
Explaining Explaining
Sergei Nirenburg
1
, Marjorie McShane
1
, Kenneth W. Goodman
2
and Sanjay Oruganti
1
1
Department of Cognitive Science, Rensselaer Polytechnic Institute, 110 8
th
St. Troy, NY 12180-3590, U.S.A.
2
Institute for Bioethics and Health Policy, Miller School of Medicine, University of Miami,
P.O. Box 016960 (M-825) Miami, FL 33101, U.S.A.
Keywords: Explanation, Explainable AI, Cognitive Modeling.
Abstract: Explanation is key to people having confidence in high-stakes AI systems. However, machine-learning-based
systems – which account for almost all current AI – can’t explain because they are usually black boxes. The
explainable AI (XAI) movement hedges this problem by redefining “explanation”. The human-centered
explainable AI (HCXAI) movement identifies the explanation-oriented needs of users but can’t fulfill them
because of its commitment to machine learning. In order to achieve the kinds of explanations needed by real
people operating in critical domains, we must rethink how to approach AI. We describe a hybrid approach to
developing cognitive agents that uses a knowledge-based infrastructure supplemented by data obtained
through machine learning when applicable. These agents will serve as assistants to humans who will bear
ultimate responsibility for the decisions and actions of the human-robot team. We illustrate the explanatory
potential of such agents using the under-the-hood panels of a demonstration system in which a team of
simulated robots collaborates on search task assigned by a human.
1 INTRODUCTION
Explanation is clearly one of Marvin Minsky’s
“suitcase” words “that we use to conceal the
complexity of very large ranges of different things
whose relationships we don’t yet comprehend”
(Minsky, 2006, p. 17). The Stanford Encyclopedia of
Philosophy (https://plato.stanford.edu/) includes
detailed entries on mathematical, metaphysical, and
scientific explanation, and a separate one on causal
approaches to the latter. Specialist philosophical
literature discusses Carl Hempel’s (1965) deductive-
nomological model of explanation and the rival
inductive-statistical approaches. Explanation is also
discussed in other disciplines, such as psychology
(e.g., Lombrozo, 2010). Special attention is also paid
to the differences between explainability,
interpretability, transparency, explicitness, and
faithfulness (e.g., Rosenfeld & Richardson, 2019).
Recent years have also seen a pronounced interest in
developing novel theories of explanation (Yang,
Folke, & Shafto, 2022; Rizzo et al., 2023).
Explanation in AI has a long history as well.
Arguably the first AI-related contribution was Craik
(1943). Kenneth Craik was a psychologist and an
early cyberneticist whose work influenced AI and
cognitive science (Boden, 2006, pp. 210-218). His
book, entitled “The Nature of Explanation,” discusses
a variety of the senses of this suitcase word and,
among other things, stresses the distinction between
causal explanation in terms of a formal world model
(what would later be termed ontology) and statistical
explanation, which seeks to explain by pointing out
uninterpreted relations among observable entities.
The above distinction still remains in the spotlight
today. Most current generative AI systems are black
boxes whose functioning cannot be explained in
normal human terms. For certain applications, this is
not a problem:
1. Non-critical AI capabilities – such as GPS
systems, machine translation systems, and
search engines – are widely and happily
employed by end users who don’t require
explanations.
2. AI capabilities that emulate physical rather than
cognitive capabilities – such as robotic movement
and speech recognition – are incompatible with
the kinds of user-elucidating explanations we
address here. That is, we all understand that it
would be pointless to ask a robot exactly how it
extends its arm or keeps its balance when walking
on uneven surfaces.
116
Nirenburg, S., McShane, M., Goodman, K. W. and Oruganti, S.
Explaining Explaining.
DOI: 10.5220/0013000600003886
In Proceedings of the 1st International Conference on Explainable AI for Neural and Symbolic Methods (EXPLAINS 2024), pages 116-123
ISBN: 978-989-758-720-7
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
3. AI systems that emulate cognitive
capabilities (e.g., X-ray analysis systems)
can be useful, despite their lack of
explainability, as long as they are leveraged
as orthotic assistants rather than autonomous
systems. This requires that domain experts
understand the reliability and deficits of the
technology well enough to judiciously
incorporate it into their workflow (Chan &
Siegel, 2019; Nirenburg, 2017).
By contrast, lack of explainability is a problem for
ML-based AI systems that are designed to operate
autonomously in critical domains. For example, as of
June 2021, the FDA cleared 343 AI/ML-based
medical devices, with over 80% of clearances
occurring after 2018 (Matzkin, 2021). This supply of
new AI systems has continued unabated even though
their adoption has been less than enthusiastic. Fully
70% of these devices offer radiological diagnostics
and typically claim to exceed the precision and
efficiency of humans. But, according to Gary Marcus
(2022), as of March 2022, “not a single radiologist
has been replaced.” So, regulators keep approving
systems whose operation cannot be explained, and
developers keep hoping that their systems, though
unexplainable, will be adopted. (For further
discussion, see McShane, Nirenburg, & English,
2024, Section 2.7.1.)
The unexplainability problem has been addressed
in earnest by the Explainable-AI (XAI) movement
(Finzel et al., 2023; Bodria et al., 2021; Cambria et al.,
2022; Nagahisarchoghaei et al., 2023; Schwalbe &
Finzel, 2024), but the results are, in general, less than
satisfying (Barredo et al., 2020). XAI investigators
hedge the explainability problem by redefining
“explanation” (Gunning, 2017; Mueller et al., 2019).
XAI research does not seek to explain how systems
arrived at their output. Instead, it concentrates on
“post hoc algorithmically generated rationales of
black-box predictions, which are not necessarily the
actual reasons behind those predictions or related
causally to them... [and which] are unlikely to
contribute to our understanding of [a system’s] inner
workings” (Babic et al., 2021).
The related human-centered explainable AI
(HCXAI) movement, for its part, identifies the
explanation-oriented needs of users but is hampered
in fulfilling them because of its commitment to
machine learning (Babic et al., 2021; Ehsan et al.,
2022; Liao & Varshney, 2022).
The solution to the problem of unexplainable ML-
based AI is not to keep trying to square that circle:
generative AI techniques are, and will remain,
unexplainable. The solution is to step back and
reconsider how to develop AI systems so that they are
explainable to the degree, and in the ways, that are
necessary for different types of applications.
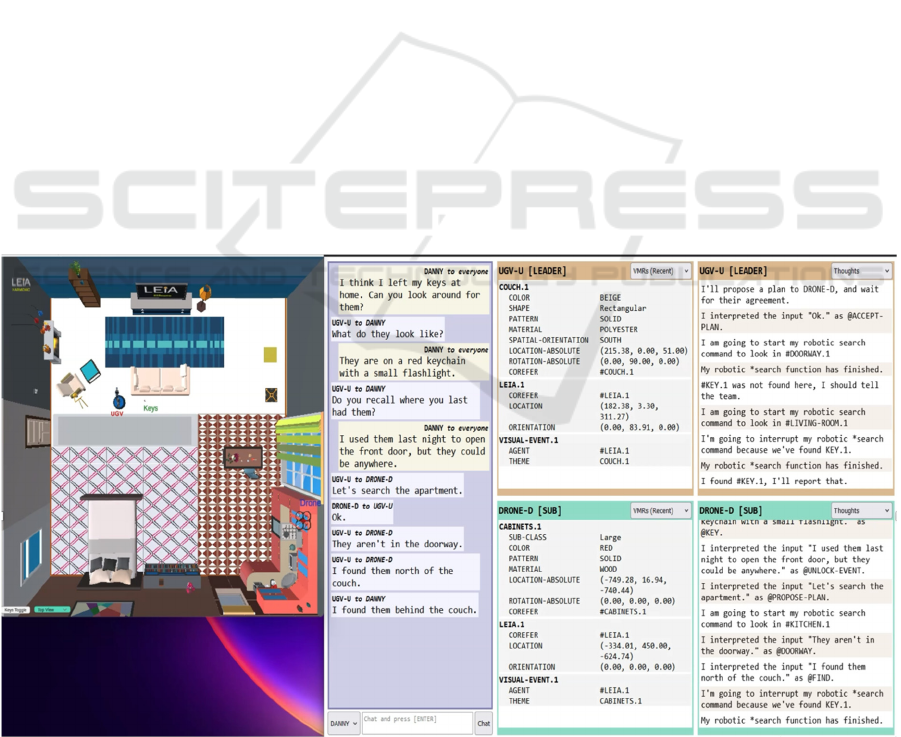
Figure 1: The demonstration view of the robotic search-and-retrieve system at the end of the system run. The simulation
window is to the left, the dialog window is in the middle, and four of many available under-the-hood panels are to the right.
This figure is intended only to show the look-and-feel of the system; subsequent figures of individual components will be
legible.
Explaining Explaining
117

Intelligent behavior by humans and AI agents
involves a variety of different capabilities of
perception, reasoning, decision-making, and action.
Some of them are arguably better fit to be
implemented using generative AI approaches, some
others, by symbolic AI approaches. Therefore, hybrid
AI systems are better suited for comprehensive (non-
silo) applications than either of the above approaches
alone. This observation was first made over 60 years
ago (Minsky, 1961) and has finally received due
attention in the field. Indeed, hybrid “neurosymbolic”
AI architectures are at present one of the foci of work
in AI (Hitzler et al., 2023).
Our team is developing a family of hybrid
cognitive systems that we call LEIAs: Language-
Endowed Intelligent Agents. Our work is a part of the
movement toward integrating empirical (deep
learning-based) and deductive/rational (knowledge-
based) approaches to building intelligent agent
systems. Explanation is an important component of
such systems (de Graaf et al., 2021).
We believe that explanations are needed, first and
foremost, for those aspects of agent functioning that
end users want to be explained, so that they will come
to trust their agent collaborators. (Granted,
explanations are also useful for AI developers. But
enhancing the efficiency of system development is a
different concern from supplying systems with
essential explanatory capabilities.) It follows that
generative AI methods are most useful for
implementing system modules that don’t need to be
explained, such as motor control and uninterpreted
perception. For any process that requires explainable
reasoning (perception interpretation, decision-
making, action specification, etc.), and for any
application where confidence in system output is
important, black-box methods, such as large language
models (LLM), are not a good fit. Accordingly,
LEIAs use LLMs whenever this simplifies or speeds
up work on tasks that do not require explanation or
for which errors will not undermine the reliability of
agent behavior.
In what follows we briefly illustrate some of the
explanatory capabilities of LEIAs.
2 LEIAs
The LEIA program of R&D is a theoretically
grounded, long-term, effort that has two main
emphases: developing cognitive robotic systems
whose capabilities extend beyond what machine
learning alone can offer, and earning people’s trust in
those systems through explainability (McShane,
Nirenburg, & English, 2024).
LEIAs are implemented in a dual-control
cognitive-robotic architecture that integrates
strategic, cognitive-level decision-making with
tactical, skill-level robot control (Oruganti et al.,
2024). The strategic (cognitive) layer relies primarily
on knowledge-based computational cognitive
modeling for interpreting perceptive inputs,
reasoning, decision-making, learning, etc. The
tactical (robotic, skill-level) module relies on data-
driven tools for recognizing perceptive inputs and
rendering actions.
LEIAs can explain their operation because they
are configured using human-inspired computational
cognitive modeling. Their explanations make clear
the relative contributions of symbolic and data-driven
methods, which is similar to a human doctor
explaining a recommended procedure using both
causal chains, such as how the procedure works, and
population-level statistics, such as the percentage of
patients for whom it is curative.
3 EXPLANATION VIA
UNDER-THE-HOOD PANELS
As detailed in McShane, Nirenburg, and English
(2024, chapter 8, “Explaining”), there are many
things that a LEIA can explain (what it knows, how it
interpreted an input, why it made a given decision,
etc.) and there are many ways to present explanations
to people. Although the most obvious way is through
language, other expressive means can be even more
useful in some contexts. One such way is by
dynamically showing traces of system operation
using what we call under-the-hood panels.
We first introduced under-the-hood panels in the
Maryland Virtual Patient (MVP) proof-of-concept
clinician training application (McShane et al., 2008;
McShane & Nirenburg, 2021). There, the under-the-
hood panels showed traces of the physiological
simulation of the virtual patient, the patient’s
interoception, its thoughts, the knowledge it learned,
and how it interpreted text inputs from the user, who
was playing the role of attending physician. These
insights into system functioning were geared toward
earning the trust of medical educators, who would
ultimately need to choose to incorporate such a
system into their pedagogical toolbox.
EXPLAINS 2024 - 1st International Conference on Explainable AI for Neural and Symbolic Methods
118
3.1 A Search-and-Retrieve Request
We will illustrate the explanatory power of under-the-
hood panels using a new system (Oruganti et al.,
2024; Oruganti et al., submitted) in which two
simulated robots, a drone and a ground vehicle, work
as a team to fulfill a search-and-retrieve request by a
person (Figure 1). A human named Danny, who is
located remotely, asks the team of robots – a drone
and ground vehicle (UGV) – to find keys that he lost
in his apartment. Danny communicates with the
UGV, since it is serving as the robotic team leader
with the drone as its subordinate. The full dialog,
which we’ll walk through, is shown in Figure 2.
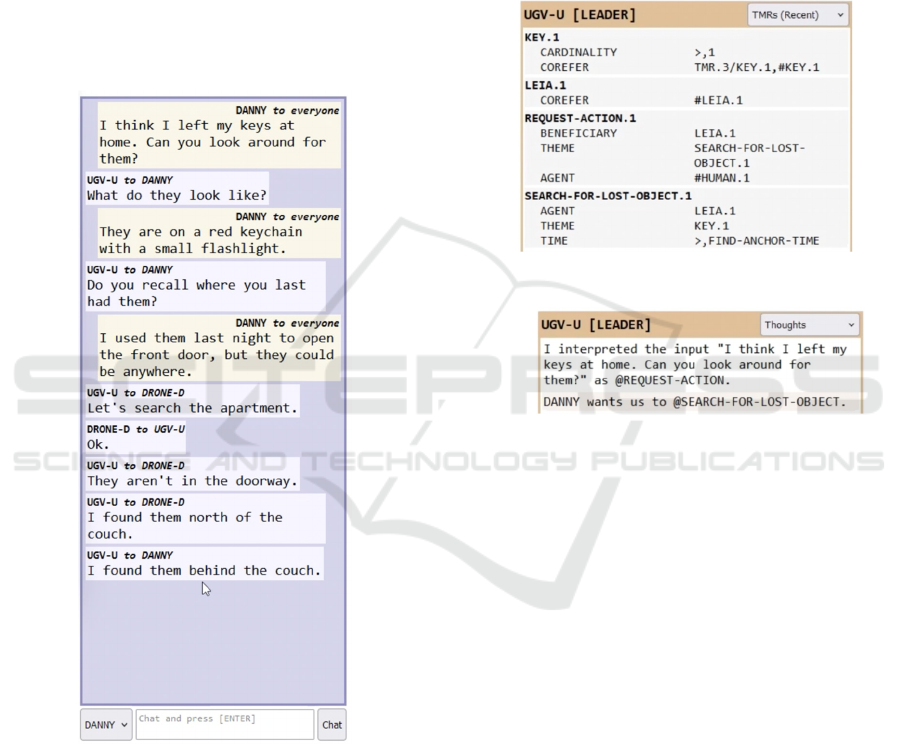
Figure 2: The full dialog in the demo. The prompt for typing
is at the bottom.
When Danny issues his request, both robots
semantically interpret the input, resulting in text-
meaning representations (TMRs) that are written in
the ontologically-grounded metalanguage used for all
agent knowledge, memory, and reasoning. This
metalanguage uses unambiguous ontological
concepts (not words of English) and their instances,
described by ontologically-grounded properties and
values. Ontological concepts are written in small caps
to distinguish them from words of English, and their
instances are indicated by numerical suffixes. The
process of language understanding is complicated, as
detailed in McShane and Nirenburg (2021).
Figure 3 shows the UGV’s TMR of Danny’s
request and Figure 4 shows its subsequent thoughts,
which are natural language traces of its reasoning for
the benefit of humans. (It reasons in the ontological
metalanguage.)
Figure 3: The UGV's interpretation of Danny's request.
Figure 4: The UGV's thoughts in response to Danny's
request.
Because the UGV has received a request for
action, and because it knows that has a helper (the
drone), it places a
COLLABORATIVE
-
ACTIVITY
on its
Agenda (Figure 5). Before it launches the plan for
SEARCH
-
FOR
-
LOST
-
OBJECT
,
it has to check if its
preconditions are met (Figure 5). The first
precondition, knowing the object type, is already met
(i.e., keys), but the second and third are not: knowing
the keys’ features and knowing where they were last
seen; so the UGV asks about these things in turn. The
reasoning associated with this sequence of actions is
shown in Figure 6.
Explaining Explaining
119
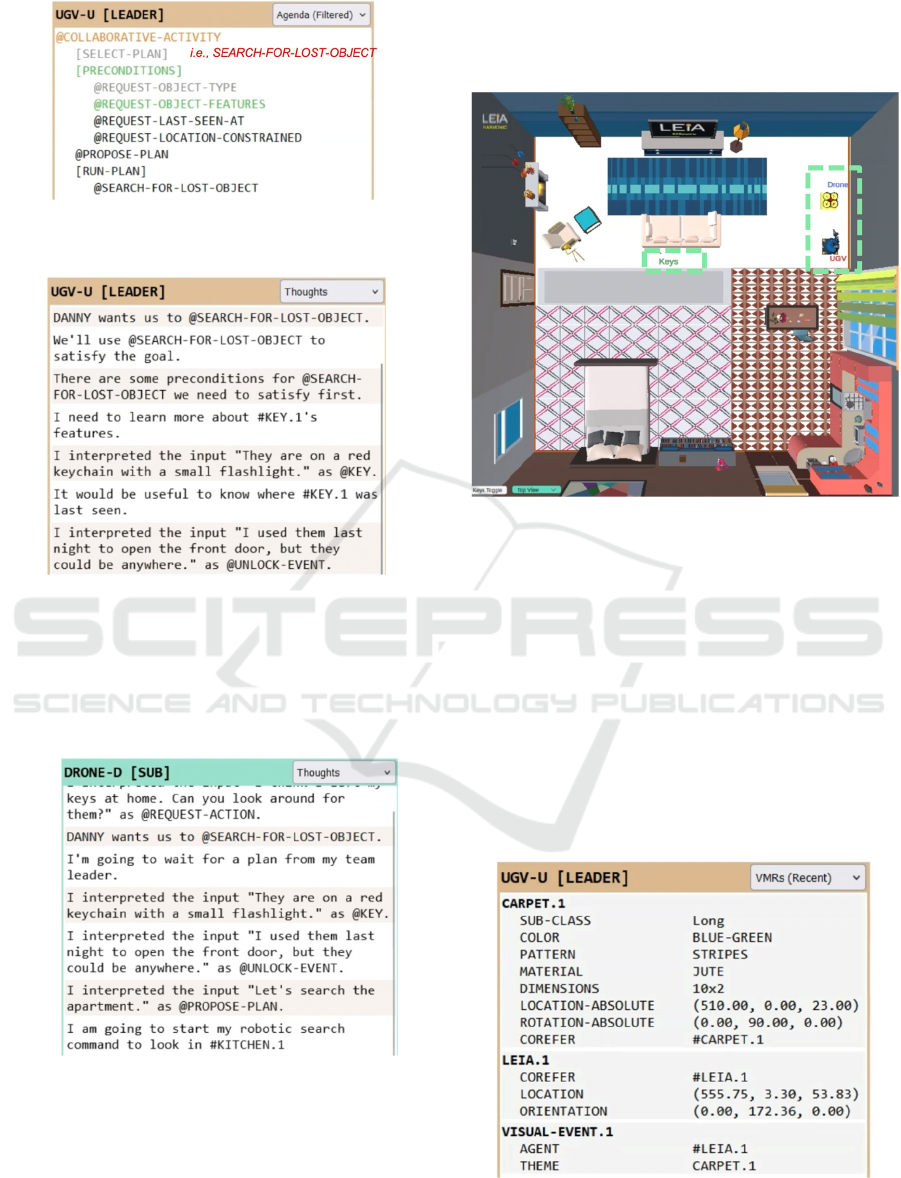
Figure 5: The UGV's agenda while it is fulfilling
preconditions for searching for the keys.
Figure 6: The UGV’s thoughts as it fulfilling preconditions
for searching for the keys.
The UGV then proposes the plan of searching the
apartment to the drone, the drone agrees, and it
launches a plan to do that. Its thoughts – including
those running up to this move – are shown in Figure 7.
Figure 7: The drone's thoughts leading up to and including
its starting to search the apartment.
Since the robots in this simulation are decentralized,
each having its own cognitive layer, the drone
independently carries out much of the same reasoning
as the UGV. (Note that our architecture also permits
centralized robots that share a cognitive layer.)
Having agreed upon a plan, the UGV and the
drone leave their charging stations, highlighted in
green in Figure 8, and begin searching the apartment.
Figure 8: The room layout just before the robots being
searching, with the robots and keys shown in green boxes.
The robots are equipped with sensors to detect,
identify, and tag objects, and to combine this data to
localize objects and themselves. Interpreted traces of
what they are seeing are shown in visual meaning
representations (VMRs) in the associated under-the-
hood panel. VMRs are similar in form and content to
TMRs since, no matter what an agent perceives or
which mode of perception it uses (hearing, vision,
etc.), it has to interpret the stimuli into ontologically-
grounded knowledge that feeds its reasoning. Figure
9 shows a moment when the UGV is looking at a
particular spot on the blue-green striped carpet.
Figure 9: A visual meaning representation (VMR).
EXPLAINS 2024 - 1st International Conference on Explainable AI for Neural and Symbolic Methods
120
The robots engage in a search strategy involving
waypoints, zones and sub-zones that are pre-
designated for the apartment environment (Oruganti
et al., 2024). The search action is triggered through
action commands from the strategic layer but the
search itself is controlled by the tactical (robotic)
layer. The cognitive (strategic) module knows which
zones exist but does not guide how the robots
maneuver through those zones. The simulation
system is equipped with timing strategies and
modules to ensure process and data synchronization
between the tactical and strategic layers.
Searching each zone is a subtask of the plan
FIND
-
LOST
-
OBJECT
. After completing each subtask – i.e.,
searching each zone – each robot reports to the other
one about whether it was successful, which is driven
by the
COLLABORATIVE
-
ACTIVITY
plan.
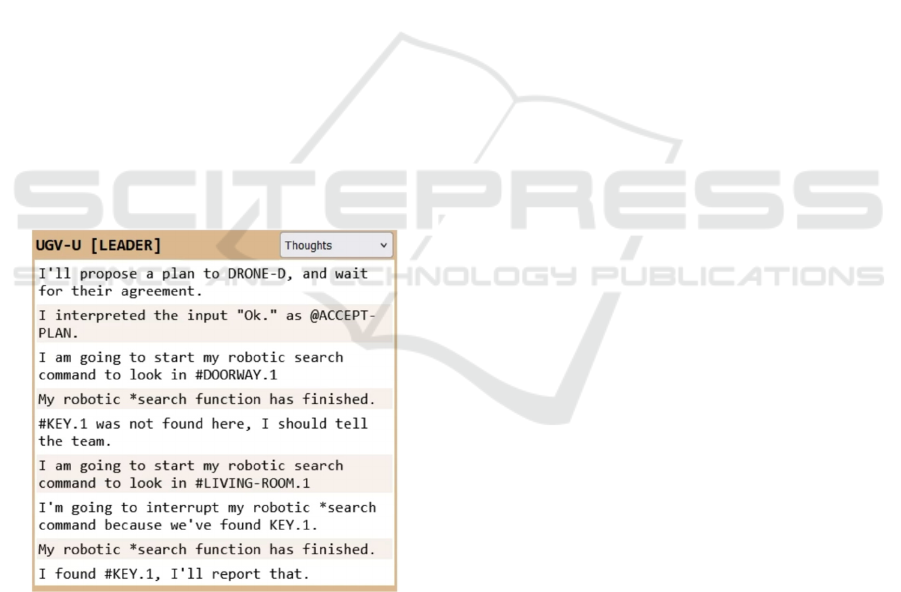
When the team leader finds the keys, it ceases
searching and first reports this to its subordinate and
then to Danny. The trace of this reasoning is shown in
Figure 9. It uses different formulations for each of
them because its language generation system (whose
traces are not shown in this demo system) is designed
to mindread its interlocutors and present information
in the most useful way for them. Whereas these robots
operate in terms of cardinal directions, making north
of the couch a good descriptor, most humans prefer
relative spatial terms like behind the couch.
Figure 10: The UGV's thoughts when it finds the keys and
decides to report that.
4 CONCLUSIONS
Explainability is essential to critical applications, and
in order for systems to be truly explanatory, they must
first of all understand what they are doing. This
requires that they be grounded in high-quality
knowledge bases that optimally integrate causal and
correlational reasoning.
This paper focused on explanation via traces of
system operation using under-the-hood panels. The
panels selected for this demo displayed the agents’
interpretation of language inputs and visual stimuli,
their reasoning, and their agenda. Much more could
be shown if target users would find that helpful: the
agents’ ontologies, episodic memories, lexicons,
decision-making about language generation, and so
on. The under-the-hood panels do not attempt to
capture unexplainables that are implemented using
machine learning, such as what drives robotic
movement or the robots’ approach to searching a
space.
In the current benchmark-driven climate, under-
the-hood panels offer an alternative standard of
system evaluation.
Under-the-hood panels are just one mode of
explanation for LEIAs. The other primary one is
language. The many things that a LEIA can explain
using language are detailed in Chapter 8 of McShane,
Nirenburg, and English (2024).
Although the theoretical, methodological, and
knowledge prerequisites for explanation by LEIAs
are quite mature, this doesn’t mean that all problems
associated with explanation are solved.
Consider the example of physicians explaining
relevant aspects of clinical medicine to patients, a
capability that was relevant for the MVP clinician-
training system mentioned above. The task has two
parts: deciding what to say and how to say it. Both of
these depend not only medical and clinical
knowledge, but also on the salient features of patients,
such as their health literacy (as hypothesized by the
physician), their interest in medical details, their
ability to process information based on their physical,
mental, and emotional states, and so on. Identifying
these salient features involves mindreading
(Spaulding, 2020) – also known as mental model
ascription. For example, an explanation may be
presented in many different ways:
• as a causal chain: “You feel tired because of an
iron deficiency.”
• as a counterfactual argument: “If you hadn’t
stopped taking your iron supplement you
wouldn’t be feeling so tired.”
• as an analogy: “Most people find it easier to
remember to take their medicine first thing in
the morning; you should try that.”
• using a future-oriented mode of explanation:
“If you take your iron supplement regularly,
you should feel much more energetic.”
Explaining Explaining
121

Moreover, explanations are not limited to speech
– they can include images, videos, body language,
live demonstration, and more. Overall, generating
explanations tailored to particular humans is a
difficult task. However, as with all other aspects of
cognitive modeling, simplified solutions hold
promise to be useful, particularly given the well-
established fact that adding more content to an
explanation does not necessarily make it better (cf.
the discussion of decision-making heuristics in
Kahneman, 2011).
ACKNOWLEDGEMENTS
This research was supported in part by Grant
#N00014-23-1-2060 from the U.S. Office of Naval
Research. Any opinions or findings expressed in this
material are those of the authors and do not
necessarily reflect the views of the Office of Naval
Research.
REFERENCES
Babic, B., Gerke, S., Evgeniou, T., Cohen, I. G. (2021).
Beware explanations from AI in health care. Science,
373(6552), 284–286.
Barredo Arrieta, A., Díaz-Rodríguez, N., Del Ser, J., et al.
(2020). Explainable artificial intelligence (XAI):
Concepts, taxonomies, opportunities and challenges
toward responsible AI. Information Fusion, 548: 82-
115.
Boden, M. (2006). Minds as Machines. Oxford University
Press.
Bodria, F., Giannotti, F., Guidotti, R., Naretto, F.,
Pedreschi, D., Rinzivillo, S. (2021). Benchmarking and
survey of explanation methods for black box models.
Arxiv:2102.13076v1.
Cambria, E., L. Malandri, F. Mercorio, M. Mezzanzanica,
and N. Npbani. 2023. A Survey on XAI and natural
language explanations. Information Processing and
Management, 60, 103-111.
Chan, S., Siegel, E. L. (2019). Will machine learning end
the viability of radiology as a thriving medical
specialty? British Journal of Radiology, 92(1094).
https://doi.org /10.1259/bjr.20180416
Craik, K. J. W. (1943), The Nature of Explanation.
Cambridge University Press.
De Graaf, M. M. A., A. Dragan, B. F. Malle, and T. Ziemke.
2021. Introduction to the Special Issue on Explainable
Robotic Systems. J. Hum.-Robot Interact. 10, 3, Article
22. https://doi.org/10.1145/3461597
Ehsan, U., Wintersberger, P., Liao, Q. V., Watkins, E. A.,
Manger, C., Daumé, Hal, III, Riener, A., Riedl, M. O.
(2022). Human-centered explainable AI (HCXAI):
Beyond opening the black-box of AI. CHI EA ’22:
Extended abstracts of the 2022 CHI Conference on
Human Factors in Computing Systems, pp. 1–7.
Association for Computing Machinery.
https://doi.org/10.1145/3491101.3503727
Finzel, B., Schwalbe, G. (2023). A comprehensive
taxonomy for explainable artificial intelligence: a
systematic survey of surveys on methods and concepts.
Data Mining and Knowledge Discovery.
https://doi.org/10.1007/s10618-022-00867-8
Gunning, D. (2017). Explainable artificial intelligence
(XAI). DARPA/I20. Program Update November 2017.
Hempel, C. G. (1965). Aspects of scientific explanation. In
Hempel, C. G. (1965), Aspects of Scientific Explanation
and Other Essays in the Philosophy of Science. Free
Press, pp. 331– 396.
Hitzler, P., M.K. Sarker and A. Eberhart (eds). 2023.
Compendium of Neurosymbolic Artificial Intelligence.
Frontiers in Artificial Intelligence and Applications,
vol. 369. IOS Press.
Kahneman, D. (2011). Thinking: Fast and slow. Farrar,
Strauss and Giroux.
Liao, V. Q., Varshney, K. R. (2022). Human-centered
explainable AI (XAI): From algorithms to user
experiences. arXiv:2110.10790.
Lombrozo, T. (2010). Causal–explanatory pluralism: How
intentions, functions, and mechanisms influence causal
ascriptions. Cognitive Psychology, 61(4): 303–332.
doi:10.1016/j.cogpsych.2010.05.002
Marcus, G. (2022, March 10). Deep learning is hitting a
wall. Nautilus. https://nautil .us/deep-learning-is-
hitting-a-wall-14467
Matzkin, A. (2021, September 29). AI in Healthcare:
Insights from two decades of FDA approvals. Health
Advances blog.
McShane, M., Jarrell, B., Fantry, G., Nirenburg, S., Beale,
S., Johnson, B. (2008). Revealing the conceptual
substrate of biomedical cognitive models to the wider
community. In J. D. Westwood, R. S. Haluck, H. M.
Hoffman, G. T. Mogel, R. Phillips, R. A. Robb, & K.
G. Vosburgh (Eds.), Medicine meets virtual reality 16:
Parallel, combinatorial, convergent: NextMed by
design (pp. 281–286). IOS Press.
McShane, M., Nirenburg. S. (2021). Linguistics for the age
of AI. MIT Press. Available, open access, at
https://direct.mit.edu/books/book/5042/Linguistics-
for-the-Age-of-AI.
McShane, M., Nirenburg, S., English, J. (2024). Agents in
the Long Game of AI: Computational cognitive
modeling for trustworthy, hybrid AI. MIT Press.
Minsky, M. 1961. Steps Toward Artificial Intelligence.
Proceedings of the Institute of Radio Engineers, 49: 8–
30; reprinted in Feigenbaum and Feldman, (eds.)
Computers and Thought. McGraw-Hill. 1963.
Minsky. M. (2006). The Emotion Machine. Simon and
Schuster.
Mueller, S. T., Hoffman, R. R., Clancey, W., Emrey, A., &
Klein, G. (2019). Explanation in human-AI systems: A
literature meta-review. Synopsis of key ideas and pub-
lications, and bibliography for explainable AI.
EXPLAINS 2024 - 1st International Conference on Explainable AI for Neural and Symbolic Methods
122

Technical Report, DARPA Explainable AI Program.
arXiv:1902.01876.
Nagahisarchoghaei, M., Nur, N., Cummins,, L., Karimi, M.
M., Nandanwar, S., Bhattacharyya, S., Rahimi, S.
(2023). An empirical survey on explainable AI
technologies: Recent trends, use-cases, and categories
from technical and application perspectives.
Electronics, 12, 1092. https://doi.org/10.3390/
electronics12051092
Nirenburg, S. (2017). Cognitive systems: Toward human-
level functionality. Special Issue on Cognitive Systems.
Artificial Intelligence Magazine, 38(4), 5–12.
https://doi .org/10.1609/aimag.v38i4.2760
Sanjay Oruganti, Sergei Nirenburg, Marjorie McShane,
Jesse English, Michael Roberts, and Christian Arndt.
“HARMONIC: A Framework for Explanatory
Cognitive Robots”. In: Proceedings of the IEEE
Conference on Robotics and Automation (ICRA@40),
Rotterdam, Netherlands. 2024
Oruganti, S.S.V., S. Nirenburg, M. McShane, J. English, M.
Roberts & C. Arndt. (Submitted). HARMONIC:
Cognitive and Control Collaboration in Human-
Robotic Teams. Submitted to ICRA-2025.
Rizzo, M, Albarelli, A., Lucchese, C., Conati, C. (2023). A
theoretical framework for AI models explainability.
Proceedings of IJCAI-23.
Rosenfeld, A., Richardson, A. (2019). Explainability in
human–agent systems. Autonomous Agents and Multi-
Agent Systems, 33: 673–705.
Schwalbe, G., Finzel, B. (2024). A comprehensive
taxonomy for explainable artificial intelligence: a
systematic survey of surveys on methods and concepts.
Data Mining and Knowledge Discovery, 38: 3043–
3101. https://doi.org/10.1007/s10618-022-00867-8
Spaulding, S. (2020). What is mindreading?
Interdisciplinary Review of Cognitive Science.
https://wires.onlinelibrary.wiley.com/doi/10.1002/wcs.
1523
Yang, S. C-H., Folke, T., & Shafto, P. (2022). A
psychological theory of explainability.
arXiv:2205.08452.
Explaining Explaining
123
