
Applying a Systematic Approach to Design Human-Robot Cooperation
in Dynamic Environments
Sridath Tula
1,2
, Marie-Pierre Pacaux-Lemoine
1
, Emmanuelle Grislin-Le Strugeon
1,3
,
Anna Ma-Wyatt
2,4
and Jean-Philippe Diguet
2
1
UPHF, CNRS, UMR 8201-LAMIH, Valenciennes, France
2
CNRS, IRL 2010 CROSSING, Adelaide, Australia
3
INSA Hauts-de-France, Valenciennes, France
4
The University of Adelaide, South Australia, Australia
Keywords:
Human-Robot Cooperation, Human-Robot Interfaces, Autonomous Agents, Mobile Robots, Human-Robot
Teaming, Control and Supervision Systems.
Abstract:
This paper introduces a framework to enhance Human-Robot Cooperation in high-risk environments by
leveraging a grid-based analysis. By integrating the concepts of Know-How-to-Operate and Know-How-
to-Cooperate, the framework aims to balance and streamline cooperation strategies. The framework proposes
grid-based configurations to identify agent competencies, manage resources, and dynamically allocate tasks.
The study details first the framework, then shows how it can be applied to a team made of one human and two
robots in a search-and-rescue context.
1 INTRODUCTION
Effective cooperation between humans and robots
is essential in dynamic and high-risk environments
(Bravo-Arrabal et al., 2021) to ensure efficient re-
sponses to complex situations such as fires and
search and rescue missions (Vera-Ortega et al., 2022).
Human-Robot (H-R) cooperation takes advantage of
the distinct strengths of both fields, combining human
intelligence and flexibility with robotic accuracy and
endurance. This mutual interaction not only increases
responders’ safety but also enhances overall outcomes
in dangerous circumstances.
Current techniques often emphasize full auton-
omy (Wijayathunga et al., 2023), frequently overlook-
ing the unique benefits that human operators bring
to the cooperative framework. Indeed, Autonomous
robots excel at navigating hazardous environments,
but human judgments based on global knowledge and
experience are vital for adapting to unforeseen events
(Li et al., 2023). However, optimizing cooperation
between human operators and autonomous robots in
hazardous conditions raise multiple complex ques-
tions.
Designing effective H-R teams presents several
challenges. One key difficulty lies in fusing human
cognitive strengths with robotic functionalities to op-
timize task performance, efficiency, and interaction
intuitiveness (Goodrich et al., 2008). This involves
determining the right balance between autonomy and
control sharing between humans and robots. Addi-
tionally, human factors such as cognitive limitations
and potential biases need to be considered alongside
technical limitations in real-time communication and
coordination (Mostaani et al., 2022). Furthermore,
unforeseen events in dynamic environments can dis-
rupt established communication protocols, rendering
robotic systems unusable or limiting their function-
ing, requiring H-R teams to adapt and react seam-
lessly (Nourbakhsh et al., 2005). Integrating human
judgment and decision-making with robotic capabil-
ities becomes crucial, particularly in high-risk situa-
tions where quick and accurate responses are essential
(Filip, 2022).
Recent advances in human-robot cooperation ar-
chitectures and frameworks, such as the use of
AND/OR graphs and hierarchical models, have been
developed to better integrate human flexibility with
robotic precision (Murali et al., 2020). These sys-
tems aim to facilitate smoother interactions by en-
248
Tula, S., Pacaux-Lemoine, M.-P., Grislin-Le Strugeon, E., Ma-Wyatt, A. and Diguet, J.-P.
Applying a Systematic Approach to Design Human-Robot Cooperation in Dynamic Environments.
DOI: 10.5220/0013008500003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 248-255
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

abling robots to predict and adapt to human actions,
and by validating cooperation with up-to-date infor-
mation through digital twins and other virtual systems
(Darvish et al., 2020).
While these digital twin systems provide impor-
tant advantages, our study takes a different approach
by presenting a comprehensive Human Machine Co-
operation model (Pacaux-Lemoine and Vanderhae-
gen, 2013) adapted for human-robot cooperation and
its implementation using a grid-based architecture.
The HMC model analyzes the complexity of human-
robot cooperation, focusing on its importance in a va-
riety of situations, especially those requiring search
and rescue missions. By exploring the design and
functionality of this cooperation model grid, we in-
tend to see its usefulness in increasing cooperation,
decision-making, and communication within the H-R
teams in dynamic and challenging situations. Further-
more, the purpose of this study is to uncover any pos-
sible failure situation in the model that may impact
H-R cooperation.
In the following sections, we will further explain
the model, exploring the frameworks that underlie
human-robot cooperation and the role of the grid in
facilitating the design of seamless cooperation among
agents. By leveraging structured human-robot coop-
eration architectures and grid analysis, we aim to con-
tribute to the development of more effective and re-
silient human-robot teams in critical situations.
2 BACKGROUND
Successful cooperation between human operators and
autonomous robots is critical for attaining com-
mon goals in tough situations. Human-robot inter-
action (HRI) and human-robot teaming (HRT) in-
volve communication, coordination, and interaction
to enable successful cooperation in complicated con-
texts (Paliga, 2022). Understanding the complex-
ities of this cooperation requires a comprehensive
analysis on both HRI and HRT frameworks. There-
fore, this section will explore the current state-
of-the-art in both areas, followed by an examina-
tion of the Human-Machine System (HMS) domain,
specifically focusing on the capabilities, Know-How-
to-Operate (KHO) and capabilities, Know-How-to-
Cooperate (KHC) model.
2.1 Cooperation in the Human-Robot
Interaction Domain
While traditional HRI research focused on develop-
ing interfaces and communication protocols (Mizrahi
et al., 2020), there’s a growing emphasis on under-
standing and incorporating human cognitive aspects
like situational awareness, trust, and decision-making
into robot design. This shift reflects the understanding
that successful human-robot teaming requires robots
that can not only perform tasks but also collaborate
effectively with humans in complex environments.
The prominent areas of exploration within HRI
are HRT or Human–Autonomy Teaming (O’Neill
et al., 2022). HRT research focuses on developing
robots that can act as teammates, understanding hu-
man intentions, anticipating needs, and adapting to
changing situations (Li et al., 2023). This cooperative
approach has the potential to significantly enhance ef-
ficiency and performance in various applications.
However, current research focuses predominantly
on physical human-robot cooperation (Aronson et al.,
2018), leaving a significant gap in addressing the cog-
nitive elements of human-robot interaction (Jiang and
Arkin, 2015). Identifying the limitations of current
methodologies, three key challenges emerge (Tula
et al., 2024):
Lack of Swift Human Decisions: Autonomous
robots often struggle with rapid decision-making in
dynamic situations. Human operators, with their
cognitive abilities and field knowledge, can respond
quickly to unexpected events (Chella et al., 2018).
Complex Sensor Data Interpretation: Au-
tonomous robots may face difficulties analyzing and
interpreting complex sensor data. Human operators
excel in understanding global information at a
cognitive level, making their presence essential in
navigating complex scenarios where sensor data
alone is insufficient (Mizrahi et al., 2020).
Communication Weakness between Humans and
Robots: Effective communication between humans
and robots is essential for successful cooperation.
Current approaches often exhibit weaknesses in es-
tablishing robust communication channels, hinder-
ing the seamless exchange of critical data necessary
for cooperative decision-making (Grislin-Le Strugeon
et al., 2022).
2.2 Cooperation in the Human-Machine
System Domain
More generally, the concept of cooperation between
humans and machines has evolved greatly through-
out time, owing to technological improvements and a
better knowledge of human factors. Early techniques
focused on automating specific tasks with robots act-
ing as machines controlled by humans. As technology
evolved, the emphasis switched to developing more
interactive systems in which robots could help peo-
Applying a Systematic Approach to Design Human-Robot Cooperation in Dynamic Environments
249

ple with real-time data and analysis (Alirezazadeh and
Alexandre, 2022). This growth resulted in the cre-
ation of collaborative systems in which humans and
robots operate smoothly together, using each other’s
competencies. Modern HMS research focuses on the
integration of cognitive and autonomous capacities in
robots (Hoc, 2001), allowing for more complex inter-
actions and cooperation.
The state of the art in Human-Machine Sys-
tems (HMS) (Pacaux-Lemoine, 2020) focuses on
diverse ways to improve human-machine interac-
tion, highlighting both technology developments and
human-centered design principles. Researchers cre-
ated models to better understand the dynamics of
these interactions. One such principle in this field is
the Know-How-to-Operate (KHO) and Know-How-
to-Cooperate (KHC) model developed by (Pacaux-
Lemoine et al., 2023). This framework analyzes
human-machine cooperation by dividing it into two
key categories: i) KHO focuses on an agent’s (hu-
man or machine) ability to perform individual tasks.
It involves a four-step process: Information Gather-
ing (IG), Information Analysis (IA), Decision Selec-
tion (DS), and Action Implementation (AI); ii) KHC
tackles how agents interact and coordinate actions.
Similarly to KHO, it involves four steps: Information
Gathering on Other Agents (IGO) to understand their
capabilities, Interference Detection (ID) to identify
potential conflicts, Interference Management (IM) to
resolve conflicts and optimize cooperation, and fi-
nally, Function Allocation (FA) to assign tasks to the
most suitable agent (human or machine).
The KHO-KHC structured approach offers a plat-
form for organizing agent roles, accelerating infor-
mation flow, and optimizing task allocation within
Human-Robot Cooperation. By defining individual
and cooperative functionalities, this approach pro-
vides a framework to enhance cooperation between
humans and robots.
3 GRID-BASED ANALYSIS
This section describes a systematic approach to
establishing cooperation-related characteristics for
Human-Robot (H-R) teams that employs a grid archi-
tecture. The goal is to aid the designer in analysis by
thoroughly understanding each agent’s role, interac-
tions, and capabilities within the cooperative environ-
ment. The subsections that follow detail the contents
of the grid, the grid filling process, the organization’s
dynamic adaptability, and the potential benefits of the
grid support.
3.1 Grid Description
The grid framework is divided into four quadrants,
each reflecting a different facet of cooperation be-
tween the human operator and the robots. The reason
for specifically mentioning robots is that the abilities
of two robots are generally similar, making it simpler
to consider them together (in Table 1). The top left
quadrant handles cooperation based on each agent’s
ability to interact with the environment or process,
such as individual task accomplishment and environ-
mental interaction. The top right quadrant, known as
KHC-human, enables the human operator to access
the robots’ behavior or condition depending on the
situations, determining the human agent’s capabili-
ties. The lower left quadrant, known as KHC-robot,
allows robots to interact with human operator depend-
ing on the specific situation in a scenario, establishing
the robot agent’s competencies. Finally, the bottom
right quadrant focuses on cooperation between both
agents in terms of abilities like information sharing,
task sharing, allocation and, coordination, using the
common workspace to communicate and store essen-
tial information or cooperation needed for a situation
in an aftermath scenario such as a fire accident. A
Common Workspace acts as the hub for all interac-
tions, ensuring that all agents have access to shared in-
formation and can coordinate their efforts efficiently.
3.2 Steps to Fill the Grid
Filling the quadrants involves a detailed process. The
grid is meant to be filled by the system designer and
to support the identification of the task that the human
operator will complete according to the situation.
To begin, the roles and competencies of the agents
must be determined. The Human Operator is in
charge of decision-making, task distribution, and in-
terfacing with other agents. Sensors, actuators, and
autonomous capabilities enable the robots to collect
information, maneuver, and complete tasks.
Step 1: In the top left quadrant, focusing on Know-
How-to-Operate (KHO) aspects, tasks include infor-
mation gathering IG, where both the human opera-
tor and robots could gather relevant data from the
environment; information analysis IA, where both
agents’ process and interpret the gathered informa-
tion to make informed decisions specific to their own
tasks; decision selection DS, choosing the most suit-
able course of action based on analyzed information
about their own area of authority; and Action im-
plementation AI, executing the chosen actions effec-
tively to complete their parts of the overall task.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
250
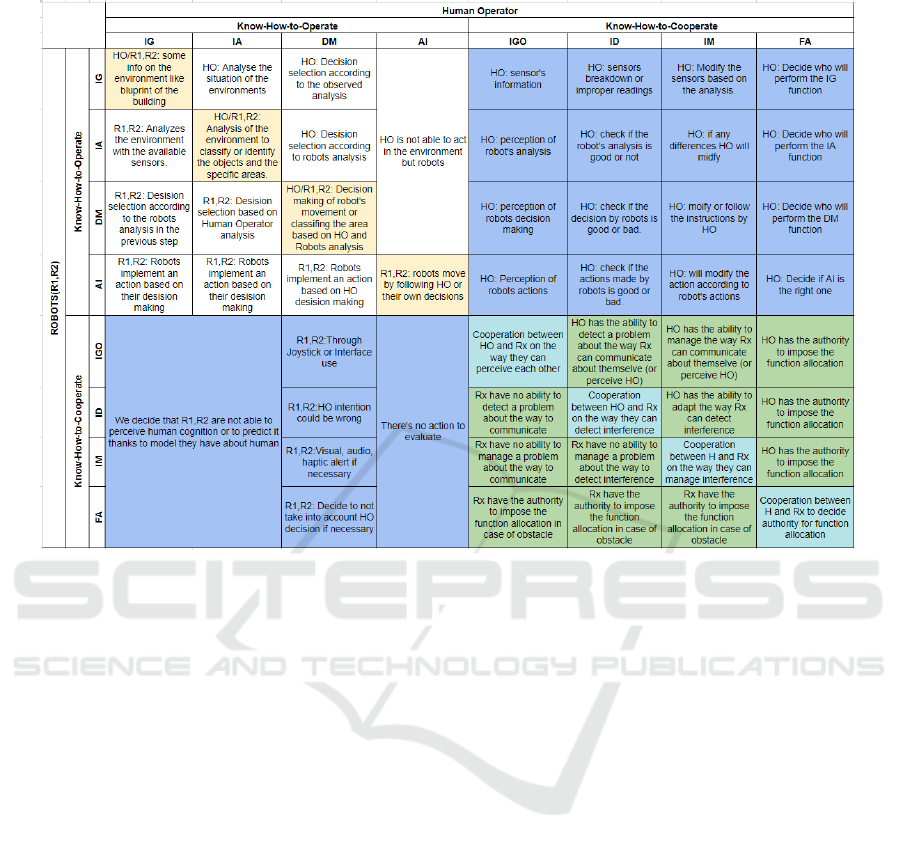
Table 1: KHO & KHC grid for a team of 1 Human operator, and 2 Robots agents’.
Step 2 & 3: The Know-How-to-Cooperate (KHC)
components are addressed from both the human and
robot perspectives to ensure effective coordination.
From the human perspective (Step 2), tasks involve
information gathering (IGO) on the robots’ actions
and intentions, interference detection (ID) to identify
potential conflicts arising from the combined actions
of multiple agents, interference management (IM) to
resolve these conflicts for smooth and coordinated
task execution, and function allocation (FA) to assign
tasks and responsibilities among the agents for opti-
mal team performance. Similarly, from the robot per-
spective (Step 3), tasks include gathering information
on the human operator’s actions and intentions, de-
tecting potential conflicts due to the human operator’s
actions, managing these interferences to ensure seam-
less task execution, and allocating functions to opti-
mize overall team performance. The key difference
between these steps lies in the perspective: Step 2 em-
phasizes the human operator’s view of understanding
and managing robot interactions, while Step 3 focuses
on the robot’s view of understanding and human inter-
actions.
Step 4. The bottom right quadrant focuses on the
control of the cooperation between human operator
and robots. Tasks include shared information gather-
ing, where both agents gather and share information
relevant to the overall task; shared decision making, a
cooperative decision-making process considering in-
puts from both agents; and shared action implementa-
tion, executing tasks cooperatively to ensure coordi-
nated efforts and mutual support.
3.3 Dynamic Adaptation
Dynamic adaptability is critical for maintaining effec-
tive teamwork in changing circumstances. This in-
cludes real-time monitoring of the environment and
agent status, as well as continuous feedback loops to
alter actions and tactics in response to new informa-
tion. Adaptive task allocation enables the dynamic
redistribution of tasks depending on the current situ-
ation and agent capabilities. Situation-based adjust-
ments employ predetermined cases to guide initial
task allocation and cooperation, which may be modi-
fied based on real-time data. Regular training sessions
for human operators and robots will enhance team-
work abilities and enable the assessment of the coop-
eration model using the grid in various circumstances.
The grid provides a unique viewpoint on dynamic
adaptation. By examining the capabilities and ca-
pacities of human and robot agents inside the KHC-
human and KHC-robot quadrants (see Table 1), the
grid makes it easier to identify strengths and weak-
Applying a Systematic Approach to Design Human-Robot Cooperation in Dynamic Environments
251

nesses for appropriate work allocation. This approach
promotes a better knowledge of human-robot capabil-
ities, allowing designers to strategically assign tasks
based on real-time data. Furthermore, the grid pro-
motes flexible and responsive cooperation by allow-
ing for dynamic allocation of workload based on
predetermined situations and real-time modifications.
It’s also a useful tool for designers and developers.
Designers can define approaches to cooperation in-
side the grid to create specific parameters for inter-
action between humans and robots. Furthermore, the
grid may be utilized to develop the needed functions
for agent capabilities and incorporate these abilities
towards cooperation.
3.4 Implementation and Evaluation
Proof-of-concept experiments in crisis scenarios,
such as fires or post-earthquake settings, should be
conducted to evaluate agent cooperation under vari-
ous configurations. Tasks will range from simple nav-
igation to complex pick-and-place actions, support-
ing both human and robot agents. Evaluation metrics
will include reaction time, event detection precision,
navigation accuracy, and task management, along-
side subjective feedback from Human-Robot Interac-
tion surveys to assess cooperation and system useful-
ness. Comparative analyses between scenarios with
and without the cooperative model will highlight its
benefits, focusing on agent skills, responsibilities, and
results.
The grid framework is crucial in these evaluations,
structuring interactions and task assignments based
on agent roles and capabilities. Metrics such as re-
action time and navigation accuracy directly correlate
with the grid’s efficacy. Feedback from these evalua-
tions will refine the grid, creating a feedback loop that
enhances overall system performance.
3.5 Grid Analysis Aids Cooperation
The grid analysis enables the identification of agent
competencies. Typically, the system designer creates
the grid to identify, manage, and allocate the roles and
actions of the agents. Each cell represents a distinct
interaction between agents, simplifying the identifica-
tion of their competencies. For example, in a search
and rescue effort, a human operator might examine
blueprints to identify areas of interest, while robots
use sensors to detect objects and navigate effectively.
Resource management is another important fea-
ture of the grid design. The grid structure promotes
optimal resource utilization by allocating particular
functions and authorities to each agent depending on
their capabilities and the situation’s requirements with
the help of human operator. For example,in a res-
cue operation, the human operator will assign roles to
himself, such as analyzing blueprints and making ed-
ucated judgments, while robots are given tasks such
as navigation and data gathering.
The grid analysis facilitates allocation of tasks
based on the situation, allowing operations to be dy-
namically assigned in response to changing environ-
ments or objectives. This might ensure that resources
are allocated efficiently. For example, if the environ-
ment gets more dangerous or complicated, the human
operator may assign additional tasks to the robots in
order to reduce risk and increase efficiency. The grid
helps to manage this assignment operation by clearly
defining roles and competencies. In contrast, if com-
prehensive analysis or complicated decision-making
is necessary, the human operator may take on a more
active role to process information and recommend
best plan of action based on the agents’ competencies.
The grid also acts as a paradigm for developing
and deploying agent skills including programming
and training. Designers can analyze what could be the
best plan of action and decision required for good co-
operation by mapping out how the grid’s agents inter-
act. For example, the grid might emphasize the need
for robots to traverse barriers autonomously or con-
vey crucial information to human operators, motivat-
ing designers to include suitable capabilities. By out-
lining these interactions, the grid aids in the system-
atic development of cooperation strategies and skills.
By linking the dynamic adaptation of the orga-
nization, implementation, and evaluation processes
back to the grid framework, we underscore its im-
portance in enhancing cooperation. This integral ap-
proach not only optimizes the performance of H-
R teams but might also improve their adaptability
and effectiveness in dynamic and hazardous environ-
ments.
To summarise, the grid framework provides a sys-
tematic way to define agents’ role, resources, and ob-
jectives, for cooperation among the agents, shared
task, allocation and execution to complete a goal. Its
simplicity and versatility make it appropriate for a
variety of circumstances, opening the path for wider
adoption in crisis management and other cooperative
contexts. Designers may use the grid framework as
a tool to program and apply the cooperative model
based on unique situational needs, resulting in re-
silient and successful real-world solutions.
In the next section, we explore the application of
the grid analysis in a real-world situation and show
how the human operator and robots communicate and
coordinate their actions.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
252

4 APPLICATION
Based on the grid analysis between the human opera-
tor and robots, we apply the method explained in Sec-
tion 3 to a simple Search and Rescue operation. We
will use examples of cells in each quadrant of the grid
to illustrate the use of the grid analysis, highlighting
benefits, difficulties, and remaining gaps. The section
concludes with the need for an intermediary agent.
Consider a situation where the goal is to locate
and rescue a vital object trapped within a collapsed
structure. The grid arranges the roles and interactions
of each agent as follows:
4.1 Human Operator (HO)
The human operator has authority for analyzing
blueprints or visualizing the surroundings to uncover
prospective areas of interest, assessing information
provided by the robots to make educated decisions,
and using situational analysis to direct the robots’
movements and behaviors. The human operator’s re-
sources and objectives include collecting data on the
environment (Information Gathering - IG), interpret-
ing data from the robot’s sensors to evaluate the situa-
tion (Information Analysis - IA), determining the best
course of action (Decision Seclection - DS), and send-
ing orders to the robots to perform search and rescue
tasks such as removing debris or accessing difficult
areas (Action Implementation - AI).
4.2 Robots (R1, R2)
The robots are responsible for navigating through the
environment to locate the necessary object, using sen-
sors to detect the presence of an object and structural
irregularities, and reporting findings to the human op-
erator and following their directions. The robots’ re-
sources and objectives include acquiring data on the
building’s layout, structural stability, and potential
hazards (Information Gathering - IG), analyzing sen-
sor data to identify areas with the highest likelihood of
locating the vital object (Information Analysis - IA),
making decision on the best course of action based
on gathered information (Decision Selection - DS),
and performing tasks such as moving debris, entering
restricted areas, and sending real-time updates to the
human operator (Action Implementation - AI).
4.3 Dynamic Grid Use: Example
The dynamic use of the grid (as mentioned in Sec-
tion 3.3) not only facilitates the identification of agent
competencies but also assists in resource manage-
ment, task allocation according to the situation, and
system implementation to design the abilities of the
agents can be illustrated through various situations:
Situation 1: Initial Assessment. In the initial assess-
ment phase, the human operator uses IG and IA to
analyze initial data and directs robots to high-priority
areas (top left quadrant - KHO). Robots gather de-
tailed structural data but await further instructions be-
fore proceeding as seen in the top left quadrant KHO.
Situation 2: Encountering an Obstacle. When
robots encounter debris, the human operator assesses
the situation and decides to direct the robots to re-
move it (top right and bottom right quadrant). Both
robots and the human operator pause to reassess the
organization of cooperation, possibly seeking addi-
tional data (bottom right quadrant - KHC).
Situation 3: Locating the Object. As robots iden-
tify potential locations of the trapped object, the hu-
man operator uses IA to interpret sensor data and con-
firm the findings (top left and top right quadrant). The
robots then proceed to the identified locations to begin
the rescue operation (top left quadrant), while contin-
uously providing real-time updates to the human op-
erator(bottom left quadrant).
Situation 4: Structural Instability. If the robots
discover any physical unpredictability in the environ-
ment, the human operator must swiftly analyze the
dangers and determine whether to proceed, change
the robots’ direction, or evacuate the area (top left,
right left and bottom right quadrant). The human op-
erator may request further data or relevant informa-
tion to better grasp the consequences (top right and
bottom right quadrant).
4.4 Addressing Gaps
To address the gaps as discussed in background sec-
tion 2, the cooperation model should leverage the cog-
nitive strengths of human operators and the advanced
data processing capabilities of robots. By dynami-
cally updating the grid analysis, the system can help
at ensuring that human operators can make swift de-
cisions in fast-changing situations, thereby compen-
sating for the autonomous robots’ slower and some-
times the decision-making processes bad. The human
operators excel at interpreting complex sensor data,
providing critical insights that robots alone may miss.
Effective communication channels within the grid can
facilitate seamless data exchange between humans
and robots, ensuring robust cooperation and timely re-
sponses to dynamic rescue scenarios. However, gaps
remain in efficiently integrating data processing and
communication within the grid framework. Real-time
Applying a Systematic Approach to Design Human-Robot Cooperation in Dynamic Environments
253

data interpretation and synchronization are crucial for
improving the cooperation model.
4.5 Benefits and Difficulties
Benefits. A key benefit of the proposed model is
its capacity to support organized interactions between
human and robot agents’, which closely resemble the
designer’s planned cooperation designs. This is ac-
complished by a systematic analysis of the grid. This
organized procedure enables seamless interaction and
task execution resulting in simplified task comple-
tion. Real-time data analysis and communication en-
able informed decision-making, allowing for swift
adaptation to changing situations. Additionally, the
grid framework facilitates resource allocation by dy-
namically assigning tasks based on the capabilities of
each agent, maximizing the utilization of available re-
sources.
Difficulties. While the proposed method offers sig-
nificant benefits, there are also challenges associ-
ated with its usage. Real-time data exchange be-
tween human operators and robots, while crucial
for collaboration, can be hindered by communica-
tion delays, which impact the scenario’s speed and
the robot’s abilities. Highly dynamic situations with
fast-moving robots may necessitate immediate action
without waiting for human input, especially when
encountering potentially dangerous unknowns. This
highlights the need for a step back preventative action,
where the robot takes a pre-programmed, safe pause
to allow for human analysis. Additionally, sensor data
from robots may contain inaccuracies or disturbances,
affecting decision-making. Integrating advanced data
processing systems with existing human-robot inter-
action frameworks can be complex, requiring careful
planning and implementation. Addressing these chal-
lenges will be crucial for the implementation of the
cooperation.
4.6 Need for an Intermediary Agent
The grid analysis between the Human operator and
robots highlights the critical need for an intermedi-
ary agent to bridge gaps in coordination, lack of swift
human decisions, communication weakness and com-
plex sensor data (refer to Section 2) and enhance over-
all efficiency. In this context, the Intelligent Assis-
tance System (IAS) serves as the ideal intermediary
agent. The IAS can process information from both
human operators and robots, creating an integrated
action plan that optimizes the use of available re-
sources.
The IAS empowers rapid interpretation of com-
plex sensor data. By leveraging advanced algorithms
and machine learning, the IAS can swiftly analyze
vast amounts of data, identify patterns, and extract
actionable insights. This comprehensive understand-
ing, in contrast to a robot’s limited local view, allows
the IAS to maintain a crucial overview of the situa-
tion. This capability is crucial for making swift and
informed decision in dynamic S&R scenarios. The
IAS can also facilitate robust communication chan-
nels by acting as a central hub for data exchange, en-
suring that critical information is seamlessly shared
between human operators and robots. For example, it
can synchronize real-time updates from robots and re-
lay important information to the human operator, en-
suring that both agents are informed and can coordi-
nate their actions as needed.
Additionally, the IAS can dynamically adjust
strategies in response to real-time changes in the en-
vironment. By continuously monitoring the situation
and analyzing incoming data, it can recommend ac-
tion plan adjustments to ensure efficient and effective
operations as conditions evolve. The inclusion of an
IAS as an intermediary agent addresses research gaps
by leveraging advanced data processing and commu-
nication capabilities, thereby enhancing coordination
and efficiency in rescue operations and highlighting
the importance of integrating such agents for success-
ful human-robot cooperation.
5 CONCLUSION
The integration of human operators, robots, and an in-
termediate agent within a grid-based framework can
enhance cooperation in complex scenarios such as
search and rescue operations. By defining roles and
interactions, the grid framework facilitates a struc-
tured approach to identifying competencies, manag-
ing resources, and dynamically allocating tasks based
on the situations. Human operators use their an-
alytical skills to guide decisions, while robots au-
tonomously navigate and collect data with advanced
sensors. The intermediate agent, though still under
development, is crucial for coordinating actions and
processing information, optimizing mission perfor-
mance and safety. Further practical implementation,
such as a proof-of-concept experiment, is required
to show the framework’s effectiveness, dependability,
and workload management. The intermediate agent’s
ability to implement adaptive algorithms and real-
time monitoring can have the potential to reduce the
cognitive workload on human operators.
In conclusion, the grid-based analysis offers a
structured approach for cooperative tasks in disaster
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
254

management and other domains requiring coordinated
multi-agent systems. The clarity, organization, and
adaptability of the grid structure promote efficient co-
operation in diverse environments. Future research
should focus on refining the intermediate agent and
exploring new dimensions of the human-robot inter-
action to meet emerging challenges.
ACKNOWLEDGEMENTS
This research work is supported by the CNRS and
CROSSING: the French-Australian Laboratory for
Humans/Autonomous Agents Teaming. The authors
express also their sincere gratitude to Prof. Paulo Ed-
uardo Santos for his participation in this project.
REFERENCES
Alirezazadeh, S. and Alexandre, L. A. (2022). Dynamic
task scheduling for human-robot collaboration. IEEE
Robotics and Automation Letters, 7(4):8699–8704.
Aronson, R. M., Santini, T., K
¨
ubler, T. C., Kasneci, E.,
Srinivasa, S., and Admoni, H. (2018). Eye-hand be-
havior in human-robot shared manipulation. In Proc.
Int. Conf. on Human-Robot Interaction, pages 4–13.
Bravo-Arrabal, J., Toscano-Moreno, M., Fernandez-
Lozano, J., Mandow, A., Gomez-Ruiz, J. A., and
Garc
´
ıa-Cerezo, A. (2021). The internet of cooperative
agents architecture (x-ioca) for robots, hybrid sensor
networks, and mec centers in complex environments:
A search and rescue case study. Sensors, 21(23):7843.
Chella, A., Lanza, F., Pipitone, A., and Seidita, V.
(2018). Knowledge acquisition through introspection
in human-robot cooperation. Biologically inspired
cognitive architectures, 25:1–7.
Darvish, K., Simetti, E., Mastrogiovanni, F., and Casalino,
G. (2020). A hierarchical architecture for human–
robot cooperation processes. IEEE Transactions on
Robotics, 37(2):567–586.
Filip, F. G. (2022). Collaborative decision-making: con-
cepts and supporting information and communication
technology tools and systems. International Journal
of Computers Communications & Control, 17(2).
Goodrich, M. A., Schultz, A. C., et al. (2008). Human–
robot interaction: a survey. Foundations and Trends
in Human–Computer Interaction, 1(3):203–275.
Grislin-Le Strugeon, E., de Oliveira, K. M., Thilliez, M.,
and Petit, D. (2022). A systematic mapping study on
agent mining. J. of Exp. & Theor. AI, 34(2):189–214.
Hoc, J.-M. (2001). Towards a cognitive approach to human–
machine cooperation in dynamic situations. Int. J. of
human-computer studies, 54(4):509–540.
Jiang, S. and Arkin, R. C. (2015). Mixed-initiative human-
robot interaction: Definition, taxonomy, and survey.
In 2015 IEEE Int. Conf. on SMC, pages 954–961.
Li, S., Zheng, P., Liu, S., Wang, Z., Wang, X. V., Zheng,
L., and Wang, L. (2023). Proactive human–robot col-
laboration: Mutual-cognitive, predictable, and self-
organising perspectives. Robotics and Computer-
Integrated Manufacturing, 81:102510.
Mizrahi, D., Zuckerman, I., and Laufer, I. (2020). Using
a stochastic agent model to optimize performance in
divergent interest tacit coordination games. Sensors,
20(24):7026.
Mostaani, A., Vu, T. X., Sharma, S. K., Nguyen, V.-D.,
Liao, Q., and Chatzinotas, S. (2022). Task-oriented
communication design in cyber-physical systems: A
survey on theory and applications. IEEE Access,
10:133842–133868.
Murali, P. K., Darvish, K., and Mastrogiovanni, F. (2020).
Deployment and evaluation of a flexible human–robot
collaboration model based on and/or graphs in a man-
ufacturing environment. Intelligent Service Robotics,
13(4):439–457.
Nourbakhsh, I. R., Sycara, K., Koes, M., Yong, M., Lewis,
M., and Burion, S. (2005). Human-robot teaming
for search and rescue. IEEE Pervasive Computing,
4(1):72–79.
O’Neill, T., McNeese, N., Barron, A., and Schelble, B.
(2022). Human–autonomy teaming: A review and
analysis of the empirical literature. Human factors,
64(5):904–938.
Pacaux-Lemoine, M.-P. (2020). HUMAN-MACHINE CO-
OPERATION: Adaptability of shared functions be-
tween Humans and Machines-Design and evaluation
aspects. PhD thesis, Universit
´
e Polytechnique Hauts-
de-France.
Pacaux-Lemoine, M.-P., Habib, L., and Carlson, T. (2023).
Levels of Cooperation in Human–Machine Systems:
A Human–BCI–Robot Example. In Handbook of
Human-Machine Systems. Wiley.
Pacaux-Lemoine, M.-P. and Vanderhaegen, F. (2013). To-
wards levels of cooperation. In 2013 IEEE Int. Conf.
on SMC, pages 291–296.
Paliga, M. (2022). Human–cobot interaction fluency and
cobot operators’ job performance. the mediating role
of work engagement: A survey. Robotics and Au-
tonomous Systems, 155:104191.
Tula, S., Pacaux-Lemoine, M.-P., Grislin-Le Strugeon,
E., Santos, P. E., Ma-Wyatt, A., and Diguet, J.-P.
(2024). Agent’s cooperation levels to enhance human-
robot teaming. In Workshop ARMS (Autonomous
Robots and Multirobot Systems), 23rd Inter. Conf.
on Autonomous Agents and Multiagent Systems (AA-
MAS’24), page 9, Auckland, New Zealand.
Vera-Ortega, P., V
´
azquez-Mart
´
ın, R., Fern
´
andez-Lozano,
J. J., Garc
´
ıa-Cerezo, A., and Mandow, A. (2022). En-
abling remote responder bio-signal monitoring in a
cooperative human–robot architecture for search and
rescue. Sensors, 23(1):49.
Wijayathunga, L., Rassau, A., and Chai, D. (2023). Chal-
lenges and solutions for autonomous ground robot
scene understanding and navigation in unstructured
outdoor environments: A review. Applied Sciences,
13(17):9877.
Applying a Systematic Approach to Design Human-Robot Cooperation in Dynamic Environments
255
