
Human-Robot Cooperation in Disassembly: A Rapid Review
Sara Jacob
1,2
, Nathalie Klement
2
, Richard Bearee
2
and Marie-Pierre Pacaux-Lemoine
1
1
UPHF, CNRS, UMR 8201, LAMIH, F-59313 Valenciennes, France
2
Arts et M
´
etiers Institute of Technology, LISPEN, F-59000 Lille, France
Keywords:
Human-Robot Cooperation, Disassembly, Task Allocation, Optimization.
Abstract:
Despite the evolution of autonomous systems, manual disassembly of electrotechnical devices persists due
to the limitations associated with product variability. Effective cooperation between humans and robots is
essential to overcome the constraints of disassembly. This article presents a literature review focusing on
human-robot cooperation in disassembly, with the aim of summarizing existing research, identifying gaps,
and defining possible contributions. The state of the art includes methodologies for product representation,
task allocation between a human and a robot, and task scheduling optimization. Efficient cooperation would
integrate human adaptability, robot efficiency, and direct communication, to anticipate disassembly actions to
prioritize the well-being and involvement of the human at every stage of the process.
1 INTRODUCTION
Nowadays, the growing quantity of electronic waste
is a major challenge. The disassembly complexity of
these devices has an indicative impact on the environ-
ment and the economy. Despite the need for many
tasks to be carried out, manual disassembly persists,
affecting workers’ health and operational efficiency.
Humans have difficulty facing the workload imposed
and the inherent difficulty of disassembly tasks. At
the same time, even though autonomous systems are
evolving, their use in disassembly is limited by prod-
uct variability (Hjorth et al., 2022). This product vari-
ability requires a flexible and adaptable system. With
the respective limits and advantages of the agents, co-
operation between human and robot would offer pos-
sibilities for dealing with the constraints encountered
in manual disassembly and that with fully automated
systems. The question to be resolved is how to ensure
efficient cooperation between human and robot, while
encouraging the attractiveness of this new approach.
This article proposes a literature review focusing on
human-robot cooperation intended to roboticists, au-
tomaticians and the human sciences in the context
of disassembly. It aims to summarize the work that
has been done and to highlight current gaps, with a
view to highlighting our contribution and guiding our
study.
2 LITERATURE REVIEW
2.1 Methodology for a Review
The rapid review, conducted using the SCOPUS
database and providing an accelerated synthesis, aims
to outline interactions among various agents, partic-
ularly in cooperative contexts, and to review disas-
sembly methods and planning. Focusing on disassem-
bly and human-robot cooperation, we combined these
keywords to form the basis of our research:
disassembl* AND (cooperati* OR collaborat*) AND
((human AND robot) OR allocat*)
• Disassembl*: Focus on research and studies on
the disassembly process and its issues.
• Cooperati* OR Collaborat*: Include work that
considers aspects of cooperation between differ-
ent agents, detailing how they interact and mutu-
ally support each other in a shared work environ-
ment. The term ”collaboration” in robotics can be
synonymous with ”cooperation” in automation.
• (Human AND Robot) OR Allocat*: Focus on the
relationship between humans and robots, and on
the way in which tasks are allocated between these
two agents.
Before analyzing the titles and abstracts of documents
obtained, inclusion and exclusion criteria are defined
(Table 1).
212
Jacob, S., Klement, N., Bearee, R. and Pacaux-Lemoine, M.-P.
Human-Robot Cooperation in Disassembly: A Rapid Review.
DOI: 10.5220/0013000100003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 212-219
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
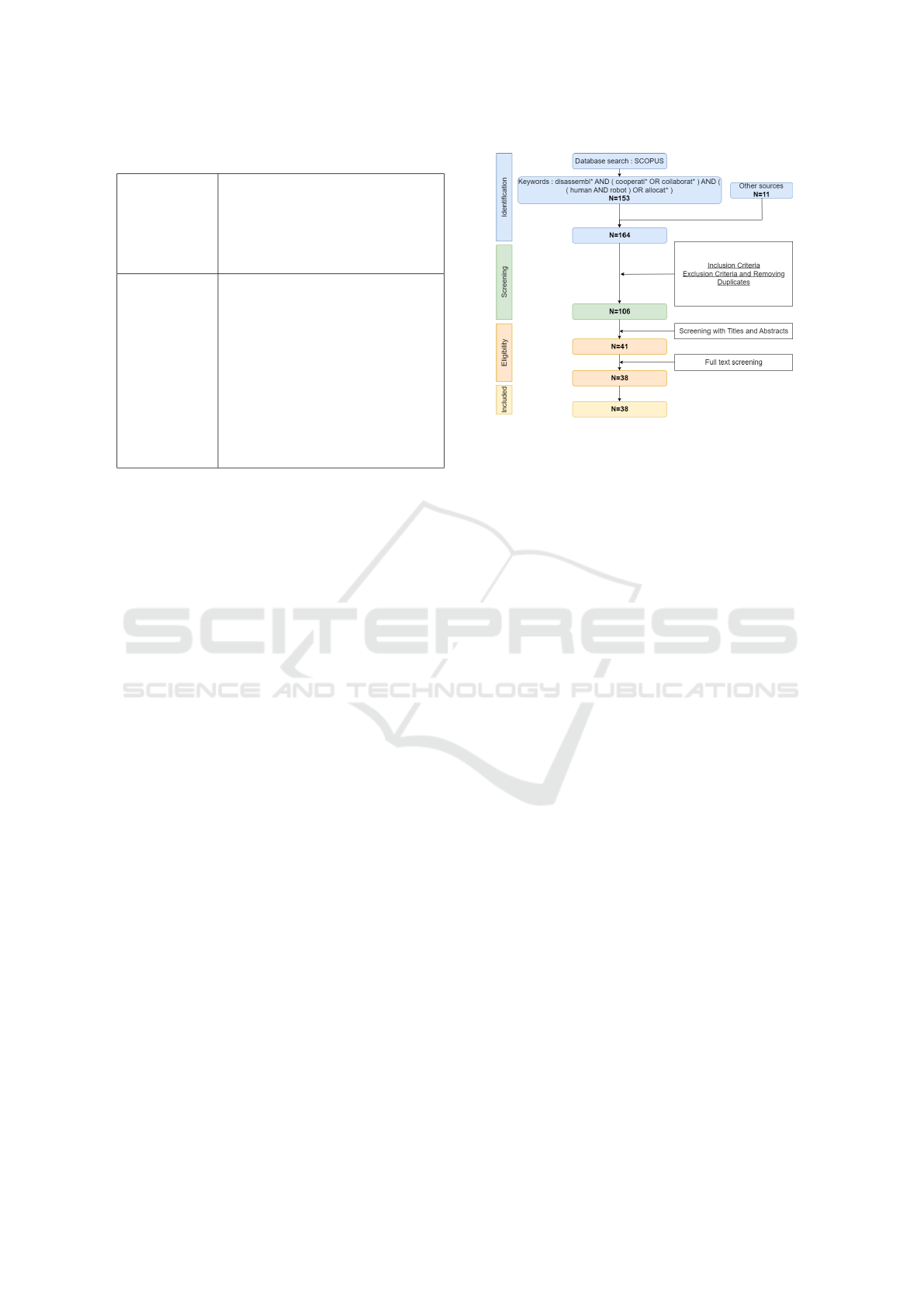
Table 1: Inclusion and Exclusion Criteria.
Inclusion Criteria
• Publication Year: From 2014 to 2024
• English language
• Document type: Conference paper, Article,
Conference Review, Review
Exclusion Criteria Subject areas not related to our research
• Physics and Astronomy
• Business
• Management and Accounting
• Chemical Engineering
• Chemistry
• Biochemistry
• Genetics and Molecular Biology
• Neuroscience
Research from the last 10 years until today has
been taken into account, excluding fields not related
to the research topic. Furthermore, only the docu-
ment types ”Conference Paper”, ”Article”, ”Confer-
ence Review” and ”Review” available on SCOPUS
have been included, thus excluding papers relating to
books. After that, a review of the titles and abstracts
allowed us to select only a limited number of articles
that seemed relevant to our question concerning the
efficient use of human-robot cooperation in disassem-
bly. A complete analysis of the texts is then carried
out, and a synthesis is presented, outlining the state of
the art on the subject of disassembly and cooperation,
as well as the methods used to allocate disassembly
tasks.
2.2 Results of Execution
A keyword search on SCOPUS allows us to visual-
ize 153 documents. Eleven documents from external
sources were added, which enabled us to familiarize
ourselves with the subject and which met the inclu-
sion and exclusion criteria (Table 1), finally making
it possible to study 164 documents in total. After ap-
plying inclusion and exclusion criteria, and removing
duplicates, 106 documents remained to be analyzed,
based on titles and abstracts. In the end, 41 documents
were studied, some of which were excluded after text
analysis (Fig. 1).
3 STATE OF THE ART
The methodology employed in disassembly efficiency
improvement, as seen across literature, typically com-
Figure 1: Rapid review.
prises three steps: product representation for task se-
quencing, task allocation based on predefined criteria
for human or robot involvement, and task scheduling
optimization using algorithms. This chapter is thus
structured accordingly to represent these steps.
3.1 Disassembly
In an era where technology is evolving, the quantity
of electrotechnical waste is growing rapidly. Disas-
sembling these products is part of the circular econ-
omy for their end-of-life treatment. This process has
the advantage of extending the life of equipment and
maximizing its value while reducing the environmen-
tal and economic impact of the constant production of
electrotechnical products (Lee et al., 2020b; Li et al.,
2019; Vongbunyong et al., 2017; Huang et al., 2019;
Wu et al., 2024). However, the question is how these
products can be disposed of. The following points can
be noted up to now (Table 2).
Defining product end-of-life could help to define
the tasks to be executed during disassembly. This
disassembly could be destructive or non-destructive,
and it would be easier to identify until which sub-
assemblies and components should be extracted. Guo
et al. (2023) went further, proposing partial destruc-
tive disassembly by representing the degree of degra-
dation of the product at end-of-life. These end-use
scenarios influence the disassembly process and the
methods used to recover components. In this way,
methods are proposed for classifying products and
representing them, so that the disassembly sequence
can then be determined. End-of-life products can be
represented using AND/OR graphs (Fang et al., 2023;
Xu et al., 2020a; Chu et al., 2023; Lou et al., 2024;
Parsa et al., 2021), oriented graphs (Lee et al., 2020b;
Jungbluth et al., 2017; Liao et al., 2023; Lee et al.,
Human-Robot Cooperation in Disassembly: A Rapid Review
213
Table 2: Product management.
Group Product Management Papers
Requalification Maintenance, Reuse,
Repairs,
Remanufacturing
Hjorth et al. (2022), Li et al. (2019), Huang et al. (2019), Wu et al. (2024), Ding et al. (2019), Jungbluth
et al. (2017), Sartori and Schlette (2021), Buhl et al. (2019), Liao et al. (2023), Fang et al. (2023), Chen
et al. (2023), Prioli and Rickli (2020), Chen et al. (2022), Xu et al. (2020a), Xu et al. (2020b) Guo
et al. (2023), Chu et al. (2023), Lou et al. (2024), Huang et al. (2021), Belhadj et al. (2022), Lee et al.
(2022)
Take-back and
Waste treatment
Recycling, Recovery,
Proper disposal
Lee et al. (2020b), Wu et al. (2024), Ding et al. (2019), Jungbluth et al. (2017), Liao et al. (2023), Fang
et al. (2023), Chen et al. (2023), Prioli and Rickli (2020), Chen et al. (2022), Guo et al. (2023), Chu
et al. (2023), Lou et al. (2024), Huang et al. (2021), Lee et al. (2022), Chatzikonstantinou et al. (2019),
Liu et al. (2023), Yuan et al. (2023), Lee et al. (2020a), Parsa et al. (2021), Renteria et al. (2019)
2020a), priority and constraint disassembly matrices
(Li et al., 2019; Xu et al., 2020b; Belhadj et al., 2022)
or vision systems for product recognition (Vongbuny-
ong et al., 2017; Ding et al., 2019; Bdiwi et al., 2017).
These representation methods are used to identify the
disassembly sequence.
Considering that two agents are going to coop-
erate together to perform these tasks, it is necessary
to determine which agent should be assigned which
task. In this way, a classification of tasks is estab-
lished (Antonelli et al., 2019), generally by evaluat-
ing their difficulty, and the variability of products in-
troduces challenges in task execution, necessitating
adaptive strategies. It is also possible to group prod-
ucts and their components in a class diagram, accord-
ing to their characteristics (Jungbluth et al., 2017).
This class diagram can also be completed by the data
set of the disassembly cell (Prioli and Rickli, 2020).
3.2 Human-Robot Cooperation
Despite the manual predominance of disassembly, co-
operation aims to improve efficiency by valorizing
human flexibility, dexterity, and knowledge, com-
bined with the precision and repeatability of robots
(Matsas et al., 2017). In the context of this coop-
eration, several authors propose to classify tasks ac-
cording to their difficulty (Liao et al., 2023; Xu et al.,
2020a,b; Lou et al., 2024; Parsa et al., 2021), in order
to finally determine if the task can be performed by
the human, the robot or both. However, it is neces-
sary to take into account the capabilities and skills of
the human, as well as their needs and preferences, in
order to keep the human at the center of the process
and promote the acceptability of this approach. A list
of the added values of each agent involved in the pro-
cess has been established based on a study of the lit-
erature (Table 3). For example, Chen et al. (2022) ex-
amined the impact of robot use on ergonomics and hu-
man workload, demonstrating the benefits of the robot
for these purposes and emphasizing the importance of
understanding how humans work with the robot.
On the one hand, table 3 confirms the human ad-
vantages in terms of physical and cognitive perfor-
mance, as well as his/her added value in terms of the
adaptability required by the complexity of disassem-
bly tasks. The robot, on the other hand, is highlighted
for its operational and economic performance, as well
as the comfort it brings to humans in terms of safety
and reduced health risks. Nevertheless, it is easy to
see that more positive points emerge from the use of
the robot. It is therefore possible to envisage the im-
plementation of weighting criteria in our future stud-
ies, based on the most important added values and en-
abling us to gain efficiency.
To ensure the acceptability of human-robot coop-
eration, safety measures must be taken. In particu-
lar, it is proposed to predict the intentions and ges-
tures of the robot and the human to make coopera-
tion safer and more transparent (Hjorth et al., 2022;
Liu et al., 2023, 2019). Tian et al. (2023) go a step
further, proposing motion prediction that takes uncer-
tainties into account. The advantage lies in the fact
that ”robots can react earlier based on the knowledge
of the human behavior provided by the prediction
model” (Liu et al., 2023). Furthermore, visual recog-
nition, including methods such as point cloud recog-
nition and instance segmentation, allows the robot to
be guided by human actions, enabling it to acquire
new skills and improve its performance (Vongbuny-
ong et al., 2017; Chen et al., 2023; Renteria et al.,
2019; Bdiwi et al., 2017; Duan et al., 2023). To
prevent disturbing noise and light conditions, Huang
et al. (2021) proposed interaction via tactile contact,
force and position control. In such an environment,
knowledge and skills need to be managed. Databases
and graphs can be created to ensure the acquisition,
availability, and sharing of skills between the two
agents (Ding et al., 2019). The integration of ac-
tive compliance control, as proposed by Huang et al.
(2019) and Huang et al. (2021), enables the robot to
adapt dynamically to variations and constraints en-
countered during product handling, thus enhancing
the precision and efficiency of human-robot cooper-
ation. The robot autonomy could be further enhanced
by equipping it with the knowledge and skills of an
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
214
Table 3: Added Values of Humans and Robots.
Human Robot Papers
Adaptability, Flexi-
bility
+ - Hjorth et al. (2022); Vongbunyong et al. (2017); Huang et al. (2019); Belhadj et al. (2022); Duan et al.
(2023); Liu et al. (2019); Li et al. (2019); Jungbluth et al. (2017); Liao et al. (2023); Xu et al. (2020a,b);
Guo et al. (2023); Huang et al. (2021); Belhadj et al. (2022); Parsa et al. (2021); Mateus et al. (2018)
Cognitive, Decision
Making, Learning,
Identification
+ - Huang et al. (2019); Jungbluth et al. (2017); Prioli and Rickli (2020); Lou et al. (2024); Huang et al.
(2021)
Complexity,
Uncertainty,
Unpredictable
+ - Hjorth et al. (2022); Huang et al. (2019); Wu et al. (2024); Jungbluth et al. (2017); Liao et al. (2023);
Guo et al. (2023); Huang et al. (2021); Lee et al. (2022); Yuan et al. (2023); Parsa et al. (2021); Liu
et al. (2019)
Cost, Economy - + Li et al. (2019); Vongbunyong et al. (2017); Huang et al. (2019); Jungbluth et al. (2017); Xu et al.
(2020a,b); Guo et al. (2023); Belhadj et al. (2022); Yuan et al. (2023); Parsa et al. (2021)
Dexterity, Sensory
motor
+ - Huang et al. (2019, 2021); Liu et al. (2019)
Efficiency, Time,
Speed, Precision
- + Li et al. (2019); Huang et al. (2019); Liao et al. (2023); Xu et al. (2020a,b); Guo et al. (2023); Belhadj
et al. (2022); Duan et al. (2023); Liu et al. (2019); Prioli and Rickli (2020); Huang et al. (2021); Bdiwi
et al. (2017); Mateus et al. (2018); Lee et al. (2022); Parsa et al. (2021)
Effort, Endurance,
Fatigue, Stress
- + Li et al. (2019); Jungbluth et al. (2017); Lou et al. (2024); Bdiwi et al. (2017); Liu et al. (2019); Tian
et al. (2023)
Ergonomic, Health,
Workload
- + Li et al. (2019); Jungbluth et al. (2017); Chen et al. (2022); Lou et al. (2024)
Hazardous, Safety - + Wu et al. (2024); Huang et al. (2019); Liao et al. (2023); Prioli and Rickli (2020); Huang et al. (2021);
Lee et al. (2022); Yuan et al. (2023); Renteria et al. (2019); Duan et al. (2023); Mateus et al. (2018)
Payload, Power,
Strength
- + Huang et al. (2019); Jungbluth et al. (2017); Sartori and Schlette (2021); Huang et al. (2021); Liu et al.
(2019); Mateus et al. (2018)
Monotony,
Patience, Tedious,
Repeatability
- + Liao et al. (2023); Renteria et al. (2019); Bdiwi et al. (2017); Liu et al. (2019); Li et al. (2019); Huang
et al. (2019); Sartori and Schlette (2021); Xu et al. (2020b); Lou et al. (2024); Huang et al. (2021);
Yuan et al. (2023); Parsa et al. (2021); Duan et al. (2023)
informed software agent. This would be based on the
product model (Jungbluth et al., 2017). Data man-
agement can also be carried out via a Cloud space,
bringing together real-time disassembly information.
In particular, it connects all the agents involved in the
process, capturing human and robotic inputs to share,
diffuse, and combine the knowledge and capabilities
of each agent. Finally, this information is used to dis-
tribute tasks in real-time (Prioli and Rickli, 2020).
Again to improve acceptability, and after evoking
proposals for knowledge sharing and motion predic-
tion, Alhaji et al. (2021) explored trust factors, such
as reliability, dependability, perceived predictability,
and confidence. Indeed, ”trust is the foundation of
successful human collaboration” (Alhaji et al., 2021).
These factors are examined to enable adaptation of
the robot’s dynamic behavior. Once again, to im-
prove robot capabilities, working with a robot with
two arms will not replace the work of the human, but
will improve robot flexibility, dexterity, and the safety
of disassembly operations (Buhl et al., 2019). How-
ever, defining a robot’s capabilities in advance is chal-
lenging due to their dependence on the use case, ap-
plication, and specific robot.
Additionally, it is essential to take into account the
variability of humans and the products handled. Hu-
man factors, such as skill level, cognitive load, and
physical condition, vary from one individual to an-
other and can have a significant impact on the effi-
ciency of human-robot cooperation. Some research
has already addressed the issue of human fatigue, by
incorporating models of human fatigue into optimiza-
tion algorithms for disassembly planning (Li et al.,
2019). The integration of an HMI as an assistant to
the human could facilitate robot programming, con-
trol, and agent coordination while offering a disas-
sembly sequence. In this respect, Sartori and Schlette
(2021) proposed developing a digital twin to repre-
sent the robot and its interactions and include human
actions. In this way, the aim is to have a digital repre-
sentation of what will be physically executed.
3.3 Task Allocation
In the context of human-robot cooperation in the dis-
assembly process, optimization techniques are used
to allocate tasks between these two agents. The aim
is to maximize process efficiency while taking into
account various resource and safety criteria and con-
straints. For this purpose, various algorithms have al-
ready been developed and tested in the literature (Ta-
ble 4).
Mathematical models optimize the disassembly
sequence, aiming to minimize the total execution time
with constraints such as transition times, safety, re-
source availability, and precedence rules (Lee et al.,
2022; Antonelli et al., 2019). These criteria (time,
safety, complexity) can also be grouped together in a
utility function to maximize overall utility (Liao et al.,
2023). Recently, metaheuristics have become more
Human-Robot Cooperation in Disassembly: A Rapid Review
215
Table 4: Optimization algorithms.
Population-based
meta-heuristics
Method Criterion Papers
Swarm Intelligence
1. Bees Algorithm
2. Bees Algorithm
3. Bees Algorithm
4. Particle Swarm Opti-
mization
5. Grey Wolves Optimiza-
tion
1. Time, Human fatigue
2. Profit, Energy Consumption, Difficulty, Number of
workstations
3. Time, Cost, Difficulty
4. Time with position-related and task assignment con-
straints
5. Profit, Complexity, Ergonomics, Time
1. Li et al. (2019)
2. Xu et al. (2020a)
3. Xu et al. (2020b)
4. Chu et al. (2023)
5. Lou et al. (2024)
Evolutionary com-
putation
1. Genetic Algorithm
2. Genetic Algorithm
3. Global Search -
Multi-objective
evolutionary algorithm
1. Time, Cost
2. Non-targeted component index, Time, Operator change
3. Makespan (Time), Cost with task assignment con-
straints
1. Guo et al. (2023)
2. Parsa et al. (2021)
3. Chatzikonstantinou
et al. (2019)
commonly used, with particular emphasis on the use
of the bee algorithm. This algorithm has been partic-
ularly promoted in recent years for the quality of the
solutions it produces, its greater convergence and di-
versity, and its faster execution time, compared with
other algorithms such as the genetic algorithm, the
grey wolf algorithm, and modified teaching-learning
optimization (Xu et al., 2020a,b). However, table 4
shows that these methods are often limited to mini-
mizing time and cost. The complex problems encoun-
tered in the disassembly process would require a re-
flection on the chosen criteria, representing more the
difficulties encountered by the human, such as work-
load, and those encountered during disassembly exe-
cution, such as variability. The advantages of cooper-
ation could then be put to the fore.
For example, Belhadj et al. (2022) proposed to
take human adaptability and efficiency into account
with the generation of disassembly plans. For this,
an inference engine assigns operations to the robot if
there is no interference with the human. Based on
the total disassembly time and the part wear, several
solutions are thus proposed until the end of disassem-
bly, with the advantage of leaving a certain amount
of flexibility in the decision-making process for the
execution plan. In order to retain the strengths of
each agent and divide tasks as effectively as possi-
ble, according to a sharing mode that gives the human
a degree of autonomy throughout execution, Mateus
et al. (2018) proposed a study of manual disassembly
to decompose tasks into movements. The compati-
bility and suitability of resources is then assessed by
moving from a qualitative to a quantitative descrip-
tion (time, part, process). This approach then enables
an allocation range to be established, with greater em-
phasis on the strengths of both agents. Faced with the
vulnerability and risks associated with the uncertainty
of disassembly tasks, Yuan et al. (2023) go one step
further by proposing an assessment of resilience, tak-
ing into account stability, redundancy, efficiency, and
adaptability. Thus, by visualizing resilience indexes,
rational decision-making can be made in the alloca-
tion of tasks between the human and the robot. While
some talk about adaptability, Lee et al. (2020b) pro-
posed a finite-horizon optimization problem, based on
the principle of a predictive control model. This min-
imizes cost by taking into account human and robot
movements during task execution.
These complementary approaches enrich the field
by offering solutions tailored to the specific needs of
disassembly processes, while highlighting the impor-
tance of considering a diverse range of methods for
task allocation, taking into account process efficiency
and quality, human fatigue and safety. While some are
trying to optimize the allocation of tasks between two
agents within the same work cell, others are seeking
methods to balance entire disassembly lines, primar-
ily aimed at reducing the number of workstations, im-
proving the fluidity of the load between different hu-
mans, and reducing production time (Wu et al., 2024).
3.4 Discussions
While significant advances are being made in the
management of end-of-life electrotechnical products
and in human-robot cooperation for disassembly, gaps
remain. Product diversity requires adaptive and opti-
mal management, with analytical approaches to guide
disassembly decisions. Algorithmic task allocation
optimizes efficiency while taking into account re-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
216

source and safety constraints, but needs to incorporate
more criteria to reflect problem complexity and hu-
man willingness. The integration of human variability
is envisaged for his/her ability to adapt and make de-
cisions in variable and complex situations. Involving
humans right from the decision-making phase is cru-
cial for a more social approach to disassembly, valu-
ing their skills and combining them effectively with
those of the robot. The development of decision sup-
port systems is promising for gathering, sending and
supporting humans. To improve the efficiency and ac-
ceptability of this cooperation, it is essential to ac-
curately assess the skills required for each task, and
to foster direct communication between humans and
robots.
• H1: Defining product end-of-life, taking into ac-
count its variability, makes it easier to identify the
disassembly sequence.
• H2: Involving humans right from the decision
phase to determine the allocation of tasks, by
combining their specific skills with those of the
robots, helps to identify an optimized allocation
of functions.
• H3: Optimized allocation of disassembly tasks
between the human and the robot, taking into ac-
count a wide range of relevant criteria such as hu-
man flexibility, maximizes the efficiency of disas-
sembly operations.
• H4: A more precise assessment of the skills re-
quired for each task, and the encouragement of a
direct exchange between human and robot, will
enhance the attractiveness and human well-being.
4 COOPERATION FRAMEWORK
4.1 Definition and Application Proposal
To ensure the efficiency of human-robot cooperation
and encourage its attractiveness, it is proposed to in-
volve the human in task allocation and planning de-
cisions from the outset. A decision support system
would support this process, providing real-time feed-
back and enabling the human to use his/her skills
effectively, within his/her own limits. In this way,
it is possible to define the know-how-to-operate and
know-how-to-cooperate of both the human and the
robot for the execution of disassembly tasks. Prin-
ciples for evaluating ”Know-How-to-Operate” func-
tions (KHO) and ”Know-How-to-Cooperate” func-
tions (KHC) of agents guide the assignment of tasks
to the Human, the Robot, or both. KHO concerns the
ability to analyze and make decisions on the process,
while KHC is the ability to communicate, to decide
task allocation and build a model of the other agent.
Based on these assessments, it will be possible to al-
locate functions. In other words, ”levels of autonomy
can be identified for each capability of each agent, and
the combination of the levels of each agent defines the
levels of cooperation” (Pacaux-Lemoine et al., 2023).
On the one hand, it is crucial to highlight the impor-
tance of human adaptability in dealing with product
variability. On the other hand, robots play a crucial
role in enhancing efficiency and alleviating the human
workload.
Figure 2: Methodology.
Before setting up human-robot cooperation and
testing it through experiments, it is planned to test
manual disassembly on the one hand, and automated
disassembly on the other (Fig. 2). The aim is to as-
sess the efficiency, added values of each approach, as
well as to evaluate the disassembly tasks and their dif-
ficulty.
4.2 Expected Results
Manual disassembly aims to assess the analytical
skills of humans and their effectiveness in disassem-
bly tasks, highlighting adaptability, cognitive abili-
ties, dexterity, and flexibility. The analysis at this
stage also includes the tasks performed, the tools
used, and the difficulty and skills required for each
task. For automated disassembly, it is crucial to iden-
tify robot capabilities and limitations, focusing on
communication with the human and tasks that support
human work.
To take the added values of human and robot (Ta-
ble 3), we expect automated disassembly to be faster
and more efficient than manual disassembly, due to
the precision and repeatability of robots. However,
manual disassembly could offer greater flexibility and
adaptability to face product variability. The results of
this experiment will provide useful information on the
advantages and limitations of manual and automated
disassembly. These data can be used to guide the de-
cisions to be made when developing human-robot co-
Human-Robot Cooperation in Disassembly: A Rapid Review
217

operation. The aim is to take into account the skills
and limitations, wishes, and well-being of the human,
so as to keep him/her at the center of the process and
make his/her work more attractive after the addition
of the robot.
5 CONCLUSIONS
Although this rapid review has its limitations as a
preliminary overview, this paper addresses the persis-
tent problem of manual disassembly of electrotech-
nical devices, despite advances in autonomous sys-
tems. Efficient and optimized human-robot coopera-
tion is crucial to overcome the challenges associated
with disassembly tasks. A rapid review of the liter-
ature, focusing on human-robot cooperation in dis-
assembly, examines 38 articles, exploring the latest
methodologies. Products are generally represented by
graphs or matrices, enabling a disassembly sequence
to be defined. Tasks are then allocated according to
task difficulty and agent skills. Other proposals are
put forward to ensure safe and efficient cooperation.
In addition, several studies focus on optimizing plan-
ning and task allocation. Although this article focuses
on metaheuristics, future research could explore neu-
ral networks and reinforcement learning. By identi-
fying current gaps and outlining future research ap-
proaches, our aim is to steer human-robot cooperation
strategies toward maximizing operational efficiency
and satisfying human needs. Efficient cooperation
would combine the adaptability and cognitive abili-
ties of humans with the efficiency and assistance of
robots to lighten the workload of disassembly tasks.
Human involvement at every stage of the process is
crucial to progress towards social robotics. With this
in mind, it is useful to analyze both the human and the
robot in disassembly tasks before implementing coop-
eration. Future research will build on this initial ap-
proach by continuing the bibliographic monitoring to
ensure a comprehensive understanding of the evolv-
ing landscape of human-robot cooperation in disas-
sembly tasks.
ACKNOWLEDGEMENTS
This work is financially supported by the region
Hauts-De-France and Institut Carnot Arts.
Support of TEAM (cluster on circular economy).
REFERENCES
Alhaji, B., Prilla, M., and Rausch, A. (2021). Trust dy-
namics and verbal assurances in human robot physi-
cal collaboration. Frontiers in artificial intelligence,
4:703504.
Antonelli, D. et al. (2019). Dynamic distribution of assem-
bly tasks in a collaborative workcell of humans and
robots. FME Transactions, 47(4):723–730.
Bdiwi, M., Rashid, A., Pfeifer, M., and Putz, M. (2017).
Disassembly of unknown models of electrical vehicle
motors using innovative human robot cooperation. In
Proceedings of the Companion of the 2017 ACM/IEEE
Int. Conf. on Human-Robot Interaction, pages 85–86.
Belhadj, I., Aicha, M., and Aifaoui, N. (2022). Product dis-
assembly planning and task allocation based on hu-
man and robot collaboration. Int. J. on Interactive De-
sign and Manufacturing (IJIDeM), 16(2):803–819.
Buhl, J. F., Grønhøj, R., Jørgensen, J. K., Mateus, G., Pinto,
D., Sørensen, J. K., Bøgh, S., and Chrysostomou, D.
(2019). A dual-arm collaborative robot system for the
smart factories of the future. Procedia manufacturing,
38:333–340.
Chatzikonstantinou, I., Giakoumis, D., and Tzo-
varas, D. (2019). A new shopfloor orchestra-
tion approach for collaborative human-robot
device disassembly. In 2019 IEEE Smart-
World/SCALCOM/UIC/ATC/CBDCom/IOP/SCI,
pages 225–230. IEEE.
Chen, Y., Liao, H.-Y., Behdad, S., and Hu, B. (2023). Hu-
man activity recognition in an end-of-life consumer
electronics disassembly task. Applied Ergonomics,
113:104090.
Chen, Y., Luo, Y., Yerebakan, M. O., Xia, S., Behdad, S.,
and Hu, B. (2022). Human workload and ergonomics
during human-robot collaborative electronic waste
disassembly. In 2022 IEEE 3rd ICHMS, pages 1–6.
IEEE.
Chu, M. et al. (2023). Human-robot collaboration disassem-
bly planning for end-of-life power batteries. Journal
of Manufacturing Systems, 69:271–291.
Ding, Y., Xu, W., Liu, Z., Zhou, Z., and Pham, D. T. (2019).
Robotic task oriented knowledge graph for human-
robot collaboration in disassembly. Procedia CIRP,
83:105–110.
Duan, L., Li, J., Bao, J., Lv, J., and Zheng, H. (2023). A mr-
assisted and scene perception system for human-robot
collaborative disassembly of power batteries. In 2023
IEEE 19th Int. CASE, pages 1–8. IEEE.
Fang, Y. et al. (2023). Multi-source transfer-assisted evo-
lutionary optimization for dynamic human-robot col-
laborative disassembly planning. In 2023 Int. Conf.
on Frontiers of Robotics and Software Engineering,
pages 129–135. IEEE.
Guo, L., Zhang, Z., and Zhang, X. (2023). Human–
robot collaborative partial destruction disassembly se-
quence planning method for end-of-life product driven
by multi-failures. Advanced Engineering Informatics,
55:101821.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
218

Hjorth, S. et al. (2022). Human–robot collaboration in in-
dustrial environments: A literature review on non-
destructive disassembly. Robotics and Computer-
Integrated Manufacturing, 73:102208.
Huang, J., Pham, D. T., Li, R., Qu, M., Wang, Y., Kerin,
M., Su, S., Ji, C., Mahomed, O., Khalil, R., et al.
(2021). An experimental human-robot collaborative
disassembly cell. Computers & Industrial Engineer-
ing, 155:107189.
Huang, J., Pham, D. T., Wang, Y., Ji, C., Xu, W., Liu, Q.,
and Zhou, Z. (2019). A strategy for human-robot col-
laboration in taking products apart for remanufacture.
Fme Transactions, 47(4):731–738.
Jungbluth, J., Gerke, W., and Plapper, P. (2017). An intelli-
gent agent-controlled and robot-based disassembly as-
sistant. In IOP Conf. Series: Materials Science and
Engineering, volume 235, page 012005. IOP Publish-
ing.
Lee, M.-L., Behdad, S., Liang, X., and Zheng, M. (2020a).
Disassembly sequence planning considering human-
robot collaboration. In 2020 American Control Con-
ference, pages 2438–2443. IEEE.
Lee, M.-L., Behdad, S., Liang, X., and Zheng, M. (2020b).
A real-time receding horizon sequence planner for dis-
assembly in a human-robot collaboration setting. In
Int. S. on Flexible Automation, volume 83617, page
V001T04A004. American Society of Mechanical En-
gineers.
Lee, M.-L., Behdad, S., Liang, X., and Zheng, M. (2022).
Task allocation and planning for product disassem-
bly with human–robot collaboration. Robotics and
Computer-Integrated Manufacturing, 76:102306.
Li, K., Liu, Q., Xu, W., Liu, J., Zhou, Z., and Feng, H.
(2019). Sequence planning considering human fatigue
for human-robot collaboration in disassembly. Proce-
dia CIRP, 83:95–104.
Liao, H.-y., Chen, Y., Hu, B., and Behdad, S. (2023).
Optimization-based disassembly sequence planning
under uncertainty for human–robot collaboration.
Journal of Mechanical Design, 145(2):022001.
Liu, W., Liang, X., and Zheng, M. (2023). Task-
constrained motion planning considering uncertainty-
informed human motion prediction for human–robot
collaborative disassembly. IEEE/ASME Transactions
on Mechatronics.
Liu, Z., Liu, Q., Xu, W., Liu, Z., Zhou, Z., and Chen,
J. (2019). Deep learning-based human motion pre-
diction considering context awareness for human-
robot collaboration in manufacturing. procedia cirp,
83:272–278.
Lou, S., Zhang, Y., Tan, R., and Lv, C. (2024). A human-
cyber-physical system enabled sequential disassem-
bly planning approach for a human-robot collabora-
tion cell in industry 5.0. Robotics and Computer-
Integrated Manufacturing, 87:102706.
Mateus, J. E. C., Aghezzaf, E.-H., Claeys, D., Lim
`
ere, V.,
and Cottyn, J. (2018). Method for transition from
manual assembly to human-robot collaborative as-
sembly. IFAC-PapersOnLine, 51(11):405–410.
Matsas, E. et al. (2017). Design of a virtual reality training
system for human–robot collaboration in manufactur-
ing tasks. Int. J. on Interactive Design and Manufac-
turing (IJIDeM), 11:139–153.
Pacaux-Lemoine, M.-P., Habib, L., and Carlson, T. (2023).
Levels of cooperation in human–machine systems: A
human–bci–robot example. Handbook of Human-
Machine Systems, pages 61–69.
Parsa, S. et al. (2021). Human-robot collaboration disas-
sembly planning for end-of-life product disassembly
process. Robotics and Computer-Integrated Manufac-
turing, 71:102170.
Prioli, J. P. J. and Rickli, J. L. (2020). Collaborative robot
based architecture to train flexible automated disas-
sembly systems for critical materials. Procedia Man-
ufacturing, 51:46–53.
Renteria, A. et al. (2019). Human-robot collaboration as a
new paradigm in circular economy for weee manage-
ment. Procedia Manufacturing, 38:375–382.
Sartori, A. and Schlette, C. (2021). Visual programming of
a human-machine interface for a multi-robot support
system. In 2021 4th IEEE Int. Conf. on ICPS, pages
387–392. IEEE.
Tian, S., Liang, X., and Zheng, M. (2023). An optimization-
based human behavior modeling and prediction for
human-robot collaborative disassembly. In 2023
American Control Conference, pages 3356–3361.
IEEE.
Vongbunyong, S., Vongseela, P., and Sreerattana-aporn, J.
(2017). A process demonstration platform for product
disassembly skills transfer. Procedia CIRP, 61:281–
286.
Wu, T., Zhang, Z., Zeng, Y., Zhang, Y., Guo, L., and
Liu, J. (2024). Techno-economic and environmen-
tal benefits-oriented human–robot collaborative disas-
sembly line balancing optimization in remanufactur-
ing. Robotics and Computer-Integrated Manufactur-
ing, 86:102650.
Xu, C., Wei, H., Guo, X., Liu, S., Qi, L., and Zhao, Z.
(2020a). Human-robot collaboration multi-objective
disassembly line balancing subject to task failure via
multi-objective artificial bee colony algorithm. IFAC-
PapersOnLine, 53(5):1–6.
Xu, W., Tang, Q., Liu, J., Liu, Z., Zhou, Z., and Pham, D. T.
(2020b). Disassembly sequence planning using dis-
crete bees algorithm for human-robot collaboration in
remanufacturing. Robotics and Computer-Integrated
Manufacturing, 62:101860.
Yuan, G., Liu, X., Zhang, C., Pham, D. T., and Li, Z. (2023).
A new heuristic algorithm based on multi-criteria re-
silience assessment of human–robot collaboration dis-
assembly for supporting spent lithium-ion battery re-
cycling. Engineering Applications of Artificial Intelli-
gence, 126:106878.
Human-Robot Cooperation in Disassembly: A Rapid Review
219
