
Local Motion Planning for Overtaking Maneuvers in a Rural Road
Environment
D
´
aniel Losonczi
1 a
,
´
Arp
´
ad Feh
´
er
2 b
, Szil
´
ard Aradi
2 c
and L
´
aszl
´
o Palkovics
3 d
1
Systems and Control Laboratory, HUN-REN Institute for Computer Science and Control (SZTAKI),
Kende utca 13-17., H-1111 Budapest, Hungary
2
Department of Control for Transportation and Vehicle Systems, Faculty of Transportation Engineering and Vehicle
Engineering, Budapest University of Technology and Economics, M
˝
uegyetem rkp. 3., H-1111 Budapest, Hungary
3
Sz
´
echenyi Istv
´
an University, Egyetem t
´
er 1., H-9026 Gy
˝
or, Hungary
Keywords:
Local Motion Planning, Overtaking Maneuvers, Rural Road Environment, Autonomous Vehicles, Frenet
Frame.
Abstract:
This paper introduces an application of local motion planning designed explicitly for overtaking maneuvers in
a rural road environment. The approach integrates multiple driving strategies for enhanced passenger comfort,
including the fastest path and minimum jerk trajectory. A robust trajectory planner technique is developed
using the Frenet frame, effectively considering real traffic situations, curves, and moving obstacles. Compre-
hensive analyses are performed on vehicle dynamics, individual cost function components, and planning and
tracing times to assess the performance and computational efficiency of the proposed methods. The simulation
results highlight the approach’s strengths in maintaining dynamic feasibility, ensuring safety, and enhancing
passenger comfort while identifying areas for potential improvements, such as computational overhead in
complex scenarios.
1 INTRODUCTION
Autonomous vehicle systems must reliably and accu-
rately plan trajectories in real-time within dynamic
and changing environments, considering obstacles
and moving goals. Achieving this requires a compre-
hensive, hierarchical software system that integrates
multiple layers (Paden et al., 2016), each essential for
ensuring the vehicle’s safe and efficient navigation.
As the first step in the motion planning process,
observing the vehicle’s environment and representing
it as a map is necessary (Bresson et al., 2017). Subse-
quently, the vehicle must determine a global route that
avoids static obstacles while considering various con-
straints, such as the vehicle’s kinematic limitations
and the road’s geometry. While traversing the global
path, the vehicle has to make decisions at specific
points and then plan its local trajectories (Schwart-
ing et al., 2018). In the process of doing so, the ve-
hicle must generate and periodically update a local
a
https://orcid.org/0009-0007-5053-1714
b
https://orcid.org/0000-0002-9491-4211
c
https://orcid.org/0000-0001-6811-2584
d
https://orcid.org/0000-0001-5872-7008
path that follows the global route as a reference, con-
sidering real-time constraints, the vehicle’s dynamics,
and dynamically moving objects. The term ”local”
indicates that this path is short-term, and the planning
occurs in the vehicle’s local coordinate system. The
vehicle must follow the planned local path using con-
trol algorithms that determine longitudinal and lateral
control inputs. All of this must be performed in real-
time, accounting for uncertainties and the vehicle’s
continuously changing environment.
This paper presents a method for local trajec-
tory planning in a Frenet frame to implement a lane-
keeping and overtaking maneuver.
1.1 Related Work
The problem of trajectory planning and control for
autonomous vehicles, particularly in overtaking sce-
narios, has been addressed through various innova-
tive approaches. These efforts balance multiple ob-
jectives, such as safety, smoothness, and efficiency,
while considering practical constraints and dynamic
environments.
Several methodologies illustrate these concepts.
220
Losonczi, D., Fehér, Á., Aradi, S. and Palkovics, L.
Local Motion Planning for Overtaking Maneuvers in a Rural Road Environment.
DOI: 10.5220/0013001600003822
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 220-227
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

For instance, (You et al., 2015) proposed a coop-
erative vehicle infrastructure system for improving
lane change maneuvers through real-time adjustments
based on vehicle dynamics. Similarly, (Palatti et al.,
2021) developed a risk assessment and decision-
making framework using a finite state machine to en-
hance overtaking safety. During motion planning for
overtaking situations, the authors used a graph-based
method in (Heged
˝
us et al., 2020) that reduces com-
plexity by clustering and predicts the movement of
surrounding vehicles with density functions, ensuring
a safe and comfortable trajectory.
Model Predictive Control (MPC) has been ex-
tensively applied to autonomous vehicle overtaking.
Studies by (Li et al., 2023) and (Batkovic et al., 2022)
demonstrate MPC’s real-time optimization of trajec-
tories, accounting for dynamic road conditions. Addi-
tionally, (Dixit et al., 2020) integrated potential fields
and reachability sets with MPC for high-speed over-
taking on highways.
Distributed motion planning techniques also show
promise. (Wu et al., 2021) and (Kala and Warwick,
2014) emphasize decentralizing decision-making to
improve traffic safety and system responsiveness.
(Xie et al., 2022) extended this approach with the Ar-
tificial Potential Field method for multi-vehicle envi-
ronments.
Reinforcement learning (RL) is another advanced
methodology. A continuous reinforcement learning
method was developed to determine the trajectory of
the double lane change maneuver (Feh
´
er et al., 2020).
The real-time solution was compared with the per-
formance of human drivers. In (Lelk
´
o and N
´
emeth,
2024), the authors present a control framework that
combines a robust H
∞
controller and an RL agent
to ensure the safe movement of autonomous vehi-
cles. (Kulathunga, 2022) and (Wang et al., 2023)
highlighted RL’s effectiveness in improving decision-
making and trajectory planning, with significant suc-
cess in the Frenet coordinate system. Similarly,
(Huang et al., 2023) proposed a multiobjective op-
timization algorithm within the Frenet frame to en-
hance driving comfort and safety.
Virtual target-based algorithms are also notable.
(Chae and Yi, 2020) developed a method incorporat-
ing human driving behavior for improved driver ac-
ceptance and safety. (Ghumman et al., 2008) pro-
posed a rendezvous guidance-based trajectory gener-
ation approach for real-time safety and comfort.
Dynamic trajectory planning within the Frenet
coordinate system remains crucial. (Wang et al.,
2019) and (Paden et al., 2016) explored compre-
hensive surveys and hierarchical urban and highway
driving frameworks, focusing on safety and consis-
tency. (Moghadam and Elkaim, 2021) further devel-
oped a hierarchical framework combining long-term
and short-term trajectory optimization.
For specific scenarios involving frequent accel-
eration and deceleration, (Zhang et al., 2019) pre-
sented an optimal trajectory generation method con-
sidering centripetal acceleration constraints, benefi-
cial for curvy roads.
1.2 Contributions of the Paper
As a contribution, we propose a method to plan an
optimal local trajectory for lane-keeping and overtak-
ing maneuvers in a rural road environment. In each
planning step, the planner generates several alterna-
tive trajectories in the feasible range and assigns a cost
to each of them. The optimization objective can be
multiple and is achieved by weighting the cost func-
tion. The method is designed to be easily integrated
into a hierarchical approach to vehicle decision con-
trol structure. In order to demonstrate and test the
method, a local planning solution was integrated into
a self-developed simulation environment.
Section 2 offers a detailed formulation of the prob-
lem and essential topological information pertinent to
the task. In Section 3, we introduce the Hierarchi-
cal Control Structure utilized in the construction of
our system. Following this, Section 4 outlines the
local trajectory generation process within the Frenet
Frame, conducted in the Simulation Environment de-
scribed in Section 5. Finally, Section 6 discusses the
results of the successful maneuver, highlighting the
cost function-based driving style management and the
decision-making and control strategies employed for
maneuver handling.
2 LOCAL MOTION PLANNING
AND FRENET FRAME
Local trajectory planning focuses on generating a fea-
sible and safe trajectory for a vehicle over a short time
horizon, typically in response to dynamic changes in
the environment. This includes continuously updat-
ing the planned trajectory based on new sensor data
and the vehicle’s current state. Unlike route planning,
which provides a static sequence of points describing
a plan, trajectory planning also includes additional ve-
locity profiles.
Trajectory planning in dynamic environments is
inherently complex and is considered PSPACE-hard
(Paden et al., 2016). This complexity increases in dy-
namic settings, where previously manageable prob-
lems become intractable. As exact algorithms for
Local Motion Planning for Overtaking Maneuvers in a Rural Road Environment
221
non-trivial trajectory planning in autonomous driv-
ing are unavailable, numerical methods are often em-
ployed. These methods address trajectory planning
by utilizing variational methods within the time do-
main or by transforming the problem into a path plan-
ning challenge within a configuration space that in-
corporates a time dimension. The path planning solu-
tion accommodates differential constraints and is then
transformed back into a trajectory.
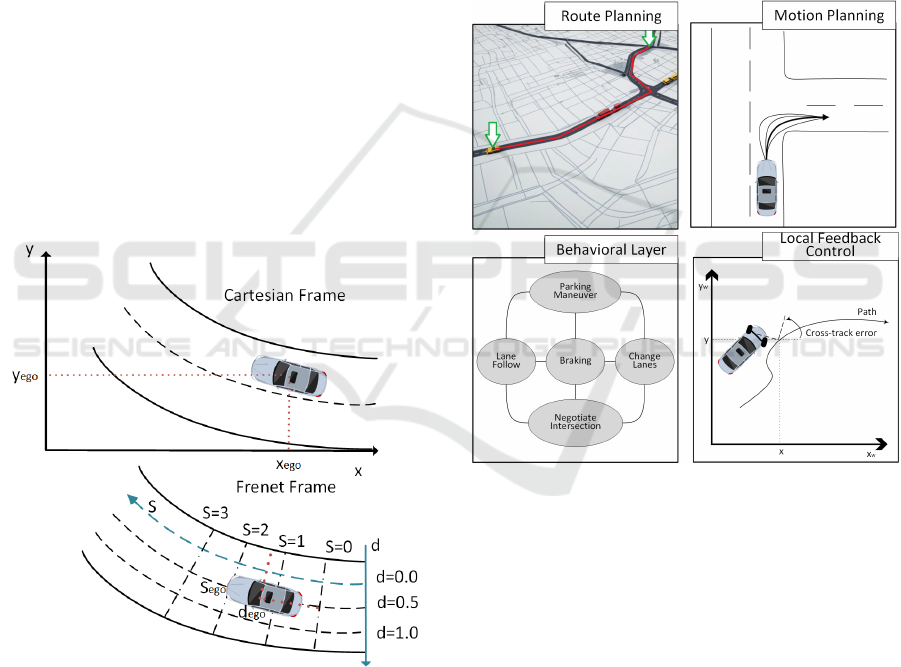
The Frenet-Serret (FS) frame (Werling et al.,
2010) is a powerful mathematical tool also used in ve-
hicle dynamics and path planning to describe vehicle
motion along a planned trajectory. This frame defines
a moving reference frame with tangential and normal
vectors at a certain point on a curve, called the center
line. This center line can be an ideal path on a free
road, the center of the road, or a path planned by an
algorithm. In this paper, the reference line will be the
center of the right-hand lane. As shown in Figure 1,
the s-axis runs parallel to the lane line, and the d-axis
is perpendicular to the reference line. This simplifica-
tion makes it easier to plan within the proposed frame
as the local coordinate system moves with the vehicle,
and constraints such as lane boundaries and obstacles
are easier to handle.
Figure 1: Frenet Frame Coordinate System.
Given the initial and final states of the vehicle
along the d-axis (d
s
,
˙
d
s
,
¨
d
s
, d
i
,
˙
d
i
,
¨
d
i
), six equations can
be formed to determine the polynomial coefficients,
representing the d-axis trajectory with a quintic poly-
nomial. For the s-axis, using its start and end states
(s
s
, ˙s
s
, ¨s
s
, ˙s
i
, ¨s
i
), a quartic polynomial represents the
trajectory. The planning period t ranges from 0 to
T , creating a time series [0, ∆t, . . . , T ], which is ap-
plied to both axes’ trajectory equations to calculate
each trajectory point’s coordinates. This will be fur-
ther discussed in Section 4.
3 HIERARCHICAL CONTROL
APPROACH
Several advanced methodologies for controlling
highly automated vehicles have been developed re-
cently. One prevalent approach is the hierarchical
structure (Paden et al., 2016), which consists of four
levels, each with a specific role in the vehicle’s oper-
ation, as illustrated in Fig. 2
Figure 2: Hierarchical Control Structure.
At the first level, autonomous vehicles plan a
global route within a given road network to reach
their destination from the current position. The road
network is represented as a directed graph, where
weighted edges determine the cost of traversing the
network. These weights can represent various fac-
tors such as distance, travel time, traffic density, and
road conditions. Standard algorithms used for global
route planning include Dijkstra’s algorithm and the
A* search algorithm.
Once a global route plan is selected, the vehicle
must navigate the route and interact with other road
users according to traffic conditions and rules. The
behavioral layer is responsible for selecting the ap-
propriate driving behavior at any given time, consid-
ering the actions of other road users, road conditions,
and infrastructure signals. This decision-making pro-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
222

cess can be automated using finite state machines and
probabilistic planning formalisms, such as Markov
Decision Processes (MDPs) and their generalizations.
After the behavioral layer decides on the driving
behavior, the local motion planning layer defines the
vehicle’s trajectory. This trajectory must be dynami-
cally feasible, ensuring passenger comfort and avoid-
ing obstacles detected by onboard sensors. Numerical
approximation methods are commonly used to solve
the motion planning problem. The solution discussed
in this article focuses on this layer.
At the fourth level, the planned path and trajec-
tory are executed. The feedback controller calculates
the corresponding actuator inputs for driving, steer-
ing, and braking to execute the planned movement
and reduce tracking errors. This layer relies on well-
established algorithms that emphasize robustness and
stability.
4 LOCAL TRAJECTORY
PLANNING IN FRENET FRAME
Local trajectory planning and tracking are conducted
within a simulation environment that adheres to real-
world traffic restrictions. The global path is defined
as the centerline of the right lane of the road, serv-
ing as our reference route within the Frenet frame, as
previously discussed.
In the Frenet frame coordinate system, the lateral
displacement d is zero when the vehicle is on the ref-
erence path. The value of d increases as the vehi-
cle moves towards the left edge of the road and de-
creases (becoming negative) as it approaches the right
edge. The longitudinal position s represents the vehi-
cle’s position along the local trajectory, reset to zero
at each planning interval.
The vehicle is initialized on this global trajectory
at the start, with a planning interval of T = 3 sec-
onds. This planning interval allows the vehicle to
plan ahead for 41.6 meters at a target speed of
50
3.6
m/s,
which is deemed safe for dynamic obstacle detection
and avoidance.
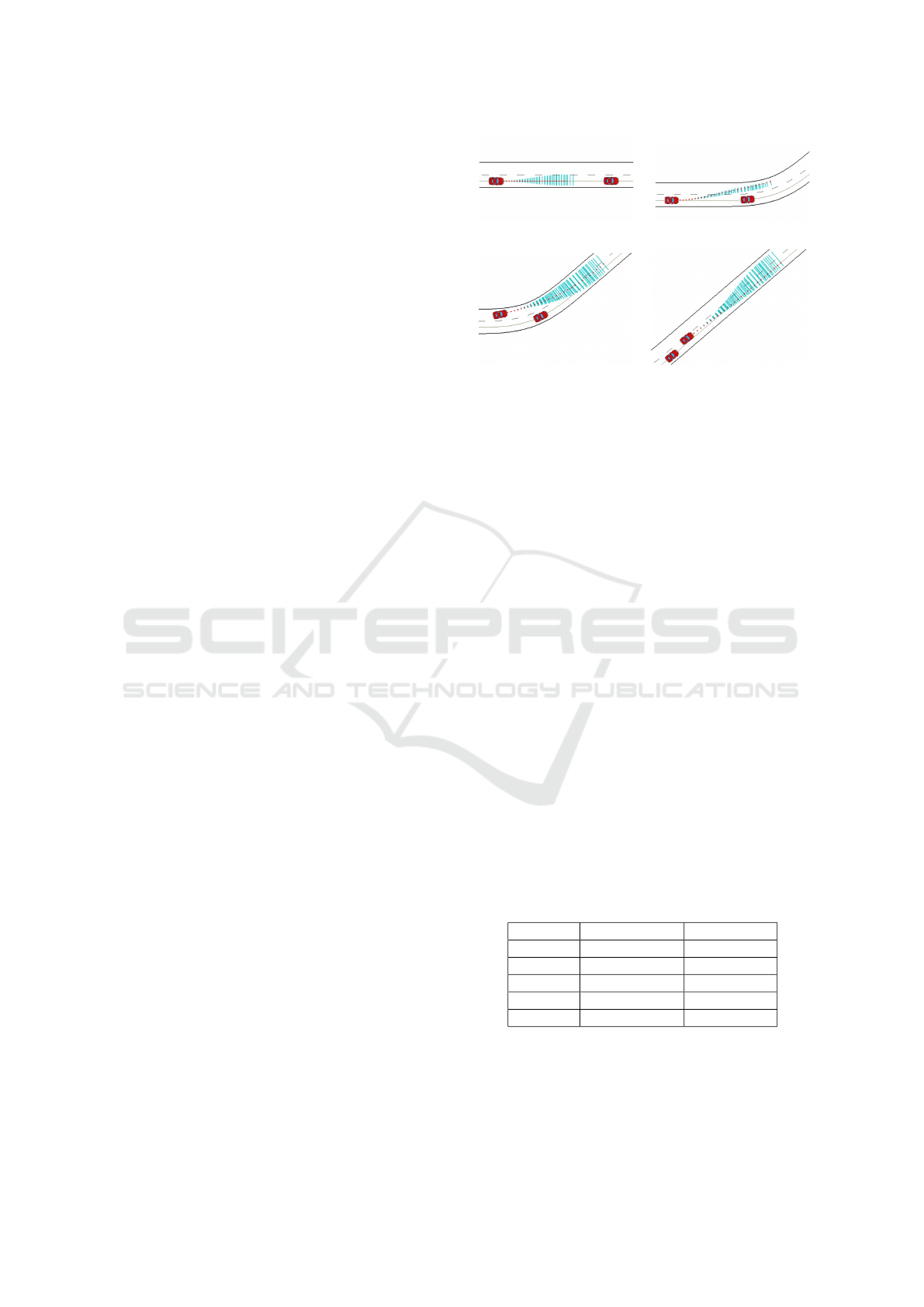
4.1 Planning Process
During the planning process of the local trajectory (as
shown in Fig. 4a), several possible route alternatives
are planned. To ensure thorough exploration of the
available space, the alternatives are generated at ev-
ery 0.1-meter point along the full width of the road.
These trajectories are described with different poly-
nomials in the lateral and longitudinal directions. The
polynomials give the deviation from the global path.
Firstly, the lateral characteristics are determined by
quintic polynomial fitting, where the 1st, 2nd, 3rd,
and 4th derivatives describe the lateral characteristics
of the trajectory at each time step. The quintic poly-
nomial is expressed as:
d(t) = a
0
+ a
1
t + a
2
t
2
+ a
3
t
3
+ a
4
t
4
+ a
5
t
5
(1)
where d(t) represents the lateral position at time
t. The coefficients a
0
, a
1
, a
2
, a
3
, a
4
, and a
5
are deter-
mined based on boundary conditions such as initial
and final positions, velocities, and accelerations.
The first derivative represents the rate of change
of the lateral position with respect to time, indicating
how fast the vehicle is moving laterally at any given
moment. The second calculates the rate of change of
lateral velocity, providing information about the lat-
eral forces acting on the vehicle. The third derivative
represents the rate of change of lateral acceleration,
which is important for determining ride comfort.
The longitudinal characteristics are defined at
each time step using a quartic polynomial given by:
s(t) = b
0
+ b
1
t + b
2
t
2
+ b
3
t
3
+ b
4
t
4
(2)
where s(t) represents the longitudinal position at time
t.
The first derivative represents the rate of change
of the longitudinal position with respect to time. The
second measures the rate of change of longitudinal
velocity. The third represents the rate of change of
longitudinal acceleration.
4.2 Combining Profiles and Cost
Function
Once the longitudinal and lateral profiles are gener-
ated, they are combined. A cost function is used to
select the appropriate trajectory for the given objec-
tive. The function includes jerk, deviation from the
reference path, lane change, and costs for weight-
ing the fastest trajectory and shortest trajectory. By
weighting these factors differently, trajectory designs
for various purposes can be implemented. The results
of these designs are presented in the following sec-
tions. Each trajectory’s costs are combined and nor-
malized, and the trajectory with the lowest total cost
is selected. In the case of obstacle detection, the ac-
tual trajectory encountering an obstacle is prohibited
rather than penalized by cost.
The elements of the cost function can be calcu-
lated as follows:
J(t) =
T
∑
t=0
d
′′′
(t)
2
(3)
Local Motion Planning for Overtaking Maneuvers in a Rural Road Environment
223

The jerk cost J(t) is calculated by summing the
squares of the third derivatives of the lateral position
with respect to time. This represents the cumulative
lateral acceleration change over the planning horizon.
D
ref
=
T
∑
t=0
d(t) − x
target
2
(4)
The deviation from the reference route D
ref
is calcu-
lated by summing the squared differences between the
actual lateral position d(t) and the target lane center
x
target
over the planning horizon.
Dist =
q
(GlobalRouteEnd
xy
− TrajectoryEnd
xy
)
2
(5)
The distance cost Dist is calculated as the Euclidean
distance between the planned trajectory endpoint and
the global route endpoint.
L
change
=
d
i
− x
target
(6)
The lane change cost L
change
is calculated as the abso-
lute difference between the lateral displacement d
i
of
the trajectory and the target lane center x
target
.
Table 1: Cost Function Parameters.
Cost Function Parameters
Penalized
Weights
Comfort
stlye
Sporty
stlye
Jerk 10.0 1.3
Speed 1.3 10.0
Deviation 3.0 3.0
Distance 0.01 0.01
Lane
Change
3.0 3.0
Finally, the resulting trajectories are transformed
from the Frenet frame to the global Cartesian coordi-
nate system for visualization and tracking. The trans-
formation from Frenet to global coordinates involves
mapping a local position (given by s and d) on a ref-
erence path to its corresponding global position by
calculating the global coordinates for the given arc
length, applying the lateral offset to these coordinates,
determining the orientation and segment lengths, and
deriving the curvature from changes in orientation.
5 SIMULATION ENVIRONMENT
For the development and testing of the local trajec-
tory planning method, a unique simulation environ-
ment was developed, which consists of the following
components:
• A road generator that meets standard road design
guidelines. It builds up the track from straight,
curved, and clothoid transitional curves. The ru-
ral road environment was created by defining two
lanes. The global path is the center line of the
right lane in the direction of travel.
• A nonlinear planar single-track vehicle model
containing a dynamic wheel model (Heged
˝
us
et al., 2020) is also applied as an EGO vehicle to
provide accurate behavior prediction.
• Lateral MPC controller running a linear dynamic
model. The model states that there are tracking
errors, which the controller aims to minimize. The
yaw-rate profile is defined as a constraint.
• Longitudinal PID controller. The speed reference
is determined by the speed profile.
• Transformation solutions that facilitate planning
in the Frenet frame. Simplified traffic simulation.
• 2D graphical interface see in Fig. 3
Figure 3: Simulation Environment.
6 RESULTS
As a result of this study, we present a local trajec-
tory planning method specifically designed for over-
taking maneuvers in rural environments. A compre-
hensive software architecture was used for validation,
including global route planning, a decision-making
layer, local motion planning, and local feedback con-
trol. As mentioned in Section 4, the global route has
been aligned and fitted to the reference path.
The maneuvering scenarios were tested in the
presented simulation environment. Personalized
decision-making was implemented using a finite-state
machine based on a simplified version of the MO-
BIL (Minimizing Overall Braking Induced by Lane
changes) model (Kesting et al., 2007), which is a lane-
changing algorithm that assesses the advantages and
consequences of a lane change for the ego vehicle
and the vehicles around it. The model consists of an
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
224
incentive criterion that promotes lane changes bene-
fiting traffic flow and a safety criterion that prevents
lane changes from posing a risk to other vehicles. Our
simplified MOBIL model defines three states, which
maneuvers are shown in Figure 4:
• Free-Driving State: The ego vehicle remains in or
returns to this state if there is no preceding vehi-
cle. The primary operations involve controlling
speed and following the reference route with the
specified driving style. In this state, trajectories
crossing into the opposite lane are strictly prohib-
ited to ensure safety and compliance with traffic
rules.
• Tracking State: This state occurs when another
vehicle is in front of the ego vehicle, prevent-
ing a safe overtake. Here, Adaptive Cruise Con-
trol (ACC) is realized, allowing the ego vehicle
to adapt to the speed of the preceding vehicle and
maintain a safe distance. The Intelligent Driver
Model (IDM) (Kesting et al., 2010) is utilized
to calculate the desired acceleration based on the
current speed, the distance and relative speed be-
tween the two vehicles.
• Overtaking State: This state is triggered when the
decision-making process deems overtaking feasi-
ble, and the driver approves it. The steps involved
in this maneuver are swerving, overtaking, and re-
turning to the original lane.
6.1 Cost Function Based State
Management
During the planning process, two distinct settings
were identified beside the decision-based states: jerk
minimization (comfort setting) and fastest trajectory
execution (sporty setting). In the comfort setting, the
cost function heavily weights the variation in lateral
acceleration, whereas, in the sporty setting, the ex-
ecution time is prioritized, as shown in Table 1. A
comparative cost function diagram pair can be found
in Figure 5.
The driving style can be customized using the cost
parameters outlined above. For example, trajectories
with lower lateral acceleration can be selected for a
smoother ride, while a faster method yields sportier
trajectories with higher jerks. This customization
is reflected in the decision-making layer, where a
sportier setting may lead to riskier decisions due to
shorter trajectory execution times. For this, detailed
maximum lateral slip values corresponding to differ-
ent road IDs, which denote varying levels of curve
difficulties in both comfort and sporty styles, are pro-
vided in Table 2.
(a) Free-Driving / Tracking. (b) Swerving.
(c) Overtaking (d) Returning
Figure 4: Local Trajectories during maneuvers.
6.2 Control Strategies
The accurate and safe lateral tracking of planned tra-
jectories is managed by an MPC (Model Predictive
Controller) that handles the lateral and angular er-
ror. Meanwhile, the speed is maintained by a PID
(Proportional-Integral-Derivative) controller. The tar-
get speed for the PID controller is determined by
the motion planner and is maximized by the decision
layer. These velocity profiles of the optimal trajectory
are assigned to the control at each time step, tracing
75% of the trajectory before the next planning. By
default, the vehicle plans and proceeds free-driving
along the trajectory in one of the operationally switch-
able driving styles (comfort or sporty). If a vehicle is
detected ahead within a safe braking distance, the be-
havioral layer switches to the tracking state, and the
vehicle adaptively matches its speed to the preceding
vehicle and maintains a safe distance until the over-
taking maneuver is triggered. Upon activation, the
vehicle switches to the overtaking state, increases its
speed, and selects trajectories that allow for a quick
and safe overtaking. Once the maneuver is complete,
the vehicle returns to the previous state and continues
free-driving on its path.
Table 2: Maximum lateral slip values for comfort and sporty
styles across different difficulty of road sections.
Road ID Comfort stlye Sporty style
1 0.00772 0.01056
2 0.00171 0.01195
3 0.00746 0.01466
4 0.00838 0.01706
5 0.00996 0.01192
The driving style influences the lateral and longi-
tudinal characteristics of the maneuvers. These trajec-
tories are selected by the designer using the associated
cost functions, ensuring the vehicle’s behavior aligns
with the desired performance and safety criteria.
Local Motion Planning for Overtaking Maneuvers in a Rural Road Environment
225
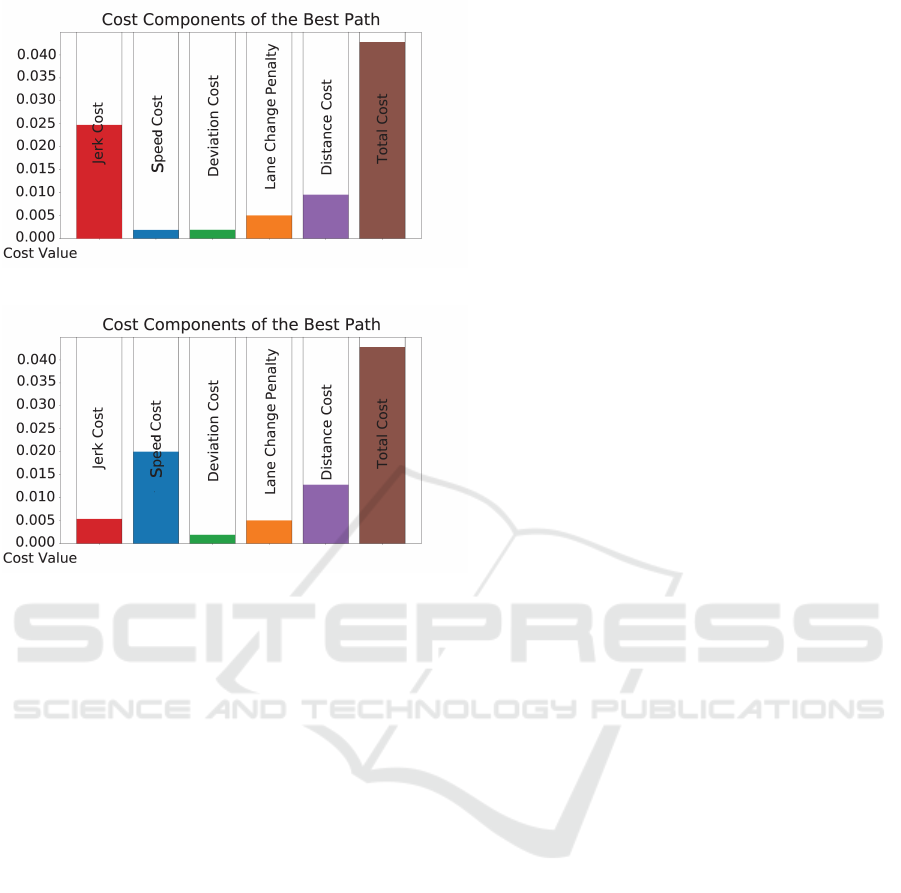
(a) Cost Function Diagram of Comfort setting
(b) Cost Function Diagram of Sporty setting
Figure 5: Different Driving Styles given the same planning
conditions.
7 CONCLUSIONS
In this paper, we presented a comprehensive approach
to local motion planning for autonomous vehicles,
with a particular focus on overtaking maneuvers in
rural road environments. Our method demonstrated
effectiveness, safety, and reliability, proving easy to
tune for various driving styles. Currently, our sim-
ulation includes two vehicles, and we aim to expand
this to incorporate traffic scenarios, allowing for over-
taking in more complex environments. Our immedi-
ate goal is to implement real vehicle tests in a known
environment to validate our approach further. Ad-
ditionally, we aim to replace the polynomial fit de-
sign with a classical trajectory design method. This
transition will allow us to determine curvature points
and trajectory orientation more precisely, enabling
the creation of unique, parameterizable trajectories.
Such advancements will facilitate the design of opti-
mized paths, including specific apex points of curves,
thereby enhancing the versatility and performance of
autonomous vehicle motion planning.
ACKNOWLEDGEMENTS
The research was supported by the European Union
within the framework of the National Laboratory for
Autonomous Systems. (RRF-2.3.1-21-2022-00002)
REFERENCES
Batkovic, I., Zanon, M., and Falcone, P. (2022). Model
predictive control for safe autonomous driving appli-
cations. In AI-enabled Technologies for Autonomous
and Connected Vehicles, pages 255–282. Springer.
Bresson, G., Alsayed, Z., Yu, L., and Glaser, S. (2017).
Simultaneous localization and mapping: A survey of
current trends in autonomous driving. IEEE Transac-
tions on Intelligent Vehicles, 2(3):194–220.
Chae, H. and Yi, K. (2020). Virtual target-based overtaking
decision, motion planning, and control of autonomous
vehicles. IEEE Access, 8.
Dixit, S., Montanaro, U., Dianati, M., Oxtoby, D., Mizu-
tani, T., Mouzakitis, A., and Fallah, S. (2020). Trajec-
tory planning for autonomous high-speed overtaking
in structured environments using robust mpc. IEEE
Transactions on Intelligent Transportation Systems,
21.
Feh
´
er,
´
A., Aradi, S., and B
´
ecsi, T. (2020). Hierarchical eva-
sive path planning using reinforcement learning and
model predictive control. IEEE Access, 8:187470–
187482.
Ghumman, U., Kunwar, F., and Benhabib, B. (2008).
Guidance-based on-line motion planning for au-
tonomous highway overtaking. International Journal
on Smart Sensing and Intelligent Systems, 1.
Heged
˝
us, T., N
´
emeth, B., and G
´
asp
´
ar, P. (2020). Design
of a low-complexity graph-based motion-planning al-
gorithm for autonomous vehicles. Applied Sciences,
10(21):7716.
Huang, J., He, Z., Arakawa, Y., and Dawton, B. (2023). Tra-
jectory planning in frenet frame via multi-objective
optimization. IEEE Access, 11:70764–70777.
Kala, R. and Warwick, K. (2014). Dynamic distributed
lanes: motion planning for multiple autonomous ve-
hicles. Applied intelligence, 41:260–281.
Kesting, A., Treiber, M., and Helbing, D. (2007). General
lane-changing model mobil for car-following models.
Transportation Research Record, 1999:86–94.
Kesting, A., Treiber, M., and Helbing, D. (2010). Enhanced
intelligent driver model to access the impact of driv-
ing strategies on traffic capacity. Philosophical trans-
actions. Series A, Mathematical, physical, and engi-
neering sciences, 368:4585–4605.
Kulathunga, G. (2022). A reinforcement learning based
path planning approach in 3d environment. In Pro-
cedia Computer Science, volume 212.
Lelk
´
o, A. and N
´
emeth, B. (2024). Optimal motion design
for autonomous vehicles with learning aided robust
control. IEEE Transactions on Vehicular Technology.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
226

Li, G., Zhang, X., Guo, H., Lenzo, B., and Guo, N. (2023).
Real-time optimal trajectory planning for autonomous
driving with collision avoidance using convex opti-
mization. Automotive Innovation, 6(3):481–491.
Moghadam, M. and Elkaim, G. H. (2021). An autonomous
driving framework for long-term decision-making and
short-term trajectory planning on frenet space. In
IEEE International Conference on Automation Sci-
ence and Engineering, volume 2021-August, pages
1745–1750. IEEE Computer Society.
Paden, B.,
ˇ
C
´
ap, M., Yong, S. Z., Yershov, D., and Fraz-
zoli, E. (2016). A survey of motion planning and con-
trol techniques for self-driving urban vehicles. IEEE
Transactions on intelligent vehicles, 1(1):33–55.
Palatti, J., Aksjonov, A., Alcan, G., and Kyrki, V. (2021).
Planning for safe abortable overtaking maneuvers in
autonomous driving. In 2021 IEEE International In-
telligent Transportation Systems Conference (ITSC),
pages 508–514. IEEE.
Schwarting, W., Alonso-Mora, J., and Rus, D. (2018). Plan-
ning and decision-making for autonomous vehicles.
Annual Review of Control, Robotics, and Autonomous
Systems, 1(1):187–210.
Wang, J., Chu, L., Zhang, Y., Mao, Y., and Guo, C.
(2023). Intelligent vehicle decision-making and tra-
jectory planning method based on deep reinforcement
learning in the frenet space. Sensors, 23.
Wang, M., Zhang, L., Wang, Z., Sai, Y., and Chu, Y.
(2019). A real-time dynamic trajectory planning for
autonomous driving vehicles. In 3rd Conference on
Vehicle Control and Intelligence, CVCI 2019.
Werling, M., Ziegler, J., Kammel, S., and Thrun, S. (2010).
Optimal trajectory generation for dynamic street sce-
narios in a frenet frame. In 2010 IEEE international
conference on robotics and automation, pages 987–
993. IEEE.
Wu, J., Wang, Y., Shen, Z., Wang, L., Du, H., and Yin, C.
(2021). Distributed multilane merging for connected
autonomous vehicle platooning. Science China Infor-
mation Sciences, 64(11):212202.
Xie, S., Hu, J., Bhowmick, P., Ding, Z., and Arvin, F.
(2022). Distributed motion planning for safe au-
tonomous vehicle overtaking via artificial potential
field. IEEE Transactions on Intelligent Transporta-
tion Systems, 23.
You, F., Zhang, R., Lie, G., Wang, H., Wen, H., and Xu, J.
(2015). Trajectory planning and tracking control for
autonomous lane change maneuver based on the coop-
erative vehicle infrastructure system. Expert Systems
with Applications, 42(14):5932–5946.
Zhang, Y., Sun, H., Zhou, J., Hu, J., and Miao, J. (2019).
Optimal trajectory generation for autonomous vehi-
cles under centripetal acceleration constraints for in-
lane driving scenarios. In 2019 IEEE Intelligent
Transportation Systems Conference, ITSC 2019.
Local Motion Planning for Overtaking Maneuvers in a Rural Road Environment
227
