
Analysis of Truncated Singular Value Decomposition for Koopman
Operator-Based Lane Change Model
Chinnawut Nantabut
a
The Sirindhorn International Thai-German Graduate School of Engineering, King Mongkut’s University of Technology
North Bangkok, 1518 Pracharat 1 Road, Wongsawang, Bangsue, Bangkok, Thailand
Keywords:
Automated Driving, System Identification, Lane Change Model, Koopman Operator, Truncated Singular
Value Decomposition.
Abstract:
Understanding and modeling complex dynamic systems is crucial for enhancing vehicle performance and
safety, especially in the context of autonomous driving. Recently, popular methods such as Koopman operators
and their approximators, known as Extended Dynamic Mode Decomposition (EDMD), have emerged for
their effectiveness in transforming strongly nonlinear system behavior into linear representations. This allows
them to be integrated with conventional linear controllers. To achieve this, Singular Value Decomposition
(SVD), specifically truncated SVD, is employed to approximate Koopman operators from extensive datasets
efficiently. This study evaluates different basis functions used in EDMD and ranks for truncated SVD for
representing lane change behavior models, aiming to balance computational efficiency with information loss.
The findings, however, suggest that the technique of truncated SVD does not necessarily achieve substantial
reductions in computational training time and results in significant information loss.
1 INTRODUCTION
In automotive engineering, model or system identi-
fication is crucial for understanding the behavior of
traffic participants under various driving conditions.
This understanding is essential for improving vehi-
cle performance and safety, particularly when trans-
ferring insights from scene analysis in these scenar-
ios to autonomous vehicles, enhancing their decision-
making accuracy.
Given the complexity of modeling such behav-
iors, the underlying dynamic systems are inherently
nonlinear. To address these challenges, various mod-
eling techniques are employed, particularly black-
box models, which do not require explicit logical or
physical representations of the relationship between
inputs and outputs. Examples of these data-driven
approaches include neural networks, series models,
and autoregressive models (Mauroy and Goncalves,
2020).
One of the prominent data-driven approaches is
the Koopman operator. Although initially developed
long ago (Koopman, 1931), it has gained renewed at-
tention in modern applications for capturing the be-
havior of dynamical systems. Its appeal lies in its
a
https://orcid.org/0000-0002-5767-6023
connection to classical methods, the ability to in-
tegrate measurement-based formulations suitable for
machine learning, and the potential for simplification
in real-world applications (Brunton et al., 2021). An-
other advantage is that it provides a global representa-
tion of the system, unlike instantaneous linearization
or dynamic linearization, which offer only a local ap-
proximation of the model around a specific operating
point.
Since Koopman operators are theoretically
infinite-dimensional, the Extended Dynamic Mode
Decomposition (EDMD) method is employed to
approximate them using a set of smaller, more
manageable basis functions.
Koopman operators have been widely applied to
model identification, particularly within the automo-
tive industry (Manzoor et al., 2023). Notable exam-
ples include (Cibulka et al., 2019), where a single-
track model derived from a twin-track model was
used to generate trajectory data by varying tire forces
and kinematic variables. Their findings showed that
increased model complexity does not necessarily im-
prove accuracy. Similarly, (Yu et al., 2022a) assessed
model fidelity in lane-change scenarios using vari-
ous systems, while (Yu et al., 2022b) demonstrated
the ability of Koopman operators to reduce compu-
676
Nantabut, C.
Analysis of Truncated Singular Value Decomposition for Koopman Operator-Based Lane Change Model.
DOI: 10.5220/0012997800003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 676-683
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

tational complexities in vehicle tracking across dif-
ferent road types. Moreover, (Kim et al., 2022) ap-
plied Koopman operators to model lane-keeping sys-
tems by defining states based on lateral dynamics and
tire models, utilizing a Linear Quadratic Regulator
(LQR) for control. Their follow-up work (Kim et al.,
2023) compared multiple basis functions for model
identification, introducing systematic selection meth-
ods and signal normalization techniques. Meanwhile,
(Joglekar et al., 2023) investigated function approxi-
mators for Koopman operators in path-tracking appli-
cations.
The operators, particularly when paired with
model predictive control (MPC), have gained traction
for transforming nonlinear models into linear forms,
enhancing controller performance as shown by (Abra-
ham et al., 2017). (Gupta et al., 2022) addressed eco-
driving for electric vehicles using the Koopman oper-
ator with simulator data for high-performance MPC.
Similarly, (Buzhardt and Tallapragada, 2022) gener-
ated trajectories using a half-car and a terramechanics
model in deformable off-road scenarios, applying the
Koopman operator to lift states like vertical displace-
ment and using MPC for regulation.
Recent studies highlight the increasing use of neu-
ral networks as function approximators for the Koop-
man operator. For example, (Han et al., 2020) demon-
strated the integration of Koopman operators with
MPC, contrasting it with reinforcement learning ap-
proaches (RL). Similarly, (Xiao et al., 2023) enhanced
long-term predictability by combining deep neural
networks with Koopman operators, utilizing real driv-
ing data. In another study, (Guo et al., 2023) focused
on lane-changing scenarios with shared control sys-
tems, forming the Koopman operator through neural
networks and comparing the resulting paths to real
driver trajectories. Additionally, (Chen et al., 2024a)
employed neural networks to reformulate states into
input constraints for MPC, while (Bongiovanni et al.,
2024) applied the Koopman operator to model the
behavior of electrical throttle valves. Innovatively,
(Chen et al., 2024b) used neural network-based au-
toencoders for approximating ldriving behavior and
implemented adaptive MPC to handle parameter vari-
ations, showcasing the growing synergy between neu-
ral networks and Koopman operators in automotive
applications.
As mentioned earlier, Koopman operators enable
a linear representation of dynamic systems, which can
be framed in a linear state-space formulation using a
system matrix. To identify this matrix from the avail-
able data, it is necessary to invert a matrix constructed
from these data values. Given that this matrix is typ-
ically large and asymmetric, Singular Value Decom-
position (SVD) is utilized to enhance numerical sta-
bility. Additionally, due to the substantial size of the
data, the approximation technique known as truncated
SVD is employed to reduce the dimensions of the ma-
trices involved in the SVD process while preserving
as much essential information as possible from the
original inverted matrix. These methodologies not
only expedite the training process required to derive
the system matrix but also come with the trade-off of
potential information loss.
Procedures like truncated SVD have not been
thoroughly explored in the literature, with similar in-
vestigations primarily found in (Wilson, 2023), which
aimed to tackle the overfitting problem. However, this
study did not address the systematic approximation
rank of the matrix, and its application was outside
the realm of automotive contexts, concentrating in-
stead on simple dynamic models. This gap highlights
the need for further research into the utilization of
truncated SVD specifically within automotive appli-
cations, where the complexities of dynamic systems
demand more robust identification techniques.
In this paper, the use of truncated SVD for ap-
proximating the system matrix derived from the ba-
sis functions utilized in EDMD is investigated, as
discussed in Section 2. The focus is centered on a
use case involving lane-changing behavior. Initially,
data is generated using simple geometric models, fol-
lowed by the introduction and selection of basis func-
tions that serve as approximators. The process of cal-
culating system dynamics through SVD is detailed,
highlighting the significance of the truncated version
and the procedure for selecting the appropriate matrix
rank. All implementations are conducted in Python,
as outlined in Section 3. Finally, the resulting approx-
imations are analyzed and discussed in comparison to
the original matrix, considering aspects such as infor-
mation loss and time complexity.
It is important to note that topics like MPC as a
controller are not within the scope of this work and
are therefore excluded. Unlike the majority of the lit-
erature reviewed, the primary focus is on system or
model identification through the application of Koop-
man operators, alongside the associated techniques of
EDMD and truncated SVD.
2 METHOD
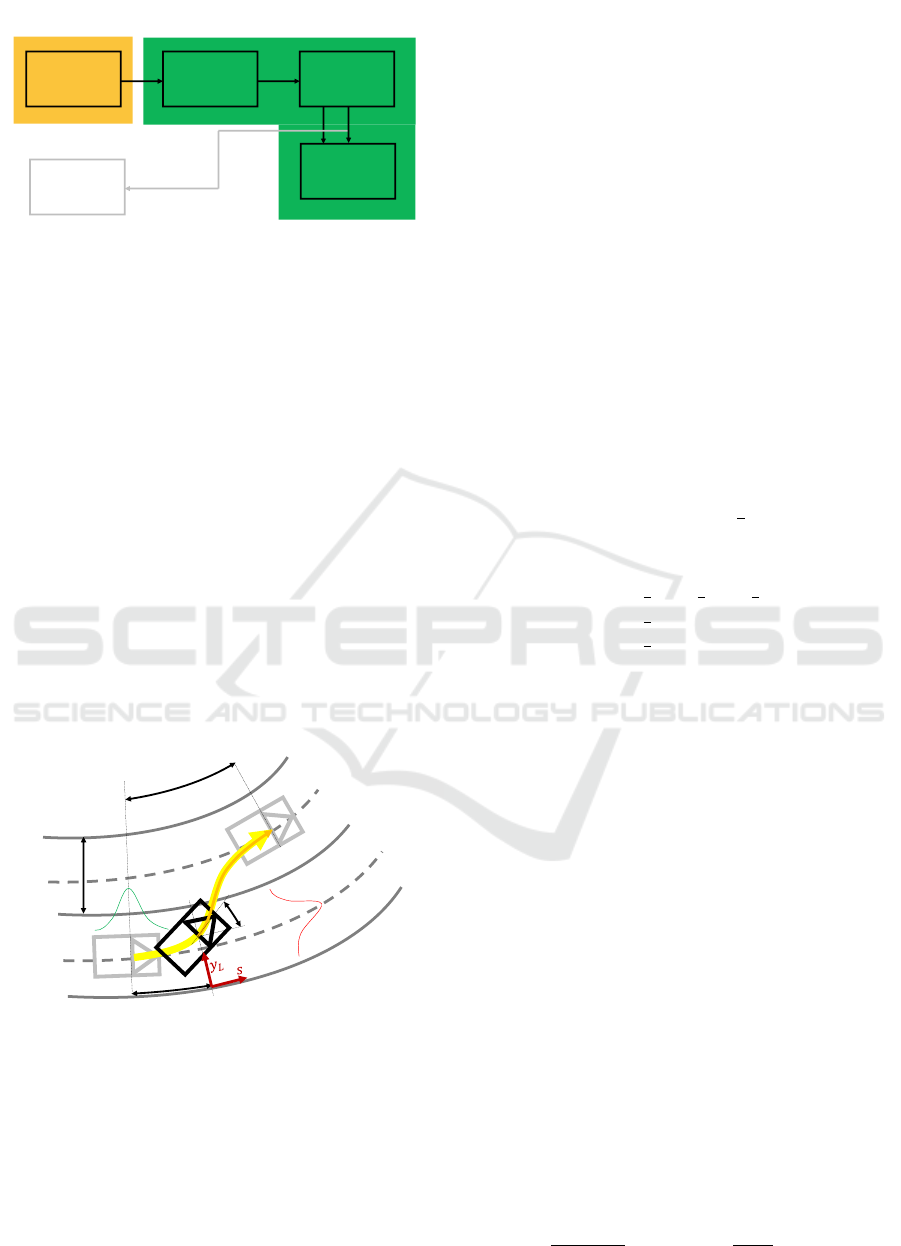
The analysis presented in this paper is summarized in
Figure 1. First, a simplified vehicle model for lane
change behavior is explained in Section 2.1, leading
to the generation of trajectories denoted as T . Next,
the primary focus of this paper - system identification
Analysis of Truncated Singular Value Decomposition for Koopman Operator-Based Lane Change Model
677
2.1: Lane
Change
Model
2.2.1:
Koopman
Operator
2.2.2:
Truncated
SVD
System Identification
𝒯
𝑨
෩
𝑨
2.2.3:
Reconstruction
Error
Controller
𝒦(𝒯)
Figure 1: Analysis steps for the truncated SVD-based
Koopman operator in a lane change model.
- is executed as detailed in Section 2.2, which consists
of three steps.
The Koopman operator K and the EDMD, along
with their basis functions Φ, are introduced in Section
2.2.1. The transformed trajectories K (T ) or their ap-
proximators Φ(T ) are then used to determine the sys-
tem matrix A
A
A, which describes the linear system.
Subsequently, an appropriate truncated SVD, se-
lected based on specific criteria, is discussed in Sec-
tion 2.2.2, resulting in the approximated system ma-
trix
˜
A
˜
A
˜
A. While the model for these trajectories is typ-
ically employed for controller design, this aspect is
not addressed in the current paper. Finally, the orig-
inal matrix A
A
A and the approximated one
˜
A
˜
A
˜
A are com-
pared to form the reconstruction errors, as discussed
in Section 2.2.3.
2.1 Lane Change Model
𝓣
𝑤
𝐿
𝑥
𝐿
𝑑
𝐿
𝒩
2
𝜓
𝒩
1
Figure 2: The calculation of lane change trajectories T is
based on (Schreier, 2017).
Since, in this paper, real data were not collected to ap-
proximate the model described by the Koopman oper-
ator, a mathematically simplified model proposed by
(Schreier, 2017) is used instead, as depicted in Figure
2.
Additionally, the longitudinal and lateral move-
ment of the vehicle can be modeled independently.
The vehicle transitions from the right to the left lane
of width w
L
in the Frenet-Serret frame, also known as
the lane frame, discribed by the coordinates s and y
L
.
The s axis runs along the right edge of the right lane,
whereas the y
L
axis is perpendicular to it and directed
to the left.
Furthermore, the vehicle is located at the posi-
tion (x
L
,y
L
) and is oriented to the lane at an angle
ψ. The longitudinal length of the complete trajectory,
depicted in yellow, is defined by d
L
. Starting from the
current pose, including the vehicle’s position and ori-
entation, a trajectory T in orange is generated until
the vehicle reaches the middle line of the left lane.
To model the longitudinal movement, a constant
acceleration model is utilized. In this model, the
longitudinal state at time step k is defined as X
s,k
X
s,k
X
s,k
=
[s
k
v
s,k
a
s,k
]
T
, where s
k
denotes the longitudinal dis-
placement along the road, v
s,k
represents the longitu-
dinal velocity, and a
s,k
indicates the longitudinal ac-
celeration at time step k. The next state X
s,k+1
X
s,k+1
X
s,k+1
can be
sampled from the normal distribution N
1
, as shown in
green in Figure 2:
s
k+1
v
s,k+1
a
s,k+1
∼ N
1 T
1
2
T
2
0 1 T
0 0 1
s
k
v
s,k
a
s,k
,
1
4
T
4
1
2
T
3
1
2
T
2
1
2
T
3
T
2
T
1
2
T
2
T 1
σ
2
a
s
!
,
(1)
where the first argument of the expression denotes the
mean vector, and the second one is represented by the
covariance matrix that depends on the sample time T
and the standard deviation in the longitudinal acceler-
ation σ
a
s
.
To model the lateral movement, which is approxi-
mated by sinusoidal geometry, the initial lateral posi-
tion y
L,0
is generated from the normal distribution N
2
,
as shown in red in Figure 2:
y
L,0
∼ N (0.5w
L
,σ
2
y
L
),
(2)
where σ
y
L
denotes the standard deviation in the lateral
displacement.
The start angle ψ
0
can be sampled from a uniform
distribution U, with the exclusion of zero:
ψ
0
∼ U]0,ψ
0,max
],
(3)
where ψ
0,max
is the maximal possible initial yaw an-
gle.
As derived in (Schreier, 2017), where y
L,0
must
also be larger than 0.5w
L
, the longitudinal length of
the complete trajectory d
L
can then be calculated by:
d
L
=
w
L
π
2tan(ψ
0
)
cos
sin
−1
2y
L,0
w
L
−2
!!
, (4)
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
678

as well as the current longitudinal displacement x
L
:
x
L
=
1
2
+
1
π
sin
−1
2y
L,0
w
L
−2
!!
d
L
. (5)
The initial position is then defined by (x
L
,y
L,0
),
where the longitudinal position at time step k = 0 is
set to s
0
= x
L
. The longitudinal position s
k
is updated
using the constant acceleration model. The new lat-
eral position y
L,k
is then computed by:
y
L,k
=
w
L
2
sin
π
d
L
(s
k
+ x
L
) −
π
2
!
+ w
L
. (6)
Subsequently, the trajectories for the following
system identification T can be defined by a set of N
T
trajectories T
i
, denoted by:
T
i
=
k
max
[
k=0
{(s
k
,y
L,k
)
i
},
(7)
where k
max
= max
k
{k∥(s
k
+ x
L
) ≤ d
L
}.
2.2 System Identification
Once the trajectories are generated in Section 2.1, the
next step is to understand how the system evolves
based on the presented data. Given the assumption
that the system is complex and nonlinear, Koopman
operators and EDMD are employed to elevate the sys-
tem into a higher-dimensional space where it can be
described linearly. This transformation enables the
application of typical linear modeling techniques such
as LQR or linear MPC.
Section 2.2.1 elaborates on the Koopman opera-
tor and its approximators, EDMD, highlighting their
roles in system transformation. Subsequently, to op-
timize computational efficiency, Section 2.2.2 dis-
cusses the reduction of linear system dynamics using
truncated SVD, focusing on methods to select an ap-
propriate threshold.
Finally, Section 2.2.3 covers the methods for re-
constructing truncated trajectories and compares them
with the original trajectories.
2.2.1 Koopman Operator
The concept of the Koopman operator K is to trans-
form or ”lift” the original nonlinearly dependent ad-
jacent states to another space where the relationship
between the new or lifted states becomes linear, as
illustrated in Figure 3. Here, the original states are
described by trajectories obtained from the previous
section, consisting of tuples representing longitudi-
nal displacement s and the lateral displacement y
L
.
𝑠
𝑦
𝐿
ǁ𝑠
𝑦
𝐿
𝒦
𝒦
−1
k
k+1
k+1
k
Figure 3: The Koopman operator K ”lifts” states at differ-
ent time steps, from (s,y
L
) to ( ˜s, ˜y
L
). This transformation
converts the nonlinear dependency among adjacent states
into a linear one. Dealing with the lifted states becomes
more manageable compared to the original states.
Since these trajectories are generated from sinusoidal
curves, the transition from one state to another is in-
herently nonlinear. With the Koopman operator K ,
the states can be transformed into the lifted ones
K (s,y
L
) such that
K (s,y
L
)
k+1
= A
A
AK (s,y
L
)
k
,
(8)
where A
A
A is the system matrix describing the linear de-
pendency between the current (at time step k) lifted
states ( ˜s, ˜y
L
)
k
= K (s,y
L
)
k
, and the next lifted states
( ˜s, ˜y
L
)
k+1
= K (s,y
L
)
k+1
.
Since the Koopman operator is infinite-
dimensional, it can only be approximated using
EDMD. (8) can then be transformed into:
Φ(s,y
L
)
k+1
≈A
A
AΦ(s,y
L
)
k
,
(9)
where Φ denotes the function approximator that aims
to describe the linearity as accurately as possible.
There are various options for selecting function
approximators. A common approach involves using
a set of basis functions to construct them. One widely
used type is the monomial basis:
Φ
m
(s,y
L
) =
s
y
L
s
2
y
2
L
.
.
.
s
N
m
y
N
m
L
, (10)
where N
m
denotes the highest order of polynomials.
Another common type is the thin plate spline ra-
dial basis, described by:
Φ
r
(s,y
L
) =
s
y
L
∥s −c
s
∥
2
2
log(∥s −c
s
∥
2
)
∥y
L
−c
y
∥
2
2
log(∥y
L
−c
y
∥
2
)
, (11)
Analysis of Truncated Singular Value Decomposition for Koopman Operator-Based Lane Change Model
679

where ∥·∥
2
denotes the l
2
-norm (which, in this con-
text, is simply the absolute value), and the constants
c
s
as well as c
y
are randomly chosen.
At the end, the transformed trajectory K (T
i
) is ob-
tained, which can be approximated as:
Φ(T
i
) =
k
max
[
k=0
{Φ(s
k
,y
L,k
)
i
}.
(12)
2.2.2 Truncated SVD
In the case of EDMD, once the states are lifted using
the operator Φ, the lifted states are then stored and
utilized for subsequent training processes. To deter-
mine the system matrix A
A
A that captures the linearity,
the inversion of K (s,y
L
)
k
in (8) or Φ(s, y
L
)
k
in (9) is
necessary. This involves employing SVD for numer-
ical stability, which can also be truncated to expedite
the training process. However, not only two tuples
of Φ(s,y
L
)
k
are utilized, but the entire trajectories are
used to determine the system matrix A
A
A. At first, a so-
called snapshot matrix of trajectory T
i
, X
i
X
i
X
i
, can be de-
fined as:
X
i
X
i
X
i
=
Φ(s
0
,y
L,0
)
i
... Φ(s
k
max
−1
,y
L,k
max
−1
)
i
,
(13)
and its right-shifted snapshot matrix X
′
i
X
′
i
X
′
i
is denoted by:
X
′
i
X
′
i
X
′
i
=
Φ(s
1
,y
L,1
)
i
... Φ(s
k
max
,y
L,k
max
)
i
.
(14)
Consequently, the total snapshot matrix of all tra-
jectories T , X
X
X , is computed by:
X
X
X =
X
1
X
1
X
1
X
2
X
2
X
2
... X
N
T
X
N
T
X
N
T
, (15)
and its total shifted snapshot matrix X
′
is denoted by:
X
′
X
′
X
′
=
X
′
1
X
′
1
X
′
1
X
′
2
X
′
2
X
′
2
... X
′
N
T
X
′
N
T
X
′
N
T
. (16)
The linear dynamics of the system can be approx-
imated, using the system matrix A
A
A, by:
X
′
X
′
X
′
≈A
A
AX
X
X ,
(17)
analogous to (8) and (9).
Since the matrix X
X
X is not square, its pseudo-
inverse or Moore-Penrose inverse X
†
X
†
X
†
is computed in-
stead to calculate the system matrix A
A
A:
A
A
A ≈X
′
X
†
X
′
X
†
X
′
X
†
,
(18)
where X
†
X
†
X
†
= X
T
X
T
X
T
(X X
T
X X
T
X X
T
)
−1
as derived from the so-
called normal equation.
Alternatively, the snapshot real matrix X
X
X can be
reformulated using SVD, resulting in the form:
X
X
X =U
U
UΣ
Σ
ΣV
T
V
T
V
T
,
(19)
which results in the pseudo-inverse X
†
X
†
X
†
of the form:
X
†
X
†
X
†
= V Σ
−1
U
T
V Σ
−1
U
T
V Σ
−1
U
T
,
(20)
where the Σ
Σ
Σ-matrix is displayed as:
Σ
Σ
Σ =
σ
1
0 0 ... 0 0 ... 0
0 σ
2
0 ... 0 0 ... 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. ... σ
r
max
0 ... 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 . . . 0 0 . . . 0
, (21)
given that this matrix (and therefore X
X
X ) has a rank
of r
max
, the singular values are sorted in descending
order, namely σ
1
≥ σ
2
≥ ... ≥ σ
r
max
.
By choosing a specific rank r ≤ r
max
, an approxi-
mated
˜
X
˜
X
˜
X in the truncated SVD is obtained by:
˜
X
˜
X
˜
X =
˜
U
˜
Σ
˜
V
T
˜
U
˜
Σ
˜
V
T
˜
U
˜
Σ
˜
V
T
,
(22)
where
˜
U
˜
U
˜
U = U
U
U
:,1:r
,
˜
Σ
˜
Σ
˜
Σ = Σ
Σ
Σ
1:r,1:r
, and
˜
V
˜
V
˜
V = V
V
V
1:r,:
.
Now, the question of how to systematically choose
the rank r is posed. As suggested in (Brunton and
Kutz, 2019), the percentual accumulated ”energy” up
to rank r can be calculated as:
E
r
= 100% ·
∑
r
i=1
σ
i
∑
r
max
i=1
σ
i
.
(23)
Typically, the empirical values of E
r
= 90% or
E
r
= 99% are used to determine the appropriate rank,
resulting in a good representation
˜
X
˜
X
˜
X of the original
snapshot matrix X
X
X . Alternatively, a hard threshold
(HT) based on the ratio β =
m
n
of the dimensions of the
(snapshot) matrix X
X
X
n×m
and the median of its singular
values σ
med
is recommended by (Gavish and Donoho,
2014). The hard threshold r
HT
is calculated by:
r
HT
= ω(β)σ
med
,
(24)
where ω(β) is based purely on the ratio β and can be
calculated accordingly. Since some values of the rela-
tionship between β and ω are provided, interpolation
techniques can be employed to roughly determine the
hard threshold rank r
HT
used to approximate the snap-
shot matrix X
X
X .
The system matrix A
A
A can be approximated by an
approximated system matrix
˜
A
˜
A
˜
A:
˜
A
˜
A
˜
A = X
′
˜
V
˜
Σ
−1
˜
U
T
X
′
˜
V
˜
Σ
−1
˜
U
T
X
′
˜
V
˜
Σ
−1
˜
U
T
.
(25)
Analogous to (9), the approximated system dy-
namics can then be described as:
Φ(s,y
L
)
k+1
≈
˜
A
˜
A
˜
AΦ(s,y
L
)
k
.
(26)
The next states (s,y
L
)
k+1
can then be retrieved by
inverting the operator Φ.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
680

2.2.3 Reconstruction Error
To evaluate model fidelity, the Frobenius norm ∥B
B
B∥
F
of a matrix B
B
B can be used, where ∥B
B
B∥
F
=
q
∑
j
∑
i
b
2
i j
and b
i j
denotes the elements of the matrix B
B
B. This
norm allows for a comparison of the system dynam-
ics between the full-ranked system matrix A
A
A and its
truncated version
˜
A
˜
A
˜
A.
The relative reconstruction error of the truncated
matrix
˜
A
˜
A
˜
A is represented by:
RE
˜
A
˜
A
˜
A
=
∥A
A
A −
˜
A
˜
A
˜
A∥
F
∥A
A
A∥
F
.
(27)
The time consumption of the truncated matrix
˜
A
˜
A
˜
A
can also be measured relative to the full matrix A
A
A:
˜
t
˜
A
˜
A
˜
A
=
t
˜
A
˜
A
˜
A
t
A
A
A
.
(28)
All the steps outlined in Figure 1 are summarized
in Algorithm 1 for the easy implementation of the
analysis proposed in this paper. This includes the def-
inition of necessary variables, the collection of data,
the execution of truncated SVD, and the analysis of
the results using various metrics.
3 SIMULATION
All parameters utilized in the previous section, as
summarized in Algorithm 1, are defined here. The
comparison between the original data and the Koop-
man operators using different types of basis func-
tions is illustrated. Additionally, qualitative trajecto-
ries based on truncated SVD with various rank selec-
tions are compared and analyzed. Finally, the time
consumption for these processes is also discussed.
3.1 Setup
Taken from the original paper for modeling lane
change behavior (Schreier, 2017), the lane width
w
L
is set to 3.5 m. With the vehicle width w
V
of 1.5 m, the standard deviation of lateral deviation
σ
y
L
=
1
3
0.5(w
L
−w
V
) =
1
3
m, whereas the value of the
longitudinal direction σ
a
s
=
0.2
3
m
s
2
. The time constant
T is set to 0.1 s. The initial kinematic variables are
s
0
= 0 m, v
0
= 10
m
s
, and a
0
= 0
m
s
2
. The vehicle can
start with a maximal orientation of ψ
0
= 15
◦
.
To ensure both basis functions have the same di-
mension, N
m
is set to 2. Furthermore, the constants c
s
and c
y
are sampled from a uniform distribution rang-
ing between −
w
L
2
and +
w
L
2
.
Step I: Define all parameters:
1. Lane Change Model:
(a) Road geometry w
L
(b) Standard deviations: σ
a
s
, and σ
y
L
(c) Time constant T
(d) Kinematic variables a
0
, v
0
, s
0
, and ψ
0,max
2. Basis function:
(a) Monomial N
m
(b) Thin plate spline radial c
s
and c
y
Step II: Collecting data: Trajectory puffer T
For each trajectory i, T
i
←
/
0 :
1. Sample the initial lateral displacement
y
L,k
= y
L,0
from (2) and the initial yaw angle
ψ
0
from (3)
2. Calculate the trajectory’s longitudinal length
d
L
from (4) and the current displacement
s
k
= x
L
from (5)
3. T
i
← {(s
k
,y
L,k
)}
4. While s
k
≤ d
L
:
(a) Update the longitudinal displacement s
k
using (1) and the lateral displacement y
L,k
using (6)
(b) T
i
← T
i
∪{(s
k
,y
L,k
)}
5. Update T ← T ∪T
i
Step III: Truncated SVD
1. Calculate snapshot matrices X
X
X and X
′
X
′
X
′
based
on (13), (14), (15) and (16)
2. Use SVD on the snapshot matric X
X
X using (19)
3. Calculate the rank r using (23) or (24)
4. Construct truncated snapshot matrix
˜
X
˜
X
˜
X using
(22) and the system matrix
˜
A
˜
A
˜
A using (25)
Step IV: Evaluation
1. Calculate the relative reconstruction error
RE
˜
A
˜
A
˜
A
using (18), (25) and (27) and the relative
time consumption
˜
t
˜
A
˜
A
˜
A
using (28)
Algorithm 1: Truncated SVD for Koopman Operator-Based
Lane Change Model.
3.2 Results
In Figure 4, a single trajectory illustrating a lane
change maneuver (from the red right middle lane to
the green left middle lane) is depicted in blue, based
on the approach by (Schreier, 2017) as detailed in
Section 2.1. The vehicle follows a simple sinusoidal
pattern, returning to the right lane after exceeding
the maximum longitudinal displacement d
L
, as pre-
viously discussed.
Analysis of Truncated Singular Value Decomposition for Koopman Operator-Based Lane Change Model
681
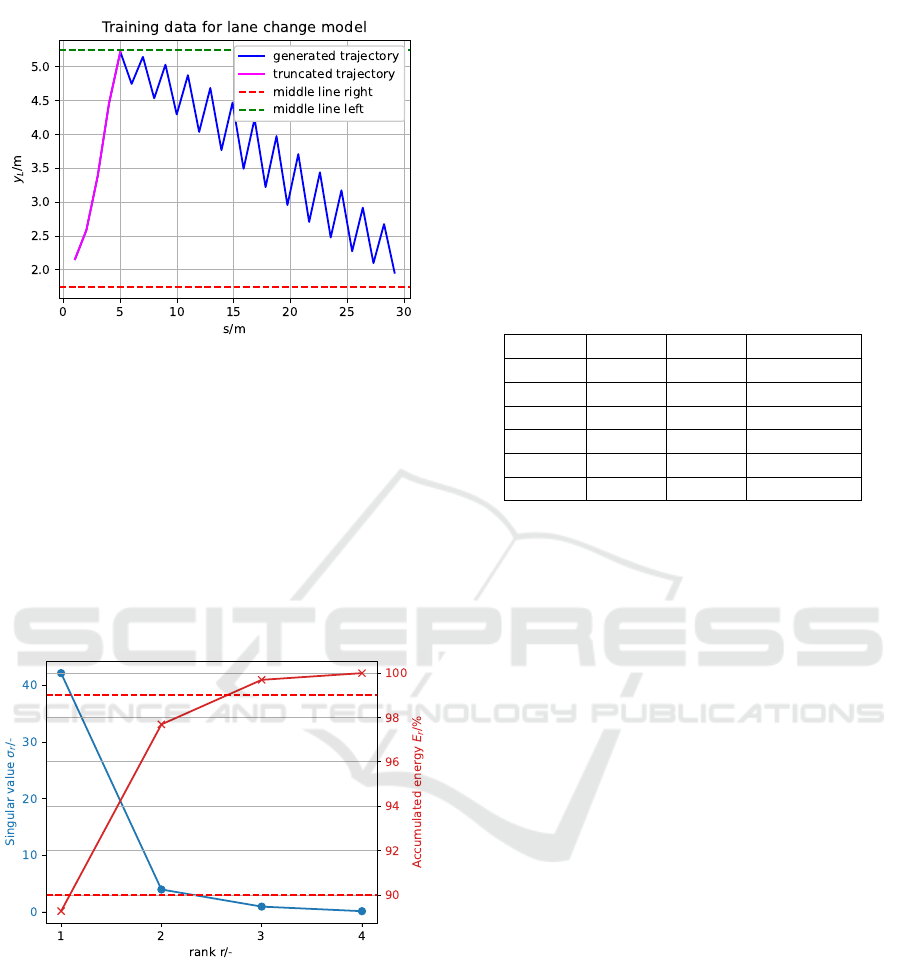
Figure 4: An exemplary original trajectory used for training
the system matrix A
A
A or
˜
A
˜
A
˜
A illustrates a disadvantage of choos-
ing this model when the longitudinal displacement (s
k
+x
L
)
reaches the maximum longitudinal sinusoidal length d
L
, as
explained in Equation 7.
Subsequently, strong oscillations occur, stemming
from the constant acceleration model used for longi-
tudinal movement, impacting the lateral movement as
well. Therefore, the generated data needs truncation
before further model training. However, this trunca-
tion results, as shown in magenta, in shorter trajec-
tories than anticipated, potentially leading to model
overfitting.
Figure 5: The sorted singular values σ
r
and their accumu-
lated energy E
r
are visualized against their ranks r, using
the example of monomial basis functions. Horizontal lines
representing the empirical values E
r
= 90% and E
r
= 99%
are also plotted to aid in identifying their corresponding sin-
gular value.
Now, the truncated trajectory is subjected to trun-
cated SVD by constructing the matrix X
X
X and sorting
its singular values σ
i
. The accumulated energy E
r
is
calculated for each singular value, and their values
are plotted in Figure 5 using monomial basic func-
tions. In this example, it is observed that approxi-
mately E
r
= 90 % is achieved directly at the first sin-
gular value (E
r
≈89%), as it is relatively large (≥30)
compared to the others. According to the plot, the
third singular value corresponds to E
r
= 99%.
However, upon calculating the hard threshold rank
r
HT
, it is found that it exceeds 4. Therefore, the full
rank is used in this case instead. Additionally, simi-
lar observations have been made for the radial basis
functions, resulting in identical rank selections.
Table 1: Comparison of the truncated SVD performance
(E
r
= 90%, E
r
= 99% and HT : hard threshold) based on
different basis functions (m: monomial and r: thin plate
spline radial), including metrics such as the relative recon-
struction error and the time consumption.
Basis rank r RE
˜
A
˜
A
˜
A
/% min{
˜
t
˜
A
˜
A
˜
A
}/%
Φ
m,90%
1 99.54 89.97
Φ
m,99%
3 95.76 96.47
Φ
m,HT
4 (full) 0 100
Φ
r,90%
1 98.14 95.16
Φ
r,99%
3 60.81 97.21
Φ
r,HT
4 (full) 0 100
The relative reconstruction error RE
˜
A
˜
A
˜
A
and the min-
inmal relative time consumption min{
˜
t
˜
A
˜
A
˜
A
} of the sys-
tem matrix A
A
A are compared in Table 1. It is observed
for each type of basis function that the reconstruction
error decreases with higher rank selections.
Additionally, in the lane change model with the
previously collected data, the radial basis function
demonstrates superior model fidelity. However, with
truncated SVD, the reconstruction errors are rela-
tively large (> 50%), prompting the use of the full-
ranked matrix A
A
A due to the hard threshold.
Furthermore, truncated SVD does not consistently
reduce time consumption, as evidenced by cases
where
˜
t
˜
A
˜
A
˜
A
exceeds 100 %. The minimal time consump-
tion is highlighted here, underscoring the potential for
reduced computation time with truncated SVD.
4 CONCLUSIONS
This study investigates the efficacy of truncated SVD
in conjunction with Koopman operators and EDMD
for system identification in the context of lane change
behavior. The results indicate that while these tech-
niques do not necessarily lead to a significant reduc-
tion in the computational time required for training
the system matrix, they entail a compromise in model
fidelity.
To validate these findings, future research will
explore the use of diverse datasets for training and
conduct a more comprehensive statistical analysis, as
well as analyze controllers not covered here.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
682

REFERENCES
Abraham, I., Torre, G. D. L., and Murphey, T. D.
(2017). Model-based control using koopman opera-
tors. CoRR, abs/1709.01568.
Bongiovanni, N., Mavkov, B., Martins, R., and Allibert,
G. (2024). Data-Driven Nonlinear System Identifica-
tion of a Throttle Valve Using Koopman Representa-
tion. In American Control Conference (ACC 2024),
Toronto, Canada.
Brunton, S. L., Budi
ˇ
si
´
c, M., Kaiser, E., and Kutz, J. N.
(2021). Modern koopman theory for dynamical sys-
tems.
Brunton, S. L. and Kutz, J. N. (2019). Data-Driven Science
and Engineering: Machine Learning, Dynamical Sys-
tems, and Control. Cambridge University Press, USA,
1st edition.
Buzhardt, J. and Tallapragada, P. (2022). A koopman op-
erator approach for the vertical stabilization of an off-
road vehicle. IFAC-PapersOnLine, 55(37):675–680.
2nd Modeling, Estimation and Control Conference
MECC 2022.
Chen, H., He, X., Cheng, S., and Lv, C. (2024a). Deep
koopman operator-informed safety command gover-
nor for autonomous vehicles. IEEE/ASME Transac-
tions on Mechatronics, pages 1–11.
Chen, Z., Chen, X., Liu, J., Cen, L., and Gui, W. (2024b).
Learning model predictive control of nonlinear sys-
tems with time-varying parameters using koopman
operator. Applied Mathematics and Computation,
470:128577.
Cibulka, V., Hanis, T., and Hromcik, M. (2019). Data-
driven identification of vehicle dynamics using koop-
man operator. 2019 22nd International Conference on
Process Control (PC19), pages 167–172.
Gavish, M. and Donoho, D. L. (2014). The optimal hard
threshold for singular values is 4/
√
3. IEEE Transac-
tions on Information Theory, 60(8):5040–5053.
Guo, W., Zhao, S., Cao, H., Yi, B., and Song, X.
(2023). Koopman operator-based driver-vehicle dy-
namic model for shared control systems. Applied
Mathematical Modelling, 114:423–446.
Gupta, S., Shen, D., Karbowski, D., and Rousseau, A.
(2022). Koopman model predictive control for eco-
driving of automated vehicles. In 2022 American Con-
trol Conference (ACC), pages 2443–2448.
Han, Y., Hao, W., and Vaidya, U. (2020). Deep learning
of koopman representation for control. In 2020 59th
IEEE Conference on Decision and Control (CDC),
pages 1890–1895.
Joglekar, A., Samak, C., Samak, T., Kosaraju, K. C.,
Smereka, J., Brudnak, M., Gorsich, D., Krovi, V., and
Vaidya, U. (2023). Analytical construction of koop-
man edmd candidate functions for optimal control
of ackermann-steered vehicles. IFAC-PapersOnLine,
56(3):619–624. 3rd Modeling, Estimation and Con-
trol Conference MECC 2023.
Kim, J. S., Quan, Y. S., and Chung, C. C. (2022). Data-
driven modeling and control for lane keeping sys-
tem of automated driving vehicles: Koopman opera-
tor approach. In 2022 22nd International Conference
on Control, Automation and Systems (ICCAS), pages
1049–1055.
Kim, J. S., Quan, Y. S., and Chung, C. C. (2023). Koop-
man operator-based model identification and control
for automated driving vehicle. International Jour-
nal of Control, Automation and Systems 21, page
2431–2443.
Koopman, B. O. (1931). Hamiltonian systems and transfor-
mation in hilbert space. Proceedings of the National
Academy of Sciences, 17(5):315–318.
Manzoor, W. A., Rawashdeh, S., and Mohammadi, A.
(2023). Vehicular applications of koopman operator
theory—a survey. IEEE Access, 11:25917–25931.
Mauroy, A. and Goncalves, J. (2020). Koopman-based
lifting techniques for nonlinear systems identifica-
tion. IEEE Transactions on Automatic Control,
65(6):2550–2565.
Schreier, M. (2017). Bayesian environment representa-
tion, prediction, and criticality assessment for driver
assistance systems. at - Automatisierungstechnik,
65(2):151–152.
Wilson, D. (2023). Koopman operator inspired nonlinear
system identification. SIAM Journal on Applied Dy-
namical Systems, 22(2):1445–1471.
Xiao, Y., Zhang, X., Xu, X., Liu, X., and Liu, J. (2023).
Deep neural networks with koopman operators for
modeling and control of autonomous vehicles. IEEE
Transactions on Intelligent Vehicles, 8(1):135–146.
Yu, S., Shen, C., and Ersal, T. (2022a). Autonomous driv-
ing using linear model predictive control with a koop-
man operator based bilinear vehicle model. IFAC-
PapersOnLine, 55(24):254–259. 10th IFAC Sympo-
sium on Advances in Automotive Control AAC 2022.
Yu, S., Sheng, E., Zhang, Y., Li, Y., Chen, H., and Hao, Y.
(2022b). Efficient nonlinear model predictive control
of automated vehicles. Mathematics, 10(21).
Analysis of Truncated Singular Value Decomposition for Koopman Operator-Based Lane Change Model
683
