
A Vector Autoregression-Based Algorithm for Dynamic Many-Objective
Optimization Problems
Kalthoum Karkazan
1
, Haluk Rahmi Topcuoglu
1
and Shaaban Sahmoud
2
1
Faculty of Engineering, Computer Engineering Department, Marmara University, Istanbul, Turkey
2
Faculty of Engineering, Computer Engineering Department, Fatih Sultan Mehmet Vakif University, Istanbul, Turkey
Keywords:
Dynamic Many-Objective Optimization, Many-Objective Evolutionary Algorithms, Change Detection,
Prediction-Based Optimization.
Abstract:
Dynamic Many-Objective Optimization Problems (DMaOPs) represent a significant challenge due to their
inherent dynamism and the presence of a large number of objectives. In addressing this complexity, this paper
proposes a new prediction-based strategy tailored to managing detected changes in such problems, which is
one of the first attempts to address the DMaOPs. Our proposed algorithm constructs a Vector Autoregressive
(VAR) model within a dimensionality-reduced space. This model effectively captures the mutual relationships
among decision variables and enables an accurate prediction of the initial positions for the evolving solutions
in dynamic environments. To accelerate the convergence process, the algorithm demonstrates adaptability
by responding multiple times to the same detected change. In our empirical study, the performance of the
proposed algorithm is evaluated using four selected test problems from various benchmarks. Our proposed
approach shows competitive results compared to the other algorithms in most test instances.
1 INTRODUCTION
Many-objective optimization problems (MaOPs) are
defined as optimization problems that have four or
more conflicting objectives to be optimized simulta-
neously (Farina and Amato, 2002). Many real-world
problems from diverse domains belong to this type of
optimization problem where they sometimes involve
up to 15 objectives or more (Coello and Lamont,
2004). One illustrative example is explored in (Zhu
et al., 2019), where the authors argue that the evolv-
ing societal landscape necessitates increasing demand
for high-quality power. Recognizing the limitations
of single-objective economic optimization, there is
a persistent need for a shift toward many-objective
power flow optimization. These objectives primar-
ily encompass economic, environmental, reliability,
and stability factors, aiming for comprehensive mod-
ern power system management. Another instance is
presented in (Li et al., 2008), where the authors in-
vestigate the power generation loading optimization
problem with four objectives: minimize total cost,
minimize fuel consumption, minimize emissions, and
maximize output.
The primary distinction between a dynamic opti-
mization problem (DOP) and a stationary optimiza-
tion problem lies in the presence of dynamism within
the environment (Jin and Branke, 2005). Dynamism
can manifest in various forms, encompassing changes
in one or more objective functions, modifications
in constraints, and/or shifts in problem parameters
across time (Jin and Branke, 2005). Solutions deemed
optimal or the best before a change may not retain
their optimality or superiority in the new environ-
ment. Consequently, the main objective of a dynamic
optimization problem is to track the global optima
closely. This dynamic nature presents additional com-
plexities when dealing with such problems.
While most of the current research on MaOPs
assumes that the environment is stationary, in real-
world scenarios, many factors can affect the environ-
ment or the optimization problem objectives and vari-
ables (Gupta and Nanda, 2021). To the best of our
knowledge, this paper is one of the first to try to han-
dle this type of optimization problem called Dynamic
Many-Objective Optimization Problems (DMaOPs).
The complexity of dynamic many-objective op-
timization problems requires advanced optimiza-
tion algorithms and strategies to explore the high-
dimensional solution space efficiently and quickly
adapt to new environmental changes. Therefore, the
algorithms designed for static many-objective prob-
Karkazan, K., Topcuoglu, H. and Sahmoud, S.
A Vector Autoregression-Based Algorithm for Dynamic Many-Objective Optimization Problems.
DOI: 10.5220/0013009200003837
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 279-287
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
279

lems are not adequate for handling the changing na-
ture of DMaOPs. As a result, these problems need
the development of adaptive algorithms that can con-
sistently update the estimated Pareto-optimal front
(POF) to align it as quickly, accurately, and uniformly
diversified as possible to the actual POF.
In this paper, we present the design and develop-
ment of a dynamic many-objective evolutionary al-
gorithm (DMaOEA) that effectively solves dynamic
many-objective optimization problems (DMaOPs).
Our algorithm adapts to changes in the problem en-
vironment and efficiently handles the trade-offs be-
tween multiple conflicting objectives over time to en-
sure the attainment of an accurately estimated Pareto-
optimal front (POF). The proposed DMaOEA consis-
tently tracks the shifting Pareto-optimal fronts (POFs)
and produces a widely spread set of solutions across
it. The algorithm’s effectiveness is assessed using dif-
ferent metrics that measure the estimated POFs’ con-
vergence and diversity.
The rest of this paper is organized as follows: Sec-
tion 2 defines the dynamic many-objective optimiza-
tion problem and summarizes the related work. Sec-
tion 3 describes and explains the proposed algorithm
in detail. Experimental settings and results are given
in Section 4. Section 5 concludes the paper and pro-
poses some future research directions.
2 DYNAMIC MANY-OBJECTIVE
OPTIMIZATION
In this section, we focus on many-objective opti-
mization and dynamic multi-objective optimization
because they are considered the two origins from
which Dynamic Many-Objective Optimization Prob-
lems (DMaOPs) are derived. A DMaOP is an opti-
mization problem characterized by two merged key
attributes: the existence of dynamism within the prob-
lem environment and the involvement of many con-
flicting objectives.
As in dynamic multi-objective optimization prob-
lems, the dynamism of DMaOP is exemplified by
variations over time in one or more aspects of the op-
timization problem, such as alterations in objective
functions, constraints, or problem parameters. Con-
currently, the optimization problem is more complex
by the inclusion of a significant number of conflict-
ing objectives, typically exceeding four. As a result of
this large number of objectives, the Pareto-dominance
becomes ineffective in differentiating between indi-
viduals.
In MaOPs, obtaining a well-distributed set of non-
dominated solutions on the POF becomes increas-
ingly challenging as the number of objectives rises.
Moreover, the visualization for this type of prob-
lem is complicated as the traditional graphical meth-
ods struggle to represent high-dimensional Pareto
fronts (Deb and Jain, 2014). In addition, evaluat-
ing many-objective optimization problems is compu-
tationally expensive since the performance metrics re-
quire larger computational effort as the number of ob-
jectives increases (C.M. Fonseca and Lopez-Ibanez,
2006).
Although the performance of the existing MOEAs
has dropped dramatically when handling MaOPs due
to the difficulties mentioned above, they can be used
as a baseline to develop effective MaOEAs. Many
successful MOEAs have been adapted in literature
and have proven their effectiveness in solving vari-
ous real-world MaOPs such as the NSGA-III (Deb
and Jain, 2014) and the MOEA/D (Zhang and Li,
2007). The main idea in these two algorithms is to
divide the search space into predefined multiple tar-
geted searches. As a result, an individual will com-
pete with only the individuals that are associated with
its search target rather than compete with all the other
individuals in the population. Consequently, optimal
points corresponding to each targeted search task are
identified, easing the difficulty associated with han-
dling a large non-dominated set as well as maintain-
ing a good level of diversity in the population. Un-
fortunately, most MaOEAs are not directly applicable
to DMaOPs because of the existence of various forms
of dynamism which dramatically degrade the perfor-
mance.
In the literature, there are many approaches have
been proposed to solve DMOPs including diversity-
based (Deb et al., 2007), problem type-based (Sah-
moud and Topcuoglu, 2018), memory-based (Sah-
moud and Topcuoglu, 2020), and prediction-
based (Azzouz et al., 2017; Karkazan et al., 2023).
On the other hand, there are many attempts to
benefit from Machine Learning models to improve
the prediction results such as using Support Vector
Machine (SVM) (Weizhen et al., 2019) and trans-
fer learning (Jiang et al., 2017). In a recent re-
search work, the authors of (Jiang et al., 2023) in-
troduced an algorithm called Vector Autoregressive
Evolution (VARE), which combines Vector Autore-
gression (VAR) and environment-aware hypermuta-
tion (EAH) techniques to track the changing POFs in
DMOPs. The VARE constructs a VAR model that
captures the mutual relationships between decision
variables, enabling accurate prediction of the loca-
tions of new solutions in the evolving environment.
Additionally, the VARE incorporates environment-
aware hypermutation techniques to enhance popu-
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
280

lation diversity and improve the algorithm’s perfor-
mance in cases where the prediction approach is un-
suitable.
3 A NEW PREDICTION-BASED
ALGORITHM
Our proposed algorithm utilizes the NSGA-III algo-
rithm (Deb and Jain, 2014) as a baseline, enhancing
its ability to deal with environmental changes. It also
applies the Principle Component Analysis (PCA) for
constructing a Vector Auto Regression (VAR) model.
In the following subsections, the VAR and the PCA
are explained briefly, which is followed by the steps
of our algorithm.
3.1 Vector Auto Regression
Multivariate time series is a special case of time se-
ries where multiple variables are recorded over time,
creating a sequence of data points. These variables
can be interrelated and impact each other’s values. In
other words, each variable is influenced not only by its
past values but also by other variables. This interde-
pendency is utilized to predict future values. Analyz-
ing those time series and creating models from them
opens doors to comprehending and predicting trends
and patterns effectively (Jonathan D. Cryer, 2008).
Vector Auto Regression (VAR) is a widely uti-
lized approach for forecasting multivariate time series
data. This technique has consistently demonstrated
its effectiveness across various fields by capturing in-
tricate relationships among multiple time series vari-
ables and accurately predicting future values. Some
of its applications include but are not limited to eco-
nomic forecasting, financial market analysis, climate
and environmental studies, and social sciences. In a
VAR model, each variable is modeled as a linear com-
bination of its past values as well as the past values of
other variables in the system (Jin and Chen, 2013).
According to (S. Huband and While, 2006), the
decision variables in a MOP/MaOP are often cor-
related and interrelated. This characteristic makes
VAR models a highly suitable technique to address
these problems. However, there is a critical consid-
eration before applying VAR to MaOPs. Although
VAR models deliver accurate prediction results, their
performance can be significantly impacted when deal-
ing with high-dimensional problems, as in the case
of MaOP decision variables. To mitigate this effect,
a dimension reduction technique is employed as ex-
plained in the following section.
3.2 Principal Component Analysis
Principal Component Analysis (PCA) is a statisti-
cal method used for dimensionality reduction, out-
liers detection, data analysis, and graphical clustering
or classification (Geladi and Linderholm, 2020). It
identifies the most significant patterns in a dataset by
transforming the original variables into a new set of
uncorrelated variables called principal components.
These components capture the maximum variance in
the data, allowing for a reduction in dimensional-
ity while retaining essential information. Principal
Component Analysis (PCA) is a commonly employed
technique in multivariate data analysis (Geladi and
Linderholm, 2020).
Figure 1 provides a simple example illustrating the
process of dimensionality reduction using PCA. The
first sub-figure on the left shows the position of the
data points in the original space. PCA identifies the
best-fitting lower-dimensional surface in which the
projection error is minimized, as demonstrated in the
middle sub-figure. The final sub-figure represents the
points in the new surface after the reduction process.
Figure 1: Converting 2-D space to a 1-D space using PCA.
Let POP
ml
= x
1
, x
2
, ..., x
n
(where each x
i
is a D×1
vector) represent all archived solutions up to the cur-
rent environment. We aim to map any data point
x
i
∈ pop
ml
from the D − Dimentions space to a much
lower k − Dimentions (k ≪ n) space, namely,
x
i
= (x
1
i
, x
2
i
, ..., x
D
i
) ⇒ y
i
= (y
1
i
, y
2
i
, ..., y
k
i
) (1)
One advantage of the PCA algorithm is the abil-
ity to reconstruct the points in the original space (i.e.
from y
i
back to x
i
), as demonstrated in Figure 2. This
feature is essential in the context of our algorithm and
makes PCA a good choice for dimensionality reduc-
tion.
3.3 Non-Dominated Sorting Genetic
Algorithm III (NSGA-III)
The NSGA-III (Deb and Jain, 2014) algorithm is
an extension of the popular NSGA-II algorithm to
adapt for many-objective optimization problems. The
fundamental structure remains same to the original
NSGA-II algorithm, with substantial modifications in
A Vector Autoregression-Based Algorithm for Dynamic Many-Objective Optimization Problems
281

Figure 2: Reconstruction of 2-D space using PCA.
its selection mechanism which is designed to over-
come the main difficulty mentioned in Section 2. This
new approach also helps in maintaining a diverse set
of solutions. The main idea behind the modifications
in NSGA-III is to initialize the algorithm with refer-
ence points (RPs) at the start of the run. The positions
of individuals concerning these RPs serve as the foun-
dation for the selection process, diverging from the
approach of using crowding distance as in NSGA-II.
3.4 Change Response Strategy
To effectively characterize changes in dynamic multi-
objective optimization problems, it is vital to both
detect the changes and evaluate their severity. The
severity of a change typically refers to the magni-
tude or extent of modifications made to the prob-
lem’s parameters, constraints, or objective function.
When a dynamic multi-objective evolutionary algo-
rithm incorporates a precise mechanism for detecting
the severity of changes, it becomes beneficial to en-
hance the algorithm with dynamic and efficient mech-
anisms to appropriately respond to the detected sever-
ity of change (Sahmoud and Topcuoglu, 2019). In this
paper, we will adapt the same strategy for dynamic
many-objective optimization problems.
When a change is detected, the severity of change
is calculated according to Equation 2. It is important
to highlight that employing this equation for calcu-
lating the severity of change resolves issues encoun-
tered when determining the overall severity of change
(SC) by choosing the maximum value among the cal-
culated severities for each objective function indepen-
dently (Sahmoud and Topcuoglu, 2019).
SC
j
=
S
∑
i=1
F
i, j
(t) − F
i, j
(t − 1)
F
i, j
(t) + s
SC = λ × max(SC
1
, SC
2
, ..., SC
M
)
(2)
In this equation, SC
j
denotes the severity of change
for the objective function j, and S represents the num-
ber of selected indicators for detecting environmen-
tal changes. F
i, j
(t) and F
i, j
(t − 1) signify the val-
ues of objective function j for sensor i in the current
and previous generations, respectively. The term s
is a small constant utilized to prevent undefined re-
sults when F
i, j
(t) is zero. Additionally, λ is employed
to adapt the equation for varying numbers of objec-
tive functions. In this study, it is set to M − 1 as
recommended by the reference study (Sahmoud and
Topcuoglu, 2019), where M represents the objectives
of the given problem.
If the severity of change is greater than or equal
to the average value, ε% of the population is replaced
by randomly generated individuals. Otherwise, the
algorithm will replace ε% of the population with mu-
tated solutions. It is noteworthy that this technique
is employed because a significant change suggests
that the new POF’s location is likely far from the old
POF’s position. Hence, to explore new locations in
the search space, the re-initialization procedure is im-
plemented. Conversely, a small severity of change
value indicates a slight shift in the new POF’s loca-
tion, and the mutation operation is sufficient to track
it. In our empirical study, ε% is equal to 20% of the
population.
In the predetermined number of generations fol-
lowing the detected change, the algorithm systemati-
cally archives the decision variable values of the clos-
est individual associated with each reference point,
if there are any, for subsequent usage. These val-
ues serve as training samples when constructing the
vector autoregression model. In this study, we collect
samples for five generations after each change. After
that, the collected training data are used to construct
and train a vector autoregression model. The process
for doing that is explained in detail in the following
subsection. Algorithm 1 explains how the proposed
algorithm reacts to a detected change.
3.5 Prediction Strategies for Individuals
After collecting a sufficient number of training sam-
ples, our algorithm utilizes these samples to construct
a vector autoregression model. In the preparatory
phase, the algorithm employs PCA for dimensional-
ity reduction, constructing a VAR model within the
reduced space of time series solutions. Subsequently,
this VAR model is utilized to predict new individu-
als, and these newly predicted individuals are recon-
structed with PCA to revert to the original number
of dimensions before being added to the population.
To maintain a high level of diversity in the popula-
tion, a fixed percentage of the population is substi-
tuted with randomly generated individuals. In this
empirical study, a 5% of the population is replaced
each time the algorithm responds.
The visualization in Figure 3 illustrates the con-
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
282
if ChangeDetected then
Calculate the SeverityO f Change
if SeverityO fChange >= AvgSeverityO fChange
then
Reinitialize ε% of the population
else
Mutate ε% of the population
end if
Update AvgSeverityO fChange
count ← 0
end if
if count <= T S then
Store the closest individual of each reference
point in the archive
else
if T S mod λ ≡ 0 then
Reinitialize α% of the population
Construct VAR and employ it to forecast new
population members
end if
end if
count ← count + 1
Algorithm 1: The Change Reaction Strategy.
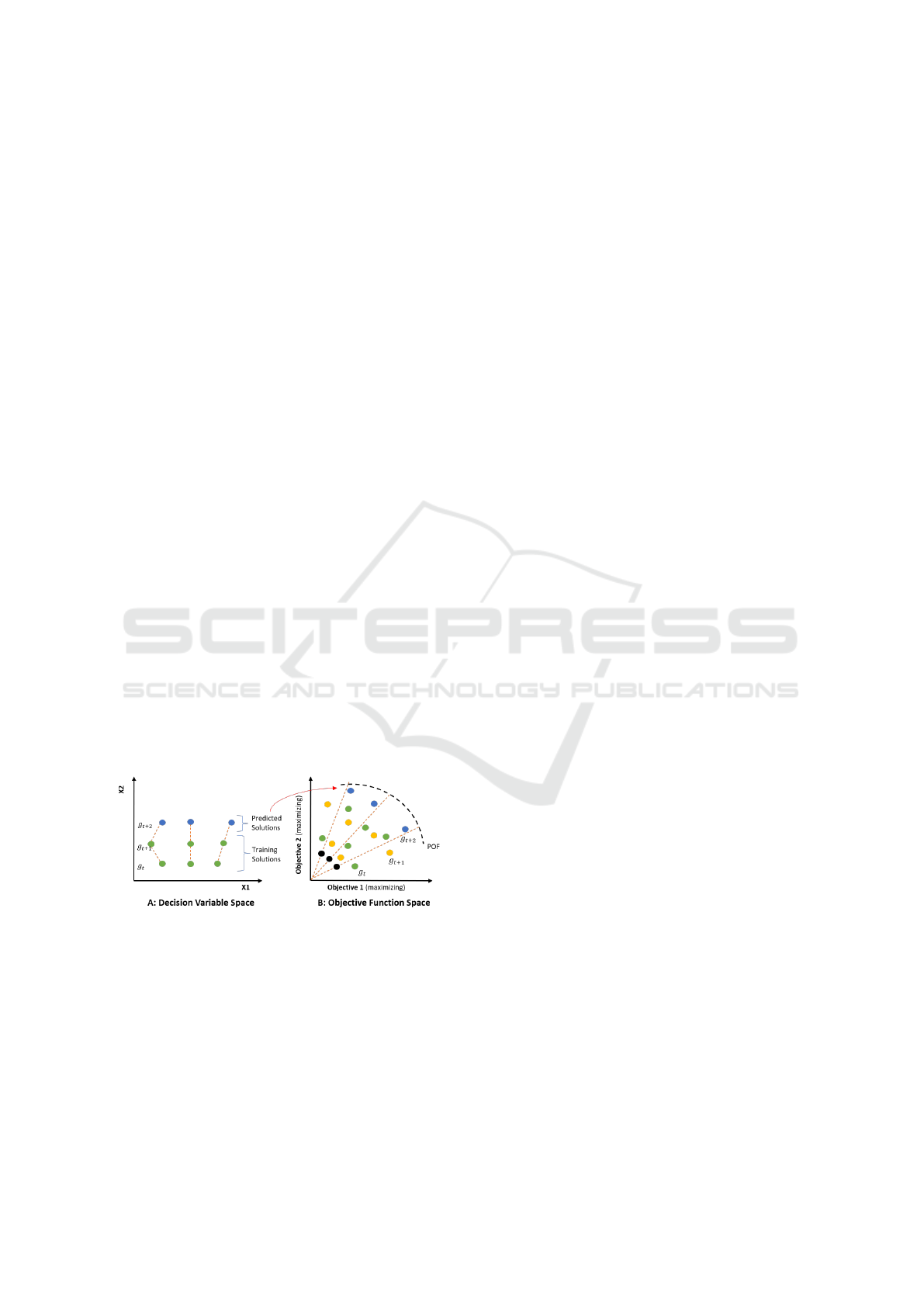
cept. The black points represent the reference points
generated by the NSGA-III algorithm at the begin-
ning of the run. Within the objective function space,
the green points denote the selected individuals to be
stored in the archive and utilized as training samples.
When a point is chosen for archiving, values of its
decision variables are stored and all of the archived
information is employed to construct a model that
predicts new individuals, which is indicated by the
green points in the decision variable space in Figure3.
The resulting individuals predicted by the VAR model
are represented as blue points in the decision variable
space.
Figure 3: The proposed prediction strategy for individuals
in the new detecting environments.
3.6 Considering Multiple Reactions
Finally, periodic reactions are applied after the new
environment has been running for a specific number
of generations. In our empirical study, the algorithm
reacts periodically after every five generations. This
step helps accelerate the convergence process and pre-
vents the solutions from sticking to the local opti-
mum. This step is very important for the performance
of the algorithm. After each generation more infor-
mation is collected about the new environment and
the prediction process will be more accurate, which
can help catch up any error in the previous prediction
process.
Figure 4 summarizes the proposed algorithm in
a flowchart. As depicted in the flowchart, the al-
gorithm initiates by randomly initializing individuals
for the first generation, configuring the algorithm’s
parameters, and generating reference points. Sub-
sequently, the environment is sensed at the incep-
tion of each generation. If no change is detected,
the static MOEA, specifically NSGA-III, is activated,
and the population evolves through its genetic oper-
ators. Conversely, upon detecting a change, the al-
gorithm computes the severity of the change and up-
dates a portion of the population accordingly. Si-
multaneously, it begins collecting training samples by
storing the closest individual for each reference point
(RP) in the archive. When the number of genera-
tions used for collecting training samples reaches a
specific threshold called T S, the algorithm employs
the dimensional reduction technique, namely Princi-
ple Component Analysis (PCA) on the training sam-
ples. The output of PCA is then used to construct a
VAR model, which is used to predict the new individ-
uals that are injected into the population.
4 EXPERIMENTAL DESIGN
This section outlines the experimental design, encom-
passing information about the test problems, perfor-
mance evaluation metrics, and the algorithms in our
comparative study.
4.1 Test Problems
The performance of algorithms is evaluated using
a total of four test instances. Two of these prob-
lems, FDA4 and FDA5, are from the FDA test prob-
lems (Farina et al., 2004), and the other two, SJY4
and SJY5, are from the SJY test problems (Jiang and
Yang, 2014). These specific test instances were se-
lected because they are among the limited number of
scalable test instances available in the literature. Due
to their scalability, these instances can be tested with
more than 3-objective functions, making them suit-
able for evaluating Dynamic Many-Objective Prob-
lems (DMaOPs).
These test suites encompass all types of DMOPs,
based on the classification presented by Farina et
al. (Farina et al., 2004). Notably, these instances, fea-
A Vector Autoregression-Based Algorithm for Dynamic Many-Objective Optimization Problems
283
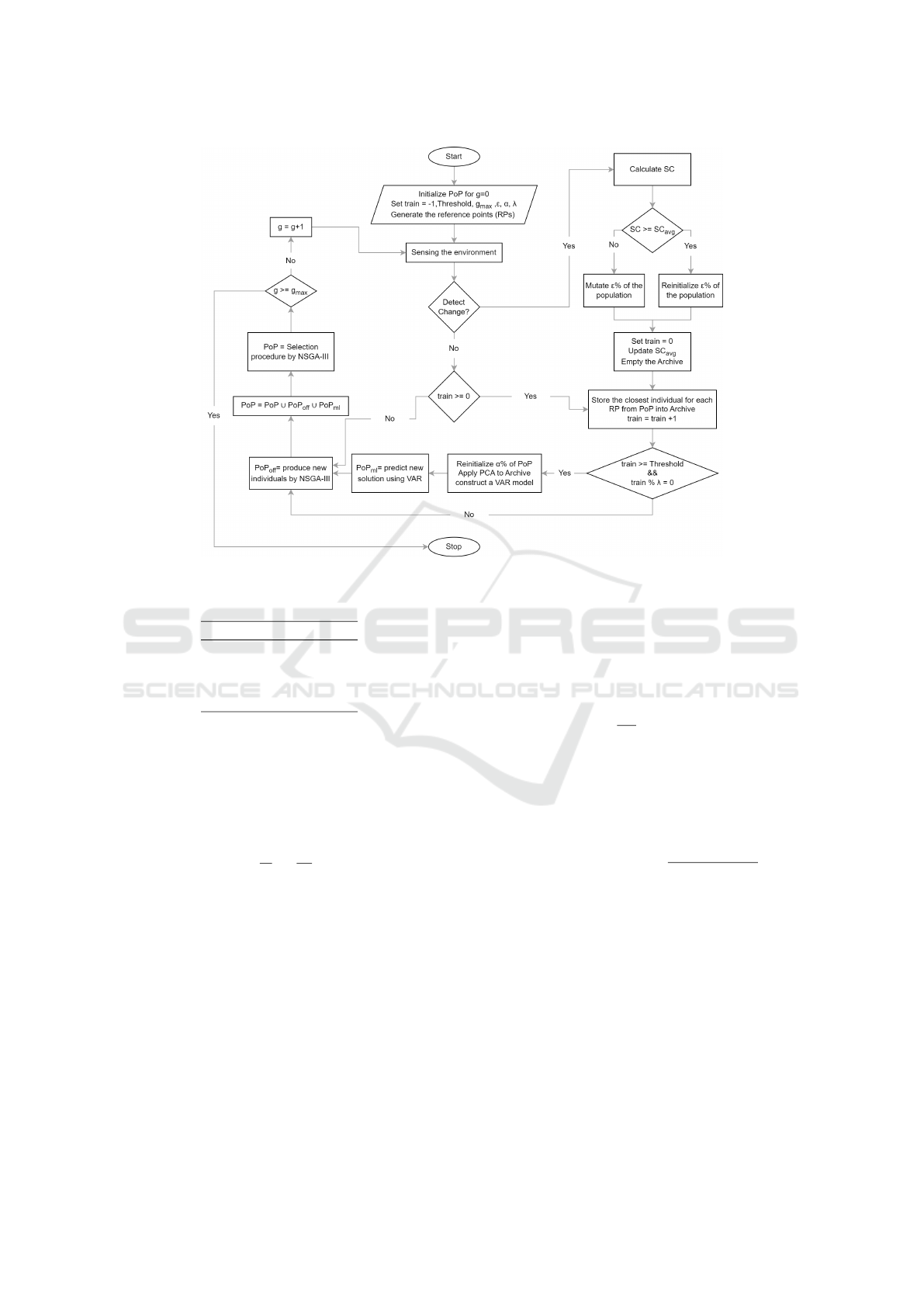
Figure 4: The flowchart of the proposed algorithm for DMaOPs.
Table 1: The used benchmarks types.
Problem Type
FDA4 Type 1
FDA5 Type 2
SJY4 Type 3
SJY5 Type 4
turing known Pareto-optimal fronts, are specifically
designed to assess the performance of algorithms de-
signed to react to the dynamic changes in many-
objective optimization problems.
The details of the selected test problems are sum-
marized in Table 1, where the time used in these tests
is defined as
t =
1
n
t
∗
τ
f r
(3)
where f r is the change frequency, τ is the generations
counter, and n
t
is the severity of change.
4.2 Performance Metrics
Within this section, the definitions of the utilized
metrics are introduced, clarifying their importance in
evaluating the outcomes of the developed algorithms.
Two of the extensively acknowledged performance
metrics are used and their overviews are presented be-
low.
• Mean Inverted Generational Distance (mIGD):
This metric is a modified form of the inverted gen-
erational distance (IGD) (Li and Zhang, 2009). In
this approach, the mean value of the IGD metric
across all generations is computed, as illustrated
below.
mIGD =
1
|T |
∑
t∈T
IGD(PF
t
, PF
∗
t
) (4)
The IGD metric (Coello and Cortes, 2005) is em-
ployed to assess the diversity and convergence of
algorithms designed for static multi-objective op-
timization problems.
IGD(PF
t
, PF
∗
t
) =
∑
v∈PF
t
d(v, PF
∗
t
)
|PF
t
|
(5)
In this context, PF
t
denotes the set represent-
ing uniformly distributed points in the true Pareto
front and PF
∗
t
is the set comprising the estimated
Pareto optimal front generated by the algorithm at
the t-th time step. The minimum Euclidean dis-
tance between a point v in PF
t
and the points in
PF
∗
t
is expressed as d(v, PF
∗
t
).
• Average Maximum Spread (aMS): This metric
quantifies the diversity of the estimated Pareto op-
timal front by assessing its dispersion across the
true Pareto optimal front. Originally designed for
application in steady-state multi-objective envi-
ronments, it is adjusted for dynamic environments
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
284

by computing the average of its values across
all generations, as demonstrated below (Goh and
Tan, 2009):
aMS =
v
u
u
t
1
M
∑
M
k=1
"
min
[
POF
k
,POF
∗
k
]
−max
h
POF
k
,POF
∗
k
i
POF
k
−POF
k
#
(6)
In this equation, POF
∗
k
denotes the minimum
value of the k-th objective in the estimated Pareto
optimal front. M denotes the count of fitness func-
tions, and POF
k
refers to the maximum value of
the k-th objective in the true Pareto optimal front.
4.3 Algorithms in the Empirical Study
Two DMaOEAs are used in the comparison study: the
dynamic version of the NSGA-III algorithm (NSGA-
III-Reinitialize), and the Dynamic non-dominated
sorting genetic algorithm III (DNSGA-III) (Gupta
and Nanda, 2021).
• NSGA-III-Reinitialize: This algorithm is adapted
for dynamic problems by introducing new indi-
viduals when a change in the environment is de-
tected. The newly introduced solutions are chosen
to be 20% of the population size and they are gen-
erated by random initialization.
• Dynamic Non-dominated Sorting Genetic Algo-
rithm III (DNSGA-III): The only reference al-
gorithm found in the literature proposed to han-
dle DMaOPs is the DNSGA-III, which is adapted
from the NSGA-III algorithm. To address the
dynamism in the problem, the authors suggested
using machine learning (ML) techniques to pre-
dict the initial location of individuals in future
environments (Gupta and Nanda, 2021). The
authors studied the effect of applying differ-
ent ML techniques for the prediction process.
Those techniques include support vector regres-
sion (SVR) with linear kernel and radial basis
function (RBF) kernel, polynomial interpolation,
and cubic spline-based prediction. According to
the authors, the algorithm delivers its best results
when the prediction is conducted using the sup-
port vector regression with radial basis function
(SVR-RBF) kernel ML technique. Consequently,
this technique was utilized during the simulation
of this algorithm in our empirical study.
4.4 Parameters Setting
Following are the values for some of the key parame-
ters as been set in the experiment:
• Number of Objectives (M): Three different
values have been chosen to effectively test the al-
gorithms’ ability to deal with MaOPs.
• Number of Reference Points (H): This
value has been calculated according to the num-
ber of objectives as suggested by the authors of
NSGA-III (Deb and Jain, 2014).
• Population size (N): This value is set for each
test case as the smallest multiple of four greater
than H (Deb and Jain, 2014).
• Number of Decision Variables (D): The
No. of decision variable is suggested in (Deb
and Jain, 2014) to be calculated by the following
equation:
D = M + k − 1 (7)
where M is the number of objectives, and k = 10
for the problems extended from DTLZ2, namely,
FDA4 and FDA5.
• Change Frequency: For each test instance, each
algorithm has been tested with three different val-
ues for change frequency τ
t
, those values are 10,
20, and 30.
• Number of Generations: At each run, the num-
ber of generations has been specified according
to the change frequency for that run. 10 gener-
ations have been given between each two consec-
utive changes to give the algorithms the chance to
converge to the real POF. This is represented by,
10 ∗ τ
t
• Number of Executions: Each algorithm was
executed 30 independent times on each test in-
stance.
4.5 Experimental Results
In this section, the effectiveness of our algorithm is
evaluated and compared with other DMaOEAs within
the context of our experimental framework. All of
the experiments ran on the same experimental plat-
form PlatEMO (Tian et al., 2017). This platform
is an evolutionary multi-objective optimization plat-
form developed in MATLAB for free use in research
and educational purposes. It supports diverse bench-
mark problems, performance metrics, and visualiza-
tion tools.
Table 2 shows the results of the mIGD metric. The
best results from each of the three algorithms are de-
noted in bold. As seen in Table 2, the proposed algo-
rithm outperforms the other algorithms in most of the
test instances (23 out of 36 cases). The mIGD metric
evaluates both convergence and diversity when mea-
suring an algorithm’s performance, so getting com-
petitive results in this metric means that the proposed
A Vector Autoregression-Based Algorithm for Dynamic Many-Objective Optimization Problems
285
Table 2: Mean inverted generational distance values of al-
gorithms.
Problem M tau Proposed NSGA-III DNSGA-
Algorithm -Reinitialize III
FDA4
4
10 1.28E-01 1.31E-01 1.34E-01
20 1.23E-01 1.21E-01 1.21E-01
30 1.10E-01 1.11E-01 1.12E-01
5
10 2.18E-01 2.13E-01 2.11E-01
20 1.91E-01 1.93E-01 1.92E-01
30 1.77E-01 1.77E-01 1.76E-01
6
10 2.76E-01 2.95E-01 2.91E-01
20 2.20E-01 2.26E-01 2.25E-01
30 2.04E-01 2.08E-01 2.06E-01
FDA5
4
10 2.61E-01 2.70E-01 2.74E-01
20 2.39E-01 2.43E-01 2.44E-01
30 2.23E-01 2.22E-01 2.26E-01
5
10 4.52E-01 4.48E-01 4.50E-01
20 3.95E-01 3.92E-01 3.92E-01
30 3.58E-01 3.57E-01 3.55E-01
6
10 6.20E-01 6.62E-01 6.47E-01
20 4.59E-01 4.79E-01 4.68E-01
30 4.18E-01 4.27E-01 4.22E-01
SJY4
4
10 1.12E-01 1.13E-01 1.12E-01
20 1.08E-01 1.08E-01 1.09E-01
30 1.08E-01 1.08E-01 1.08E-01
5
10 1.65E-01 1.63E-01 1.63E-01
20 1.59E-01 1.59E-01 1.59E-01
30 1.59E-01 1.59E-01 1.58E-01
6
10 1.78E-01 1.78E-01 1.78E-01
20 1.73E-01 1.73E-01 1.72E-01
30 1.72E-01 1.72E-01 1.72E-01
SJY5
4
10 9.48E-02 8.95E-02 9.56E-02
20 8.21E-02 8.20E-02 8.25E-02
30 8.17E-02 8.17E-02 8.24E-02
5
10 1.39E-01 1.42E-01 1.43E-01
20 1.26E-01 1.26E-01 1.26E-01
30 1.25E-01 1.25E-01 1.25E-01
6
10 1.50E-01 1.48E-01 1.52E-01
20 1.39E-01 1.39E-01 1.40E-01
30 1.38E-01 1.38E-01 1.38E-01
algorithm is able to converge successfully to the true
POF quickly and maintains the diversity, as well.
Table 3 shows the results of the aMS metric which
evaluates the diversity level of the obtained solutions.
Although the proposed algorithm obtains the best re-
sults, the other algorithms provide competitive re-
sults. When those results are compared, it can be ob-
served that there is no significant difference for most
of the test instances.
5 CONCLUSION AND FUTURE
WORK
The primary objective of this paper is to create an
algorithm capable of effectively tackling dynamic
many-objective optimization problems. This algo-
rithm adaptively responds to the change according to
the severity of the detected change by either mutat-
ing or re-initializing a portion of the population. It
then preserves the Pareto-optimal front (POF) for cer-
tain subsequent populations, utilizing them as training
samples to construct a VAR model. This VAR model
is then used to predict new individuals that are sup-
posed to be closer to the real POF. The algorithm re-
sponds multiple times for the same change to speed
up the convergence process. Our algorithm demon-
Table 3: Mean average maximum spread values of algo-
rithms.
Problem M tau Proposed NSGA-III DNSGA-
Algorithm -Reinitialize III
FDA4
4
10 1.00E+00 9.99E-01 9.99E-01
20 9.92E-01 9.93E-01 9.85E-01
30 9.99E-01 9.99E-01 9.99E-01
5
10 1.00E+00 1.00E+00 1.00E+00
20 9.94E-01 9.91E-01 9.94E-01
30 9.95E-01 9.96E-01 9.97E-01
6
10 1.00E+00 1.00E+00 1.00E+00
20 9.98E-01 9.98E-01 9.96E-01
30 9.98E-01 9.99E-01 9.98E-01
FDA5
4
10 9.98E-01 9.99E-01 9.99E-01
20 9.95E-01 9.93E-01 9.88E-01
30 9.97E-01 9.97E-01 9.96E-01
5
10 1.00E+00 1.00E+00 1.00E+00
20 9.91E-01 9.93E-01 9.90E-01
30 9.92E-01 9.95E-01 9.93E-01
6
10 1.00E+00 1.00E+00 1.00E+00
20 9.98E-01 9.98E-01 9.98E-01
30 9.96E-01 9.97E-01 9.96E-01
SJY4
4
10 9.97E-01 9.94E-01 9.94E-01
20 9.96E-01 9.95E-01 9.94E-01
30 9.96E-01 9.96E-01 9.95E-01
5
10 1.00E+00 9.97E-01 9.96E-01
20 9.94E-01 9.94E-01 9.93E-01
30 9.94E-01 9.94E-01 9.93E-01
6
10 1.00E+00 1.00E+00 1.00E+00
20 9.96E-01 9.96E-01 9.96E-01
30 9.95E-01 9.95E-01 9.95E-01
SJY5
4
10 9.92E-01 9.90E-01 9.90E-01
20 9.96E-01 9.94E-01 9.94E-01
30 9.95E-01 9.95E-01 9.94E-01
5
10 9.99E-01 9.90E-01 9.85E-01
20 9.93E-01 9.93E-01 9.93E-01
30 9.94E-01 9.93E-01 9.94E-01
6
10 9.99E-01 9.99E-01 9.99E-01
20 9.93E-01 9.94E-01 9.95E-01
30 9.95E-01 9.95E-01 9.94E-01
strates better performance results in comparison with
the other algorithms utilized in this study.
It is evident that Dynamic Many-Objective Prob-
lems (DMaOPs) are relatively new and remain under-
explored. Therefore, exploring this area represents a
potential research direction. This exploration process
may involve proposing new scalable and dynamic test
instances, devising more effective performance mea-
sures, developing efficient algorithms, and studying
the effectiveness of proposed methodologies on real-
world problems.
REFERENCES
Azzouz, R., Bechikh, S., and Ben Said, L. (2017). Dynamic
multi-objective optimization using evolutionary algo-
rithms: a survey. Recent advances in evolutionary
multi-objective optimization, pages 31–70.
C.M. Fonseca, L. P. and Lopez-Ibanez, M. (2006). An
improved dimension-sweep algorithm for the hyper-
volume indicator. In 2006 IEEE International Con-
ference on Evolutionary Computation, pages 1157–
1163.
Coello, C. A. and Cortes, N. C. (2005). Solving multiob-
jective optimization problems using an artificial im-
mune system. Genetic Programming and Evolvable
Machines, 6(2):163–190.
Coello, C. A. C. and Lamont, G. B. (2004). Applications
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
286

of multi-objective evolutionary algorithms, volume 1.
World Scientific.
Deb, K., Bhaskara Rao N., U., and Karthik, S. (2007).
Dynamic multi-objective optimization and decision-
making using modified nsga-ii: A case study on
hydro-thermal power scheduling. In International
Conference on Evolutionary Multi-Criterion Opti-
mization, pages 803–817. Springer.
Deb, K. and Jain, H. (2014). An evolutionary many-
objective optimization algorithm using reference-
point-based nondominated sorting approach, part i:
Solving problems with box constraints. IEEE Trans-
actions on Evolutionary Computation, 18(4):577–
601.
Farina, M. and Amato, P. (2002). On the optimal solution
definition for many-criteria optimization problems. In
2002 Annual Meeting of the North American Fuzzy In-
formation Processing Society Proceedings. NAFIPS-
FLINT 2002 (Cat. No. 02TH8622), pages 233–238.
Farina, M., Deb, K., and Amato, P. (2004). Dynamic multi-
objective optimization problems: Test cases, approxi-
mations, and applications. Evolutionary Computation,
IEEE Transactions on, 8:425 – 442.
Geladi, P. and Linderholm, J. (2020). 2.03 - principal com-
ponent analysis. In Brown, S., Tauler, R., and Wal-
czak, B., editors, Comprehensive Chemometrics (Sec-
ond Edition), pages 17–37. Elsevier, Oxford, second
edition edition.
Goh, C.-K. and Tan, K. C. (2009). A competitive-
cooperative coevolutionary paradigm for dynamic
multiobjective optimization. IEEE Transactions on
Evolutionary Computation, 13(1):103–127.
Gupta, R. and Nanda, S. J. (2021). Solving dynamic many-
objective tsp using nsga-iii equipped with svr-rbf ker-
nel predictor. In 2021 IEEE Congress on Evolutionary
Computation (CEC), pages 95–102.
Jiang, M., Huang, Z., Qiu, L., Huang, W., and Yen, G. G.
(2017). Transfer learning-based dynamic multiobjec-
tive optimization algorithms. IEEE Transactions on
Evolutionary Computation, 22(4):501–514.
Jiang, S., Wang, Y., Hu, Y., Zhang, Q., and Yang, S. (2023).
Vector autoregressive evolution for dynamic multi-
objective optimisation.
Jiang, S. and Yang, S. (2014). A framework of scalable dy-
namic test problems for dynamic multi-objective opti-
mization. In 2014 IEEE Symposium on Computational
Intelligence in Dynamic and Uncertain Environments
(CIDUE), pages 32–39.
Jin, J. and Chen, Y. (2013). Var-based research on energy
consumption in china. In 2013 International Con-
ference on Computational and Information Sciences,
pages 1746–1749.
Jin, Y. and Branke, J. (2005). Evolutionary optimization in
uncertain environments-a survey. Trans. Evol. Comp,
9(3):303–317.
Jonathan D. Cryer, K.-S. C. (2008). Introduction, pages 1–
10. Springer New York, New York, NY.
Karkazan, K., Topcuoglu, H. R., and Sahmoud, S. (2023).
A new prediction-based algorithm for dynamic multi-
objective optimization problems. In International
Conference on the Applications of Evolutionary Com-
putation (Part of EvoStar), pages 194–209. Springer.
Li, H. and Zhang, Q. (2009). Multiobjective optimization
problems with complicated pareto sets, moea/d and
nsga-ii. IEEE Transactions on Evolutionary Compu-
tation, 13(2):284–302.
Li, L. D., Li, X., and Yu, X. (2008). Power generation load-
ing optimization using a multi-objective constraint-
handling method via pso algorithm. In 2008 6th IEEE
International Conference on Industrial Informatics,
pages 1632–1637.
S. Huband, P. Hingston, L. B. and While, L. (2006). A
review of multiobjective test problems and a scalable
test problem toolkit. IEEE Transactions on Evolution-
ary Computation, 10(5):477–506.
Sahmoud, S. and Topcuoglu, H. R. (2018). A type detec-
tion based dynamic multi-objective evolutionary algo-
rithm. In International Conference on the Applica-
tions of Evolutionary Computation, pages 879–893.
Springer.
Sahmoud, S. and Topcuoglu, H. R. (2019). Exploiting
characterization of dynamism for enhancing dynamic
multi-objective evolutionary algorithms. Applied Soft
Computing, 85:105783.
Sahmoud, S. and Topcuoglu, H. R. (2020). Memory-
assisted dynamic multi-objective evolutionary algo-
rithm for feature drift problem. In 2020 IEEE
Congress on Evolutionary Computation (CEC), pages
1–8. IEEE.
Tian, Y., Cheng, R., Zhang, X., and Jin, Y. (2017).
PlatEMO: A MATLAB platform for evolutionary
multi-objective optimization. IEEE Computational
Intelligence Magazine, 12(4):73–87.
Weizhen, H., Jiang, M., Gao, X., Tan, K. C., and Cheung,
Y.-m. (2019). Solving dynamic multi-objective opti-
mization problems using incremental support vector
machine. In 2019 IEEE Congress on Evolutionary
Computation (CEC), pages 2794–2799. IEEE.
Zhang, Q. and Li, H. (2007). Moea/d: A multiob-
jective evolutionary algorithm based on decomposi-
tion. IEEE Transactions on Evolutionary Computa-
tion, 11(6):712–731.
Zhu, X., Zhang, J., and Wu, Z. (2019). Many-objective
power flow optimization problems based on an im-
proved moea/d with dynamical resource allocation
strategy. In 2019 Chinese Automation Congress
(CAC), pages 3680–3685.
A Vector Autoregression-Based Algorithm for Dynamic Many-Objective Optimization Problems
287
