
Moving into Co-Creative Robotics
Sanaz Nikghadam-Hojjati
1 a
, Eda Marchetti
2 b
, Jose Barata
1 c
and Antonello Calabr
`
o
2 d
1
UNINOVA-CTS and LASI, Caparica, Portugal
2
Istituto di Scienza e Tecnologie dell’Informazione “A. Faedo”, CNR, Pisa, Italy
Keywords:
Industry 4.0, IoT Cybersecurity, Industry 5.0.
Abstract:
In the volatile, uncertain, complex, ambiguous (VUCA) world, robots should be able to adapt to different as-
pects of human life and create a positive impact. To achieve this, it is important to create and develop not only
technically advanced but also, from a social point of view, adaptable, autonomous, creative, collaborative, and
ethical robots. This paper introduces the concepts of Co-Creative Robotics and analyses the role of collabora-
tive networks in advancing it. Alongside introducing technological dimensions of Co-Creative Robotics, the
paper compares Co-Creative Robotics characteristics with computational creativity and traditional robotics.
Finally, to support the advancement of this field, the authors investigated the role of different categories of
collaborative networks for Co-Creative Robotics advancement.
1 INTRODUCTION
Robots have become integral components of various
aspects of human life, deeply impacting society, in-
dustry, economy, and beyond (Cai et al., 2021). They
designed for specific tasks in various domains share
common advantages such as productivity (Cresswell
et al., 2018) and reliability (Santos et al., 2021), ef-
ficiency (Leigh et al., 2020) and quality, consistency
and accuracy improvement (Fragapane et al., 2022),
assistance to humans (Narayan et al., 2022), enhance-
ment of human capabilities (Kalaitzidou and Pachidis,
2023), cost reduction through automation, and con-
tinuous operation (Mor et al., 2022). However, de-
spite the benefits that these specialized robots offer,
they also have common limitations such as rigidity
in operation, limited autonomy, lack of creative ca-
pacity, posing a challenge to current human skills
and jobs, and limited versatility and adaptability in
volatile, uncertain, complex, and ambiguous (VUCA)
environments (Javaid et al., 2021; Liu et al., 2023).
Moreover, they require specialized expertise and
have difficulty addressing complex challenges and ill-
structured problems in real-world scenarios (Wong
et al., 2018). In response to these limitations, we in-
troduce the new concept of Co-Creative Robotics for
a
https://orcid.org/0000-0002-0839-9250
b
https://orcid.org/0000-0003-4223-8036
c
https://orcid.org/0000-0002-6348-1847
d
https://orcid.org/0000-0001-5502-303X
IoT, i.e., an interdisciplinary field combining the prin-
ciples of computational creativity(Nikghadam-Hojjati
and Barata, 2019), and robotics to develop robots
able to generate human-like novel ideas, solutions,
and artistic expressions or collaborate in creative
tasks. Therefore, Co-Creative Robotics offers a trans-
formative approach to robotics research and devel-
opment, leveraging the naive concepts of creative
robotics (Hooman, 2023) to the IoT domain and open-
ing the path to new possibilities for innovation, col-
laboration, and societal impact.
By emphasizing adaptability, creativity, and inclu-
sivity, Co-Creative Robotics unlocks the way for a
future where robots play a central role in addressing
complex challenges and improving the quality of life
for human beings.
In presenting the new concepts of Co-Creative
Robotics, the following Research Questions [RQs]
have been addressed:
1. RQ1 What is Co-Creative Robotics and what are
the key differences with traditional robotics?
2. RQ2 Which is a possible technical solution to
support Co-Creative Robotics advancement?
The definition of Co-Creative Robotics and the an-
swer to the proposed RQs are based on an overview
of the most relevant literature and Focused Group
Brainstorming, which involves stating research ques-
tions, selecting participants, and setting ground rules.
Focused Group Brainstorming participants engage in
Nikghadam-Hojjati, S., Marchetti, E., Barata, J. and Calabrò, A.
Moving into Co-Creative Robotics.
DOI: 10.5220/0013000400003825
In Proceedings of the 20th International Conference on Web Information Systems and Technologies (WEBIST 2024), pages 307-314
ISBN: 978-989-758-718-4; ISSN: 2184-3252
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
307
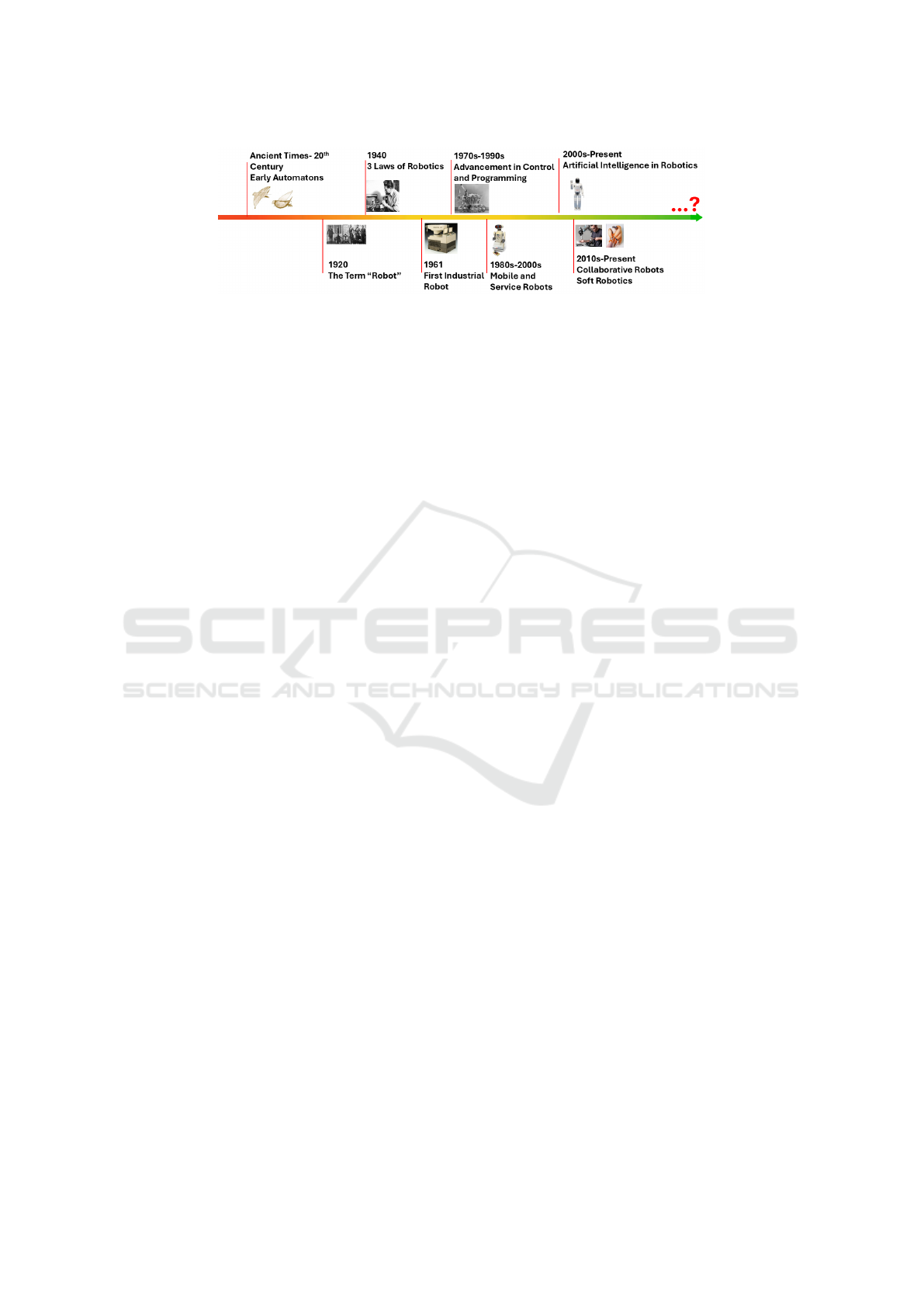
Figure 1: Main Milestones in Robotics History.
5 in-person and five online brainstorming meetings,
generating and discussing ideas. Results are anony-
mously presented to a validating group (including 8
experts), and the most effective ideas were selected in
individual meetings during the validating phase.
2 BACKGROUND
The development of the robotics field results from
human creativity and continued efforts to achieve
higher efficiency and automation in different tasks.
From ancient civilizations´ early mechanical birds,
which used steam to propel themselves (Archytas
- 350 B.C.) (Yao, 2021), until today’s cutting-edge
machines, which try to think and perform better
than humans, robotics has evolved through a series
of significant milestones (Hor
´
akov
´
a and Kelemen,
2008). These milestones, summarized in Figure 1,
not only highlight technological progress in robotics
but also underscore the potential of robots to trans-
form industries and improve the quality of human
life. However, with the evolution of technology,
real-world challenges and opportunities are also be-
coming more volatile, uncertain, complex, and am-
biguous (VUCA), which requires a change in current
robotics. Future generations of robots/cobots need
to navigate and positively contribute to diverse soci-
etal, economic, and environmental contexts and in-
teract with humans in their performance. To develop
robots with the mentioned capabilities, this paper pro-
poses integrating two emerging fields in the newly
conceived Co-Creative Robotics discipline: compu-
tational creativity (Nikghadam-Hojjati and Barata,
2019) and robotics. This interdisciplinary approach
aims to utilize computational methods and techniques
from computational creativity to model, simulate, or
enhance human creativity. It will leverage artificial in-
telligence, cognitive psychology, philosophy, and art
to study, emulate, motivate, and enhance human cre-
ativity to achieve specific goals:
• Developing models, methods, and computer-
based programs that can stimulate and enhance
human creativity without necessarily being cre-
ative themselves.
• Developing models, methods, and computer-
based programs that can generate human-level
creative ideas.
• Better studying and understanding the nature and
processes of human creativity and applying a
computer perspective on human creative behavior.
3 CO-CREATIVE ROBOTICS
DEFINITION
The proposed Co-Creative Robotics emerges as a
natural extension of this concept, where the principles
of computational creativity are applied to robotics to
create technically proficient and creatively capable
robots. In this regard, and reply to the [RQ1]:
“What is the Co-Creative Robotics, and what are the
key differences with traditional robotics?” authors
proposed the following definition as:
Co-Creative Robotics is an interdisciplinary
field that integrates computational creativity and
robotics principles to develop machines capable of
demonstrating or supporting creative behavior by
generating human-like novel ideas, solutions, and
artistic expressions or collaborating in creative tasks.
As detailed in Table 1 the Co-Creative Robotics
includes:
• Developing computational creativity-based robots
that support humans in their creative tasks and
stimulate and enhance their creative behavior
without being creative themselves.
• Developing computational creativity-based robots
that can generate human-level creative ideas,
learn, and demonstrate creative behavior from
their interacted environment.
• Understanding human creativity and collaborative
creativity from various perspectives, such as phi-
losophy, neuroscience, psychology, anatomy and
WEBIST 2024 - 20th International Conference on Web Information Systems and Technologies
308
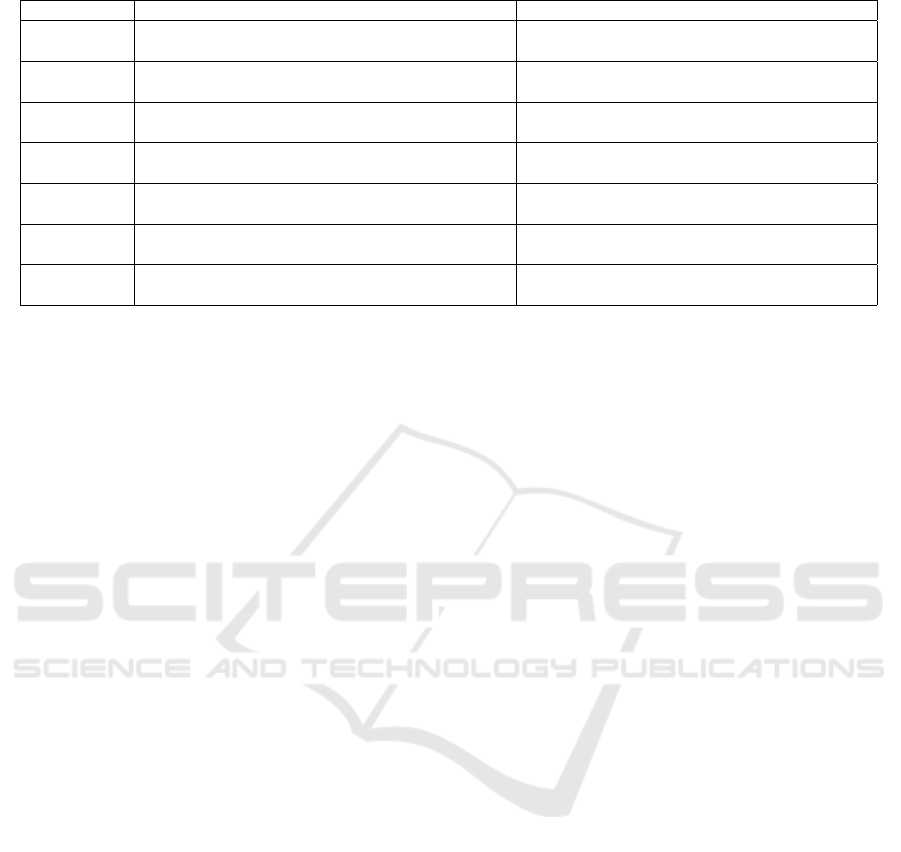
Table 1: Overview of differences within Co-Creative Robotics, Computational Creativity and Traditional Robotics.
Criteria Traditional Robotics Cocreative Robotics
Creativity
Typically, not designed for creative asks and mainly
are limited to predefined tasks and environments
Capable of generating novel solutions, ideas, and
artistic expressions independently or in collaboration
Autonomy
Often require human supervision or control and have limitations
in adaptability outside of their predefined tasks
Capable of operating autonomously in various environments
and adapt to changing conditions creatively
Physical
Capabilities
May have advanced physical capabilities
for tasks such as manipulation, navigation, or assembly
Capable of physically manipulating objects, interacting
with the environment, and expressing creative behavior
Human
Interaction
Limited ability to engage in natural interactions or understand
human emotions; Often lack social and emotional intelligence
Can engage in meaningful interactions with humans,
collaborate on creative tasks, and respond to emotional cues
Adaptability
Limited adaptability to new situations or environments
outside of predefined tasks and environments
Capable of adapting to dynamic and
uncertain environments and tasks creatively
Ethical
Considerations
Typically follow predetermined rules and algorithms
without consideration of broader ethical implications
Can consider ethical and cultural dilemmas and
make value-based judgments
Learning
Limited learning capabilities beyond predefined tasks
and environments
Capable of learning from experience and feedback
to enhance creativity over time
biology, cognitive science, and art, is essential for
studying its nature and processes.
Table 1 presents the main limitations of traditional
robotics. While Co-Creative Robotics could over-
come these limitations, even though they may have
restrictions in representing human behavior due to
physical capabilities, task complexity, and interaction
with unpredictable environments.
Figure 2 provides a schematic summary of the
technological perspectives involved in the proposed
Co-Creative Robotics discipline that can be inherited
from the Computational creativity or robotics area.
They encompass components and principles that en-
able robots to engage in creative tasks and behaviours
as the main actors or collaborators.
Just as examples, Co-Creative Robotics incorpo-
rates the computational creativity of the AI disci-
pline. AI can be used for developing algorithms,
methods, models, and computer programs that sim-
ulate or enhance human creativity, allowing robots to
produce innovative ideas, solutions, and artistic ex-
pressions (Ventura, 2019). Indeed, ML, deep learn-
ing, and Natural Language Processing (NLP) could
enable robots to autonomously learn, reason, and gen-
erate novel and appropriate ideas and solutions.
Considering Affective Computing inside the com-
putational creativity, Co-Creative Robotics can ex-
ploit the algorithms and methods enabling robots to
understand, interpret, and respond to human emo-
tions, which is fundamental Human-Computer Inter-
action HRI (Kappas and Gratch, 2023).
Moreover, ethics and cybersecurity principles in-
side computational creativity can be used by Co-
Creative Robotics to leverage ethical considerations
as robots engage in creative tasks and interact with hu-
mans (Pawlicka et al., 2022). Indeed, for Co-Creative
Robotics, it is imperative to uphold fairness, trans-
parency, and accountability throughout the creative
process while addressing privacy, safety, and societal
impact concerns.
Finally, considering the complexity of designing,
developing, and implementing Co-Creative Robotics,
it must adopt the collaborative, interdisciplinary, mul-
tidimensional, and multi-actor approaches typical of
computational creativity. By bringing together ex-
perts and involved entities from diverse fields, Co-
Creative Robotics can tackle the multifaceted VUCA
challenges and develop innovative solutions that push
the boundaries of what creative robots can achieve.
Considering instead the Robotic technical dimen-
sions, the Co-Creative Robotics can take advantage of
the sensory systems management. Indeed, cameras,
microphones, and tactile sensors can enable robots to
perceive and understand their environment and inter-
act with objects, people, and surroundings (Thuruthel
et al., 2019). Additionally, robots require algorithms
for planning, reasoning, and adapting creatively to
dynamic conditions, enabling them to make indepen-
dent decisions based on task comprehension, environ-
mental factors, and objectives (Maroto-G
´
omez et al.,
2023). The physical manifestation of robots, such
as robotic arms, hands, or humanoid bodies, plays
a pivotal role in Co-Creative Robotics by serving as
the medium through which creative outputs are ex-
pressed. Furthermore, Co-Creative Robotics inte-
grates feedback mechanisms that enable them to as-
sess and learn from their actions, refining their cre-
ative abilities over time through iterative processes.
4 COLLABORATIVE NETWORKS
FOR ADVANCEMENT
To answer the second research question, [RQ2],
the focused group brainstorming sessions were per-
formed as described in the introduction. Based on ex-
perts’ understanding and opinion and analyzing the
Moving into Co-Creative Robotics
309
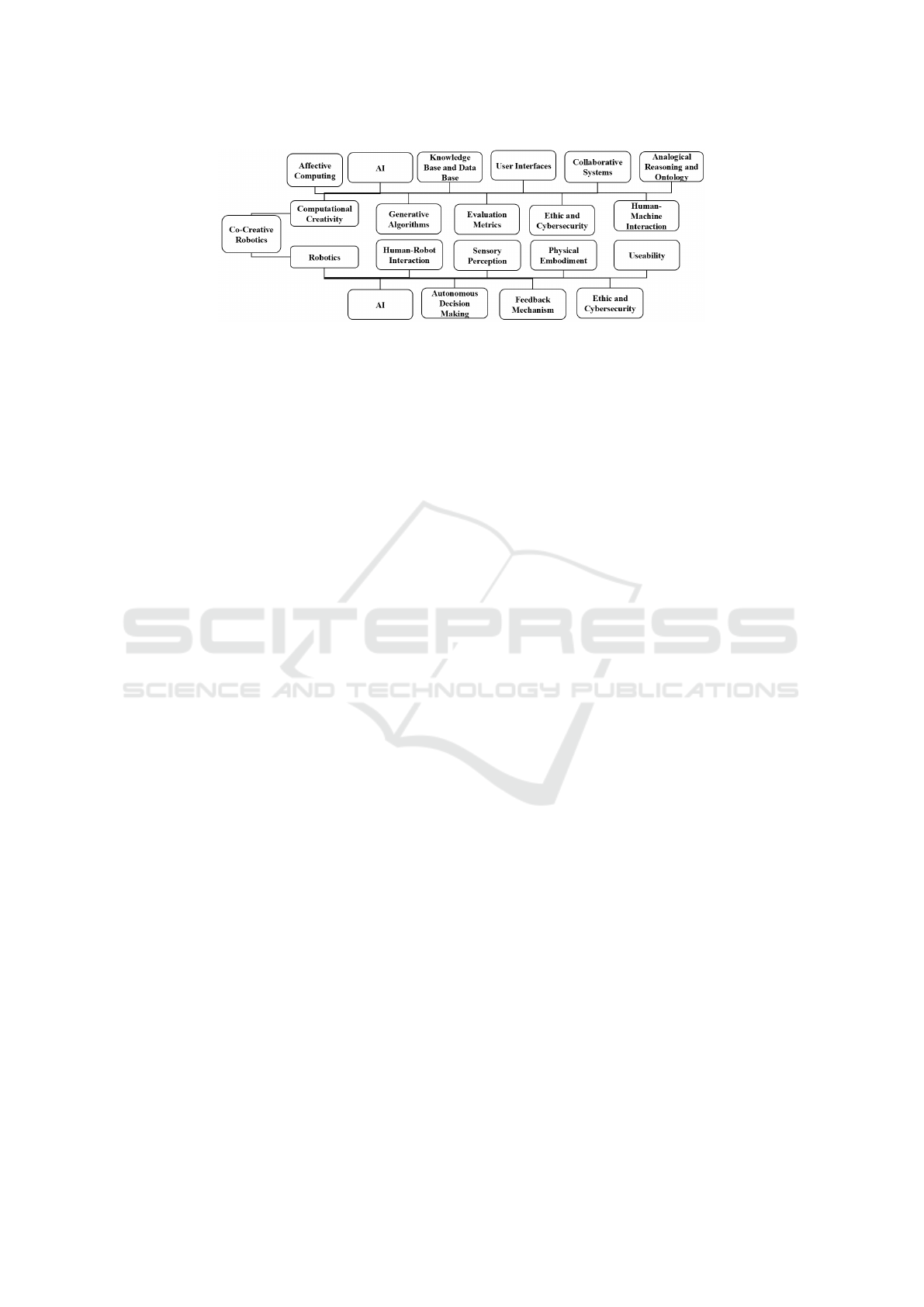
Figure 2: Main Technological Dimensions of Co-Creative Robotics.
proposals and distinct categories suggested, a com-
mon point has been identified in using collaborative
networks (CNs) (Marchetti et al., 2023). A collab-
orative network is a system of interconnected enti-
ties, such as organizations or individuals, working to-
gether to achieve common goals. It leverages shared
resources, information, and expertise to enhance per-
formance and innovation. Participants in the network
maintain autonomy while engaging in coordinated ac-
tions. The collaboration often spans across different
sectors, disciplines, and geographic locations. Effec-
tive communication and trust are critical for the suc-
cess of a collaborative network.
Thus, considering that hybridization is one
of the main characteristics of fourth (Camarinha-
Matos and Afsarmanesh, 2021) and fifth (Marchetti
et al., 2023) generations of Cs, which repre-
sent collaboration between diverse entities, we
can classify CNs based on the entities involved
into seven main categories include Human-Haman
CNs (HHCNs), Human-Machine CNs (HMCNs),
Human-Nature CNs (HNCNs), Machine-Machine
CNs (MMCNs), Machine-Nature CNs (MNCNs),
Nature-Nature CNs (NNCNs), and Human-Machine-
Nature CNs (HMNCNs)(Camarinha-Matos and Af-
sarmanesh, 2021) ( Figure 3).
In the case of Co-Creative Robotics field evo-
lution, collaboration within different types of CNs
plays a powerful catalyst that increases the rate of
advancement. Interdisciplinary, multidimensional,
multifaceted, and hybrid collaborative networks sup-
port stakeholders in addressing the requirements Co-
Creative Robotics and mitigating its advancement
challenges through contribution in many aspects such
as integrating diverse expertise, accelerating knowl-
edge sharing, pooling resources, enhancing problem-
solving capabilities, addressing ethical concerns, fos-
tering cross-disciplinary innovation, and promoting
global standards (Marchetti et al., 2023). To high-
light the role of CNs in providing a possible technical
solution to support the advancement of Co-Creative
Robotics, in the next sections, a discussion about each
of the mentioned CN categories is provided.
4.1 HHCNs
In this category of CNs, individuals or groups
of humans collaborate with other individuals or
groups to achieve common goals or solve prob-
lems (Guerrini and Yamanari, 2019). In Co-
Creative Robotics, advancement, HHCNs facilitate
interdisciplinary collaboration and knowledge ex-
change among researchers, psychologists, engineers,
artists, and other stakeholders; they contribute to a
deeper understanding of human creativity, cognitive
processes, and socio-cultural influences.
HHCNs enable AI and ML experts to cre-
ate cutting-edge algorithms and share high-quality
datasets. These networks support developing cre-
ativity evaluation metrics for robotic systems, which
consider creativity’s subjectivity and context depen-
dence. HHCNs, by involving interaction experts and
psychologists, could support enhancing human-robot
interaction (HRI). Their interdisciplinary collabora-
tion can break down barriers and coordinate efforts to
solve VUCA problems. In addition, these networks
optimize computational resources, ensure robustness
and reliability, and handle scalability issues.
They promote transparency in models, address
ethical concerns, and ensure cultural sensitivity by in-
tegrating diverse perspectives.
Involving legal and policy experts, regulatory
frameworks could be developed, and IP challenges
could be navigated. Furthermore, by leveraging col-
lective strengths, HHCNs can effectively address the
multifaceted challenges in Co-Creative Robotics, fos-
tering innovation and responsible practice.
4.2 HMCNs
HMCNs involve collaboration between humans and
machines or AI systems (Kattel et al., 2020). In
these networks, humans interact with machines to
perform tasks, share information, or achieve specific
WEBIST 2024 - 20th International Conference on Web Information Systems and Technologies
310

Figure 3: Categorization of Collaborative Networks based on the Involved Entities.
objectives, often combining human creativity, intu-
ition, and decision-making with machine efficiency
and computational power.
HMCNs can significantly advance Co-Creative
Robotics by facilitating synergistic interactions be-
tween humans and machines. They facilitate the in-
tegration of diverse cognitive, emotional, and socio-
cultural perspectives to enhance models of human cre-
ativity and, by combining human creativity with ma-
chine efficiency, develop innovative algorithms for
VUCA problems. These networks facilitate balanc-
ing subjective human insights with objective machine
analysis to create comprehensive creativity evaluation
metrics for Co-Creative Robotics systems.
HMCNs, by enhancing communication and im-
proving understanding, foster the trustworthiness and
reliability of human-robot collaboration and inter-
action. They facilitate and enhance the collection
and sharing of creative data, qualitative and diverse
dataset development, and promote knowledge ex-
change and resource management through support-
ing interdisciplinary collaboration, increasing inter-
operability, and standardization. Interpretability and
explainability are improved through transparent com-
munication, making machine outputs understandable
and culturally relevant.
HMCNs optimize computational resources by as-
signing tasks based on the strengths of both humans
and machines. They enhance robustness and relia-
bility by combining human oversight with machine
precision, and improve scalability for handling larger
datasets and VUCA tasks.
Ethical concerns can be addressed by incorporat-
ing human values into robotic system design and de-
ployment. HMCNs ensure cultural sensitivity by in-
volving diverse human inputs. In addition, HMCNs
can potentially improve public and user acceptance
by creating user-friendly and culturally relevant cre-
ative robots. They also can promote the utilization
of sustainable materials by combining human exper-
tise in sustainability with machine capabilities. HM-
CNs facilitate IP protection by establishing and dis-
seminating clear guidelines for ownership and author-
ship, and benefit regulatory framework development
through interdisciplinary collaboration.
4.3 HNCNs
In HNCNs, humans collaborate with natural ele-
ments, such as ecosystems, animals, or natural phe-
nomena (Kluger et al., 2020). They may involve
studying nature for inspiration, working with natural
processes to address environmental challenges, or in-
tegrating nature into human-designed systems.
To advance Co-Creative Robotics, HNCNs have
the potential to integrate diverse human perspectives
with natural models of creativity observed in biolog-
ical systems and enhance our understanding of cre-
ativity to the development of innovative algorithms.
By taking inspiration from nature, HNCNs facili-
tate the creation of comprehensive creativity evalua-
tion metrics, improve human-robot collaboration, and
optimize data collection. They also foster interdis-
ciplinary collaboration, optimize computational re-
sources, and enhance creative robotic systems’ ro-
bustness, reliability, and scalability.
HNCNs can improve interpretability and explain-
ability by using natural analogies to make machine
outputs more comprehensible. They can support ad-
dressing ethical concerns by incorporating human val-
ues and natural principles, ensuring cultural sensi-
tivity, and fostering public acceptance through user-
friendly and culturally relevant robots. In addition,
HNCNs promote sustainable materials and support
the development of regulatory frameworks to ensure
responsible innovation. Furthermore, they help estab-
lish clear guidelines for intellectual property protec-
tion, ensuring fair and transparent practices.
Moving into Co-Creative Robotics
311

4.4 MMCNs
MMCNs involve collaboration among different ma-
chines, including intelligent autonomous systems, to
accomplish tasks or solve problems. These networks
often rely on machine-to-machine communication,
data sharing, and coordinated actions to achieve com-
mon objectives efficiently (N
´
obrega et al., 2023).
MMCNs provide a multifaceted approach to ad-
dress the diverse challenges of advancing Co-Creative
Robotics. By harnessing distributed computing
power, MMCNs facilitate a deeper understanding of
human creativity by aggregating and analysing large
amounts of data from various sources. They enable
the development of complex algorithms that navigate
VUCA problem spaces while balancing novelty and
appropriateness in creative outputs.
Moreover, MMCNs support enhancing human-
robot collaboration by improving communication,
adaptability, and trust through seamless interaction
and intuitive interfaces. By pooling resources and
automating data processing, MMCNs mitigate data
availability and quality limitations, supporting the de-
velopment of robust and generalizable Co-Creative
Robotics systems.
MMCNs also optimize computational resource
usage, ensure scalability, and enhance interpretabil-
ity and explainability, addressing ethical concerns and
promoting cultural sensitivity. By fostering public ac-
ceptance and regulatory compliance, MMCNs facili-
tate the responsible and sustainable integration of Co-
Creative Robotics into various fields, ensuring relia-
bility, safety, and adherence to ethical standards.
4.5 MNCNs
in MNCNs, collaboration happens between machines
and elements of the natural world. These networks
may include deploying machines for environmen-
tal monitoring, utilizing nature-inspired design prin-
ciples in machine engineering, or developing tech-
nologies to work harmoniously with natural ecosys-
tems (Camarinha-Matos and Afsarmanesh, 2018).
MNCNs, by integrating machine intelligence with
insights from the natural world, can provide novel
solutions to VUCA problems. They can leverage
biomimicry to simulate creative processes observed
in nature, such as the collective intelligence of social
insect colonies or the adaptive problem-solving strate-
gies of animals. MNCNs can draw inspiration from
ecological systems, where complex interactions lead
to emergent behaviors.
Moreover, they address Data Limitations chal-
lenges by employing bio-inspired data collection and
processing techniques. MNCNs can also serve as
platforms for integrating expertise from diverse fields,
mirroring the interconnectedness of ecosystems.
Furthermore, MNCNs contribute to ”Scalability”
by leveraging principles of self-organization and scal-
ability observed in natural systems. They can take
inspiration from natural systems’ ability to adapt to
changing environments and stakeholder feedback.
4.6 NNCNs
NNCNs represent CNs where elements of the natural
world (including humans) collaborate (Camarinha-
Matos and Afsarmanesh, 2018). These networks en-
compass interactions and relationships between dif-
ferent components of ecosystems, ecological pro-
cesses, or natural phenomena, contributing to the
functioning and resilience of natural systems.
Through observation of processes and outcomes
of NNCNs, Co-Creative Robotics field experts can
take inspiration from observed principles in natural
systems to develop innovative solutions to different
challenges and requirements of this field. For in-
stance, insights from biological systems can support
robotic system designers to design and develop more
adaptive and resilient robotic algorithms by replicat-
ing how different natural organisms respond to envi-
ronmental changes.
Additionally, NNCNs can facilitate interdisci-
plinary collaboration by bringing together biology,
engineering, and computer science experts to ex-
change ideas and develop novel approaches to Co-
Creative Robotics. Moreover, NNCNs can contribute
to developing more sustainable and environmentally
friendly robotic systems by incorporating principles
of biomimicry and utilizing eco-friendly materials
and energy sources.
4.7 HMNCNs
HMNCNs integrate collaboration between humans,
machines, and natural elements. They leverage hu-
man creativity, machine intelligence and efficiency,
and natural processes to address VUCA challenges
and requirements, promote sustainability, or enhance
society’s and the environment’s well-being (Zhuge,
2020).
This complex category, which integrates human
expertise, ML algorithms, and insights from natu-
ral systems, addresses key challenges across various
fronts. From understanding the complexity of hu-
man creativity to navigating algorithmic challenges,
HMNCNs leverage interdisciplinary collaboration to
develop innovative solutions. These networks facili-
WEBIST 2024 - 20th International Conference on Web Information Systems and Technologies
312

tate robust human-robot collaboration, improve data
collection and sharing, optimize computational re-
sources, and enhance the interpretability and reliabil-
ity of Co-Creative Robotics systems.
Moreover, HMNCNs foster ethical considera-
tions, cultural sensitivity, and public acceptance by
engaging diverse stakeholders and aligning with soci-
etal values. Promoting sustainability, regulatory com-
pliance, and intellectual property protection ensures
responsible and ethical innovation in the field of Co-
Creative Robotics. HMNCNs harness the collective
intelligence, creativity, and adaptability of humans,
machines, and natural systems to drive progress and
overcome the complex challenges in advancing Co-
Creative Robotics.
5 CONCLUSION AND FUTURE
WORKS
The current generation of robotic systems is required
to operate in VUCA environments and solve VUCA
problems. These dynamic and unpredictable condi-
tions demand robots to possess high adaptability, au-
tonomy, creativity, interaction, and decision-making
skills. We can significantly improve robots’ per-
formance and reliability in tackling complex real-
world challenges by developing robots with these ad-
vanced capabilities. For such, this paper presented a
conceptual expansion research work that investigated
the historical background, nature, characteristics, and
technological dimensions of Co-Creative Robotics, as
well as the difference between traditional robotics and
Co-Creative Robotics. The authors showed that tradi-
tional robots are mainly designed for specific tasks in
controlled settings, struggle to adapt to dynamic and
unpredictable conditions, and lack the autonomy and
creativity necessary for innovation.
A new paradigm of Co-Creative Robotics through
integrating computational creativity with robotics
principles has emerged to address these limitations.
Co-Creative Robotics can generate novel ideas, so-
lutions, behaviour, and artistic expressions indepen-
dently or in collaboration with humans. This inter-
disciplinary field incorporates AI, affective comput-
ing, sensory perception, and HRI technologies to em-
power robots with creativity, adaptability, and ethical
decision-making capabilities. Co-Creative Robotics,
by adopting a collaborative and multidimensional ap-
proach involving experts from various fields, aims to
overcome the challenges of VUCA environments and
push the boundaries of what robots can achieve in
diverse contexts. Inspired by the role of collabora-
tion in life evolution, it has been considered a valu-
able approach in advancing Co-Creative Robotics.
In this regard, the authors answered the second re-
search question of this work, which investigates the
role of CNs in Co-Creative Robotics advancement.
The authors proposed a new categorization of CNs
based on the involved entities, including human-
human, human-machine, human-nature, machine-
machine, machine-nature, nature-nature, and human-
machine-nature CNs.
Based on this categorization, experts propose pos-
sible roles and impacts of CNs during several focused
group brainstorming sessions. CNs’ contributions to
Co-Creative Robotics advancement include facilitat-
ing interdisciplinary collaboration, knowledge shar-
ing, resource pooling, problem-solving, and address-
ing ethical considerations. These networks enable the
integration of diverse perspectives and expertise to ad-
dress the challenges of Co-Creative Robotics, foster-
ing innovation, reliability, and responsible practice.
Future research in the field of Co-Creative
Robotics has significant potential for advancing the
capabilities and applications of robotic systems. One
area for future exploration is developing the inter-
disciplinary nature of Co-Creative Robotics by inte-
grating insights from cognitive science, neuroscience,
psychology, and design. Also, research could focus
on better adaptability and resilience of Co-Creative
Robotics to navigate VUCA environments effectively.
Also, innovative approaches to ML, sensor tech-
nologies, and decision-making algorithms that enable
robots real-time learning and adaptation are needed.
Furthermore, ethical and societal implications of Co-
Creative Robotics, including privacy, autonomy, and
the impact on human well-being, are investigable.
In CNs, it is important to conduct empirical studies
to examine how various collaborative network con-
figurations impact the development and implemen-
tation of creative robotic systems. Additionally, de-
veloping frameworks or methodologies for establish-
ing and managing CNs in the context of Co-Creative
Robotics, including strategies for building trust, fos-
tering communication, and aligning goals among di-
verse stakeholders, are required.
ACKNOWLEDGEMENTS
This work was funded by the Portuguese “Fundac¸
˜
ao
para a Ci
ˆ
encia e Tecnologia” through “Strategic pro-
gram UIDB/00066/2020” (UNINOVA-CTS).
Moving into Co-Creative Robotics
313

REFERENCES
Cai, X., Ning, H., Dhelim, S., Zhou, R., Zhang, T., Xu, Y.,
and Wan, Y. (2021). Robot and its living space: A
roadmap for robot development based on the view of
living space. Digital Communications and Networks,
7(4):505–517.
Camarinha-Matos, L. M. and Afsarmanesh, H. (2018).
Roots of collaboration: nature-inspired solutions for
collaborative networks. IEEE Access, 6:30829–
30843.
Camarinha-Matos, L. M. and Afsarmanesh, H. (2021). The
evolution path to collaborative networks 4.0. Ad-
vancing Research in Information and Communication
Technology: IFIP’s Exciting First 60+ Years, Views
from the Technical Committees and Working Groups,
pages 170–193.
Cresswell, K., Cunningham-Burley, S., and Sheikh, A.
(2018). Health care robotics: qualitative exploration
of key challenges and future directions. Journal of
medical Internet research, 20(7):e10410.
Fragapane, G., Ivanov, D., Peron, M., Sgarbossa, F., and
Strandhagen, J. O. (2022). Increasing flexibility and
productivity in industry 4.0 production networks with
autonomous mobile robots and smart intralogistics.
Annals of operations research, 308(1):125–143.
Guerrini, F. M. and Yamanari, J. S. (2019). A systematic re-
view of collaborative networks: implications for sens-
ing, smart and sustainable enterprises. In Collabora-
tive Networks and Digital Transformation: 20th IFIP
WG 5.5 Working Conference on Virtual Enterprises,
PRO-VE 2019, Turin, Italy, September 23–25, 2019,
Proceedings 20, pages 69–80. Springer.
Hooman, S. (2023). Creative Robotics. Colour Edition.
Hor
´
akov
´
a, J. and Kelemen, J. (2008). The robot story: why
robots were born and how they grew up.
Javaid, M., Haleem, A., Singh, R. P., and Suman, R. (2021).
Substantial capabilities of robotics in enhancing i4.0
implementation. Cognitive Robotics, 1:58–75.
Kalaitzidou, M. and Pachidis, T. P. (2023). Recent robots in
steam education. Education Sciences, 13(3):272.
Kappas, A. and Gratch, J. (2023). These aren’t the droids
you are looking for: Promises and challenges for the
intersection of affective science and robotics/ai. Affec-
tive Science, 4(3):580–585.
Kattel, R., Lember, V., and T
˜
onurist, P. (2020). Collabora-
tive innovation and human-machine networks. Public
management review, 22(11):1652–1673.
Kluger, L. C., Gorris, P., Kochalski, S., Mueller, M. S., and
Romagnoni, G. (2020). Studying human–nature re-
lationships through a network lens: A systematic re-
view. People and Nature, 2(4):1100–1116.
Leigh, N. G., Kraft, B., and Lee, H. (2020). Robots, skill
demand and manufacturing in us regional labour mar-
kets. Cambridge Journal of Regions, Economy and
Society, 13(1):77–97.
Liu, J., Wang, Z., Qian, L., Luo, R., and Luo, X. (2023).
Task-oriented systematic design of a heavy-duty elec-
trically actuated quadruped robot with high perfor-
mance. Sensors, 23(15):6696.
Marchetti, E., Nikghadam-Hojjati, S., and Barata, J. (2023).
Collaborative network 5.0: By design human values
and human-centred based extended collaborative net-
works. In Working Conference on Virtual Enterprises,
pages 415–430. Springer.
Maroto-G
´
omez, M., Castro-Gonz
´
alez,
´
A., Malfaz, M.,
and Salichs, M.
´
A. (2023). A biologically inspired
decision-making system for the autonomous adaptive
behavior of social robots. Complex & Intelligent Sys-
tems, 9(6):6661–6679.
Mor, R. S., Kumar, D., Singh, A., and Neethu, K. (2022).
Robotics and automation for agri-food 4.0: Innovation
and challenges. In Agri-food 4.0: Innovations, chal-
lenges and strategies, pages 189–199. Emerald Pub-
lishing Limited.
Narayan, S., Aquif, M., Kalim, A. R., Chagarlamudi, D.,
and Harshith Vignesh, M. (2022). Search and re-
connaissance robot for disaster management. In Ma-
chines, Mechanism and Robotics: Proceedings of iN-
aCoMM 2019, pages 187–201. Springer.
Nikghadam-Hojjati, S. and Barata, J. (2019). Computa-
tional creativity to design cyber-physical systems in
industry 4.0. In Collaborative Networks and Digi-
tal Transformation: 20th IFIP WG 5.5 Working Con-
ference on Virtual Enterprises, PRO-VE 2019, Turin,
Italy, September 23–25, 2019, Proceedings 20, pages
29–40. Springer.
N
´
obrega, L., Marchhausen, L., Martinez, L. F., Lima, Y.,
Almeida, M., Lyra, A., Barbosa, C. E., and Moreira de
Souza, J. (2023). Ai delphi: Machine-machine collab-
oration for exploring the future of work. Available at
SSRN 4660589.
Pawlicka, A., Pawlicki, M., Kozik, R., and Chora
´
s, M.
(2022). Human-driven and human-centred cybersecu-
rity: policy-making implications. Transforming Gov-
ernment: People, Process and Policy, 16(4):478–487.
Santos, N. B., Bavaresco, R. S., Tavares, J. E., Ramos, G.
d. O., and Barbosa, J. L. (2021). A systematic map-
ping study of robotics in human care. Robotics and
Autonomous Systems, 144:103833.
Thuruthel, T. G., Shih, B., Laschi, C., and Tolley, M. T.
(2019). Soft robot perception using embedded soft
sensors and recurrent neural networks. Science
Robotics, 4(26):eaav1488.
Ventura, D. (2019). Autonomous intentionality in compu-
tationally creative systems. Computational creativity:
The philosophy and engineering of autonomously cre-
ative systems, pages 49–69.
Wong, C., Yang, E., Yan, X.-T., and Gu, D. (2018). Au-
tonomous robots for harsh environments: a holistic
overview of current solutions and ongoing challenges.
Systems Science & Control Engineering, 6(1):213–
219.
Yao, B. (2021). International research collaboration: chal-
lenges and opportunities. Journal of Diagnostic Med-
ical Sonography, 37(2):107–108.
Zhuge, H. (2020). Cyber-physical-social intelligence.
Cyber-Physical-Social Intelligence.
WEBIST 2024 - 20th International Conference on Web Information Systems and Technologies
314
