture: An Integrated Computer Vision and IoT Approach for Optimized Tilapia Feeding
673

tions and full implementation of our system. Real-
world results may vary depending on specific farm
conditions and management practices.
6 LIMITATIONS AND FUTURE
WORK
The limitations of this study include the use of
datasets from a single fish size in a controlled environ-
ment. Future work should include a diverse range of
fish sizes and environments to improve model gener-
alizability, especially for smaller fish where keypoint
detection is more challenging. Additionally, the cur-
rent system does not account for varying environmen-
tal factors such as water quality, which can influence
fish growth and feeding behavior. Integrating envi-
ronmental monitoring could further optimize feeding
practices. While the YOLOv8 model performed well
on the Tilapia dataset, its applicability to other fish
species remains untested. Lastly, expanding training
datasets to include multiple species could enhance its
utility across different aquaculture contexts.
7 CONCLUSION
This paper used computer vision and IoT technolo-
gies to present a novel system for precise Tilapia fish
feeding. The system utilizes real-time water quality
monitoring and vision-based fish weight estimation
to determine optimal feeding amounts. Our models
demonstrated superior performance with precision of
94% for keypoint detection, and 96% for fish count-
ing, respectively, outperforming Faster R-CNN, Mask
R-CNN, and RetinaNet in key metrics. This study
provides a precise, scalable solution for sustainable
and efficient aquaculture, with recommendations for
further real-world testing and refinement. Lastly, this
approach has the potential to significantly enhance
fish farm productivity (up to 58x) while mitigating
environmental concerns by minimizing pollution and
fish mortality.
REFERENCES
Arditya, I., Setyastuti, T. A., Islamudin, F., and Dinata, I.
(2021). Design of automatic feeder for shrimp farm-
ing based on internet of things technology. Interna-
tional Journal of Mechanical Engineering Technolo-
gies and Applications, 2(2):145–151.
Atoum, Y., Srivastava, S., and Liu, X. (2014). Automatic
feeding control for dense aquaculture fish tanks. IEEE
Signal Processing Letters, 22(8):1089–1093.
Author, F. and Author, L. (Year). Standard methods for
measuring fish length in ichthyological studies. Jour-
nal of Fish Biology, XX(X):XX–XX.
Awad, M., Khanna, R., Awad, M., and Khanna, R. (2015).
Support vector regression. Efficient learning ma-
chines: Theories, concepts, and applications for en-
gineers and system designers, pages 67–80.
Babaee, M., Li, Z., and Rigoll, G. (2019). A dual cnn–
rnn for multiple people tracking. Neurocomputing,
368:69–83.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Froese, R., Thorson, J. T., and Reyes Jr, R. B. (2014).
Length-weight relationships for 40 species of coral
reef fishes from the central philippines. Journal of
Applied Ichthyology, 30(1):219–220.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE International
Conference on Computer Vision (ICCV).
Islamadina, R., Pramita, N., Arnia, F., and Munadi, K.
(2018). Estimating fish weight based on visual cap-
tured. In 2018 International Conference on Infor-
mation and Communications Technology (ICOIACT),
pages 366–372. IEEE.
Jerry, D. and Cairns, S. (1998). Morphological variation
in the catadromous australian bass, from seven geo-
graphically distinct riverine drainages. Journal of Fish
Biology, 52(4):829–843.
Jisr, N., Younes, G., Sukhn, C., and El-Dakdouki, M. H.
(2018). Length-weight relationships and relative con-
dition factor of fish inhabiting the marine area of the
eastern mediterranean city, tripoli-lebanon. The Egyp-
tian Journal of Aquatic Research, 44(4):299–305.
Kim, D., Ka, W., Ahn, P., Joo, D., Chun, S., and Kim,
J. (2022). Global-local path networks for monocular
depth estimation with vertical cutdepth. arXiv preprint
arXiv:2201.07436.
Li, B., Wu, W., Wang, Q., Zhang, F., Xing, J., and Yan,
J. (2019). Siamrpn++: Evolution of siamese visual
tracking with very deep networks. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 4282–4291.
Li, L., Dong, B., Rigall, E., Zhou, T., Dong, J., and Chen,
G. (2021). Marine animal segmentation. IEEE Trans-
actions on Circuits and Systems for Video Technology,
32(4):2303–2314.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lupatsch, I. (2022). Optimized feed management for inten-
sively reared tilapia. Accessed: 2024-06-09.
M Osman, H., A Saber, M., A El Ganainy, A., and M Shaa-
ban, A. (2020). Fisheries biology of the haffara bream
rhabdosaragus haffara (family: Sparidae) in suez bay,
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
674

egypt. Egyptian Journal of Aquatic Biology and Fish-
eries, 24(4):361–372.
Ma
´
ckiewicz, A. and Ratajczak, W. (1993). Principal com-
ponents analysis (pca). Computers & Geosciences,
19(3):303–342.
Mathiassen, J. R., Misimi, E., Toldnes, B., Bondø, M., and
Østvik, S. O. (2011). High-speed weight estimation
of whole herring (clupea harengus) using 3d machine
vision. Journal of food science, 76(6):E458–E464.
Newell, A., Yang, K., and Deng, J. (2016). Stacked
hourglass networks for human pose estimation. In
Computer Vision–ECCV 2016: 14th European Con-
ference, Amsterdam, The Netherlands, October 11-
14, 2016, Proceedings, Part VIII 14, pages 483–499.
Springer.
Oostlander, P., van Houcke, J., Wijffels, R. H., and Barbosa,
M. J. (2020). Microalgae production cost in aquacul-
ture hatcheries. Aquaculture, 525:735310.
Reis, D., Kupec, J., Hong, J., and Daoudi, A. (2023).
Real-time flying object detection with yolov8. arXiv
preprint arXiv:2305.09972.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Riche, M. and Garling, D. (2003). Feeding tilapia in inten-
sive recirculating systems.
Riyandani, R., Jaya, I., and Rahmat, A. (2023). Com-
puter vision-based fish feed detection and quantifica-
tion system. Journal of Applied Geospatial Informa-
tion, 7(1):832–839.
Roboflow (2022). Roboflow. https://roboflow.com/.
Rother, C., Kolmogorov, V., and Blake, A. (2004). ” grab-
cut” interactive foreground extraction using iterated
graph cuts. ACM transactions on graphics (TOG),
23(3):309–314.
Router, O. (2024). What is mqtt? Accessed: 2024-05-31.
Saleh, A., Jones, D., Jerry, D., and Azghadi, M. R. (2023).
Mfld-net: a lightweight deep learning network for
fish morphometry using landmark detection. Aquatic
Ecology, 57(4):913–931.
Sanchez-Torres, G., Ceballos-Arroyo, A., and Robles-
Serrano, S. (2018). Automatic measurement of fish
weight and size by processing underwater hatchery
images. Engineering Letters, 26(4):461–472.
Sandler, M., Baccash, J., Zhmoginov, A., and Howard, A.
(2019). Non-discriminative data or weak model? on
the relative importance of data and model resolution.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision Workshops, pages 0–0.
SEAFDEC/AQD (2022). Farmers must understand the
costs of tech-driven aquaculture. Accessed: 2024-06-
06.
Soetedjo, A. and Somawirata, I. K. (2019). Improv-
ing traffic sign detection by combining mser and lu-
cas kanade tracking. IMPROVING TRAFFIC SIGN
DETECTION BY COMBINING MSER AND LUCAS
KANADE TRACKING, 15(2):1–13.
STMicroelectronics (2024). Stm32f103c8 microcontroller.
Accessed: 2024-05-31.
Su, X. and Khoshgoftaar, T. M. (2009). A survey of col-
laborative filtering techniques. Advances in artificial
intelligence, 2009(1):421425.
Tang, S., Andriluka, M., Andres, B., and Schiele, B. (2017).
Multiple people tracking by lifted multicut and per-
son re-identification. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3539–3548.
Tengtrairat, N., Woo, W. L., Parathai, P., Rinchumphu, D.,
and Chaichana, C. (2022). Non-intrusive fish weight
estimation in turbid water using deep learning and re-
gression models. Sensors, 22(14):5161.
Tolstikhin, I. O., Houlsby, N., Kolesnikov, A., Beyer, L.,
Zhai, X., Unterthiner, T., Yung, J., Steiner, A., Key-
sers, D., Uszkoreit, J., et al. (2021). Mlp-mixer: An
all-mlp architecture for vision. Advances in neural in-
formation processing systems, 34:24261–24272.
Tseng, C.-H., Hsieh, C.-L., and Kuo, Y.-F. (2020). Auto-
matic measurement of the body length of harvested
fish using convolutional neural networks. Biosystems
Engineering, 189:36–47.
Vaquero, L., Mucientes, M., and Brea, V. M. (2021).
Siammt: Real-time arbitrary multi-object tracking.
In 2020 25th International Conference on Pattern
Recognition (ICPR), pages 707–714. IEEE.
Vasanthi, P. and Mohan, L. (2024). Multi-head-self-
attention based yolov5x-transformer for multi-scale
object detection. Multimedia Tools and Applications,
83(12):36491–36517.
Zhang, L., Wang, J., and Duan, Q. (2020a). Estima-
tion for fish mass using image analysis and neural
network. Computers and Electronics in Agriculture,
173:105439.
Zhang, Y., Wang, C., Wang, X., Zeng, W., and Liu, W.
(2020b). A simple baseline for multi-object tracking.
arXiv preprint arXiv:2004.01888, 7(8).
Zhu, Z., Wang, Q., Li, B., Wu, W., Yan, J., and Hu, W.
(2018). Distractor-aware siamese networks for visual
object tracking. In Proceedings of the European con-
ference on computer vision (ECCV), pages 101–117.
Precision Aquaculture: An Integrated Computer Vision and IoT Approach for Optimized Tilapia Feeding
675
