
A Study on Optimizing Signal Path in Model Predictive Control and
Fault Detection System of Three-Tank Pilot System Using Reference
Architecture
Jukka Kortela
1 a
, Yared Tadesse
2
and Kim Miikki
2
1
Aalto University School of Chemical Engineering, P.O. Box 16100, FI-00076 Aalto, Espoo, Finland
2
Bellmer Finland Oy, Vanha Messil
¨
antie 6, 15860 Hollola, Finland
fi fi
Keywords:
Cyber Physical System, Industrial Internet of Things, Rami, Iira, Model Predictive Control, Three Tank
System, Model, Experiment, Fault Detection, Fault Diagnosis, Parity Equations.
Abstract:
This paper presents the model predictive control and fault detection and diagnosis system of a three-tank pilot
within a novel cloud-integrated industrial automation framework. The system architecture includes a state-
of-the-art NodeJS-based gateway facilitating communication between the cloud service and the automation
system. OPC DA has not been updated to function with the latest programming libraries and operating systems,
which significantly reduces the performance of automation systems. The optimized signal path through the
OPC DA is developed and compared to the OPC UA tunneller implementation through experiments on a real
three-tank pilot system with an industrial ABB 800xA automation system. The results demonstrate that the
optimized signal path significantly reduces the control interval by a factor of 5, leading to a quicker controller
response. In fault detection and diagnosis, the delay is only 22 milliseconds with an optimized signal path
compared to 408 milliseconds when using OPC UA tunneler software.
1 INTRODUCTION
Since the invention of the Programmable Logic Con-
troller (PLC) in 1968, industrial automation has
passed through milestones marked by advances in in-
formation technology. The first milestone is the link-
ing of the PLC with the personal computer (PC) in
1986. The next main milestone was reached in 1992
with the introduction of Ethernet and Transmission
Control Protocol and Internet Protocol (TCP/IP) con-
nectivity for PLCs. The current trend in industries is
the transformation from industrial Ethernet and wire-
less communications to advanced information tech-
nology (IT) solutions where traditional automation is
merged with cyber-physical systems (CPS) combin-
ing communications, information and communication
technology (ICT), data and physical elements and the
ability to connect devices to one another. This trans-
formation results in what is now known as Industrial
Internet of Things (IIoT) or the 4th Industrial Revolu-
tion (Industry 4.0) where every step of a manufactur-
ing process is interconnected. Cloud computing and
a
https://orcid.org/0000-0001-7831-1413
data analytics are among the technologies driving the
IIoT. (IEC, 2015)
According to IEEE, the term architecture in the
context of information technology is ”the fundamen-
tal organization of a system embodied in its compo-
nents, their relationships to each other, and to the en-
vironment, and the principles guiding its design and
evolution”. (IEEE, 2022)
A reference architecture in the context of infor-
mation technology documents such things as hard-
ware, software, processes, specifications and config-
urations, logical modules and interrelationships. Ac-
cording to IBM Rational Unified Process, a reference
architecture “is, in essence, a predefined architectural
pattern, or set of patterns, possible partially or com-
pletely instantiated, designed, and proven for use in
particular business and technical contexts, together
with supporting artifacts to enable their use. Often,
these artifacts are harvested from previous projects”.
(Evensen, 2013)
A reference architecture for IIoT serves the pur-
pose of providing common and consistent definitions
for the IIoT, its subsystems and design patterns, and a
Kortela, J., Tadesse, Y. and Miikki, K.
A Study on Optimizing Signal Path in Model Predictive Control and Fault Detection System of Three-Tank Pilot System Using Reference Architecture.
DOI: 10.5220/0012995400003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 351-358
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
351

common lexicon and taxonomy for discussing
specification of implementations of IIoT.
Currently, there are several reference architectures
that can be employed for deploying Factory of Fu-
ture (FoF). Two of the most popular reference archi-
tectures, RAMI 4.0 and IIRA, and their interoper-
ability will be discussed in the following paragraphs.
RAMI 4.0 is the product of Industrie 4.0, which is
a national project of the German government initi-
ated in 2011 through German’s Ministry of Education
and Research (BMBF) and the Ministry for Economic
Affairs and Energy (BMWI) (European Commission,
2017), which has since been joined by industries and
academia to form a consortium called Plattform In-
dustrie 4.0. Industrie 4.0 aims to increase value in
manufacturing and decrease waste by transforming
the way products are developed, produced, managed,
and consumed. The project focuses on the industrial
manufacturing sector and connects value chains by in-
tegrating things and processes to form cyber physical
systems (CPS). The novelty of Industrie 4.0 results
from the combination of already existing and new
technologies such as embedded computers, intelligent
sensors, mobile broadband internet access, and Radio
Frequency Identification (RFID) in the industrial en-
vironment into a uniform, integrated solution through
standardized communication. (VDI Verein Deutscher
Ingenieure e.V., 2015) The Industrie 4.0 concept is
implemented through RAMI 4.0; a service-oriented
architecture that has been designed for efficient shar-
ing of data and information between all the sharehold-
ers taking part in the Industrie 4.0 ecosystem. RAMI
4.0 (registered DIN SPEC 91345 in Germany) en-
sures that all participants in Industrie 4.0 share a com-
mon perspective and build a common understanding.
(DIN, 2016)
The Industrial Internet Consortium (IIC) first pub-
lished IIRA in the form of a Technical Report in
2015. Founded by AT&T, Cisco, General Electric,
IBM, and Intel, the mission of IIC is to reach indus-
trial interoperability and consensus on IIoT platforms.
The IIC is a part of the Object Management Group
(OMG) and today has 19 working groups and over
250 members of industrial and academic background.
In July 2019, the latest version of IIRA, IIRA v1.9,
was published by the Industrial Internet Consortium
Architecture Task Group, which is a subset of the
IIC Technology Working group. (Industrial Internet
Consortium, 2019) IIRA is a reference architecture
of what IIC calls Industrial Internet Systems (IIS).
These systems are defined as end-to-end application
systems for industrial tasks. They include technical
components as well as interactions with users. Ac-
cording to the IIC, IIRA is a ”business-value-driven
and concern-resolution-oriented” reference architec-
ture for the IIoT. (Industrial Internet Consortium,
2019) IIRA itself is based on the Industrial Internet
Architecture Framework (IIAF), which provides ba-
sic conventions, principles and definitions. The IIAF
builds on the international standard ISO / IEC / IEEE
42010: 2011 and performs basic architectural descrip-
tion constructs, such as Concern, Stakeholders, and
Viewpoint. The viewpoints are one of the key build-
ing blocks of IIS. There are four viewpoints: Busi-
ness, Usage, Functional, and Implementation. (Indus-
trial Internet Consortium, 2019)
1.1 Industrial Data Protocols
The goal of the Industry 4.0 research initiative is to
enable networked, flexible and therefore adaptive pro-
duction. The challenge here is that production data is
often very distributed and heterogeneous. As a solu-
tion to this, the OPC Unified Architecture (OPC UA)
standard provides a context-based data description
model alongside its communication protocol specifi-
cation. In OPC UA, metadata is defined with stan-
dardized data models that enable a uniform under-
standing of the data in the value chain.
There are several technologies that provide the
functionality needed to bridge the operational tech-
nology (OT) and information technology (IT) gap
(Bonomi et al., 2012), such as, time-sensitive net-
working (TSN), cloud computing and OPC Unified
Architecture (OPC UA). Although TSN has received
a lot of attention, a suitable technology such as OPC
UA PubSub was only recently explored for its poten-
tial to meet tight timing guarantees [5], [6]. How-
ever, an open issue is that the timing guarantees are
only valid if the OPC UA PubSub is isolated from the
OPC UA client-server communication model. The
reason is that both communication paradigms use a
shared data model, which raises issues related to si-
multaneous data access that need to be addressed. A
client-server instance may prevent access to PubSub
data or change the value during a read operation with
unexpected consequences. Analysis in (Denzler et al.,
2022) includes the overall RT-TSN-OPC UA concept,
an analysis of common concurrent data access mech-
anisms for their suitability, and identifying critical
code segments in the open62541 OPC UA stack.
The work in (Großmann et al., 2014) describes
an approach to modeling the information of an ag-
gregated OPC UA server to combine the representa-
tion of a single entity in different data models. The
work in (M
¨
uller et al., 2022) presents a methodology
for the integration of standardized information mod-
els into existing OPC UA servers. However, the prob-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
352

lem is the overhead brought by the automatic OPC
UA adapter in time-critical systems.
In (Reiswich and Fay, 2012), the authors outline
a method for migrating an OPC DA (Data Access)
server to the OPC UA standard. The integration of
the data model existing in the DA server is done by
manually mapping each of the corresponding nodes.
The work in (Reiswich and Fay, 2012) is suitable for
model integration in this context of paper, but its dis-
advantage is the lack of automatic mapping. To meet
above challenges, this paper implements the OPC DA
and OPC UA NodeJS libraries, which enable auto-
matic mapping and an optimized connection to time-
critical systems.
1.2 The Control of the Three-Tank
System
A comparison of Model Predictive Control (MPC)
with Proportional-Integral-Derivative (PID) control
has been conducted in (Kortela, 2022). The perfor-
mance can also be compared with Internal Model
Control (IMC) using a similar interval of 100 ms, as
presented in (Ujjwal Manikya Nath and Mudi, 2023).
Newer methods beyond classical PID include Adap-
tive Safe Experimentation Dynamics (ADED) (Ghaz-
ali, 2019) and methods utilizing Nonlinear Constraint
Optimization (Govind et al., 2023). Both linear and
nonlinear schemes were able to achieve the primary
objective of controlling the liquid level of the system.
However, when choosing the appropriate scheme to
apply, stakeholders must consider a trade-off between
accurate system representation and the ease or cost
of implementation (Samuel Emebu, 2023). In (Alhas-
san Osman and Arıcı, 2023), the Adaptive Pole Place-
ment Controller (APPC) method is extended by incor-
porating it with a Sliding Mode Controller (SMC) to
enhance system robustness. Nevertheless, in real im-
plementations, the data transfer rate has a significant
effect on performance.
The rest of this paper is structured as follows:
The optimized signal path and the three-tank sys-
tem are utilized in both Model Predictive Control
(MPC) and fault detection, and have been presented
in Section II and Section III, respectively. Section IV
presents the model predictive control of the three-tank
system, while Section V introduces the fault detection
method applicable to this system. In Section VI, the
architecture of the proposed method is detailed. Sec-
tion VII presents the test results of the MPC and fault
detection system using the optimized signal path. Fi-
nally, Section VI presents the conclusions of the pro-
posed method.
2 OPTIMIZED SIGNAL PATH
WITH OPC DA
This document proposes an approach that makes it
possible to make the data of an already existing OPC
DA server available for an optimized OPC UA server.
The structure consists of four components: Wireless
Arduino MKR WiFi 1010 + Raspberry Pi 3 Model
B+ (2.1), optimized OPC DA client 2.2), NodeJS DA
Client (2.3), and Gateway PC + Spring framework
(2.4).
Fig. 1 shows the Arduino MKR WiFi 1010, where
3 level measurements are connected to the analog in-
puts of the Arduino.
2.1 Wireless Arduino MKR WiFi 1010
+ Raspberry Pi 3 Model B+
1. In Arduino code, the value of the tank level 1, for
example, is read from the first pin with the call
sensorValue = analogRead(A0);
2. The value is scaled by executing the command
outputValue = map(sensorValue, 0, 1023, 0,
255);
3. Finally, the scale and value are written to the serial
port with commands:
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\t output = ");
Serial.print(outputValue);
4. The OPC UA server is created by calling
new opcua.OPCUAServer()
5. Correspondingly, to read the serial port input, an
object is created with the call
new SerialPort( { path: ’/dev/ttyACM0’,
baudrate: 9600 } )
6. To read the serial port, an object is created with
the
new ReadlineParser()
command, and writing data to the port triggers the
”on” event for the object.
7. The object ”ThreeTank” is added to addressSpace
with command addObject and its component as
nodeId ”Level 1” is added with command
namespace.addVariable
8. When the ”on” event occurs, a new value is writ-
ten to the ”Level 1” component.
A Study on Optimizing Signal Path in Model Predictive Control and Fault Detection System of Three-Tank Pilot System Using Reference
Architecture
353
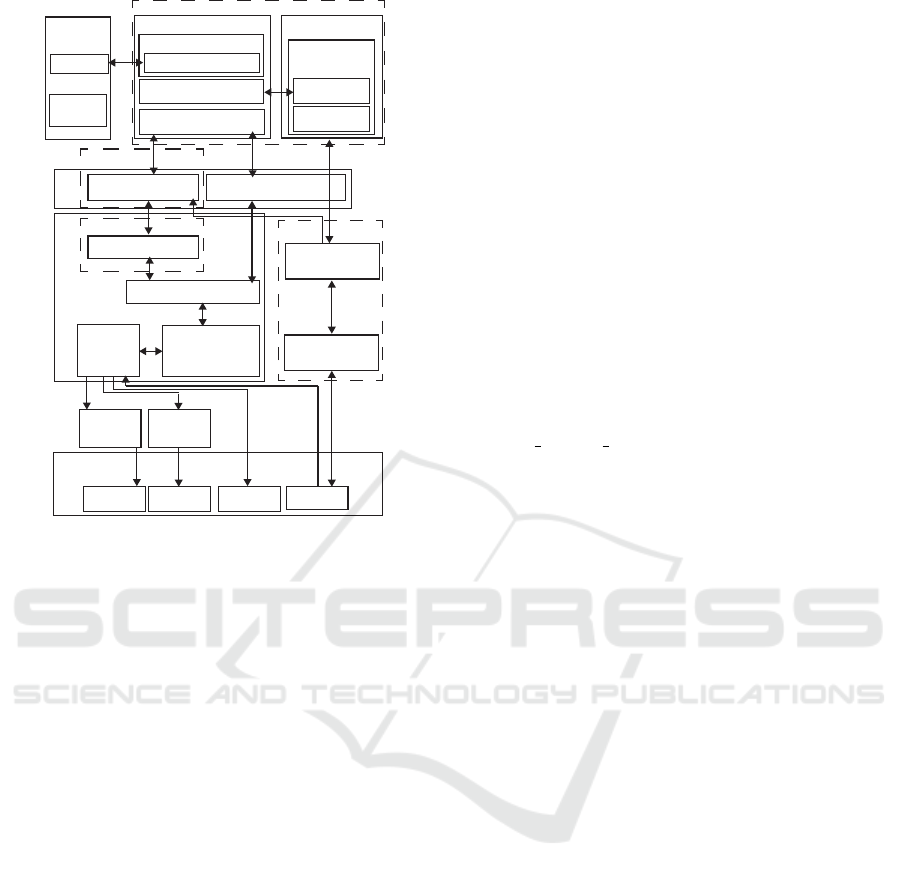
NodeJS OPC UA Client
NodeJS OPC UA Server
NodeJS OPC DA Client
OPC UA Tunneller
MPC
C++ OPC DA Client
ABB OPC Server
Gateway PC (NodeJS)
express web server
io sockets
Web browser
User
interface (UI)
io sockets
Cloud
Java Spring
Application
Parity equations
async JSON
ABB System 800xA
ABB PM856A PLC
ABB AO820
ABB AI801
ABB DO801
Inverter 1 Inverter 2
Pump 1 Pump 2
Valves
Level
sensors
Amira DTS200
three-tank system
Wireless Arduino
MKR WiFi 1010
Raspberry Pi 3
Model B+
Figure 1: The architecture of the model predictive control
and fault detection system in the cloud.
2.2 Optimized OPC DA Client
In this paper an OPC DA client has been implemented
and it has been compiled with Visual Studio 2019 so
that it would be available on the latest Windows op-
erating system such as 10 and 11 and, for example,
the latest NodeJS. Corresponding branches in the tar-
get OPC DA server must be found and listed. In an
optimized way, the branch should be interpreted only
when it is opened.
1. First, the position is moved to the root with the
command
ChangeBrowsePosition(OPC_BROWSE_TO,
W2OLE(const_cast<wchar_t *>(
parentItemPath.c_str() ) ) );
2. With the method
ChangeBrowsePosition(OPC_BROWSE_DOWN,
itemPath)
we go down the branch.
3. All branch leaves are read with
BrowseOPcitepmIDs(OPC_BRANCH, emptyString,
VT_EMPTY, 0, &iEnum );
and the name of the list with
GetItemID(itemName, &FullName);
4. The item is first added to the group of type
IOPcitepmMgt with the command
AddItems(1, &itemDef, &pResults, &pErrors);
5. After that, the value can be written with the
IOPCSyncIO object with the command
Write(1, &hServer, &value, &pErrors)
and read with command
Read(OPC_DS_DEVICE, 1, &hServer,
&pItemState, &pErrors)
2.3 NodeJS OPC DA Client
With NAN module of NodeJS you can use a tem-
plate to wrap C++ functions and data structures within
JavaScript objects so that they can be manipulated
from JavaScript. In this document, NodeJS calls to
the C++ OPC DA Client were implemented, so that
branches of the OPC DA server can be called through
the NodeJS OPC UA server in an optimized way.
1. NAN MODULE INIT() sets entry points for Node
add-ons. It makes an object that corresponds to
JavaScript’s export command object.
2. Nan::Set(target, New<string>( \\
"ReadOPCDAValue").ToLocalChecked(), \\
GetFunction(New<functionTemplate>( \\
ReadOPCDAValue)).ToLocalChecked());
add a NodeJS method to read the OPC DA proto-
col value.
2.4 Gateway PC + Spring Framework
1. The gateway PC reads the data from the OPC UA
server and sends the data so that the header con-
tains the names of the data columns and the data as
a whole is a table. Compared to name-value pairs,
the data takes up significantly less space and can
be created directly as a data table for the native
language as shown in Fig. 2 and Fig. 3.
2. Spring framework automatically converts json-
string into Java objects.
3 MODELLING OF THE
THREE-TANK SYSTEM
The development and validation of the three-tank sys-
tem are detailed in (Kortela, 2022). The three-tank
system consists of tanks T
1
, T
3
, and T
2
with the same
cross-sectional area A
b
, as shown in Fig. 4. These
cylindrical tanks are connected in series by a cylindri-
cal pipe with cross-sectional area A
c
. Liquid is col-
lected in a reservoir and is pumped back into tanks T
1
and T
2
using pumps 1 and 2 to maintain their levels.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
354
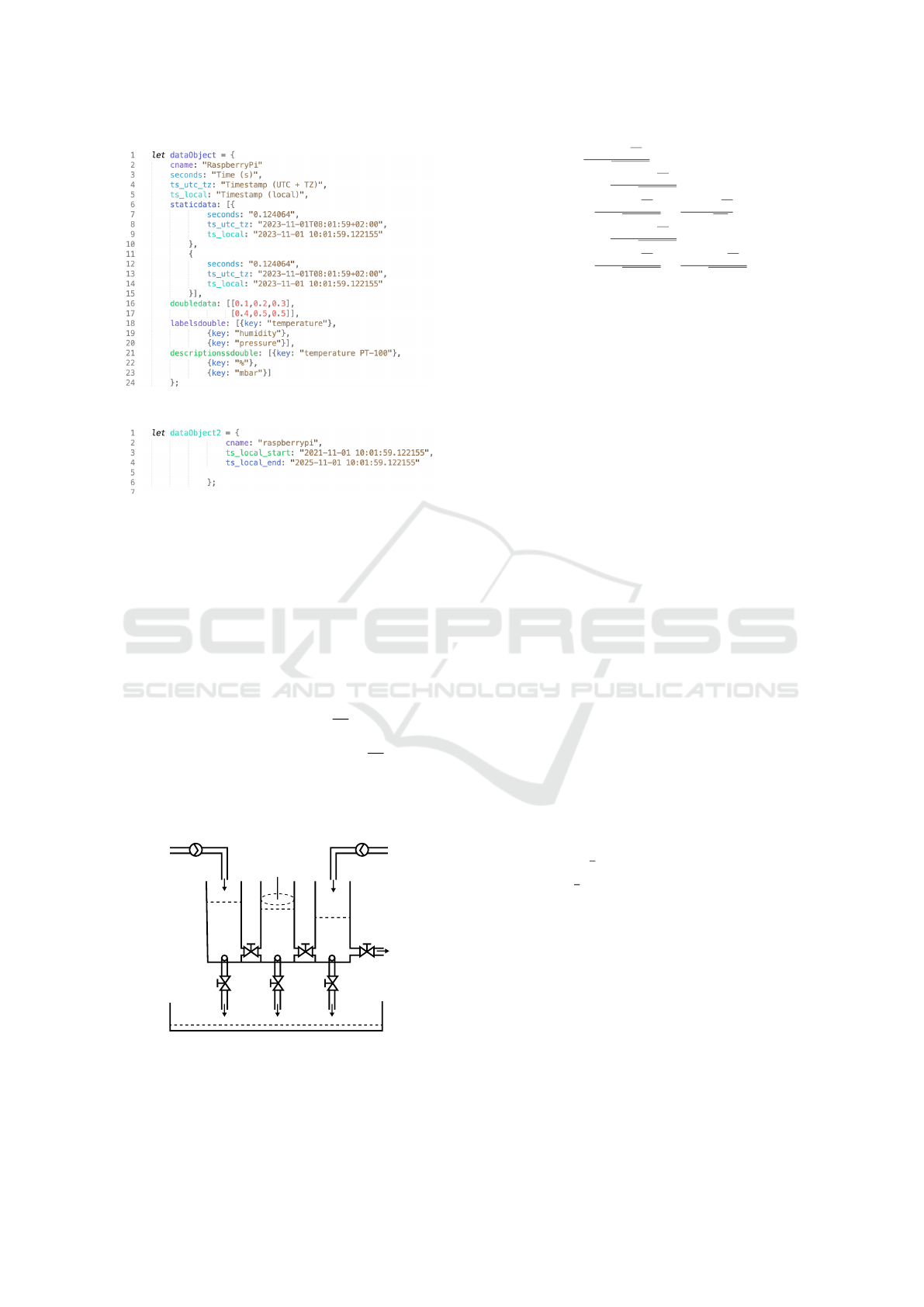
Figure 2: Optimized data structure to save data.
Figure 3: Optimized data structure to retrieve data.
All tanks are equipped with a piezo-resistive pressure
transducer that measures the liquid level in the tank.
The flow rates of pumps 1 and 2 are represented by
Q
1
and Q
2
, respectively. The flow rate provided by a
pump is proportional to the DC voltage applied to its
motor. In the tested system, valves V
13
, V
32
, and V
3O
were open and leakage valves V
L1
, V
L3
, and V
L2
were
closed. The linearized state-space model parameters
are given by
A =
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
,B =
1
A
b
0
0
1
A
b
0 0
C =
1 0 0
0 1 0
,D = 0
(1)
T
1
T
3
T
2
V
13
V
32
V
2O
V
L1
V
L3
V
L2
Pump 1
Pump 2
A
b
Q
1
h
1
h
3
h
2
Q
2
Figure 4: Three-tank system.
a
11
= −
α
13
A
c
√
2g
2A
b
√
h
1s
−h
3s
,a
12
= a
21
= 0,
a
13
= a
31
=
α
13
A
c
√
2g
2A
b
√
h
1s
−h
3s
,
a
22
= −
α
32
A
c
√
2g
2A
b
√
h
3s
−h
2s
+
α
2O
A
c
√
2g
2A
b
√
h
2s
,
a
23
= a
32
=
α
32
A
c
√
2g
2A
b
√
h
3s
−h
2s
a
33
= −
α
13
A
c
√
2g
2A
b
√
h
1s
−h
3s
+
α
32
A
c
√
2g
2A
b
√
h
3s
−h
2s
(2)
where A is the state matrix, B is the input matrix, C
is the output matrix, D is the matrix that describes
which inputs affect directly the outputs, α
i j
∈ [0,1]
denotes the outflow coefficient between tank i, j and
out from the tank 2, g is the gravity constant, and h
1s
,
h
2s
and h
3s
are the operating points of the three levels,
respectively.
4 MODEL PREDICTIVE
CONTROL FOR THE THREE
TANK PILOT SYSTEM
4.1 State-Space Model Based MPC
As a detailed physical model of the three-tank system
was available, it was a natural choice to use the lin-
earized version of that model directly with MPC. The
inputs to the MPC are the reference values for the two
water levels (r) and the measured process outputs for
the levels (y). The outputs of the MPC are the manip-
ulated variables, the speeds of the two water pumps
(u). The linear state space system for the MPC is as
follows (Maciejowski, 2002):
x(k + 1) = Ax(k) + Bu(k) + Ed(k)
z(k) = Cx(k)
(3)
where x are the states, E is the disturbance matrix
and d are the disturbances. The regularized l
2
out-
put tracking problem with the input, the input rate of
movement, and the output constraints is formulated as
minφ =
1
2
∑
N
p
k=1
∥z(k) −r(k)∥
2
Q
z
+
1
2
∑
N
p
−1
k=1
∥∆u(k)∥
2
S
s.t.x(k + 1) = Ax(k) + Bu(k) + Ed(k),
k = 0,1, . . . ,N
p
−1
z(k) = Cx(k), k = 0,1,..., N
p
u
min
≤ u(k) ≤ u
max
,k = 0, 1, . . .,N
p
−1
∆u
min
≤ ∆u(k) ≤ ∆u
max
,k = 0, 1, . . .,N
p
−1
z
min
≤ z(k) ≤ z
max
,k = 1, 2, . . .,N
p
(4)
where ∆u(k) = u(k) −u(k −1) and N
p
is the predic-
tion horizon, r is the future target vector, Q
z
is the
tracking error weight matrix, and S is the move sup-
pression factor weight matrix. Sizes of the stacked
matrices Z, R, U and D depend on the prediction hori-
zon N
p
.
A Study on Optimizing Signal Path in Model Predictive Control and Fault Detection System of Three-Tank Pilot System Using Reference
Architecture
355
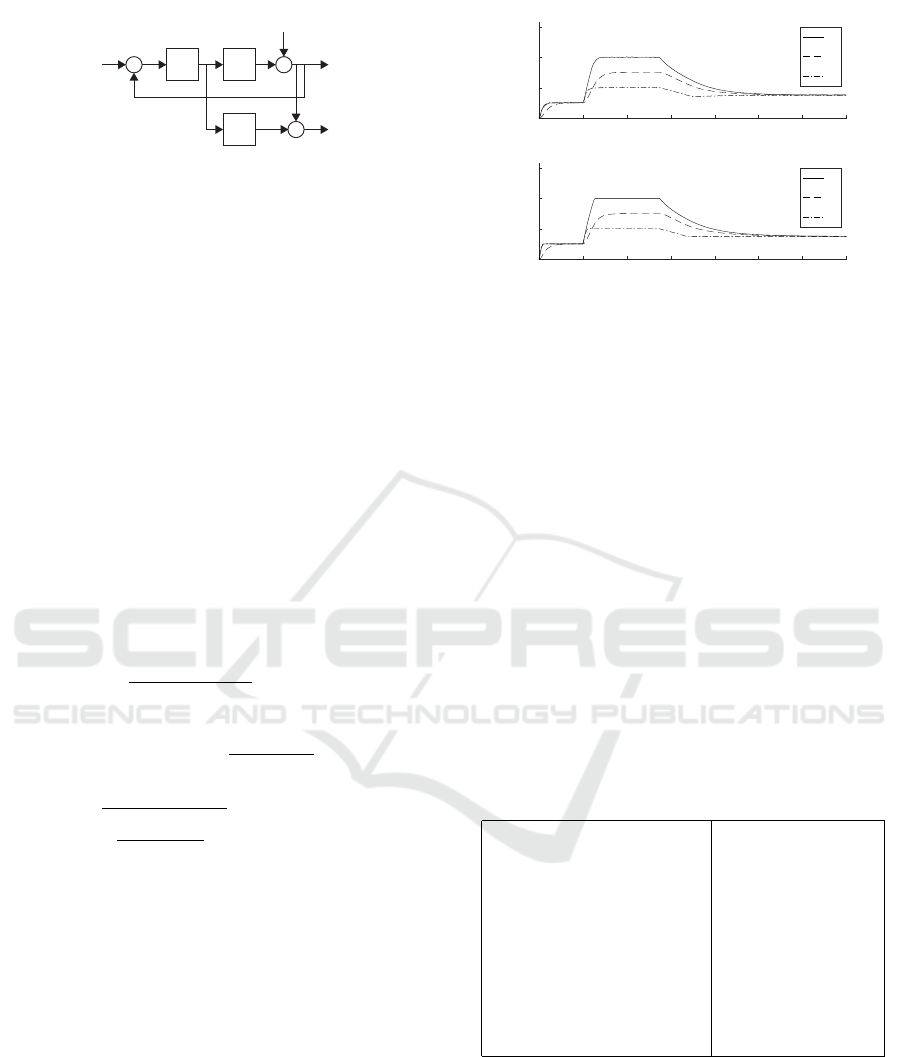
G
c
e
n
yw
G
m
r’
-
-
+
u
G
p
Figure 5: Fault detection of closed loop with parity equa-
tions and output error r
′
.
5 FAULT DETECTION WITH
PARITY EQUATIONS
Parity equations were also chosen to identify the fault
because the exact model of the three-tank system was
available (Isermann, 2006).
5.1 Model-Based Methods for
Closed-Loop Supervision
Application of parity equations in closed-loop is con-
sidered. As shown in Fig. 5 a residual r is generated
by using a fixed model. The calculation of the output
error is as follows:
r
′
(s) = y
p
(s) −y
m
(s) = y
p
(s) −G
m
(s)u(s) (5)
y
p
(s) = G
p
(s)u(s) + n(s) (6)
u(s) =
G
c
(s)
1 + G
c
(s)G
p
(s)
(w(s) −n(s)) (7)
r
′
(s) = (G
p
(s) −G
m
(s))u(s) + n(s)
= (G
p
(s) −G
m
(s))
G
c
(s)
1+G
c
(s)G
p
(s)
(w(s) −n(s))
+n(s)
=
G
c
(s)(G
p
(s)−G
m
(s))
1+G
c
(s)G
p
(s)
w(s)
+
1+G
c
(s)G
m
(s)
1+G
c
(s)G
p
(s)
n(s)
(8)
If the model agree with the real process, G
p
(s) =
G
(
s), it holds
r
′
(s) = n(s) (9)
6 THE ARCHITECTURE OF THE
MODEL PREDICTIVE
CONTROL FOR THE THREE
TANK PILOT SYSTEM IN THE
CLOUD
The experimental setup consists of a cloud with a Java
Spring Application and MPC and the fault detection
system implemented in Java. Apache Commons Math
3.6.1 API and oj! Algorithms (ojAlgo) were utilized
0 200 400 600 800 1000 1200 1400
time (s)
0
0.2
0.4
0.6
height (m)
h
1
h
3
h
2
0 200 400 600 800 1000 1200 1400
time (s)
0
0.2
0.4
0.6
height (m)
h
1
h
3
h
2
Figure 6: Levels’ response in experimental setup utilizing
OPC UA tunneller (above). Levels’ response in experimen-
tal setup utilizing NodeJS OPC UA server and OPC DA
client (below).
to implement MPC, as shown in Fig. 1. The gateway
PC reads the level measurements and writes the values
of the pumps via the NodeJS OPC UA Server and al-
ternatively through the OPC UA tunneller software. It
communicates with the cloud through the JSON pro-
tocol. The web browser receives the new pump and
level values through the IO socket and draws them to
the user interface using HTML 5 canvas. The connec-
tions of the ABB PM856A PLC and cards are defined
in ABB Control Builder M Professional.
7 EXPERIMENTAL RESULTS OF
THE OPTIMIZED SIGNAL
PATH
Table 1: Three tank system parameters.
Cross section (tanks) (A
b
) 0.0154m
2
Cross section (pipes) (A
c
) 5 ·10
−5
m
2
Valve opening (α
i j
) α
i j
= 0.84
Max flow rate (Q
max
) 1.2 ·10
−4
m
3
/s
Maximum level (h
max
) 0.63m
Operating point Q
1
= 7 ·10
−5
m
3
/s
Q
2
= 4 ·10
−5
m
3
/s
h
1
= 0.45m
h
2
= 0.25m
h
3
= 0.35m
7.1 Experimental Results of MPC of
Three-Tank System
The MPC was tested on Heroku Cloud with ps:scale
web=1, on a cloud server with an Intel Xeon Gold
6248 CPU and 16 GB of memory, as well as on a
Macbook Pro with an Apple M1 processor and 16
GB of memory. The execution time of MPC on these
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
356
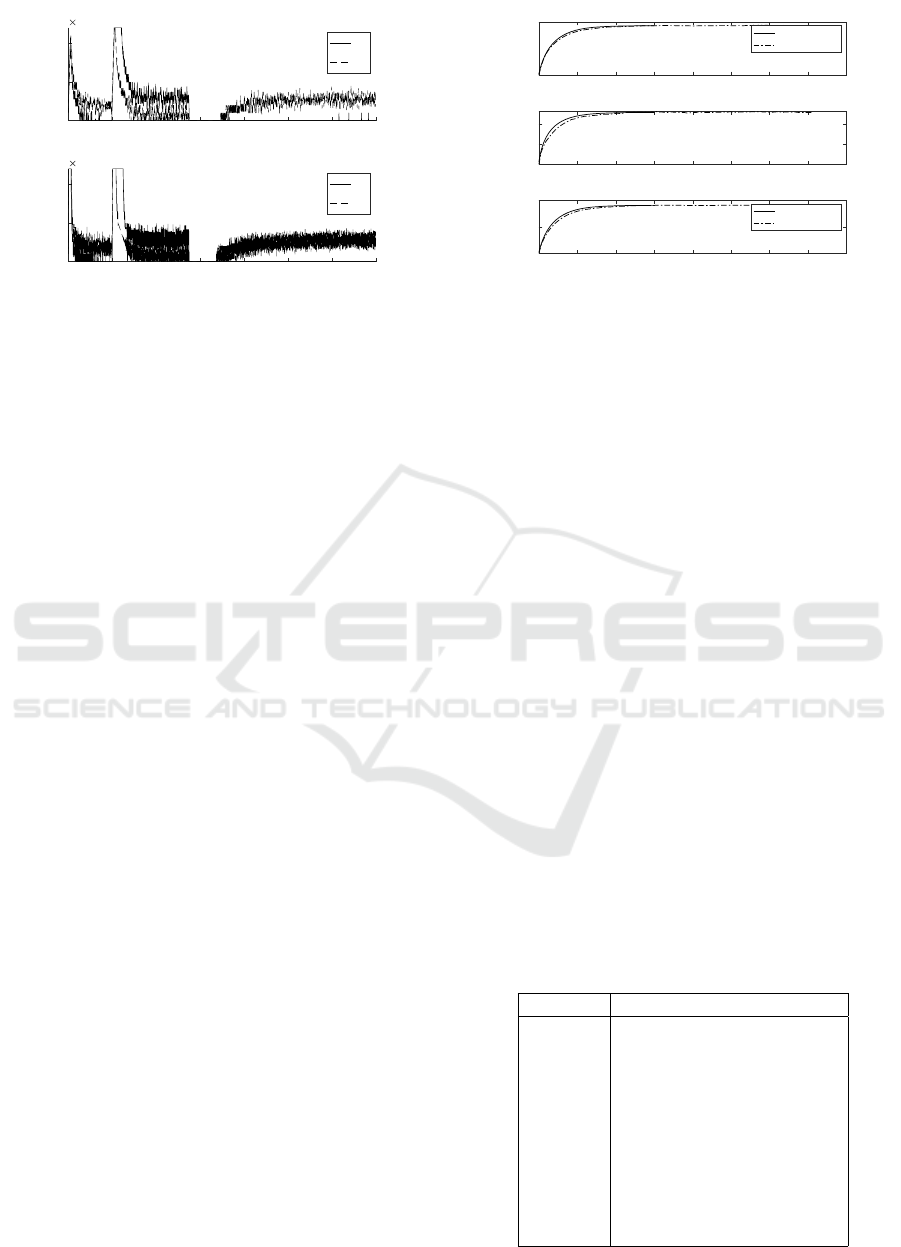
0 200 400 600 800 1000 1200 1400
time (s)
0
0.5
1
flow [m
3
/s]
10
-4
Q
1
Q
2
0 200 400 600 800 1000 1200 1400
time (s)
0
0.5
1
flow [m
3
/s]
10
-4
Q
1
Q
2
Figure 7: Input flow rates in experimental setup utilizing
NodeJS OPC UA server and OPC DA client (above). Input
flow rates in experimental setup utilizing OPC UA tunneller.
(below).
systems was approximately 100 ms, which was the
limiting factor for the speed of MPC. The OPC UA
tunneller software and ABB OPC Server with their 3
level variables and 2 pump variables limited the con-
trol interval to around 0.5 second. The parameters
were substituted by The MPC was discretized with
a sampling interval of 200 milliseconds when using
the NodeJS OPC UA and OPC DA path, and a sam-
pling interval of 1 second when using the OPC UA
tunneller path. The model used the parameters de-
fined in Table 1. Figures 6 and 7 show the response
of the three tank levels and input flow rates using the
NodeJS OPC UA and OPC DA path and the path with
OPC UA tunneller. Due to its smaller control interval
of 200 milliseconds, the former controller provides a
faster response.
7.2 Experimental Results of Fault
Detection and Diagnosis System
The testing of the fault detection and diagnosis sys-
tem was conducted using the same system as for test-
ing MPC, additionally including a Wireless Arduino
MK WiFi 1010 device and a Raspberry Pi 3 Model
B+ device. The mA data for the surface heights h
1
, h
3
and h
2
were calibrated so that they showed the correct
millimeter value at the top and bottom of the tank with
an accuracy of about a millimeter. Pump 1 and Pump
2 were calibrated with 1% percent interval to obtain
an exact calibrated equation for the pumps. This was
done for both pumps. In addition, with the help of
the collected data, the α
i j
parameters were accurately
identified. The validation between digital twin and
data is shown in Fig. 8. The parameters are show in
Table 2. In the first test, the delay was measured
by measuring how long it takes to read and write the
measurement value to the cloud. Test results show
0 1000 2000 3000 4000 5000 6000 7000 8000
t[seconds]
0
0.5
h
1
simulation
measurement
0 1000 2000 3000 4000 5000 6000 7000 8000
t[seconds]
0
0.1
0.2
h
3
0 1000 2000 3000 4000 5000 6000 7000 8000
t[seconds]
0
0.2
0.4
h
2
simulation
measurement
Figure 8: Accurate calibration of three tank system.
that the delay is 409 milliseconds when using OPC
UA tunneller software. When reading data utilizing
the Arduino MK WiFi 1010, the delay is 36 millisec-
onds. The delay is only 22 milliseconds when the
Gateway pc reads data through the C++ OPC DA and
NodeJS combination. In the second test, the signal
path is tested with the three-tank system with the par-
ity equations with transfer functions implemented in
the cloud. The Gateway PC read the values utiliz-
ing a combination of C++ OPC DA and NodeJS and
wrote them to the cloud service. The set point values
of 0.4 and 0.2 were set for level 1 and level 2, respec-
tively. Test results show that the digital twin detects a
fault in 56 seconds. To conclude, OPC DA no longer
meets current safety standards, however by combin-
ing it with OPC UA, an optimized and safe signal path
even for the latest Windows version is achieved.
8 CONCLUSIONS
OPC DA has not been updated earlier to function with
the latest programming libraries and operating sys-
tems, which significantly reduced the performance of
automation systems. The developed optimized signal
path using C++ OPC DA and NodeJS was compared
Table 2: Accurate model of the faulty pumps.
Variable Value
U
Signal1
0 −100
U
Signal2
0 −100
a
1
−32.41
b
1
1.475
a
2
−33.34
b
2
1.440
U
P
ump1 a
1
+ b
1
∗U
Signal1
U
P
ump2 a
2
+ b
2
∗U
Signal2
f low1 1.0 ∗10e −6 ∗U
Pump1
∗0.1
f low2 1.0 ∗10e −6 ∗U
Pump2
∗0.1
A Study on Optimizing Signal Path in Model Predictive Control and Fault Detection System of Three-Tank Pilot System Using Reference
Architecture
357
0 500 1000 1500 2000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Figure 9: Fault in the pump 1 and pump 2 in the closed loop
three-tank system.
to the OPC UA tunneler implementation through ex-
periments conducted on a real three-tank pilot system.
Due to the optimized signal path, the control interval
of MPC is 5 times smaller, resulting in a faster re-
sponse from the controller. In fault diagnosis and de-
tection, the delay is only 22 milliseconds compared to
408 milliseconds when using OPC UA tunneller soft-
ware. Test results show that the fault detection system
detects a fault in 56 seconds.
ACKNOWLEDGEMENTS
Pumps calibration was implemented by Otacilio Bez-
erra Leite Neto.
This work has received funding from the Eu-
ropean Union’s Horizon Europe research and in-
novation programme under grant agreement No.
101057083 – Zero-SWARM.
REFERENCES
Alhassan Osman, T. K. and Arıcı, M. (2023). Robust adap-
tive control of a quadruple tank process with sliding
mode and pole placement control strategies. IETE
Journal of Research, 69(5):2412–2425.
Bonomi, F., Milito, R., Zhu, J., and Addepalli, S. (2012).
Fog computing and its role in the internet of things. In
MCC ’12: Proceedings of the first edition of the MCC
workshop on Mobile cloud computing, pages 13–16.
Denzler, P., Ashjaei, M., Fr
¨
uhwirth, T., Ebirim, V. N., and
Kastner, W. (2022). Concurrent opc ua information
model access, enabling real-time opc ua pubsub. In
2022 IEEE 27th International Conference on Emerg-
ing Technologies and Factory Automation (ETFA).
DIN (2016). Din spec 91345:2016-04, reference architec-
ture model industrie 4.0 (rami4.0). Technical report.
European Commission (2017). Digital transformation mon-
itor. Technical report. Accessed 5 December 2022.
Evensen, L. (2013). Why a reference architecture is impor-
tant for you. Technical report. Accessed 5 December
2022.
Ghazali, M. R., A. M. A. . R. I. R. M. T. (2019). Adap-
tive safe experimentation dynamics for data-driven
neuroendocrine-pid control of mimo systems. IETE
Journal of Research, 68(3):1611–1624.
Govind, K. R. A., Mahapatra, S., and Mahapatro, S. R.
(2023). Design of an optimal control strategy for cou-
pled tank systems using nonlinear constraint optimiza-
tion with kharitonov-hurwitz stability analysis. IEEE
Access, 11:72618–72629.
Großmann, D., Bregulla, M., Banerjee, S., Schulz, D., and
Braun, R. (2014). Opc ua server aggregation - the
foundation for an internet of portals. In Proceedings
of the 2014 IEEE Emerging Technology and Factory
Automation (ETFA).
IEC (2015). Factory of the future. Technical report. Ac-
cessed 5 December 2022.
IEEE (2022). Systems and software engineering – archi-
tecture description. Technical report. Accessed 5 De-
cember 2022.
Industrial Internet Consortium (2019). The industrial in-
ternet of things volume g1: Reference architecture.
Technical report.
Isermann, R. (2006). Fault-Diagnosis Systems, An In-
troduction from Fault Detection to Fault Tolerance.
Springer, Berlin.
Kortela, J. (2022). Model-predictive control for the three-
tank system utilizing an industrial automation system.
ACS Omega, 7(22):18605–18611.
Maciejowski, J. M. (2002). Predictive Control with Con-
straints, 1st ed. Prentice Hal, Harlow.
M
¨
uller, A., Schnieders, T., Storms, S., and Herfs, W. (2022).
Integration method of custom information models into
existing opc ua servers. In 2022 IEEE 27th Interna-
tional Conference on Emerging Technologies and Fac-
tory Automation (ETFA).
Reiswich, E. and Fay, A. (2012). Strategy for the amend-
ment of plant information models by means of opc ua.
In IEEE 10th International Conference on Industrial
Informatics.
Samuel Emebu, Marek Kubal
ˇ
c
´
ık, C. J. B. D. J. (2023).
A comparative study of linear and nonlinear optimal
control of a three-tank system. ISA Transactions,
132:419–427.
Ujjwal Manikya Nath, C. D. and Mudi, R. K. (2023). Re-
view on imc-based pid controller design approach
with experimental validations. IETE Journal of Re-
search, 69(3):1640–1660.
VDI Verein Deutscher Ingenieure e.V. (2015). Reference
architecture model industrie 4.0 (rami4.0). Technical
report. Accessed 5 December 2022.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
358
