
Combating Agricultural Challenges with Secure Digital Farming
Cheikhou Akhmed Kane
1 a
and Pascal Francois Faye
2 b
1
Universit
´
e Rose Dieng France-S
´
en
´
egal, Dakar, Senegal
2
Department of Mathematics and Computer Science, Universit
´
e du Sine Saloum El Hadj Ibrahima NIASS, Kaolack, Senegal
Keywords:
Digital Farming, Machine Learning, Distributed Control.
Abstract:
This paper introduces Secure Digital Farming, a comprehensive approach to enhancing farm security and op-
timizing crop yield. SDF addresses critical challenges faced by modern agriculture, including climate change,
pest control, rural crime, and demographic pressures, all of which threaten agricultural perimeters and impact
yield. Our SDF-based solution leverages deep-learning algorithms to analyze sensor data and video streams
from security cameras, enabling intelligent access control, pest detection, and yield estimation. This paper
outlines the implementation framework for SDF, highlighting its feasibility for real-life testing and validation.
We plan to conduct field tests on our educational farm in the peanut basin of Senegal to evaluate the efficacy
and practicality of SDF in a real-world setting.
1 INTRODUCTION
Global agricultural yields are increasingly compro-
mised by climate change, input taxes, government
restrictions without farmer consensus, and various
security issues within farming environments. Fig-
ure 1 illustrates a comparison between a set of se-
curity issues and the corresponding security solu-
tions necessary to balance performance and social
welfare in farming. Additionally, farmers face ar-
duous labor, high equipment acquisition costs, risks
associated with pests (insects, wild animals, domes-
tic animals, etc.), rising rural crime rates, and demo-
graphic expansion that threatens agricultural perime-
ters. This balance is delicate, as attackers—including
humans, animals, insects, bacteria, nematodes, and
termites—consistently devise methods to circumvent
security measures.
Farmers typically secure their farms based on re-
current risks in their area using techniques familiar to
aggressors. Therefore, it is crucial to categorize all
potential risks, even the least likely ones, to develop
comprehensive solutions. However, relying on real-
time monitoring by guards or watchdogs has physio-
logical limitations such as sleep, hunger, and exhaus-
tion, which can hinder effective performance. A well-
trained distributed artificial intelligence (AI) system
can process large volumes of data and make better
a
https://orcid.org/0009-0000-9341-2466
b
https://orcid.org/0000-0002-2078-5891
decisions without experiencing fatigue or biased judg-
ment, offering a more reliable alternative for securing
farms.
Figure 1: Farm’s security solutions versus threats that af-
fects farm effectiveness.
Fig. 2 below shows different field in order to en-
sure a secured digital farming. Despite technological
advances, the management of agricultural perimeters
remains a persistent challenge, particularly in regions
like the peanut basin of Senegal. In this study, we
advocate for the implementation of an artificial intel-
ligence (AI) system to address critical security issues
in agricultural fields. The integration of AI has proven
beneficial and sustainable across various sectors, in-
cluding arboricultural farming.
An arboricultural farm is defined by its capacity to
produce fruit, operate independently day-to-day, and
meet specified thresholds in both area and fruit pro-
duction. The suitability of soil types, such as clay-
sandy, airy, supple, fertile, and cool, varies across
376
Kane, C. A. and Faye, P. F.
Combating Agricultural Challenges with Secure Digital Farming.
DOI: 10.5220/0013011800003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 376-383
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
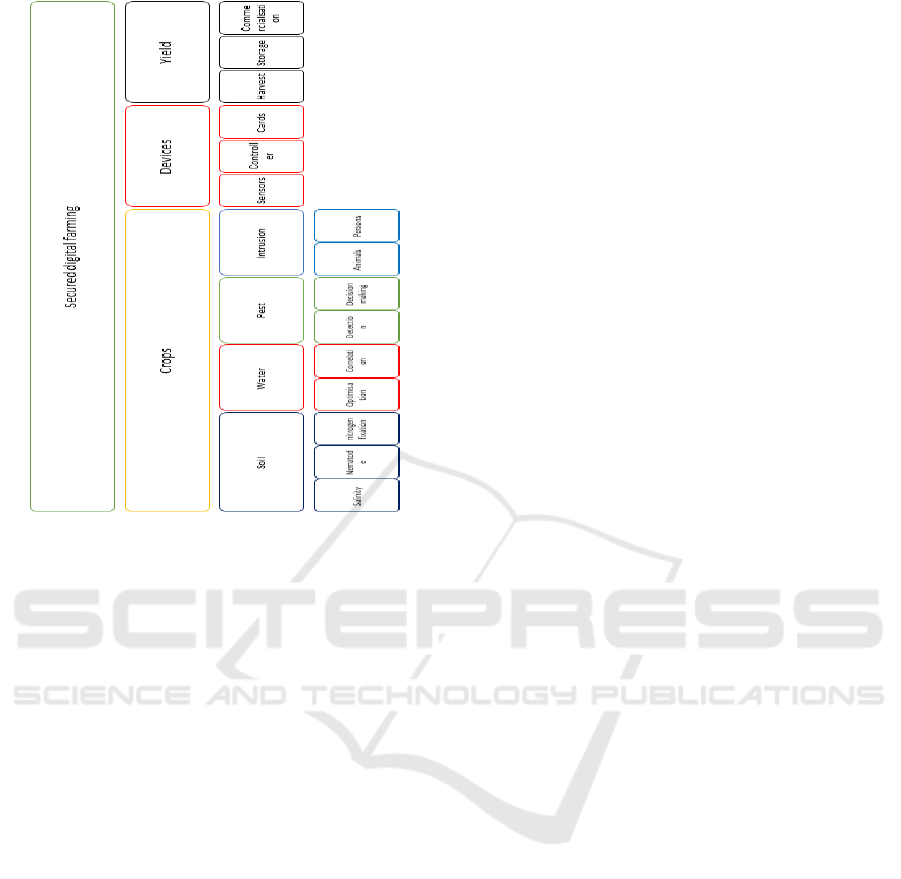
Figure 2: The main components for secure agricultural
spaces with the contribution of digital.
the Senegalese peanut basin, influenced further by the
challenges posed by climate change. Each type of soil
presents unique advantages and challenges. Arbori-
cultural environments are complex due to the size of
trees, their foliage, and the diverse activities occur-
ring within them, such as pest monitoring and poten-
tial intrusions by animals or humans. Therefore, aid-
ing farmers in identifying these activities, situations,
or specific trees on their farms is crucial. This identi-
fication process spans various stages of tree growth
and fruit development, with particular emphasis on
pre-harvest planning. AI is particularly suitable for
this task due to its capability to analyze large volumes
of data efficiently, identify patterns, and provide pre-
dictive insights, thereby enabling farmers to optimize
resource allocation and anticipate yield outcomes ef-
fectively.
The objective of this work is to develop an ap-
plication employing various machine learning tech-
niques, such as deep learning and K-nearest neigh-
bors, to enhance farm management and security. This
application will be capable of detecting and recogniz-
ing activities, machinery, and agronomic equipment
on farms. Additionally, it will monitor the farm envi-
ronment, assist farmers in predicting yields, and help
anticipate attacks or intrusions. Our proposed ap-
proach focuses on securing access to different cate-
gories of crops and trees, thereby preserving yield.
2 RELATED WORK
(Sellam and Poovammal, 2010) investigates the im-
pact of environmental factors, such as annual rainfall
and cultivated area, on crop yield using multivariate
regression analysis over a 10-year period. The study
finds a strong correlation between these factors and
yield, as indicated by R
2
value. While the authors ac-
knowledge the potential influence of economic factors
(e.g., minimum support price, cost price index, etc..),
they do not consider crop security aspects like pest
or intrusion detection. (Zhang et al., 2010) compares
the accuracy of linear regression and a spatial au-
toregressive model for predicting corn yield in Iowa.
The study demonstrates the superiority of the autore-
gressive model, which accounts for spatial autocor-
relation not captured by OLS, leading to improved
predictions. While highlighting the importance of
NDVI (Normalized Difference Vegetation Index) and
precipitation as predictors, the study does not incor-
porate other factors like soil health or pest infesta-
tions. (Zingade et al., 2018) introduces an Android
application and website that leverage machine learn-
ing to recommend the most profitable crops based on
current weather, soil, and environmental conditions.
This system aids farmers in crop selection for long-
term profitability but overlooks crop security consid-
erations. (Sun et al., 2022b) focuses on a different
aspect of crop management, proposing an improved
density peak clustering algorithm for RGB images,
incorporating depth information to locate and rec-
ognize target fruit (green apples) for harvesting or
yield estimation. However, this approach also ne-
glects security factors. (Feng et al., 2022a) focuses on
disease identification in crops using image process-
ing techniques, employing morphological operations,
contrast stretching, and image scaling for preprocess-
ing, followed by circle-fitting-based segmentation of
leaf lesions. Classification is then performed using
SVM and random forest models trained on LBP his-
togram features. While this approach addresses dis-
ease detection, it does not consider broader security
aspects. (Fu et al., 2022) introduces a rapeseed dataset
and a target-dependent neural architecture search for
analysis. Addressing the challenges of data loss and
misrepresentation in smart agriculture, (Cheng et al.,
2022) proposes an anomaly detection model for mul-
tidimensional time series data. (Uyeh et al., 2022)
employs a multi-objective machine learning approach
to optimize sensor placement in a protected cultiva-
tion system, utilizing a gradient boosting model with
observed and derived environmental variables. (Maia
et al., 2022) analyzes sensor data from Australian cot-
ton fields, revealing a correlation between soil matric
Combating Agricultural Challenges with Secure Digital Farming
377

potential and satellite-derived cumulative crop evapo-
transpiration, but does not provide yield comparisons.
(Feng et al., 2022b) focuses on disrupting the mat-
ing of brown planthoppers (BPH), a significant rice
pest. They develop a system to record, monitor, and
playback BPH courtship vibrations, identifying key
frequencies for potential disruption strategies. (Sun
et al., 2022a) tackles the problem of monitoring mi-
gratory rice pests by developing an intelligent system.
This system utilizes a searchlight trap to capture in-
sects, which are then automatically identified using
computer vision, providing real-time monitoring data.
These studies highlight various aspects of smart agri-
culture, but a holistic approach that integrates farm
security considerations into yield estimation has not
been fully addressed. In this work, our goal is to use a
set of AI algorithms for the detection and the recogni-
tion of objects (person, animals, truck, car, etc.), trees,
and fruits in a farm for safety and harvest prediction
in a farm environment.
3 SYSTEM DESCRIPTION
Knowledge on farm security and its effects on the
various sectors of the national economy is a major
challenge for the country’s policymakers. Various ini-
tiatives are therefore being developed to better iden-
tify the implications of risks in the agricultural sec-
tor. However, while a causal relationship has clearly
been established between the vulnerability of the agri-
cultural sectors and a set of risks on crops, livestock,
machinery, etc. Supporting farmers to better manage
the risks associated with security is a major necessity.
All economic activities which promote food security
and suitable agriculture must incorporate the risks of
farm management into their planning. The aims of
this work are proposing :
1. An intrusion detection system that automates the
intrusion detection process.
2. An intrusion prevention system that can detect
and also attempt to stop possible incidents.
3. An network topology for a secure digital farming
This by using a full mesh sensor network, a set of
IOT card for local and remote control. In order to
improve decision making we store information in a
local database server and on a ThingSpeak platform.
In this way, a farmer can make decisions based on a
real-time view of his or her farm. This work combines
several Machine learning algorithms (ML) like:
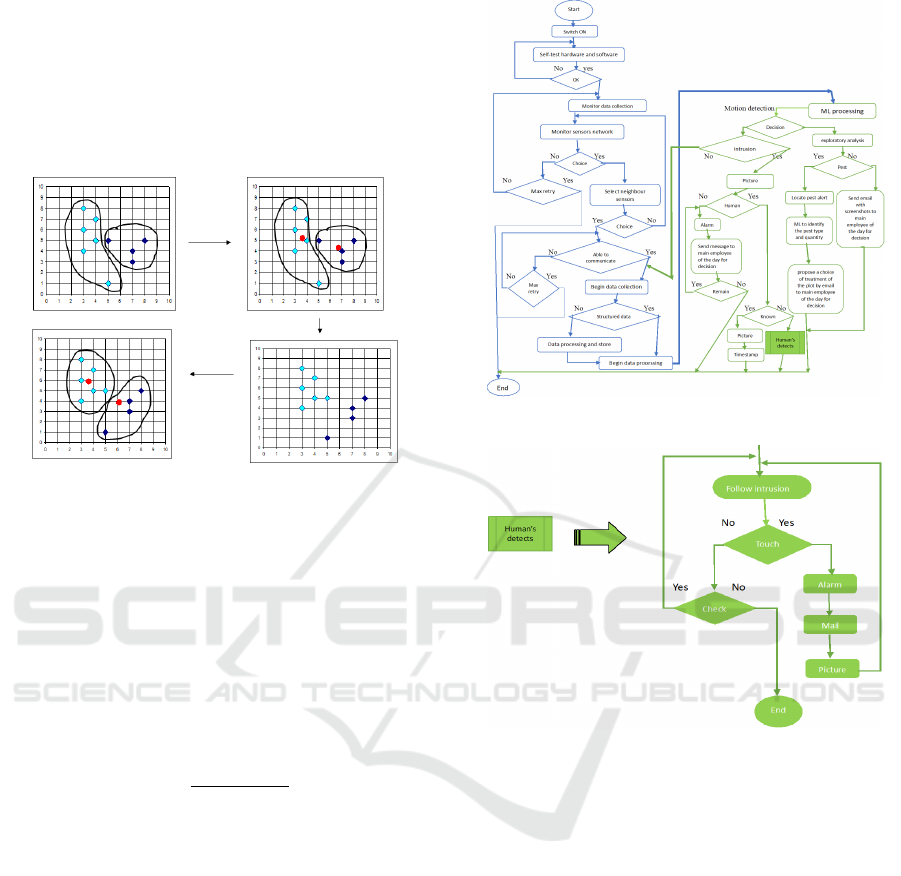
1. Deep Learning (see Fig 3) ;
2. K-Nearest Neighbours (see Fig 4).
This combination delivers a solution that addresses
well the dynamism and uncertainty challenges tar-
geted in this work.
3.1 Preliminaries
In this part, we will give a set of analytic view for un-
derstanding of our solution. This work is based on AI
algorithms like Deep Learning and K-Nearest Neigh-
bours. The Deep Learning is a subcategory of neural
networks. Indeed, it is a set of tools and methods of
machine learning based on the use of neural networks.
We use the words Deep in reference to the number of
layers of neurons that make up these networks: the
greater the number of layers the deeper the network
and the more it allows to treat complex learning prob-
lems, but the harder it is to train.
Figure 3: Visual neural network with 4 layers.
In these mathematical architectures, each neuron
performs simple calculations but the input data passes
through several layers of computation before produc-
ing an output. The results of the first layer of neurons
serve as input to the calculation of the next layer and
so on. It is possible to switch on different parameters
of the network architecture, like: the number of lay-
ers, the type of each layer, the number of neurons that
make up each layer. A Deep Learning algorithm can
be summarised by the steps:
• Forward propagation
• Cost function
• Backward propagation
• Gradient descendent
Further information about Deep Learning can be
found in (Schmidhuber, 2015).
The K-Nearest Neighbours (kNN) algorithm
is an ML algorithm that belongs to the class of
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
378
unsupervised learning algorithms that can be used
to solve classification and regression problems. In
unsupervised learning, an algorithm receives a data
set that is tagged with corresponding output values on
which it will be able to train and define a prediction
model. This algorithm can subsequently be used on
new data in order to predict their output values.
Figure 4: Visual cluster assignment.
The main steps of the KNN algorithm are:
• Step 1: Find the appropriate number of K, by us-
ing Elbow method (Umargono et al., 2020);
• Step 2: Select the number K of neighbours;
• Step 3: Calculate
Euclidian distance
n
∑
i=1
|X
i
−Y
i
| (1)
or Manhattan distance;
s
n
∑
i=1
(X
i
−Y
i
)
2
(2)
• Step 4: Take the K-Nearest Neighbours according
to the calculated distance.
• Step 5: Count among these K neighbours, the
number of points belonging to each cluster.
• Step 6: Assign the new point to the category most
present among these K neighbours.
• Step 7: Our model will be ready when all points
are in a cluster
3.2 Main Steps of Our Mechanism
In this section, we present the operational architec-
ture and working principles of our mechanism as il-
lustrated in Figures 5 and 6, respectively.
Figure 5: Visual illustration of our mechanism.
Figure 6: Main steps when a human is detected.
4 IMPLEMENTATION
In this section, we explain the steps we follow for im-
plementation and tests in a real-life environment. Our
environment is one hectare with sides of the same
size. We started with the virtual grid to identify the
number of optimal access points we will need to cover
our field. This, to ensure that, there is no white
space (without Wi-Fi coverage) that can prevent sen-
sors from transmitting their data. We have used access
points with 20-60 meters of reach for a mesh network
that seamlessly connects machinery, sensors, etc. en-
suring uninterrupted harvesting and other agriculture
operations by establishing a self-configuring network.
Thus, the maximum diameter is D = 120 meters as
shown in Fig 8.
• Access point ray coverage
20 meters < r < 60 meters (3)
Combating Agricultural Challenges with Secure Digital Farming
379
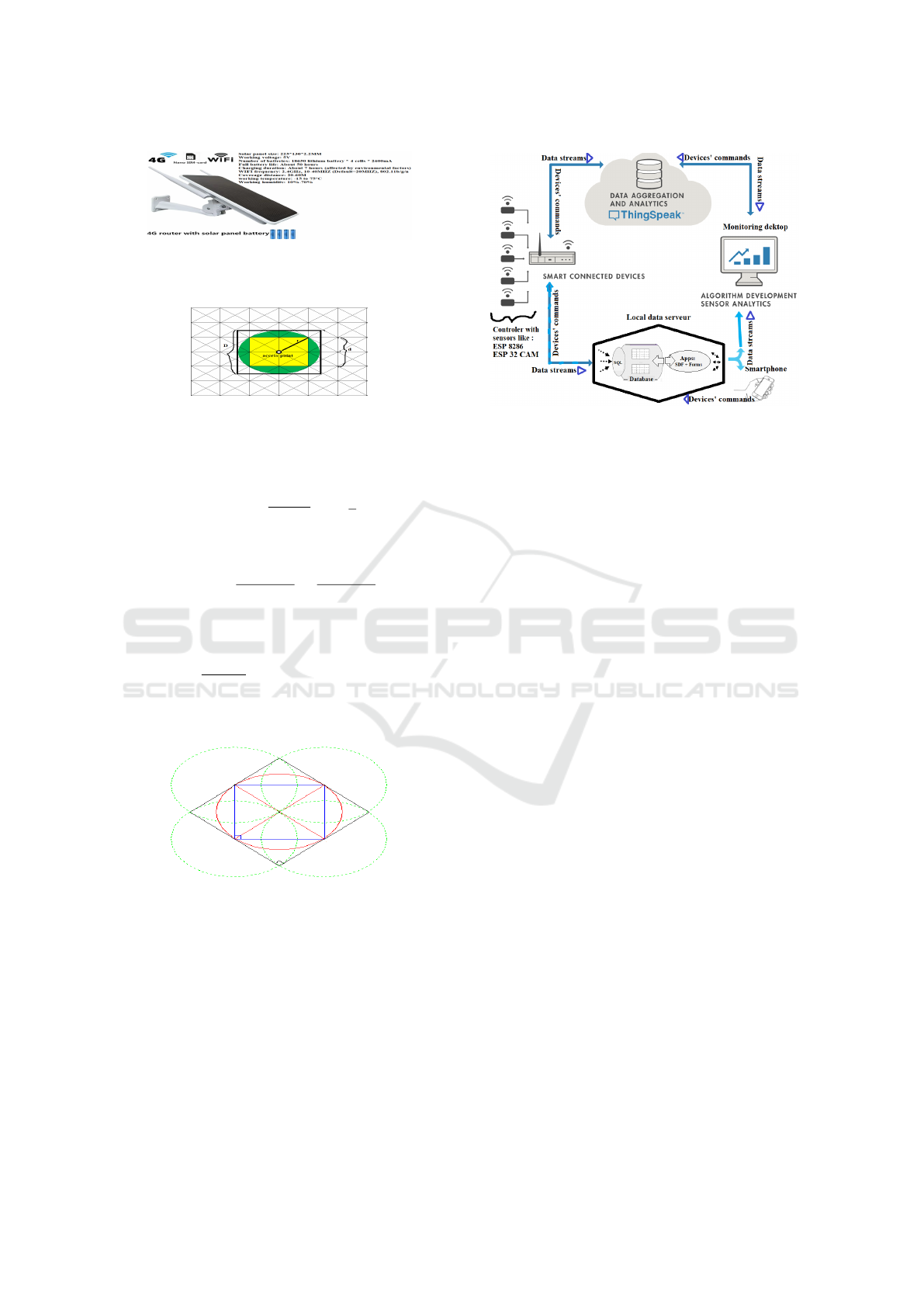
Figure 7: Access point : 6W 4G solar router;WiFi re-
peater;4G router solar powered all in one;IP66 Water-
proof;Customized according to different regions.
Figure 8: Virtual grid to identify the required access point
required for 1 hectare. This to set up a sensor network for
data collection. This proposition for 1 hectare is a sampling
in order to show how to cover a farm.
• We can have a inside square
d =
p
r
2
+ r
2
= r
√
2 (4)
• On one hectare we will have
X =
1 hectare
d
2
=
1 hectare
2r
2
(5)
In this work, we assume that, due to trees and other
farm’s component which block the signal, the bet-
ter coverage distance we can have is r = 35 meters.
we need X =
1 hectare
2r
2
= 4 access points in our farm’s
mesh network with an overlapping signals range (see
Fig. 9) to prevent a sensor from being without a Wi-
Fi signal. This implementation produce a set of data
Figure 9: Overlapping signals range to avoid white space.
collected through an IOT network which can be rep-
resented by the Fig 10.
The data are collected via:
• sensors : ultrasonic, infra-red, thermal, pressure,
RGB, UV, rain, temperature, accelerometer, PIR
motion, ultrasonic transducer, obstacle detector,
vibration detectors.
• cards : ESP 8266, ESP CAM, ARDUINO UNO,
servomotors to control equipment (access, sensor,
fence, pump, tractor, irrigation, etc.), to have vi-
sual data, sound data and create a mesh network
Figure 10: Data network of our Secure Digital Farming En-
vironments.
of field sensors that will serve as a medium for
transmitting data from sensors but also user con-
trols.
– The different cards are connected to the access
point networks to transmit their data. The data
is sent simultaneously on the ThingSpeak plat-
form and on our local server via https (Hyper-
text Transfer Protocol Secure) and SQL (Struc-
tured Query Language) requests.
*
In our local server, we have a web applica-
tion that implements our SDF algorithm and
creates data visualization to support decision
making.
*
ThingSpeak (MathWorks, 2024) is a cloud
IoT analytics platform service that allows to
aggregate, visualize, and analyze live data
streams. We send data to ThingSpeak from
our devices, create instant visualization of live
data, and send alerts. We could set up more
features such as turning on a motor when the
water level in the water tank drops below a
specified limit er even remotely control de-
vices, such as battery-operated door locks.
· Send sensor data privately to our cloud ac-
count.
· Analyze and visualize data with MATLAB.
· Trigger a reaction after a threshold value or a
queue up command for a device to execute.
*
• Viewing data or launching commands can be done
via smart-phone or computer.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
380

5 RESULTS
In this section, we give a set of theorems to prove the
reliability and feasibility of our system. As we use a
set of IOT device, we define a sensor σ ∈ Σ which
is constrained by the parameters: {Rσ
i
,ϑ
t
σ
i
,L
Net
}.
Rσ
i
is its resource(s). A view ϑ
t
σ
i
is the set of
sensors in its neighborhood with whom it can directly
communicate at time t. L
Net
defines the dependence
level between the received data in a given sensors
network (Net).
Corollary 1. For each Access Point (AP) coverage, it
exists an inside square.
Proof. Let AP be an access point centered at A =
(x,y) with ray coverage r. Consider a square with
center A and side length d = r. The distance from A
to any vertex is
r
√
2
. Since
r
√
2
< r, the vertices of the
square lie within the circle.
This proves our corollary.
Theorem 1. ∀ S as a farm’ size, it exists a finite
number X of access points (AP) for sensor data
transmission.
Proof. Let r an access point (AP) ray coverage and
S a farm’ size. Thus, ∀ AP coverage ∃ (d ∗d) as a
square include in S = πr
2
((d ∗d) ⊂ S/d is the side of
the square (cf. corollary 1).
This proves our theorem, ∀S,∃X =
S
d
2
∈N
N
N.
Lemma 1. ∀ S as a farm’ size, a sensor belongs at
least in one AP’ signal range.
Proof. Let σ
j
∈ Σ be a sensor in this network de-
ployed in a farm of size S. Due to our overlapping
AP topology signal range, it exists at least one AP
which can allow data transmission. In addition, ∀ AP
it transmits data with MIMO (Multiple Input Multiple
Output) strategy and may allows fifty (50) simultane-
ous sensor data transmission.
Theorem 2. ∀ S as a farm’ size, if an intrusion
happen, it exists at least one sensor which can detect
the event.
Proof. Let σ
j
∈ Σ a sensor in this network deployed
in a farm of size S. Due to our overlapping AP topol-
ogy signal range and MIMO strategy, there exists at
least one AP which can allow data transmission for
Cap (cf. Lemma 1). Therefore, if an intrusion hap-
pens anywhere within the farm, it will be within the
detection range of at least one sensor. Thus, for any
farm size S, if an intrusion happens, there exists at
least one sensor which can detect the event.
Lemma 2. The message costs are bounded and poly-
nomial for each sensor σ until the convergence of net-
work.
Proof. Let
¯
Msg be the message cost of our sensor net-
work and σ
j
∈Σ be a sensor in this network. For each
σ
j
∈ Σ, if it probes its neighborhood, it sends 2 mes-
sages (one for the probe and another for the acknowl-
edgment from the receiver). Additionally, σ
j
may
receive messages from its neighboring sensors. The
number of these neighbors is denoted by Card(ϑ
t
σ
j
),
where ϑ
t
σ
j
represents the set of neighbors at time t.
Thus, 2 ≤
¯
Msg ≤ Card(ϑ
t
σ
j
). For each σ
j
∈ Σ, if a
network layer L
Net
exists, σ
j
sends 1 message to its
non-zero neighbor set ϑ
t
σ
j
̸= 0. Additionally, σ
j
must
send 1 response message after receiving input from its
neighbor sensors in ϑ
t
σ
j
. Thus, initially,
¯
Msg = 2 for
the probe and acknowledgment. If additional infor-
mation is received after detection, an extra message is
needed, making
¯
Msg = 3. Since the number of sen-
sors is limited in any neighborhood ϑ
t
σ
j
, the value of
Card(ϑ
t
σ
j
) is bounded. Therefore, the message cost
¯
Msg is not exponential but polynomial in the number
of sensors. This proves our lemma.
Lemma 3. ∀ sensor σ
j
, the energy cost is optimized.
Proof. Let
¯
Msg be the message cost of our sensor net-
work and σ
j
∈ Σ be a sensor in this network.
¯
Msg is
bounded and polynomial (cf. Lemma 2). σ
j
∈ Σ con-
sumes energy during data transmission, i.e the energy
cost is proportional to communication, the number of
messages sent. Therefore, it is also bounded and poly-
nomial. This ensures controlled and optimized energy
consumption. This proves our lemma.
Theorem 3. For each decision-making, it is the
better and rational we can do without human inter-
actions.
Proof. Let σ
j
be a sensor in the network. Our over-
lapping AP topology and MIMO strategy ensure reli-
able data transmission. All intrusions are detected by
at least one sensor σ
j
(cf. Theorem 2). This guaran-
tees that sensors have access to complete and accurate
data for decision-making. Since the network’s com-
munication framework ensures data completeness and
reliability, sensors can make well-informed and ratio-
nal decisions autonomously. The bounded and poly-
nomial nature of the message cost
¯
Msg and optimized
energy use further support this capability by ensuring
Combating Agricultural Challenges with Secure Digital Farming
381

efficient communication. Thus, the decision-making
process within the network is both optimized and ra-
tional, operating effectively without human interac-
tions. This proves our theorem.
Lemma 4. The near and most reliable sensors of the
neighbourhood ϑ
t
σ
j
of the sensor σ
j
which initiate the
network have always more ability to be selected as a
data relay.
Proof. Let σ
j
be the initiating sensor in the network,
and let ϑ
t
σ
j
denote its neighborhood view. Consider
two random sensors σ
k
and σ
l
from ϑ
t
σ
j
. Let d(σ
j
,σ
k
)
and d(σ
j
,σ
l
) be the distances from σ
j
to σ
k
and σ
l
,
respectively. Let ρ(σ
k
) and ρ(σ
l
) represent the re-
liabilities of σ
k
and σ
l
, respectively. The reliability
ρ(σ
i
) of a sensor σ
i
is computed using the Poisson
Law (Yates and Goodman, 2005). Suppose the num-
ber of times a sensor fails to transmit data follows a
Poisson distribution with an average rate of failure oc-
currences λ per unit time. The number of failures N
f
in a time interval t is given by:
P(N
f
= k) =
(λ)
k
e
−λ
k!
where λ is the expected number of failures in time t.
The reliability ρ(σ
i
) is then defined as:
ρ(σ
i
) = 1 −
Number of failures
Total number of
opportunities for transmission
which, in terms of the Poisson parameter λ , be-
comes:
ρ(σ
i
) = 1 −
λ
Total number of opportunities
Assume d(σ
j
,σ
k
) < d(σ
j
,σ
l
), indicating σ
k
is
closer to σ
j
than σ
l
, and ρ(σ
k
) ≥ ρ(σ
l
), implying σ
k
has equal or higher reliability compared to σ
l
.
Since the reliability ρ(σ
i
) is inversely related to
the number of failures, sensors with a lower rate of
failures (higher ρ) are more reliable. The probability
of a sensor being selected as a data relay is positively
correlated with its reliability and effective communi-
cation role. Thus, sensors that are both closer to σ
j
and have a higher reliability ρ are more likely to be
selected as data relays compared to those further away
or with lower reliability. Therefore, sensors closer to
σ
j
and with higher ρ are more likely to be selected as
data relays.
This proves our lemma.
Theorem 4. The protocol SDF, is auto-stabilizing if
a full connected network is reached.
Proof. Let Σ be the set of all sensors in the network,
and SDF be our secure digital farming protocol. We
aim to show that SDF is auto-stabilizing, meaning it
can recover from any transient faults and eventually
reach a stable state where all sensors are correctly
functioning in a fully connected network.
In a fully connected network, every sensor σ
i
∈
Σ can directly communicate with every other sensor
σ
j
∈ Σ. This ensures that each sensor has complete
and accurate data about the network.
The message costs
¯
Msg are bounded and polyno-
mial for each sensor σ
i
until the network converges
(cf. Lemma 2). This ensures that communication
overhead remains manageable and efficient.
From our earlier results, for any farm size S, if an
intrusion occurs, there exists at least one sensor that
can detect the event. This implies that the protocol
can maintain security by ensuring that intrusions are
always detected.
Lemma 4 shows that the nearest and most reliable
sensors in the neighborhood of any given sensor σ
i
have a higher probability of being selected as data re-
lays. Thus, sensors with higher reliability are more
likely to be selected, which contributes to the stability
of the network.
Given that SDF ensures reliable communication
and intrusion detection in a fully connected network,
the protocol can recover from any transient faults.
Even if some sensors temporarily fail or produce in-
correct data, the protocol’s design ensures that the net-
work will eventually stabilize. The bounded message
costs and efficient selection of reliable sensors con-
tribute to this auto-stabilization. Thus, the protocol
SDF is auto-stabilizing in a fully connected network.
This proves our theorem.
6 CONCLUSIONS
This paper presents a comprehensive approach to
enhancing farm security and optimizing crop yield,
introducing the Secure Digital Farming protocol.
We have defined the feasibility of our SDF-based
solution, which addresses critical challenges faced
by modern agriculture, including climate change,
pest control, rural crime, and demographic pressures.
SDF leverages deep-learning algorithms to analyze
sensor data and video streams from security cameras,
enabling intelligent access control, pest detection,
and yield estimation. We present an implementation
framework ready for real-life testing and validation.
To further validate our solution’s efficacy and
practicality, we will conduct field tests on our educa-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
382

tional farm. This controlled environment will allow us
to rigorously evaluate its performance and fine-tune
its components. Future work will focus on assessing
the scalability of our SDF-based approach for appli-
cation in diverse farming contexts. We will also ex-
plore potential collaborations to refine and implement
the solution on a larger scale and evaluate the social
impact of our technology, particularly its potential to
improve farmer livelihoods and promote sustainable
agricultural practices.
REFERENCES
Cheng, W., andXiaoting Wang, T. M., and Wang,
G. (2022). Anomaly detection for internet of
things time series data using generative adversar-
ial networks with attention mechanism in smart
agriculture. Frontiers in Plant Science, page
https://doi.org/10.3389/fpls.2022.890563.
Feng, Q., Wang, S., Wang, H., Qin, Z., and Wang,
H. (2022a). Circle fitting based image segmen-
tation and multi-scale block local binary pattern
based distinction of ring rot and anthracnose on
apple fruits. Frontiers in Plant Science, 13:doi:
10.3389/fpls.2022.884891.
Feng, Z., Wei, Q., Ye, Z., Yang, B., Gao, Y., Lv, J.,
Dai, Y., Bao, J., and Yao, Q. (2022b). Vibrational
courtship disruption of nilaparvata lugens using arti-
ficial disruptive signals. Frontiers in Plant Science,
13:https://doi.org/10.3389/fpls.2022.897475.
Fu, L., Li, S., Rao, Y., Liang, J., Teng, J., and He, Q. (2022).
A novel heuristic target-dependent neural architecture
search method with small samples. Frontiers in Plant
Science, page 10.3389/fpls.2022.897883.
Maia, R. F., Lurbe, C. B., and Hornbuckle, J. (2022).
Machine learning approach to estimate soil matric
potential in the plant root zone based on remote
sensing data. Frontiers in Plant Science, page
https://doi.org/10.3389/fpls.2022.931491.
MathWorks, I. (2024). Data collection in the cloud with
advanced data analysis using matlab.
Schmidhuber, J. (2015). Deep learning in neural networks:
An overview. neural networks. Official Journal
of the International Neural Network Society, 61,
https://doi.org/10.1016/j.neunet.2014.09.003:pages
85–117.
Sellam, V. and Poovammal, E. (2010). Prediction of crop
yield using regression analysis. IEEE Trans. Knowl.
Data Eng., pages vol. 23, no. 10, pp. 1498–1512.
Sun, G., Liu, S., Luo, H., Feng, Z., Yang, B., Luo, J., Tang,
J., Yao, Q., and Xu, J. (2022a). Intelligent monitor-
ing system of migratory pests based on searchlight
trap and machine vision. Frontiers in Plant Science,
13:https://doi.org/10.3389/fpls.2022.897739.
Sun, M., Xu1, L., Luo, R., Lu, Y., and Jia, W. (2022b).
Fast location and recognition of green apple based
on rgb-d image. Frontiers in Plant Science, 13:doi:
10.3389/fpls.2022.864458.
Umargono, E., Suseno, J. E., and K., V. G. S. (2020).
K-means clustering optimization using the elbow
method and early centroid determination based-on
mean and median. International Conferences on In-
formation System and Technology (CONRIST 2019,
DOI: 10.5220/0009908402340240:pages 234–240.
Uyeh, D. D., Iyiola, O., Mallipeddi, R., Asem-Hiablie,
S., Amaizu, M., Ha, Y., and Park, T. (2022). Grid
search for lowest root mean squared error in pre-
dicting optimal sensor location in protected culti-
vation systems. Frontiers in Plant Science, page
https://doi.org/10.3389/fpls.2022.920284.
Yates, R. D. and Goodman, D. J. (2005). Probability
and Stochastic Processes: A Friendly Introduction for
Electrical and Computer Engineers. John Wiley and
Sons, INC, Rutgers, The State University of New Jer-
sey.
Zhang, L., Lei, L., and Yan, D. (2010). Comparison of
two regression models for predicting crop yield. IEEE
International Symposium on Geoscience and Remote
Sensing (IGARSS).
Zingade, P. D. S., Buchade, O., Mehta, N., Ghodekar, S.,
and Mehta, C. (2018). Machine learning-based crop
prediction system using multi-linear regression. Inter-
national Journal of Emerging Technology and Com-
puter Science (IJETCS), pages Vol 3, Issue 2.
Combating Agricultural Challenges with Secure Digital Farming
383
