
A Case Study in Building 2D Maps with Robots
Theodor-Radu Grumeza
1 a
, Thomas-Andrei Laz
˘
ar
1 b
, Isabela Dr
˘
amnesc
1 c
, Gabor Kusper
2 d
,
Konstantinos Papadopoulos
3 e
, Nikolaos Fachantidis
3 f
and Ioannis Lefkos
3 g
1
Department of Computer Science, West University of Timisoara, Romania
2
Department of Computer Science, Eszterhazy Karoly Catholic University, Eger, Hungary
3
Laboratory of Informatics and Robotics Applications in Education and Society (LIRES), University of Macedonia,
Thessaloniki, Greece
Keywords:
2D Maps Generation, Noise Reduction, Clustering, LiDAR, Sonar, Agilex, Scout Mini, Pepper Robot.
Abstract:
In this paper, the authors are doing experimental work on generating 2D maps using the Agilex Scout Mini
to utilize Pepper as an autonomous robot for guiding individuals within their university. This necessity arises
from the lack of environmental data required for Pepper’s navigation. Accurate and detailed maps are im-
portant for Pepper to orient itself effectively and provide reliable guidance. This process involves equipping
Pepper to explore and document the university’s physical layout, enabling autonomous movement and precise
assistance for people. Key considerations include determining potential issues when using the two robots, the
Scout with LiDAR and Pepper with Sonar, for map generation. Selecting an appropriate algorithm for noise
reduction in the mapping points is a key feature for ensuring high–quality maps.
1 INTRODUCTION
The importance of 2D robotic mapping (Thrun, 2003)
lies in the necessity for robots to understand their en-
vironment to perform their functions effectively. A
well-constructed 2D map allows robots to navigate,
make decisions, and interact with their surroundings
more efficiently.
2D maps can be categorized into two main types:
absolute and relative. Absolute maps consist of Points
of Interest (POIs) with known GPS coordinates, accu-
rate to a certain degree. In the case of relative maps,
POIs do not have specific GPS coordinates. Instead,
the map provides the relative distances and directions,
i.e., vectors between POIs. This type of mapping is
useful when GPS data is unavailable, like in the case
of indoor navigation.
To create an absolute map, a GPS receiver with
Real-Time Kinematic (RTK) corrections is required,
a
https://orcid.org/0009-0008-7709-9885
b
https://orcid.org/0009-0005-4745-2260
c
https://orcid.org/0000-0003-4686-2864
d
https://orcid.org/0000-0001-6969-1629
e
https://orcid.org/0009-0008-4999-1518
f
https://orcid.org/0000-0002-8838-8091
g
https://orcid.org/0000-0002-1895-4588
which allows an accuracy within 3-4 centimeters. For
instance, in agricultural robotics (Blackmore et al.,
2005), having a spatial database with the GPS coor-
dinates of the fields to be cultivated is crucial. Such a
database contains multiple layers, each with different
types of data (e.g., parcel information, soil humidity,
and soil quality), all linked to GPS coordinates.
The Pepper robot is an excellent social robot re-
leased by Aldebaran Robotics that can be used in our
universities to interact with people and to assist and
guide people indoors (Suddrey et al., 2018). Mak-
ing Pepper autonomous is a big challenge due to the
hardware and software limitations. There are several
aspects to take into consideration:
• Can the robots be used to guide someone as an
assistant to get from one room to another?
• How can Pepper avoid fixed obstacles and mo-
bile obstacles (e.g., humans) that occur randomly
along the way?
• How will Pepper know the environment (the map
of the building in order to find the way)?
• Can Pepper be used as a scanning device for cre-
ating 2D maps of the building?
• Can a third-party device (Agilex Scout Mini) be
used for mapping the ground floor of a building?
228
Grumeza, T.-R., Laz
ˇ
ar, T.-A., Dr
ˇ
amnesc, I., Kusper, G., Papadopoulos, K., Fachantidis, N. and Lefkos, I.
A Case Study in Building 2D Maps with Robots.
DOI: 10.5220/0013002200003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 228-235
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2 STATE OF THE ART
There are a few fields of robotics which intersect with
our research: Indoor localization, Machine vision,
and Robotic mapping, especially 2D, sensor-based,
and limited hardware robotic mapping.
In the case of indoor localization, one can rely on
WiFi signal strength. By knowing the coordinates of
WiFi routers and using a pre-made heat map, the po-
sition of a robot based on signal strength can be es-
timated. This method involves creating a heat map
of the WiFi signal strengths in different locations and
then using this map to triangulate the robot’s position.
Recent advancements in this area include the use of
machine learning algorithms to enhance localization
accuracy by addressing the signal fluctuation prob-
lems caused by dynamic environmental changes and
shadowing effects (Salamah et al., 2016; Singh et al.,
2021; Ayyalasomayajula et al., 2020; Arvai, 2021).
Other solutions rely on RFID tags, either active
or passive, or beacons. These methods rely on sig-
nal triangulation and distance estimation techniques.
RFID-based localization often involves measuring the
time of flight (TOF) or received signal strength (RSS)
to determine the distance between the robot and the
tags or beacons. Such systems have shown promis-
ing results in enhancing the precision and reliability
of indoor localization (Zhu and Xu, 2019; Arvai and
Homolya, 2019; Arvai and Homolya, 2020).
A state-of-the-art solution combines these ap-
proaches (Kia et al., 2022).
In all these cases, filters like the Kalman filter
(Kalman, 1960) are employed to better estimate the
robot’s position by accounting for statistical noise and
other inaccuracies. This filtering process helps to re-
fine the robot’s localization, improving overall accu-
racy (Ivanov et al., 2018).
Robotic mapping involves various techniques for
creating 2D maps, each with its advantages and lim-
itations. There are various methods for creating 2D
maps.
LiDAR is one of the most prevalent technolo-
gies used in robotic mapping due to its high accuracy
and ability to provide detailed environmental data. It
works by emitting laser beams and measuring the time
it takes for the reflections to return, creating precise
distance measurements. This method is highly effec-
tive in generating detailed and accurate maps, particu-
larly in static and structured environments (Zhang and
Singh, 2014).
Sonar technology uses sound waves to detect and
map surroundings. While it is less accurate than Li-
DAR, it is more cost-effective and can perform well
in certain conditions, such as underwater or in envi-
ronments with a lot of dust or smoke where optical
sensors might struggle (Leonard and Durrant-Whyte,
1991). Since it is less accurate, is less suitable for de-
tailed indoor mapping. Infrared (IR) sensors measure
distances by emitting infrared light and measuring the
reflection. They are commonly used for short-range
detection and are effective in low-light conditions. IR
sensors are often used with other sensors to enhance
the overall mapping accuracy (Benet et al., 2002).
Previous studies on map generation show that gen-
erating maps with Pepper robots involves integrating
sensors like LiDAR, cameras, and Inertial Measure-
ment Units (IMUs) (Mostofi et al., 2014) to create
accurate indoor maps. Up to our knowledge there is
no study on generating maps with Agilex Scout Mini
robot. To import maps into the Pepper robot for au-
tonomous navigation, one can follow the steps based
on integrating ROS (Robot Operating System) (Ma-
censki et al., 2022) with Pepper’s NAOqi framework
as described in the papers (Suddrey et al., 2018).
Our approach differs because the process involves
using Pepper’s Sonar sensor and an Agilex Scout Mini
robot with a LiDAR sensor. Initially, a Python script
using the NAOqi framework allows Pepper to explore
and map its environment. Due to inconsistent Sonar
results, LiDAR from the Scout Mini is utilized for
higher resolution mapping, facilitated by the Robot
Operating System (ROS). Therefore, instead of using
ROS on Pepper, the authors are using a collaborative
robot, Scout Mini to run ROS.
3 THE PROBLEM AND
APPROACH
3.1 Description of the Problem
To utilize Pepper as an autonomous robot for guid-
ing individuals within our university, it is tackled the
challenge of generating 2D maps with robots. The
necessity for creating these maps arises due to the
insufficient data available about the environment in
which the robot is required to navigate. Accurate and
detailed maps are essential for Pepper to orient itself
and provide reliable guidance effectively. The process
involves equipping Pepper with the capability to ex-
plore and document the physical layout of the univer-
sity, ensuring that the robot can autonomously move
and assist people with precise directions.
For the generation of the maps, one needs to take
into consideration that this work does not plan to eval-
uate the SLAM methods like the ones presented in the
previous section, but it aims to examine the following
issues:
A Case Study in Building 2D Maps with Robots
229

• Is there a problem when generating the 2D maps
by having two robots: one equipped with LiDAR
and one equipped with Sonar?
• Which sensor is more reliable and can get more
data to be processed?
• Which algorithm can be used in order to obtain a
good noise reduction for the points that compose
the map?
3.2 Approach
In order to enable Pepper to autonomously move be-
tween rooms, the authors developed a method using
2D maps created with its Sonar sensor. This involved
programming the robot to explore its environment,
map it, and visualize the results through the NAOqi
framework, which supports navigation and motion
control.
The Python script connects to Pepper via its IP ad-
dress and port, utilizing the ‘ALNavigation‘ and ‘AL-
Motion‘ services. After waking up the robot and set-
ting safety distances to prevent collisions, it explores
within a 15m radius, collecting environmental data to
create and save a map. The robot then returns to its
starting point, demonstrating its ability to use the map
for navigation.
For visualizing, the data was processed with
numpy and PIL (Umesh, 2012), by generating an im-
age representation of the explored area. This effective
autonomous mapping and navigation process high-
lighted the capabilities of the NAOqi framework.
Due to inconsistent mapping with the Sonar sen-
sor, we also explored using the Agilex Scout Mini’s
LiDAR sensor for improved resolution. A Python
script utilizing the Robot Operating System (ROS)
was developed to collect and synchronize LiDAR and
odometry data. The script subscribes to the ‘/scan’
and ‘/odom’ topics, allowing us to associate laser scan
measurements with the robot’s position.
Data is processed in real time, converting odome-
try from quaternion to Euler angles for accurate ori-
entation. Buffered data is stored in unique CSV files
to prevent memory overload and facilitate organized
retrieval.
To ensure clarity in the generated maps, we em-
ployed advanced data handling and noise reduc-
tion techniques. Data was processed in manageable
chunks, with x and y coordinates computed from
range and angle measurements. The DBSCAN al-
gorithm (Ester et al., 1996) was implemented to re-
duce noise by identifying valid data clusters and fil-
tering out inaccuracies caused by environmental in-
terferences.
Data Preparation. Points with invalid data, such as
NaN or infinite values, are removed to maintain the
dataset’s integrity. This step ensures that only mean-
ingful data is processed further.
Clustering. The DBSCAN algorithm is applied to
the cleaned data in order to identify and filter out
noise. Points classified as noise are discarded, leaving
only the significant data points that contribute to the
accurate mapping. This method is effective in han-
dling complex and arbitrarily shaped clusters, making
it ideal for Sonar and LiDAR data.
Data Visualization. After processing and filtering
the data, the significant points are concatenated into
a single dataset. The final step involves visualizing
these points using a scatter plot, providing a clear and
accurate representation of the 2D map. This visual-
ization aids in interpreting and analyzing the spatial
data, making it easier to identify key features and pat-
terns.
Importance of Noise Reduction in Sonar and Li-
DAR Scanning. Noise reduction is critical in Sonar
and LiDAR scanning for several reasons. It en-
hances the accuracy of the final map by removing
erroneous readings that can distort the data. By fil-
tering out noise, the map becomes clearer and more
interpretable, allowing for better analysis. Efficient
noise reduction algorithms like DBSCAN also en-
sure robust performance, enabling the processing of
large datasets without compromising on speed or ac-
curacy. Additionally, noise reduction compensates for
environmental factors and sensor limitations, ensur-
ing that the mapped data reflects the true spatial char-
acteristics of the scanned area.
4 EXPERIMENTS WITH
ALDEBARAN ROBOTICS
PEPPER ROBOT
In this study, the Sonar sensor mounted on the Alde-
baran Robotics Pepper robot was employed to scan a
part from the ground floor of the university.
This sensor collected data as float values. The
points were defined by their x and y coordinates,
which denoted the robot’s position within the envi-
ronment.
Key libraries including ‘qi’ for robot-specific
operations, ‘numpy’ for numerical compu-
tations, ‘PIL.Image’ for image processing,
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
230
‘sklearn.cluster.DBSCAN’ for clustering, ‘pan-
das’ for data manipulation, and ‘matplotlib.pyplot’
for plotting were used into the implementation of the
method which helped us to create the maps.
The robot was activated, and safety distances were
set to ensure secure navigation. Orthogonal and tan-
gential safety distances were configured to 0.03 me-
ters and 0.02 meters, respectively. The robot explored
the environment within a 15-meter radius, capturing
spatial data. This exploration data was saved for sub-
sequent analysis.
Localization was initiated to allow the robot to
navigate within the explored map. The robot returned
to its initial position for consistency in data acquisi-
tion. Localization was then terminated.
The metrical map was retrieved, providing pixel
values representing the environment. These pixel val-
ues were converted into an image for visualization us-
ing this formulae:
metric x = x ∗ result map[0] + origin offset[0] (1)
metric y = y ∗ result map[0] +origin offset[1], (2)
where x is the relative position of the robot into the
environment, result map[0] is the resolution of the
map in meters per pixel, and origin offset is the met-
rical offset of the pixel (0, 0) of the map. Free space
within the map was identified based on pixel inten-
sity thresholds. Points representing free space were
extracted and converted into metric coordinates using
the map’s resolution and origin offset.
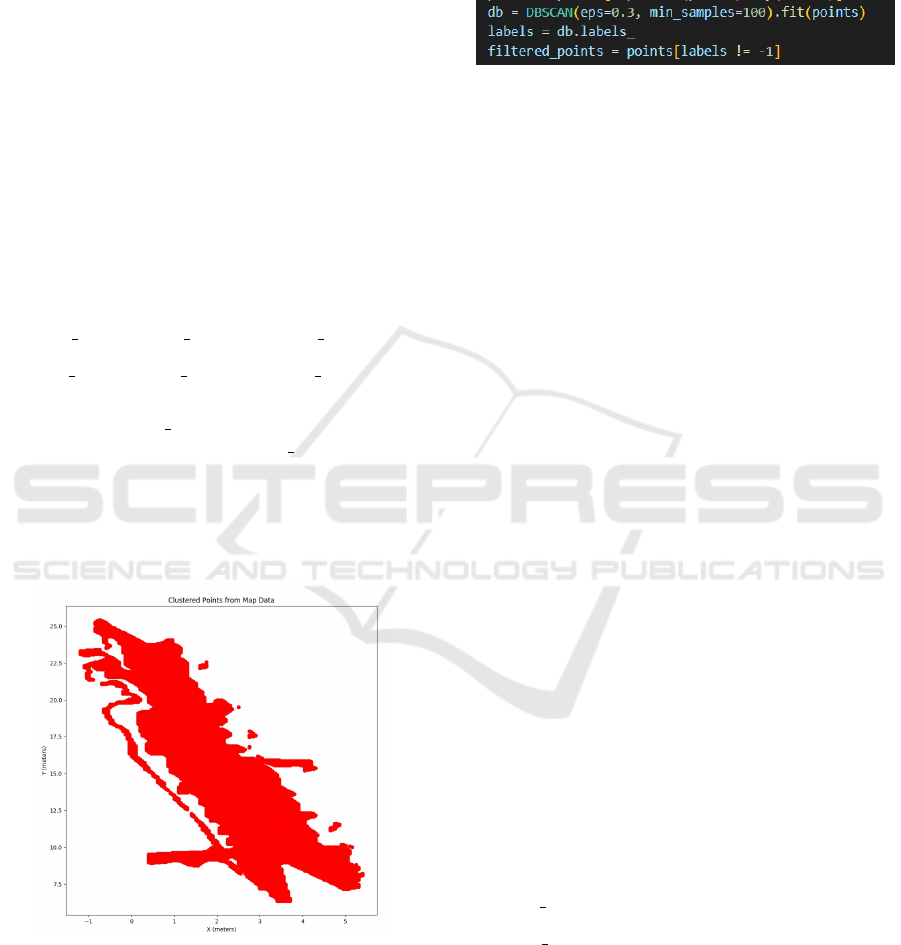
Figure 1: Sonar 2D map created with Pepper robot.
The DBSCAN (Density-Based Spatial Clustering
of Applications with Noise) algorithm (Oliveira and
Marc¸al, 2023) was applied to the extracted points.
This clustering technique identified groups of points
representing free space while filtering out noise. The
algorithm’s parameters included an epsilon value of
0.3 meters and a minimum sample size of 10 points
per cluster. Clustered points were stored in a data
frame and visualized using scatter plots. This pro-
vided a clear representation of navigable areas within
the mapped environment.
Figure 2: The DBSCAN point filtering in Python.
5 EXPERIMENTS WITH AGILEX
SCOUT MINI
In this study, the YDLiDAR G2 was employed
www.ydlidar.com/dowfile.html?cid=1&type=1, a 2D
LiDAR sensor mounted on the Agilex Scout Mini, to
scan the ground floor of the university.
This sensor collected up to 1512 float values per
frame, with each value representing a distinct point.
These points were defined by their x and y coordi-
nates, which denote the robot’s position within the en-
vironment. The collected data points included several
key parameters:
• Range: this value indicates the distance between
the robot and surrounding objects (e.g., walls,
doors, and static objects);
• Theta: this parameter represents the robot’s fu-
ture position, considering its continuous move-
ment during scanning;
• Angle: this is used to determine the angle at which
the LiDAR sensor’s laser beam is reflected from
various environmental points.
Throughout the scanning process, 3,763,368 points
were recorded, each represented as a float value. This
comprehensive data collection provided a detailed
map of the university’s ground floor layout and static
features.
To create the 2D maps, all the gathered points
need to be converted into Cartesian coordinates using
the following two formulae (Shim et al., 2005):
LiDAR x = x + ranges ∗np.cos(theta + angles) (3)
LiDAR y = y + ranges ∗ np.sin(theta + angles) (4)
Formula (3) calculates the x–coordinates of the de-
tected points in the map frame, using the range and
angle to determine the position of each point relative
to the sensor’s position and orientation. Formula (4),
similarly, calculates the y–coordinates of the detected
points.
A Case Study in Building 2D Maps with Robots
231
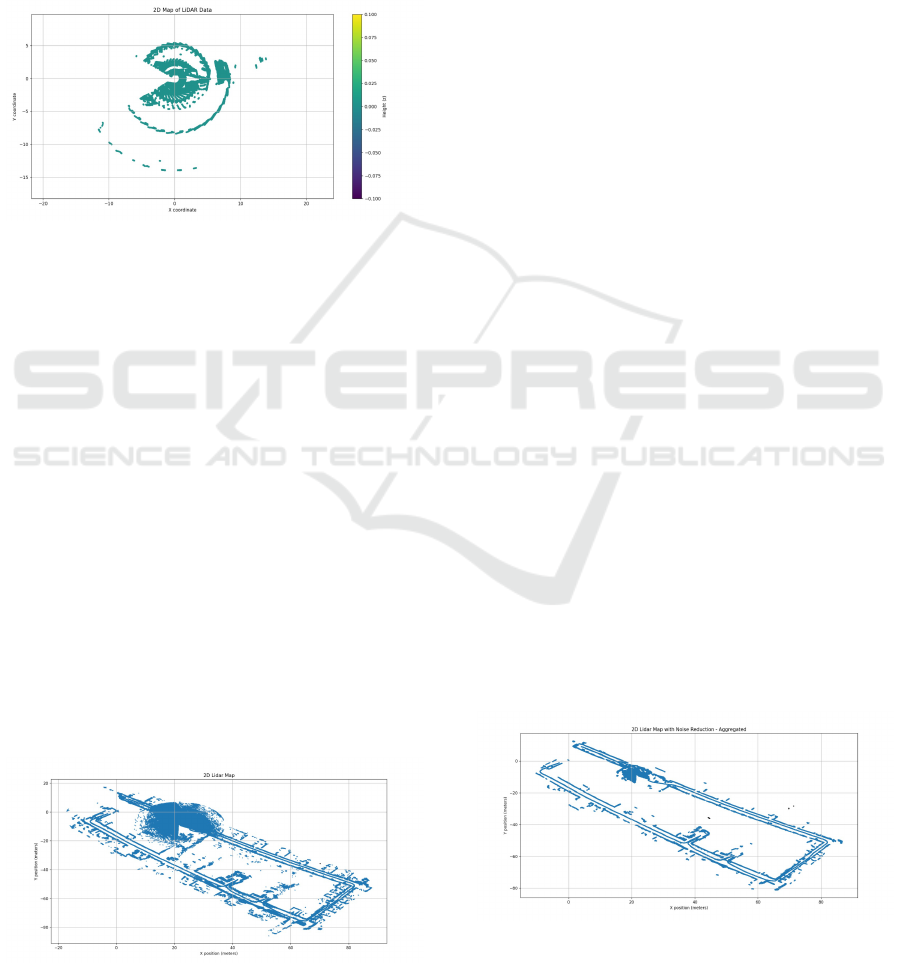
During the initial scanning of the ground floor us-
ing the LiDAR on the Scout Mini as shown in Fig-
ure 3, numerous points were erroneously mapped out-
side the building due to the presence of many win-
dows and glass doors. These external points gener-
ated unexpected noise in the map, potentially causing
issues for the robot’s navigation. Since these points
were included as part of the map, the robot may at-
tempt to navigate along these nonexistent paths, lead-
ing to potential navigation errors.
Figure 3: The first map generated by Scout.
Once the data is ingested, the LiDAR points are
calculated by transforming polar coordinates (range
and angle) into Cartesian coordinates (x and y) rela-
tive to the robot’s position and orientation. This trans-
formation uses the robot’s position, orientation, mea-
sured ranges, and angles to compute the x and y coor-
dinates of the LiDAR points. These calculations are
crucial as they convert the raw LiDAR data into a for-
mat suitable for further processing and visualization.
For the first scanning, only the x and y coordinates
were considered, where the robot’s next position was
not calculated, and it was unclear whether the robot
was stationary or was moving continuously. After
gathering 85.354 total points for the whole map of the
ground floor, it needs to be taken into account all the
values (x, y, Range, Theta, and Angle) such that it will
create a readable map as shown in Figure 4. Here,
the total number of points in the dataset of 3,763,368
points was used, and the map was generated correctly
(in the sense that they look similar to the real maps)
but with a lot of noise.
Figure 4: The LiDAR map without noise reduction.
The proposed method for generating a 2D Li-
DAR map with noise reduction involves several key
steps, each one essential for processing and visualiz-
ing large-scale LiDAR datasets efficiently. Initially,
the data is ingested in manageable chunks of 10.000
points. This chunk processing approach ensures ef-
ficient memory usage and facilitates the handling of
extensive datasets, enabling the processing of LiDAR
data without overwhelming the system’s resources
(Perafan-Lopez et al., 2022).
To address noise in the LiDAR data, the method
employs the DBSCAN (Density-Based Spatial Clus-
tering of Applications with Noise) algorithm (Oliveira
and Marc¸al, 2023). DBSCAN is a clustering algo-
rithm that identifies clusters in data by looking for ar-
eas of high point density. It requires two parameters:
ε (eps), which is the radius for neighborhood points,
and minPts, which is the minimum number of points
to form a dense region. The algorithm starts by select-
ing an unvisited point and checking its neighbourhood
within ε. If the point has at least minPts neighbours,
it becomes a core point and starts forming a cluster by
iteratively adding neighbouring core points and their
neighbours. Points that do not meet this criterion are
labelled as noise, and in Figure 2 is presented a code
snippet, which is responsible for filtering the points
that are out of the cluster. DBSCAN can find clusters
of arbitrary shape and handle noise, making it suitable
for spatial data like LiDAR maps.
The filtered points from each chunk are aggre-
gated into a single dataset, which is then visualized
using a scatter plot. This visualization step creates
a 2D LiDAR map, with points plotted to represent
the scanned environment. By adjusting the trans-
parency of the points, the map provides a clear and
detailed representation of the environment, highlight-
ing the density and distribution of the LiDAR points.
This method’s combination of efficient data process-
ing, noise reduction, and effective visualization re-
sults in a comprehensive and accurate 2D LiDAR map
(see Figure 5).
Figure 5: The LiDAR map with noise reduction.
When creating a 2D LiDAR map, the quality of
clustering results is crucial for accurately identifying
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
232
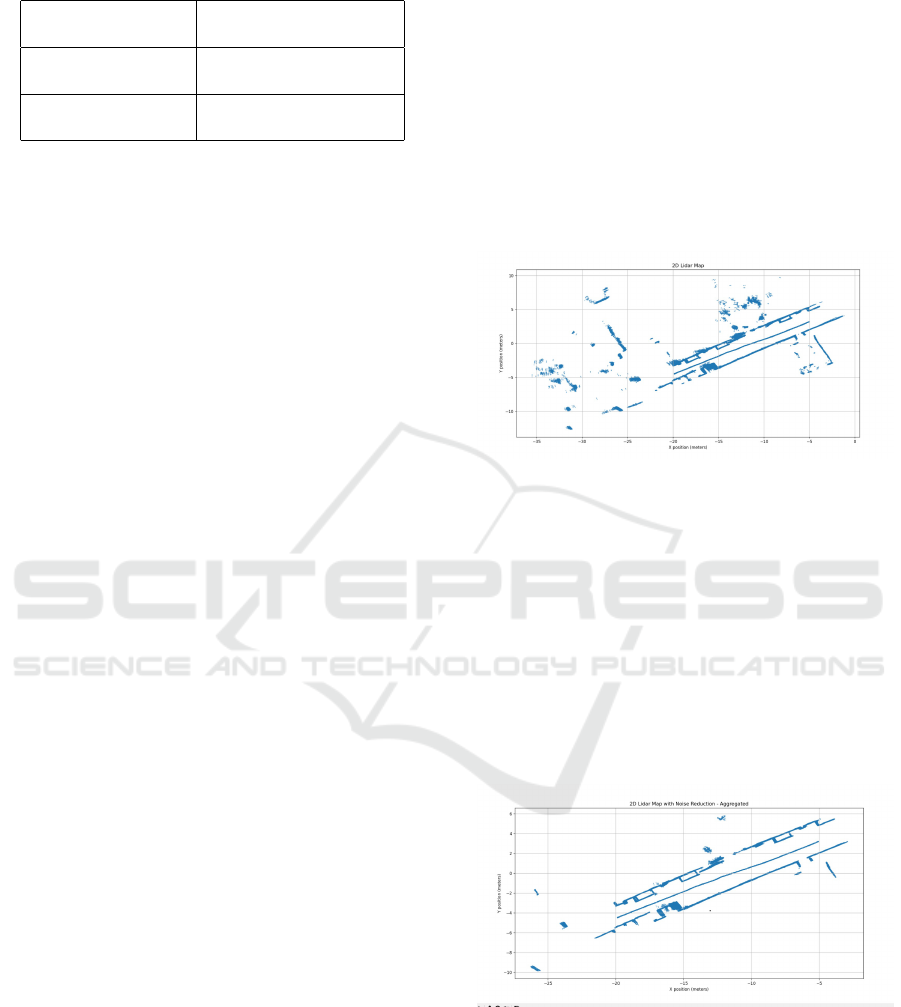
Table 1: Average metrics for ground floor.
Average Silhouette 0.6360463511896636
Score
Average Calinski– 1.753.594.2288643694
Harabasz Index
Average Davies– 0.4843305298989922
Bouldin Index
and separating different objects or features in the envi-
ronment. The provided clustering metrics contribute
to the quality of a 2D LiDAR map as shown in Ta-
ble 1.
Silhouette Score. (Rousseeuw, 1987) helps deter-
mine the cohesion and separation of the clusters in
the 2D LiDAR map. The score ranges from -1 to 1:
1: The sample is far from the neighbouring clusters.
0: The sample is on or very close to the decision
boundary between two neighbouring clusters.
-1: The sample is assigned to the wrong cluster.
The Silhouette score of 0.636 in the context of a 2D
LiDAR map indicates that the points belonging to
each cluster are well-grouped together and distinctly
separated from other clusters. This is important for
accurately identifying different objects or structures,
such as walls and static objects.
Calinski-Harabasz Index. (Wang et al., 2021)
measures the dispersion within and between clusters.
The Calinski-Harabasz Index score of 1.753.594.229
indicates that the clusters are compact and well-
separated. In a 2D LiDAR map, this translates to clear
and distinct boundaries between different objects or
features. Such clear boundaries are essential for ac-
curate mapping and object detection.
Davies-Bouldin Index. (Xiao et al., 2017; Petrovic,
2006) evaluates the average similarity ratio between
clusters. The 0.484 value of the Davies-Bouldin Index
indicates minimal similarity between clusters. For a
2D LiDAR map, the features identified by the clus-
tering algorithm are distinctly different. This distinct
separation ensures that different objects or obstacles
are not misidentified or merged, enhancing the relia-
bility of the map.
6 COMPARISON OF RESULTS
To achieve a more accurate comparison of the two
2D maps generated using the LiDAR and those with
the Sonar sensor, a second scanning operation was
conducted where only 15 meters of the building’s
ground floor was scanned using the LiDAR, as shown
in Figures 6 and 7. The LiDAR scanning process is
more complex, taking into account multiple parame-
ters such as x, y, Theta, Angle, and Range. In contrast,
the Sonar sensor only collects x and y coordinates,
resolution, and offset. The data collected using the
Pepper robot’s Sonar sensor are inconsistent, show-
ing clusters with points that do not exist on the map.
Consequently, these clusters are neither well-defined
nor precise, leading to a loss of coherence in the 2D
map creation.
Figure 6: Partial LiDAR map without noise reduction.
Both LiDAR and Sonar–based mapping share key
steps. For data collection, LiDAR captures up to
1512 float values per frame, generating a high vol-
ume of data, while Sonar collects data within a 15m
radius, but only 0.5m at a time. In data conversion, Li-
DAR uses range and angle for Cartesian coordinates,
whereas Sonar converts pixel values into metric co-
ordinates based on resolution and origin offset. Both
approaches utilize the DBSCAN algorithm for noise
reduction, filtering out outliers. Processed data is vi-
sualized via scatter plots to highlight navigable areas
(Oliveira and Marc¸al, 2023).
Figure 7: Partial LiDAR map with noise reduction.
The mapping results differ notably between the
two approaches. LiDAR with the Scout Mini Robot
yields high resolution with 3,763,368 points, captur-
ing detailed features like walls and doors. Initial noise
from reflective surfaces was mitigated by DBSCAN,
resulting in well-defined clusters (Silhouette Score:
0.636, Calinski-Harabasz Index: 79,720.67, Davies-
A Case Study in Building 2D Maps with Robots
233

Table 2: Average metrics for 15m of ground floor.
Average Silhouette 0.6304812788202012
Score
Average Calinski– 79,720.67387352433
Harabasz Index
Average Davies– 0.4860425979366158
Bouldin Index
Bouldin Index: 0.484).
Conversely, Sonar mapping with the Pepper Robot
has lower resolution due to a half-meter scanning
limit, suitable for simpler environments. Despite us-
ing DBSCAN for noise filtering, Sonar maps are less
precise. The clustering involved converting pixel val-
ues into metric coordinates, resulting in lower preci-
sion for navigable areas.
LiDAR excels in high-resolution mapping and
complex environments, though it faces noise chal-
lenges and requires complex processing. Sonar is ef-
fective for basic navigation in simpler settings, with
lower computational demands but also reduced detail
and effectiveness.
In summary, while both methods follow similar
processes, LiDAR offers superior detail and accuracy
for complex environments, while Sonar is suited for
simpler navigation tasks.
The average metrics were successfully obtained
using the LiDAR for 15m scanning, as presented in
Table 2.
This was possible because the data was initially
stored in the robot and then processed on a separate
computational machine. However, all computations
were performed directly on the Pepper robot’s hard-
ware. Consequently, these metrics could not be ob-
tained due to the inability to remove noise from the
map.
7 CONCLUSIONS AND FUTURE
WORK
This paper presents several contributions, aiming to
utilize Pepper as an autonomous robot for guiding in-
dividuals within a university environment, where the
challenge of generating 2D maps was tackled. The
necessity for creating these maps arises due to the
insufficient data available about the environment in
which the robot is required to navigate. Accurate
and detailed maps are essential for Pepper to orient
itself and provide reliable guidance effectively. In
this process, Pepper will be used to explore and doc-
ument the university’s environment, make the robot
autonomously move, and assist people with accurate
directions.
Our approach demonstrated that while Pepper’s
built-in Sonar sensor can create basic maps, an Agilex
Scout Mini robot with a LiDAR sensor significantly
enhances map resolution and reliability. By imple-
menting a ROS-based system to synchronize and log
LiDAR and odometry data, robust data collection for
accurate mapping was ensured.
In future work, the authors would also like to use
an algorithm like A* or Dijkstra to calculate the short-
est path the robot can take to get from one point to
another. Crowd control is also an important step in
recognizing people that are moving into the environ-
ment such that the robot will avoid them.
In order to have a correct interpretation of the
data, formally verifying the DBSCAN algorithm for
LiDAR maps it is important to ensure its reliability
and robustness. LiDAR maps provide detailed spa-
tial data, and any errors in clustering could lead to
significant misinterpretations of the environment, po-
tentially causing safety risks or incorrect decisions.
By using formal methods to verify the algorithm, it
can be mathematically proven that DBSCAN will cor-
rectly and consistently identify clusters, handle noise,
and perform as expected under various conditions.
This verification process helps build trust in the algo-
rithm’s outputs, ultimately contributing to safer and
more efficient use of LiDAR technology.
ACKNOWLEDGEMENTS
This work is co-funded by the European Union
through the Erasmus+ project AiRobo: Artificial
Intelligence-based Robotics, 2023-1-RO01-KA220-
HED-000152418.
REFERENCES
Arvai, L. (2021). Convolutional neural network-based ac-
tivity monitoring for indoor localization. Pollack Pe-
riod., 16(3):7–12.
Arvai, L. and Homolya, S. (2019). Filtering and fingerprint
matching methods for Wi-Fi radio map based indoor
localization. In 2019 20th International Carpathian
Control Conference (ICCC). IEEE.
Arvai, L. and Homolya, S. (2020). Efficient radio map
update algorithm for indoor localization. In 2020
21th International Carpathian Control Conference
(ICCC). IEEE.
Ayyalasomayajula, R., Arun, A., Wu, C., Sharma, S., Sethi,
A. R., Vasisht, D., and Bharadia, D. (2020). Deep
learning based wireless localization for indoor naviga-
tion. In Proceedings of the 26th Annual International
Conference on Mobile Computing and Networking,
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
234

MobiCom ’20, New York, NY, USA. Association for
Computing Machinery.
Benet, G., Blanes, F., Sim
´
o, J. E., and P
´
erez, P. (2002).
Using infrared sensors for distance measurement in
mobile robots. Robotics and Autonomous Systems,
40(4):255–266.
Blackmore, S., Stout, B. A., Wang, M., Runov, B. I., and
Stafford, J. V. (2005). Robotic agriculture - the future
of agricultural mechanisation? In In Proceedings of
European Conference on Precision Agriculture 2005,
pages 621–628.
Ester, M., Kriegel, H.-P., Sander, J., Xu, X., et al. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In kdd, volume 96,
pages 226–231.
Ivanov, P., Raitoharju, M., and Pich
´
e, R. (2018). Kalman-
Type Filters and Smoothers for Pedestrian Dead
Reckoning. In 2018 International Conference on In-
door Positioning and Indoor Navigation (IPIN), pages
206–212.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Journal of Basic Engineer-
ing, 82(1):35–45.
Kia, G., Ruotsalainen, L., and Talvitie, J. (2022). Toward
Accurate Indoor Positioning: An RSS-Based Fusion
of UWB and Machine-Learning-Enhanced WiFi. Sen-
sors, 22(9).
Leonard, J. J. and Durrant-Whyte, H. (1991). Mobile robot
localization by tracking geometric beacons. IEEE
Transactions on Robotics and Automation, 7(3):376–
382.
Macenski, S., Foote, T., Gerkey, B., Lalancette, C., and
Woodall, W. (2022). Robot Operating System 2:
Design, architecture, and uses in the wild. Science
Robotics, 7(66):eabm6074.
Mostofi, N., Elhabiby, M., and El-Sheimy, N. (2014). In-
door localization and mapping using camera and iner-
tial measurement unit (IMU). In 2014 IEEE/ION Po-
sition, Location and Navigation Symposium-PLANS
2014, pages 1329–1335. IEEE.
Oliveira, M. I. and Marc¸al, A. R. (2023). Clustering LiDAR
Data with K-means and DBSCAN. In ICPRAM, pages
822–831.
Perafan-Lopez, J. C., Ferrer-Gregory, V. L., Nieto-
Londo
˜
no, C., and Sierra-P
´
erez, J. (2022). Perfor-
mance Analysis and Architecture of a Clustering Hy-
brid Algorithm Called FA+GA-DBSCAN Using Arti-
ficial Datasets. Entropy, 24(7):875.
Petrovic, S. (2006). A comparison between the silhouette
index and the davies-bouldin index in labelling ids
clusters. In Proceedings of the 11th Nordic workshop
of secure IT systems, volume 2006, pages 53–64. Cite-
seer.
Rousseeuw, P. (1987). Rousseeuw, P.J.: Silhouettes: A
Graphical Aid to the Interpretation and Validation of
Cluster Analysis. Journal of Computational and Ap-
plied Mathematics, 20:53–65.
Salamah, A. H., Tamazin, M., Sharkas, M. A., and Khedr,
M. (2016). An enhanced WiFi indoor localization sys-
tem based on machine learning. In 2016 International
Conference on Indoor Positioning and Indoor Naviga-
tion (IPIN), pages 1–8.
Shim, Y., Chung, J., and Choi, I.-C. (2005). A Comparison
Study of Cluster Validity Indices Using a Nonhierar-
chical Clustering Algorithm. In International Con-
ference on Computational Intelligence for Modelling,
Control and Automation and International Confer-
ence on Intelligent Agents, Web Technologies and
Internet Commerce (CIMCA-IAWTIC’06), volume 1,
pages 199–204.
Singh, N., Choe, S., and Punmiya, R. (2021). Ma-
chine Learning Based Indoor Localization Using Wi-
Fi RSSI Fingerprints: An Overview. IEEE Access,
9:127150–127174.
Suddrey, G., Jacobson, A., and Ward, B. (2018). Enabling
a Pepper Robot to provide Automated and Interactive
Tours of a Robotics Laboratory. In Proceedings of
the Australasian Conference on Robotics and Automa-
tion (ACRA 2018). Australian Robotics and Automa-
tion Association (ARAA), Australia.
Thrun, S. (2003). Robotic mapping: a survey. Morgan
Kaufmann Publishers Inc.
Umesh, P. (2012). Image Processing in Python. CSI Com-
munications, 23.
Wang, J., Zhang, W., Hua, T., and Wei, T.-C. (2021). Un-
supervised learning of topological phase transitions
using the Calinski-Harabaz index. Phys. Rev. Res.,
3:013074.
Xiao, J., Lu, J., and Li, X. (2017). Davies Bouldin Index
based hierarchical initialization K-means. Intelligent
Data Analysis, 21(6):1327–1338.
Zhang, J. and Singh, S. (2014). LOAM: Lidar Odometry
and Mapping in Real-time. In Robotics: Science and
Systems.
Zhu, J. and Xu, H. (2019). Review of RFID-Based In-
door Positioning Technology. In Barolli, L., Xhafa, F.,
Javaid, N., and Enokido, T., editors, Innovative Mo-
bile and Internet Services in Ubiquitous Computing,
pages 632–641, Cham. Springer International Pub-
lishing.
A Case Study in Building 2D Maps with Robots
235
