
autoWT: A Semi-Automated ML-Based Movement Tracking System for
Performance Tracking and Analysis in Olympic Weightlifting
Gatis Jurk
¯
ans, Anikó Ekárt
a
and Ulysses Bernardet
b
Aston University, Aston Triangle, Birmingham, U.K.
Keywords:
Olympic Weightlifting, Human Action Recognition, AI Sport Coaching, Video Sports Analysis, Long Term
Performance Tracking.
Abstract:
As part of AI Coaching Assistant project research in sports performance tracking systems, we present autoWT,
a novel semi-automated computer vision tracking system designed and developed for repeated long-term per-
formance tracking of Olympic Weightlifting (OW) training. The system integrates multiple cameras and a
heart rate sensor to capture, detect, and analyse OW movements, providing coaches and athletes with objective
performance metrics. Key features include automated lift detection, clip extraction, and acquired performance
metric visualisation based on markerless pose estimation data. The system architecture, consisting of a dis-
tributed system with multiple workers and a controller, enables efficient processing of high-bandwidth data
streams. The paper provides an overall system architecture, operating principles and a detailed breakdown
of action onset recognition and performance metric extraction system modules. We evaluate the system’s lift
detection accuracy and the repeatability of extracted performance metrics using data from Olympic lifts. Re-
sults demonstrate high accuracy in lift detection and consistent and repeatable metric extraction, indicating
autoWT’s potential as a valuable tool for conducting long-term Olympic weightlifting performance analysis
studies and as an aid for coaching. The autoWT system can enhance the broader perspective and be an exem-
plary model for designing tracking systems in other sports.
1 INTRODUCTION
Significant progression in many sports disciplines,
such as golf, shot put, or Olympic weightlifting, de-
pends on gradual improvements of technical profi-
ciency in a few complex dynamic movements.
Tracking and analysing these changes is tradition-
ally the task of an experienced coach, who has spent
years participating in, observing, and correcting these
movements.
The AI Coaching Assistant (ACA) project aims
to provide access to accurate tracking of long-term
performance changes based on quantifiable and ob-
jective metrics using state-of-the-art computer vision
and machine learning techniques.
Here, we present the auto Weightlifting Tracker
(autoWT), a semi-automated long-term performance
tracking system developed to support Olympic
weightlifting training.
We have selected Olympic weightlifting (snatch
and clean & jerk) movements because they are essen-
a
https://orcid.org/0000-0001-6967-5397
b
https://orcid.org/0000-0003-4659-3035
tial to strength and conditioning training in numerous
sports disciplines such as judo, rugby, track and field,
and CrossFit.
Olympic lifts are considered highly efficient for
power development. However, these movements are
often difficult to introduce into strength and condi-
tioning programs due to their flat learning curve for
acquiring movement efficiency. One challenge is that
the core metric—weight on the barbell—can not di-
rectly inform about technical movement changes.
OW is well suited for long-term, high-resolution
performance tracking, as the training process is spa-
tially confined to being executed on weightlifting
platforms. Multiple cameras can be permanently in-
stalled to capture the training. Our contribution pro-
poses a novel system architecture and features that en-
able automated Olympic lift detection and annotated
clip extraction for repeated data collection in long-
term performance tracking studies.
To achieve the aforementioned functionality, the
system needs to include the following features:
• To develop performance forecasting models in-
tegrating a combination of sensors, the system
60
Jurk
¯
ans, G., Ekárt, A. and Bernardet, U.
autoWT: A Semi-Automated ML-Based Movement Tracking System for Performance Tracking and Analysis in Olympic Weightlifting.
DOI: 10.5220/0012997400003828
In Proceedings of the 12th International Conference on Sport Sciences Research and Technology Suppor t (icSPORTS 2024), pages 60-71
ISBN: 978-989-758-719-1; ISSN: 2184-3201
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

requires continuous and synchronised recording
from multiple sensors such as cameras, heart rate
monitors, accelerometers, and positional trans-
ducers.
• We needed to develop a key action detection sys-
tem to improve computational efficiency by re-
ducing markerless pose model use and minimise
coaches’ need to curate individual Olympic lift
clips.
• Ability to log supplementary data (exercise type,
set/repetition count, used weight, additional com-
mentary) – This data allows for easy annotation of
the captured data of the extracted clips.
• System and metric data visualisation – Provides
easy access to the system status and the ability
to provide feedback using metrics extracted from
Olympic lifts.
• System checks to ensure rigorous and repeatable
data capture.
We will begin by reviewing related work in perfor-
mance analysis technologies for barbell sports. Sub-
sequently, we describe the system requirements, fea-
tures, and architecture of autoWT. We will conclude
with a description of the numeric evaluation of the
system in terms of accuracy and repeatability.
2 RELATED WORK
2.1 Olympic Weightlifting
OW consists of two movements: snatch and clean &
jerk. In both, a loaded barbell is lifted to the above-
head position in one or two steps, and then the compe-
tition winner is awarded to the athlete with the high-
est combined weight. This study will refer to snatch
and clean & jerk as Olympic lifts (see Figure 1) and
any strength or bodybuilding movements trained us-
ing free weights or a barbell (barbell squats, bench
press, clean pull, etc.) as assistance lifts.
2.2 Barpath Tracking in Olympic
Weightlifting
The use of cameras for OW movement analysis goes
back to the 1960s and 1970s when OW was a highly
contested Olympic discipline during the Cold War era
(Garhammer and Newton, 2013). This period estab-
lished bar-path tracking as the preferred tool used
by researchers interested in comparing the perfor-
mance of Olympic lifts (AN, 1978). More recently
improved bar tracking algorithms have been devel-
oped (Hsu et al., 2018), (Hsu et al., 2019), and there
are now consumer-level tools such as BarSense, WL-
Analysis, Dartfish and others that provide bar track-
ing. One of the first examples of a system to aid
coaching in OW beyond bar-path tracking was im-
plemented by (cha, ) for extraction of 3D bar-path
and performance metrics (barbell tilt and knee flex-
ion angle) using depth data - Kinect cameras. While
bar tracking is helpful, with the rapid advancement of
computer vision and related computer science fields,
many more tools and approaches have become avail-
able for extracting useful information from video data
of human movement.
2.3 Action Recognition of Olympic Lifts
To perform long-term tracking of Olympic lifts using
camera sensors, they must first be identified within
the video stream data; this aim fits in the Human Ac-
tion Recognition (HAR) sub-field of computer sci-
ence. (Host and Ivaši
´
c-Kos, 2022) define categories
for HAR in sports, according to which Olympic lifts
are Individual Complex Actions - a combination of
simple actions and interactions with an object. A pop-
ular method for detecting periodic activities, includ-
ing exercise, is RepNet (Destro, 2024), which could
be used for the repetition segmentation of assistance
lifts like the squat and overhead press, yet for the
detection of Olympic lifts, this is not applicable as
the lifts are usually performed in sets ranging from 1
to 3 repetitions with each repetition usually intermit-
tent by a pause between lifts. An Olympic lift on-
set detection method was developed by (Yoshikawa
et al., 2010) using Cubic Higher-Order Local Auto-
Correlation, which is a feature extraction method
that captures complex spatial relationships comput-
ing third-order auto-correlation values of pixel val-
ues within a local neighbourhood. A strong feature
of this method is the ability to detect the onset regard-
less of the different capture angles of the lifts. There
are also convolutional neural network (CNN) based
approaches using deep key-frame detection - detect-
ing and extracting key positions of Olympic lifts from
lift recordings (Jian et al., 2019), (Pan, 2022), (He
et al., 2023). These methods are not applied for ac-
tion recognition or lift onset detection but could be
suited for these applications. The limiting factors for
pure CNN-based systems are the high computational
system requirements for data processing and the prob-
abilistic nature of the key frame detection - delivering
several frames associated with the same key position
at high frame rates.
autoWT: A Semi-Automated ML-Based Movement Tracking System for Performance Tracking and Analysis in Olympic Weightlifting
61
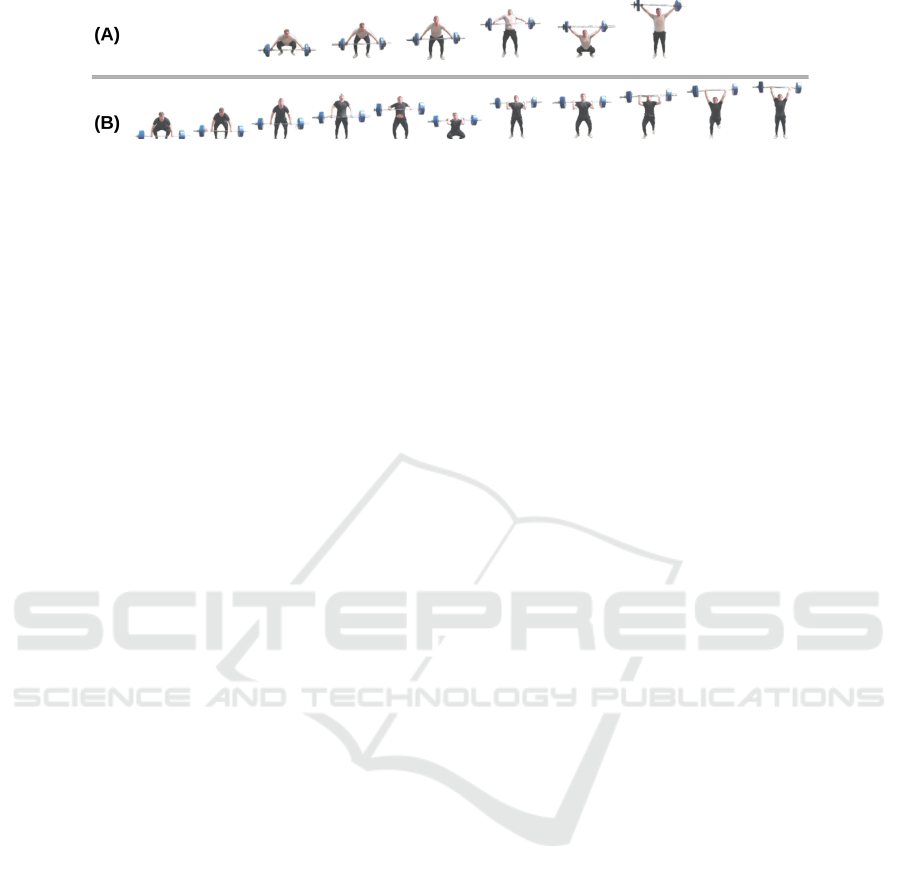
Figure 1: Examples of Olympic lifts. A - Snatch lift. B - Clean & Jerk lift.
2.4 Modern Computer Vision Use for
Barbell Sports Performance
Analysis
Olympic lifts are challenging to analyse due to their
fast pace and highly technical nature. Currently, only
two publications suggest technique adjustment and
analysis methods for Olympic lifts using computer vi-
sion (Rethinam et al., 2023),(Bolarinwa et al., 2023).
Markerless pose detection (MPD) is a core technol-
ogy used in both papers. MPD enables the extraction
of landmark locations of the body pose directly from
image data. Several models are available; we use
Google’s - BlazePose (full-heavy) model implemen-
tation due to its reduced computational demand as be-
ing designed for application in mobile devices while
delivering high pose estimation accuracy (Bazarevsky
et al., 2020). MPD has shown reliable retrieval of
body landmark data, the caveat being that there is a
potential landmark offset compared to marker-based
solutions and errors due to occlusion of body parts
(Needham et al., 2021) (Mroz et al., 2021). (Rethi-
nam et al., 2023) propose MPD data for an algorithm
that calculates the athletes’ centre of gravity extracted
from their body proportions. This approach suggests
that the algorithm can be used to determine the stabil-
ity of the base (foot placement) for the athlete execut-
ing clean & jerk movement. (Bolarinwa et al., 2023)
developed a system improving the refereeing process
to reduce human bias in judging successful and failed
attempts in OW. First, by recognising recovery parts
of snatch and clean & jerk movements, a neural net-
work classifies lifts as complete or incomplete. Then,
MPD is used for lift analysis to determine common
technique breakdowns, such as the press-out rule.
Several studies suggest MPD use to correct the
technique of assistance lifts outside of OW applica-
tions, as they are technically much simpler and pe-
riodic. A good example is (Lin and Jian, 2022),
where an algorithm was developed for assisting dead-
lift form correction.
(Arandjelovi
´
c, 2017) did not use MPD, but devel-
oped an entire “monitoring-assessment-adjustment”
loop for powerlifting exercises - squat and bench
press, which allows for analysis and performance
forecasting based on simulation and personalised ath-
lete profiles.
Olympic weightlifting has a long history of using
camera-based data analysis for performance tracking,
which had historically been accessible only to sports
scientists exploring the biomechanics of Olympic
lifts. The last two decades of rapid developments
in computer vision and machine learning have built
algorithms that now can give greater access to pose
data estimation directly from video footage. Some
work has been shown to utilize these tools for real-
time adjustment of simple periodic assistance lifts and
for judging technical aspects of individual executed
Olympic lifts. Based on our literature review, we have
identified a gap in research for building an automated
system for repeated long-term performance tracking
in OW, integrating lift detection, performance metric
extraction and feedback.
3 ARCHITECTURE
In this section, we will highlight the key features and
introduce the overall selected system architecture. We
will then describe in depth the two core modules, the
Lift Detector and Metric Extractor.
3.1 autoWT Features
The features selected and implemented as part of au-
toWT aim to serve the goals of the AI Coaching As-
sistant project - to improve the coaching experience
through long-term tracking of athletes using computer
vision and machine learning. autoWT enables long-
term data collection studies to develop performance
forecasting models using markerless pose estimation
data. Such research studies require long-term data
collection, where athletes need to use the system to
record their training sessions repeatedly throughout
whole training blocks. This is achieved by easing
the integration of autoWT as part of existing training
practices; we selected features that enable data col-
lection and provide benefits to the training process,
encouraging the system’s use.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
62
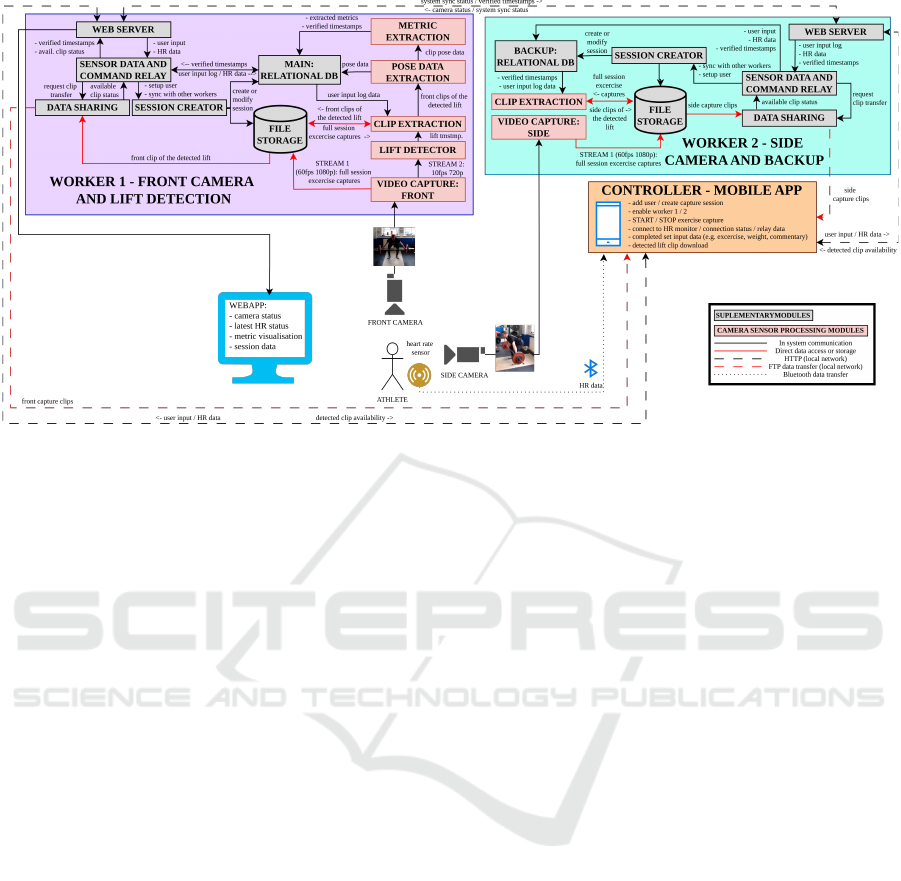
Figure 2: Auto weightlifting tracker architecture.
3.1.1 Multi Camera Capture with Detected
Olympic Lift Extraction
Camera use for performance analysis and review is a
common practice in OW. Yet, it is often left out as the
production of individual clips and their annotation is
time-consuming and labour-intensive. AutoWT auto-
mates lift detection and clip extraction with easy ac-
cess to the user. By providing this sought-out feature,
we enable coaches and athletes to direct more focus
on training. The extracted clips are also annotated
with a unique identifier number and weight used on
the barbell, extracted from the user-logged data.
3.1.2 User Data Logging and Visualisation
Besides lift data accessible through the controller ap-
plication, autoWT worker systems serve a WebApp
displayed on a large screen during system use. The
WebApp gives easy access to system information:
camera capture status, detected lift performance met-
ric visualisations, latest heart rate sensor readings,
and tabulated user-logged data. The ability to quickly
see the progression of the current training session in a
singular overview encourages the logging of the train-
ing session data.
3.1.3 Multi Sensor Data Capture
Currently, autoWT allows for camera and heart rate
sensor data capture. The system enables the setting
of heart rate warning thresholds. When the user’s
heart rate is above the threshold, visual cues flag this
change by increasing the font and changing the colour
of the displayed heart rate readings. This data can en-
able a simple method for tracking athletes’ exertion
levels and inform rest time selection. This data col-
lection supports future research exploring athlete fa-
tigue level forecasting based on combined heart rate
tracking and performance metric data.
3.2 autoWT System Procedure
Before the system’s first use, the controller system
and the workers are set up on the same local network,
the cameras are positioned in permanent static loca-
tions, and markers are set on the weightlifting plat-
form to indicate the setup starting position when lift-
ing.
The worker systems are first powered on when
using the system, which starts a series of automated
scripts enabling autoWT software. Then, when the
controller app is opened, it waits to receive synchro-
nising checks from the worker systems. Once work-
ers are available, the controller app enables the ini-
tialisation of a user using the Session Creator module
to create new storage locations and database entries
associated with a new training session in all worker
systems.
After initialisation, athletes can start using cam-
eras and the heart rate sensor - these sensors can be
used simultaneously or independently. As soon as the
user enables the heart rate sensor on the controller
app, the sensor data starts streaming to workers and
appears for display on the WebApp.
The software is designed to automate the exercise
capture and analysis, so when capturing an exercise,
autoWT: A Semi-Automated ML-Based Movement Tracking System for Performance Tracking and Analysis in Olympic Weightlifting
63

the athlete only needs to start and stop capturing when
changing to a new exercise. To start camera capture,
the user selects the intended exercise from a list on the
controller app. Depending on the exercise selection,
different autoWT features will be enabled. If Olympic
lifts are selected, worker modules associated with lift
detection and metric extraction will be enabled. Af-
ter exercise selection and pressing the “start capture”
button, worker systems are notified to start recording
using the front and side cameras simultaneously.
When recording Olympic lifts, detected and ex-
tracted clips populate the available clips table on the
controller app, which, upon selection, can be down-
loaded to the device. Additionally, if the Snatch
movement is being recorded, the metric extraction
system generates the Snatch Pull Height (SPH) met-
ric, visualised on the WebApp.
During the capture, the athlete can log informa-
tion about completed sets - set/repetitions count and
additional commentary on execution. Each time a
new set is added, the information appears on the We-
bApp in a tabulated format. Every 5 seconds, the
WebApp updates newly added sets or calculated met-
rics available from the previously executed sets. Once
the athlete has completed the exercise, they press the
“stop capture” button, notifying termination of exer-
cise capture; once the lift processing modules com-
plete any outstanding tasks, they stop until a new ex-
ercise recording commences, repeating the process.
3.3 System Design Considerations and
Architecture Selection
To implement the functionality described, the system
requirements include:
• Concurrently process multiple sensor data
streams, such as capturing and encoding multiple
high-bandwidth video streams and timestamped
physiology data, including heart rate sensor data.
• The system needs to be enabled by single-
board computers rather than GPU-enabled, high-
powered PC systems.
• System needs to be accessible via low-
specification devices.
• Function effectively with unreliable external net-
work access.
Given these requirements, a distributed architecture
was selected because it can handle high-bandwidth
data processing through parallel processing, support
low-specification control devices by offloading inten-
sive tasks to distributed workers, and operate effec-
tively without consistent network access. autoWT
comprises two worker sub-systems that handle the
processing for camera sensor data combined with
a single controller system (MobileApp) that coordi-
nates activities and relays data for a heart rate monitor
sensor. Each worker sub-system comprises modules
covering different system functions divided into core
and sensor processing modules. The overall system
architecture and the interactions between sub-systems
and their specific modules can be seen in Figure 2.
3.3.1 Worker Sub-System - Core Modules
Core modules are crucial for integrating the worker
sub-systems into the autoWT system. The current au-
toWT core modules include the Web Server, which
enables communication between systems through the
local network using the HTTP protocol and can host
a WebApp to display system status information. An-
other module is the Sensor/Command Relay, which
processes command packets received from the Web
Server and forwards them to the relevant sub-system
modules. Additionally, there is the Data Sharing mod-
ule, which controls an FTP server to transmit ex-
tracted Olympic lift video clips to the MobileApp
(controller). Finally, the Session Creator module
manages the creation and administration of the ongo-
ing session, including file storage and database setup.
3.3.2 Worker Sub-System - Sensor Processing
Modules
The sensor processing modules - capture, process,
and analyze sensor data, specifically camera sensor
data. The video capture module manages the cap-
ture and storage of multiple video streams. Mean-
while, the Lift Detector module (Worker 1) uses a
low-framerate video stream to detect Olympic lift
start and end onset timestamps, with a more detailed
description in the Lift Detector section. Following
this, the Clip Extraction module (Worker 1) gener-
ates individual annotated clips from the stored high-
framerate stream data using detected onsets and user-
logged data. Then, the Pose Data Extraction mod-
ule (Worker 1) applies the markerless pose model
to extracted clips and stores the pose in the rela-
tional database. Finally, the Metric Extraction mod-
ule (Worker 1) extracts performance metrics for visu-
alisation by the WebApp - more details in the Metric
Extractor section.
3.4 Lift Detector Module
The Lift Detector is the module that detects the start
and end of Olympic lift movements from a low-
framerate video stream. It can currently detect snatch
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
64
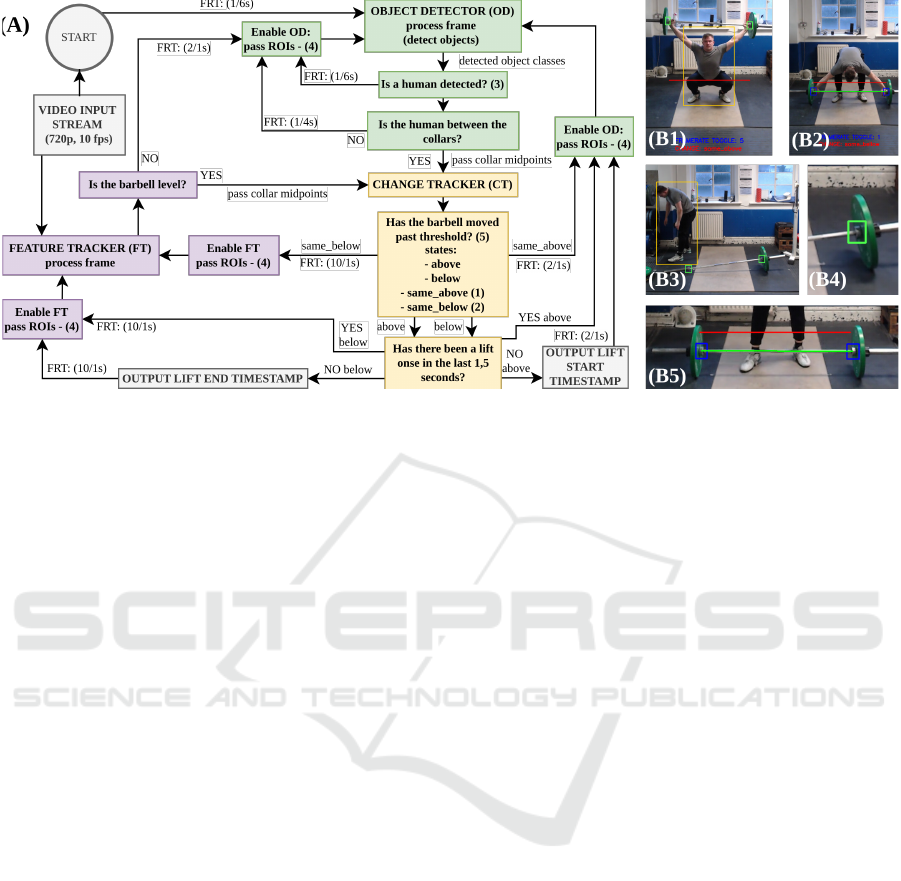
Figure 3: Lift Detector module state diagram. (A) The state diagram shows the interaction between three parts: the Feature
Tracker (FT), Object Detector (OD), and Change Tracker (CT). FRT - Framerate toggle indicates an adjustment to the input
framerate for the OD and the FT, e.g. (1/6s) (1 frame per 6 seconds). (B) A series of images detailing parts of the state
diagram. (B1) Lift detector output during the "same_above" state. (B2) Output during the "same_below" state; (B3) is an
example of output when a human is detected in the frame but not between the barbell collars; (B4) Example of a barbell
collar Region of interest (ROI), identified by the object detector. (B5) ROIs tracked by the feature tracker; the red line is the
threshold line, and the green line is the barbell identified by the midpoints of the barbell collar ROIs.
and clean & jerk movement onsets with high accuracy
(see Evaluation - Lift Detector Testing). The "Change
Tracker” component of the Lift Detector tracks the
barbell’s position around a threshold line, set based
on readings of the barbell’s location while stationary
on the floor (Figure 3). Depending on whether the
barbell is detected above or below the threshold and
whether a person is detected in the frame or between
the barbell collars, the system switches between the
“Object Detector” and the "Feature Tracker”. This
design enables efficient lift onset detection with opti-
mised system resource use.
3.4.1 Change Tracker
The Change Tracker is the go-between the Object
Detector and the Feature Tracker, keeping track of
the state changes of the overall lift detector module.
There are four states in the system:
• above —- the barbell just moved past the thresh-
old line, triggering the lift start onset detection;
• same_above —- the barbell continues to be above
the threshold;
• below—the barbell just moved below the thresh-
old line, triggering the lift end onset detection;
• same_below —- the barbell continues to be below
the threshold line.
In addition to tracking the lift detector state, the
change tracker employs additional checks for im-
proved performance. First, to reduce false positive
consecutive onset detections due to the barbell being
thrown on the ground and bouncing off the floor past
the threshold line, the change tracker checks if an on-
set has been detected in the last 1.5 seconds. Second,
the change tracker adjusts the height of the threshold
line above the barbell based on the last 400 readings
while the barbell is level on the floor.
3.4.2 Object Detector
The Object Detector is a fine-tuned Region-based
Convolutional Neural Network (R-CNN) trained on
a set of 1400 images of Olympic lifts. The images
were manually annotated with two classes of objects:
Collars and Humans. Collars are the inner part of the
weightlifting barbell (see Figure 3(B4) - example for
region of interest of the barbell inner collar). When
both humans and collars are detected in the frame,
additional checks are performed to ensure the correct
object detection, such as checking if the person is de-
tected between the collars at the same height in the
image frame. Then, if the barbell is below the change
threshold line and the additional checks are passed,
the system switches to the Feature Tracker. Depend-
ing on the Lift Detector’s overall state, the Object De-
tector will read the input frames at a rate between 1
frame every 6 seconds to 2 frames every second. This
low frame rate is due to the high system performance
needs of the R-CNN, which is why we use it in com-
autoWT: A Semi-Automated ML-Based Movement Tracking System for Performance Tracking and Analysis in Olympic Weightlifting
65

bination with a more traditional Feature Tracker sys-
tem.
3.4.3 Feature Tracker
Once the Object Detector passes the barbell collar
ROIs, the Feature Tracker acquires the stream, track-
ing each ROI at an increased frame rate of 10 frames
per second. The Channel and Spatial Reliability
Tracking feature tracker allows for efficient barbell
tracking but is prone to drift when a single side of the
barbell is moved, creating partial occlusion, or when
the barbell is accelerating very rapidly, creating mo-
tion blur and, therefore, losing features being tracked.
To avoid drift, the feature tracker checks that the bar-
bell is level and switches to the object detector when
the barbell is uneven. To prevent the feature tracker
from losing collars due to barbell acceleration, we
only use the feature tracker up to the threshold line,
past which the object detector is used. This works be-
cause the mechanics of the Olympic lifts have a slow
initial acceleration pattern from the floor; the barbell
never moves fast enough in this region for the feature
tracker to lose tracking.
Figure 4: Snatch Pull height metric. Y-axis markerless pose
estimate data coordinates after filtering with SPH metric
key points added.
3.5 Metric Extraction Module
The Lift Detector identified onsets are used to ex-
tract high-framerate clips. Then, the Metric Extrac-
tion module uses markerless pose data extracted from
the clips to generate defined metrics. Following dis-
cussions with Olympic weightlifting coaching staff
supporting the AI Coaching Assistant project, several
metrics were identified as potentially helpful in track-
ing long-term performance. One such metric is snatch
pull height SPH, which is the distance that the barbell
travels between the start of the lift and the maximum
height the barbell reaches following the last pull of the
snatch (see Figure 4); the metric can identify snatch
lift performance efficiency when examined for maxi-
mal lifts. Additionally, we propose that SPH can help
effectively analyse athletes’ ability to adjust to weight
increases during multiple repetition sets. The follow-
ing is an example of an analytical approach for ex-
tracting the key points of interest from the markerless
pose data necessary to generate the snatch pull height
metric.
3.5.1 Extracting Key Points for Snatch Pull
Height Metric
To calculate the metric, we primarily use the y-axis
data for the wrist movement. First, the pose data is fil-
tered to remove high-frequency noise using a rolling
average filter with a window size of 10, which is 1/6th
of a second for a capture frame rate of 60fps. We find
two key points to calculate SPH: the start of the snatch
movement and the maximum pull height. The differ-
ences between these two points result in the SPH met-
ric (see Figure 4).
3.5.2 Finding Maximum Pull Height Point
To determine the maximum point where the wrist
reaches its peak height during a pull, we locate the
first local maximum peak in the upward movement of
the wrist along the y-axis that is greater than the av-
erage height of the wrist when the barbell is on the
floor, plus an additional 20%.
3.5.3 Finding Start Acceleration Point
The onsets provided by the lift detector give an ap-
proximate start and end position for the lift move-
ments. However, our identified key points must be
exact, as the start acceleration point is essential for
calculating many potential performance metrics. This
task is not trivial. We cannot simply use a single sig-
nal, e.g., y-axis points, for the wrist movement, as the
athlete’s body is not fully rigid; there is a slight off-
set for different body landmarks when the body starts
moving upwards before the barbell leaves the ground.
At the same time, just before the barbell starts accel-
erating from the floor, the athlete remains steady for
a fraction of a second as the force transfers into the
barbell before the combined system starts moving up-
wards. By comparing the y-axis movement across
multiple landmarks, we can find this steady period
and define the start acceleration point at the start of
this period using Algorithm 1. The algorithm initially
filters the pose data only to include the specified y-
axis signals from the beginning of the lift recording to
the maximum pull index. Then, for each signal, stan-
dard deviations over a rolling window are calculated,
and the mean of these deviations is used to calculate a
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
66

threshold value. Finally, to determine the start accel-
eration point, all the signals within the defined win-
dow are compared to the threshold; if the start and
end values are below the set threshold, a steady pe-
riod is identified. If a steady period is not found, the
window size is reduced, and the process is repeated.
As the steady period is a fraction of a second, we se-
lected the window size as 15 or below for our system.
Given that our system’s pose data is extracted from
recordings at 60fps, the window equals 15 frames or
less than a quarter of a second.
4 EVALUATION
A data collection study was conducted to provide
data, first, to develop and test the Lift Detector mod-
ule, and second, to test the extracted metric repeata-
bility across and within capture sessions using the in-
tegrated markerless pose model in the Metric Extrac-
tion module.
We captured full training sessions using the base
autoWT system of two cameras and a heart rate mon-
itor, capturing Olympic and assistance lifts. Follow-
ing each capture session, data was annotated manu-
ally, with individual start and end timestamps of each
executed Olympic lift and start and end timestamps
for executed set for assistance movements. Addition-
ally, user data was logged, including set, repetition
numbers, weight on the barbell, and additional coach
commentary. Data was collected using the following
hardware:
• Controller - MobileApp: Samsung Galaxy Tab 6A
(Android 8.1)
• Workers: 2 * (single board computers) - Jetson
Xavier NX (Ubuntu 22.04 JetPack)
• Cameras: 2 * (web cameras) - Logitech Streamc-
Cam
• Heart Rate Monitor: Polar H10
Eight athletes (7m,1f) participated in a total of 21
training sessions; each participant conducted between
1 to 6 full sessions, providing us with 381 snatch and
190 clean & jerk recordings. The following sections
explore insights gained from this data.
4.1 Lift Detector Testing
Apart from the data used to train the Object Detector
for the Lift Detector, out of the twenty-one sessions,
four full capture sessions, each featuring a different
athlete performing Olympic lifts, were set aside for
Input: Pose data D (all 33 y points),
Maximum pull height index M
Output: start_acc_point index
Initialize Parameters:
Define signals_of_interest: {s
1
, s
2
, . . . , s
m
} ⊆
{"wrist_y", "hip_y", "ankle_y", . . . };
Filter D to D
′
with signals of interest;
Truncate D
′
at M, resulting in D
′′
;
Let n be the number of data points in D
′′
;
Iterate over window sizes:
Define W = {15, 14, . . . , 5};
foreach window_size w ∈ W do
Calculate Tolerance:
foreach signal s ∈ {s
1
, s
2
, . . . , s
m
} do
Compute σ
t,s
over a rolling window
of size w for t ∈ {1, 2, . . . , n − w + 1}
in D
′′
;
Calculate mean standard deviation:
σ
w,s
=
1
n − w + 1
n−w+1
∑
t=1
σ
t,s
end
Calculate overall mean:
σ
w
=
1
m
∑
s∈{s
1
,s
2
,...,s
m
}
σ
w,s
Define tolerance τ =
σ
w
2
;
Check Moving Averages:
for i = n down to w do
if ∀s ∈
{s
1
, s
2
, . . . , s
m
},
D
′′
i,s
− D
′′
i−w,s
< τ
then
Set start_acc_point to i − w;
break;
end
end
if start_acc_point is set then
break;
end
end
Algorithm 1: Find start acceleration algorithm.
testing. This dataset comprises 4 hours and 23 min-
utes of complete recordings, with 268 manually an-
notated timestamps marking the start and end of each
lift.
4.1.1 Lift Detector Test Procedure
The ground truth timestamps were annotated to in-
clude the whole lift, with the start timestamp being
in an interval of ±2 seconds of the actual start of the
lift and the end being recorded as ±2 seconds of the
autoWT: A Semi-Automated ML-Based Movement Tracking System for Performance Tracking and Analysis in Olympic Weightlifting
67
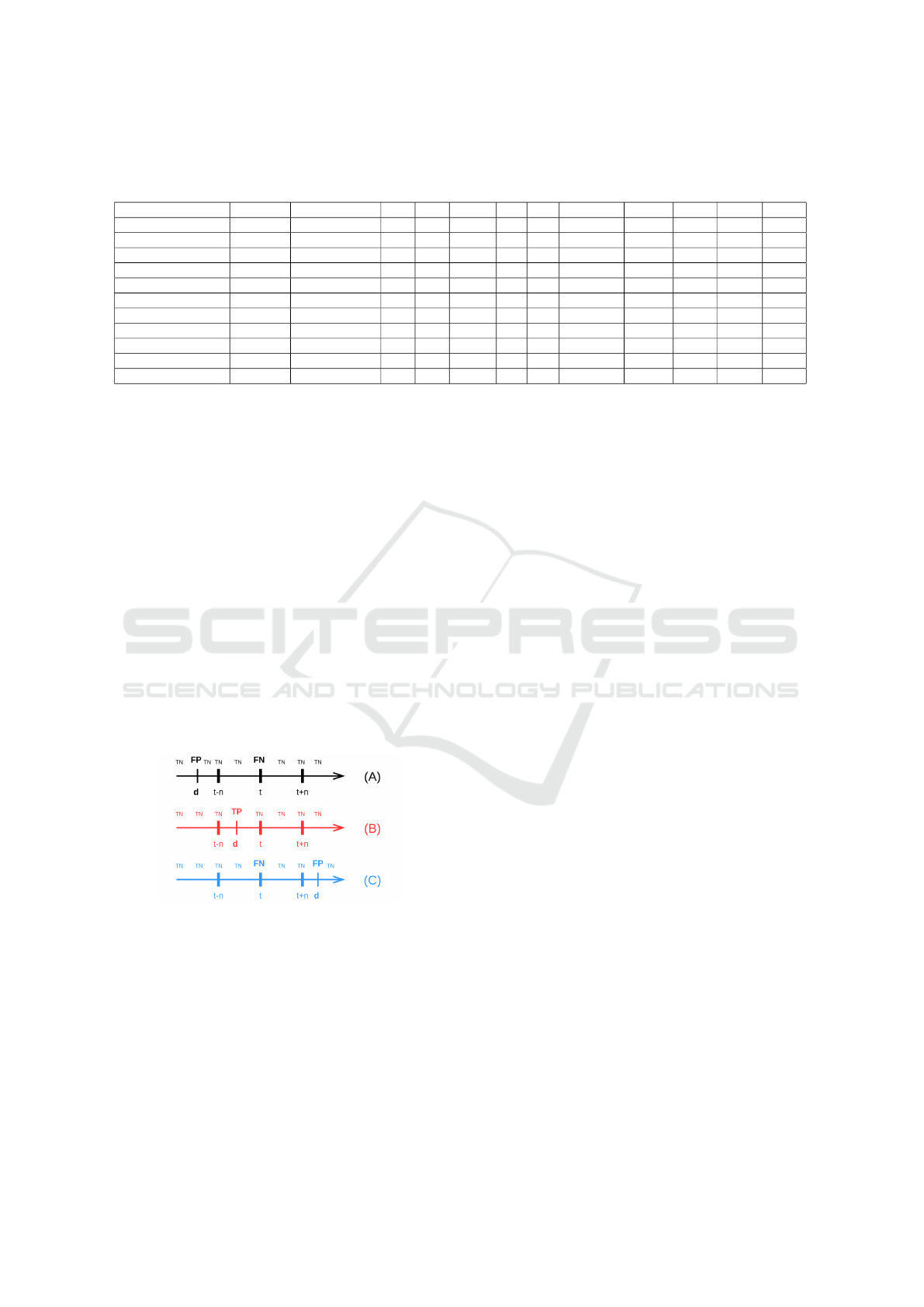
Table 1: Lift Detector Test Results. LD detections - total number of all detections by the Lift Detector. AP - Actual Pos-
itives, TP - True Positives, TN - True Negatives, FP - False Positives, FN - False Negatives, MCC - Matthew’s Correlation
Coefficient, JCC - Jaccard Coefficient.
Participant Exercise LD detections AP TP TN FP FN Precision Recall F1 MCC JCC
p1 cnj 27 28 27 1783 0 1 1.000 0.964 0.982 0.982 0.964
p1 snatch 70 68 60 1918 10 8 0.857 0.882 0.870 0.865 0.769
p14 cnj 24 22 22 2275 2 0 0.917 1.000 0.957 0.957 0.917
p14 snatch 42 40 37 2468 5 3 0.881 0.925 0.902 0.901 0.822
p6 cnj 21 26 21 1825 0 5 1.000 0.808 0.894 0.897 0.808
p6 snatch 33 40 30 2040 3 10 0.909 0.750 0.822 0.823 0.698
p9 cnj 23 20 17 1720 6 3 0.739 0.850 0.791 0.790 0.654
p9 snatch 24 24 23 1432 1 1 0.958 0.958 0.958 0.958 0.920
TOTAL_SNATCH snatch 169 172 150 7858 19 22 0.888 0.872 0.880 0.877 0.785
TOTAL_CNJ cnj 95 96 87 7603 8 9 0.916 0.906 0.911 0.910 0.837
TOTAL ALL 264 268 237 15461 27 31 0.898 0.884 0.891 0.889 0.803
barbell being dropped back on the floor. Yet the Lift
Detector detects onsets once the barbell moves past
a threshold above or below the barbell. We consider
that the detector detects an onset correctly if the cor-
rect type of onset (start or end) is detected within ±2
seconds of the annotated onset. We treat each record-
ing as a time series of length equal to the number of
seconds (assuming one frame/second). This means
that a recording of length N with an onset at moment
t and a time window around the onset from t − n to
t + n will have N data points;
• Time window within which we accept one posi-
tive data example: t − n....t + n
• Negative data examples: 0...t − n − 1 and t + n +
1...N
For each recording and the lift detector identifying an
onset at some moment d, we will have N data points
in time, as seen in Figure 5.
Figure 5: Lift detector onset detection. A - (d < t − n); B -
(t − n ≤ d ≤ t + n); C - (d > t + n).
The counting of the different categories for each
recording can be simplified:
i f t −n < d < t + n :
T N = N − 1, T P = 1, FP = 0, FN = 0
Otherwise :
T N = N − 2, T P = 0, FP = 1, FN = 1
4.1.2 Lift Detector Test Findings
We used five metrics to measure performance: pre-
cision, recall, F1 score, Matthew’s correlation coef-
ficient, and the Jaccard Coefficient. These metrics
mitigated the misleading effects of dataset imbalances
caused by the high number of True Negatives. It pro-
vided a more accurate assessment of the test’s per-
formance by focusing on both positive and negative
outcomes. Table 1 shows the breakdown of the re-
sults across individual participants in either snatch or
clean & jerk movements. The Lift Detector demon-
strates overall solid performance with total test values
across both Olympic lifts of 0.898 and 0.884 for pre-
cision and recall, 0.891 for the F1 score, 0.889 for
the MCC, and 0.803 for the Jaccard coefficient. The
values indicate that the implemented detector system
has balanced precision and recall, a strong correla-
tion between predicted and actual classifications, and
a significant overlap between predicted positives and
actual positives. This suggests that the Lift Detector
is highly effective at correctly identifying true posi-
tive cases, indicating lift onsets while maintaining a
low rate of false positives and negatives.
4.2 Metric Extractor Testing
The AutoWT system relies on integrating markerless
pose as a key technology enabling performance data
collection. The system is intended for long-term data
collection through repeated capture sessions. The un-
derlying measurement system—the markerless pose
model—must deliver repeatable measurements given
the same conditions, i.e., the same results are obtained
repeatedly under unchanged conditions. Additionally,
based on this repeatability assumption, the autoWT
system should be able to identify deviations in the ex-
tracted key point data if the camera setup has been
altered.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
68
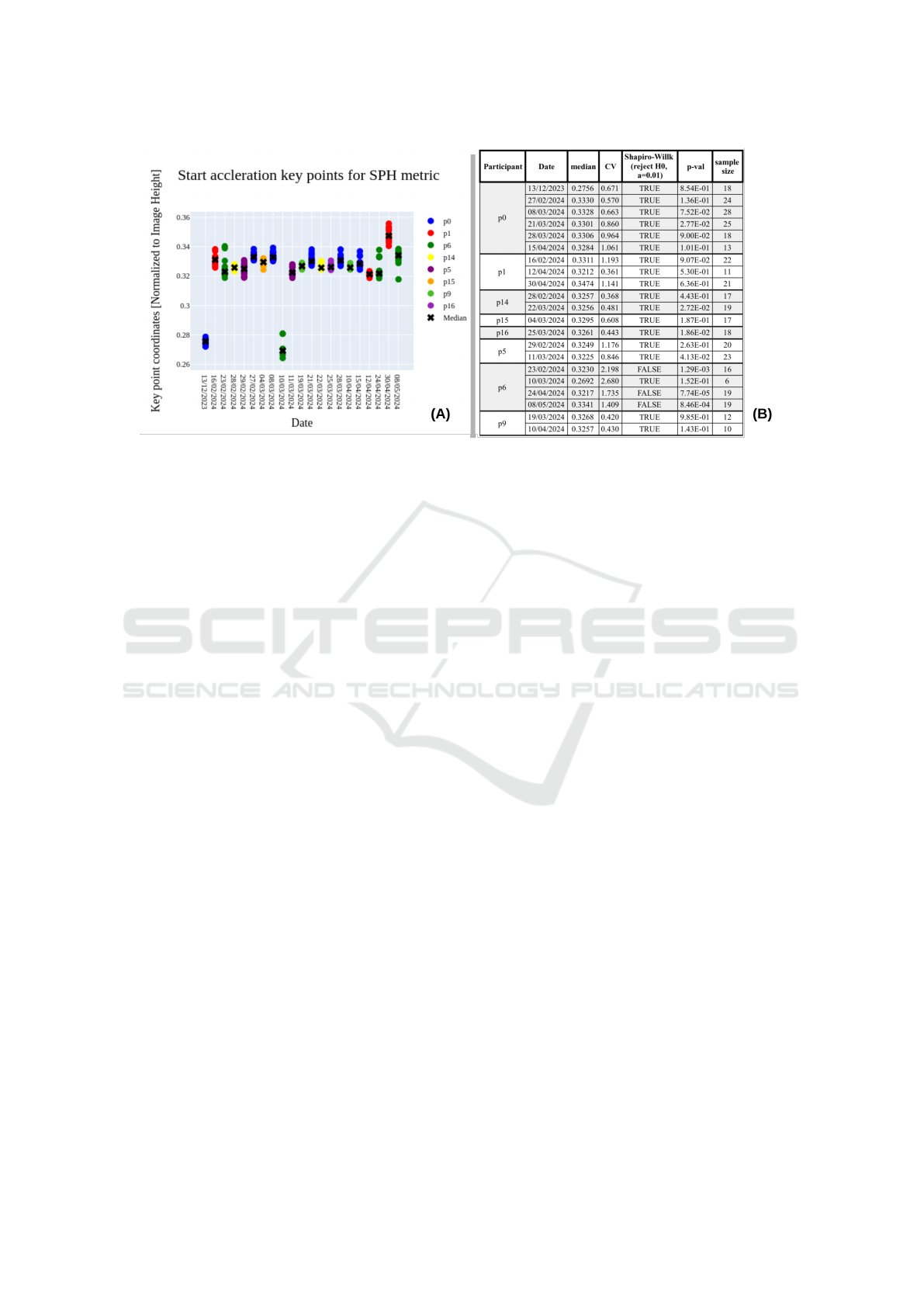
Figure 6: Start Acceleration key points across all capture sessions from the data collection study. A - graphic showing the
distributions of the key points in each capture session. B - Table showing each capture session: Each session data point
distribution median, CV - Coefficient of Variation, Shapiro-Wilk test results for distribution normality and sample size.
4.2.1 Start Acceleration Point Distribution and
Repeatability
We will examine the start acceleration key points to
test the data repeatability. Given that the front camera
has not been moved, the key point we extract for the
same participant across capture sessions should de-
liver the same y-axis landmark data within a normal
distribution.
We use the Shapiro-Wilk test to determine the
normality of the start acceleration point distributions
for each capture session. Before testing, extreme
outliers—values greater than three standard devia-
tions—were removed (5/384 key points). The test
results show that 18 of the 21 sessions tested were
Gaussian. The test results can be seen in Figure 6 - B.
After testing that the distributions are normal, we
can compare the distributions of points using central
tendency measures, such as the median, and variance
measures, such as the coefficient of variation.
To highlight other indications of the data repeata-
bility, we draw attention to a few additional notes. As
this data is based on the wrist point detections from
the markerless pose model, they are slightly different
for each athlete. Yet we can observe that the median
of the data and the spread are similar for participants
who have multiple sessions (e.g., p0, p5, p14). This
can also be seen when looking at the coefficients of
variation in Figure 6 - B and the shapes of the distri-
butions in Figure 6 - A.
4.2.2 Detecting Camera Offset Using Start
Acceleration Points
We know the front camera used for data collection
was not moved during the captured sessions. There-
fore, we expect the wrist points to lie within a normal
distribution for each captured training session, which
we have shown for most sessions.
When setting up the autoWT system for data col-
lection, the weightlifting gym staff and regular mem-
bers were instructed not to alter the setup. However,
the cameras were adjusted during the data capture
study period due to space restrictions - the front cam-
era was near a weight stand and was moved by acci-
dent. As the camera mounts are static, they can only
be moved up, down, or side to side. This should be
noticeable in the data as an offset for the session fol-
lowing the alteration.
By reviewing the session key point distributions
and their median values in Figure 6 - A, we can see
that the camera was moved three times during the
study period: following the first session on 13/12/23,
then following the sessions on 8/3/24 and 24/04/24,
respectively. Each time following a session, when the
camera was tilted, it was subsequently readjusted, but
the newly adjusted height did not match exactly with
the previous viewing angle.
Even when accounting for slight variations in the
athlete’s setup position before the lift, we found that
the captured key points are normally distributed and
can be acquired with high repeatability across re-
peated capture sessions. Lastly, we observed that de-
viations for the median of the start acceleration point
distributions can be used to determine if the camera
autoWT: A Semi-Automated ML-Based Movement Tracking System for Performance Tracking and Analysis in Olympic Weightlifting
69
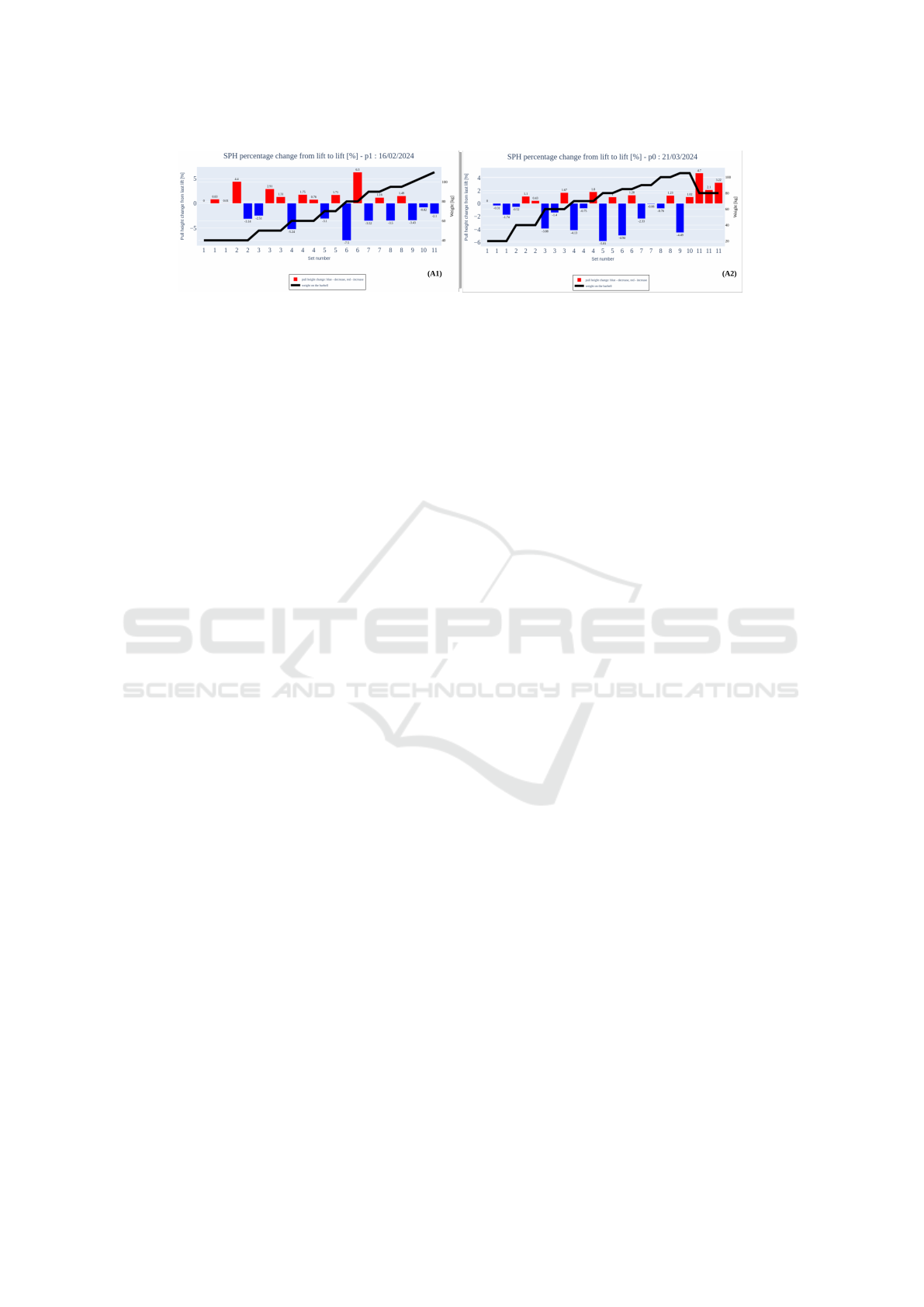
Figure 7: A1 and A2 - Examples of the Snatch Pull Height metric visualised as a percentage change from lift to lift across a
full snatch capture session for participants p0 and p1. Figures display the snatch pull height change as a bar chart with pull
height increase in blue and decrease in red; the weight on the barbell for each repetition and the set is overlaid as a black line
with the y-axis markings on the right side.
position has been altered, therefore giving a method
to flag setup changes and help improve the rigour of
the data capture process.
5 CONCLUSIONS
This paper presents autoWT, a system for enhancing
research and coaching practice in Olympic weightlift-
ing training through automated, long-term perfor-
mance tracking. The distributed architecture ef-
ficiently manages multiple high-bandwidth camera
data streams and supports low-specification con-
trol devices for processing and analysing Olympic
weightlifting movements. Key features such as multi-
camera capture, user data logging, and heart rate mon-
itoring have been carefully selected to build a versa-
tile, powerful, yet easily deployable system.
Our Lift Detector module automates Olympic lift
onset detection with high precision (0.898) and recall
(0.884) across snatch and clean & jerk movements,
providing reliable automated clip extraction for fur-
ther analysis. The Metric Extraction module, exem-
plified by the snatch pull height (SPH) metric, show-
cases the system’s ability to provide meaningful per-
formance data.
Furthermore, our analysis of start acceleration key
points across multiple sessions demonstrates the reli-
ability of using markerless pose estimation for long-
term performance tracking, with high repeatability
and normally distributed data. We have also shown
that deviations in data distribution can give the au-
toWT the ability to flag camera position changes, en-
hancing data capture rigour and ensuring consistent
measurement conditions.
Despite these advancements, the current study has
limitations, as not all aspects of the OW training pro-
cess have been integrated into the autoWT system.
Future work includes improvements to the Lift Detec-
tor module to automate periodic assistance movement
action recognition and individual repetition segmen-
tation. A full comprehensive system validation will
be needed using a larger more diverse dataset with
more participants.
Currently, autoWT computes a single perfor-
mance metric—snatch pull height. The range of
extracted metrics will be expanded to cover clean
& jerk, and assistance movements to enable perfor-
mance tracking across the entire OW training process.
The planned metrics will include the clean pull height,
jerk displacement, and jerk velocity, with each metric
informing us about lift efficiency changes.
Currently, the user interface of the controller app
and the WebApp are mainly geared towards control
of the system by an operator. In the future, the UI
will be further developed not only to allow control by
end users but also to provide users with instant per-
formance feedback. Figure 7 shows a proposed ver-
sion of the SPH metric feedback for observing perfor-
mance adjustments to weight increases across mul-
tiple repetitions. This visualisation can effectively
show how SPH changes during a training session and
inform the coach of different performance patterns.
In Figure 7, we draw attention to the changes from set
to set. Both athletes use comparatively light weights
for the first two sets, which do not give enough re-
sistance to control the weight with significant preci-
sion. Yet from set 3 onwards, two different patterns
for adjusting to increased weight from the previous
set become apparent. Participant 0 consistently shows
a more substantial drop when weight increases with
a slight increase in pull height in subsequent repeti-
tions. At the same time, Participant 1 also shows a
decrease in pull height but with an increase in every
consecutive repetition. The overall relative change
range for the athletes is similar. However, participant
1’s ability to increase the pull height for every follow-
ing set aligns with the athlete’s overall higher strength
base than Participant 0. The autoWT system will be
used to collect data for longitudinal studies to investi-
gate the effect of providing short-term and long-term
feedback to users using the identified metrics and data
visualisations. Notably, the data from these studies
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
70

will serve to develop performance forecasting models
integrating data from multiple sensors, including the
combination of heart rate data and performance met-
rics acquired from the camera sensors. By addressing
these areas, the autoWT system can further contribute
to performance optimization in Olympic weightlifting
and serve as an example for long-term performance
research of other complex sports movements.
In conclusion, the autoWT system offers a promis-
ing approach to objective, repeatable, long-term per-
formance tracking. The system has the potential to
transform research and coaching practice, opening
new avenues for future performance optimization in
Olympic weightlifting.
ACKNOWLEDGEMENTS
This research was funded and supported by the EP-
SRC’s DTP, Grant EP/T518128/1 and the industrial
partner - Gymshark. Additional thanks to Gian Singh
Cheema and Warley Weightlifting Club.
REFERENCES
Three-dimensional monitoring of weightlifting for com-
puter assisted training. In VRIC, Laval France.
AN, V. (1978). Weightlifting. International Weightlifting
Federation, Budapest.
Arandjelovi
´
c, O. (2017). Computer-Aided Parameter Selec-
tion for Resistance Exercise Using Machine Vision-
Based Capability Profile Estimation. Augmented Hu-
man Research, 2(1):4.
Bazarevsky, V., Grishchenko, I., Raveendran, K., Zhu, T.,
Zhang, F., and Grundmann, M. (2020). BlazePose:
On-device Real-time Body Pose tracking. Number:
arXiv:2006.10204 arXiv:2006.10204 [cs].
Bolarinwa, D., Qazi, N., and Ghazanfar, M. (2023). Shifting
the Weight: Applications of AI in Olympic Weightlift-
ing. In 2023 IEEE 28th(PRDC), pages 319–326.
ISSN: 2473-3105.
Destro, M. (2024). materight/RepNet-pytorch. original-
date: 2023-02-28T15:28:43Z.
Garhammer, J. and Newton, H. (2013). Applied Video
Analysis for Coaches: Weightlifting Examples. In-
ternational Journal of Sports Science & Coaching,
8(3):581–594.
He, Q., Li, W., Tang, W., and Xu, B. (2023). Recognition to
weightlifting postures using convolutional neural net-
works with evaluation mechanism. Measurement and
Control, page 00202940231215378. Publisher: SAGE
Publications Ltd.
Host, K. and Ivaši
´
c-Kos, M. (2022). An overview of Hu-
man Action Recognition in sports based on Computer
Vision. Heliyon, 8(6):e09633.
Hsu, C.-T., Ho, W.-H., and Chen, J.-S. (2019). High Effi-
cient Weightlifting Barbell Tracking Algorithm Based
on Diamond Search Strategy. In Arkusz, K., B˛edz-
i
´
nski, R., Klekiel, T., and Piszczatowski, S., editors,
Biomechanics in Medicine and Biology, pages 252–
262, Cham. Springer International Publishing.
Hsu, C.-T., Ho, W.-H., Tsai, W.-I., and Lin, Y.-C. (2018).
Realtime weightlifting barbell trajectory extraction
and performance analysis. | Physical Education Jour-
nal | EBSCOhost. ISSN: 1024-7297 Issue: 1 Pages:
73 Volume: 51.
Jian, M., Zhang, S., Wu, L., Zhang, S., Wang, X., and He, Y.
(2019). Deep key frame extraction for sport training.
Neurocomputing, 328:147–156.
Lin, C.-Y. and Jian, K.-C. (2022). A real-time algorithm for
weight training detection and correction. Soft Com-
puting, 26(10):4727–4739.
Mroz, S., Baddour, N., McGuirk, C., Juneau, P., Tu, A.,
Cheung, K., and Lemaire, E. (2021). Comparing the
Quality of Human Pose Estimation with BlazePose
or OpenPose. In 2021 4th International Conference
on Bio-Engineering for Smart Technologies (BioS-
MART), pages 1–4.
Needham, L., Evans, M., Cosker, D. P., Wade, L.,
McGuigan, P. M., Bilzon, J. L., and Colyer, S. L.
(2021). The accuracy of several pose estimation meth-
ods for 3D joint centre localisation. Scientific Reports,
11(1):20673. Number: 1 Publisher: Nature Publish-
ing Group.
Pan, S. (2022). A Method of Key Posture Detection and
Motion Recognition in Sports Based on Deep Learn-
ing. Mobile Information Systems, 2022:e5168898.
Publisher: Hindawi.
Rethinam, P., Manoharan, S., Kirupakaran, A. M.,
Srinivasan, R., Hegde, R. S., and Srinivasan, B.
(2023). Olympic Weightlifters’ Performance Assess-
ment Module Using Computer Vision. In 2023 IEEE
International Workshop on Sport, Technology and Re-
search (STAR), pages 8–12.
Yoshikawa, F., Kobayashi, T., Watanabe, K., Katsuyoshi,
S., and Otsu, N. (2010). Start and End Point Detection
of Weightlifting Motion using CHLAC and MRA:.
In B-Interface 2011, pages 44–50, Valencia, Spain.
SciTePress.
autoWT: A Semi-Automated ML-Based Movement Tracking System for Performance Tracking and Analysis in Olympic Weightlifting
71
