
Step Size Control in Evolutionary Algorithms for Neural
Architecture Search
Christian Nieber
1 a
, Douglas Mota Dias
2 b
, Enrique Naredo Garcia
3 c
and Conor Ryan
1 d
1
Department of Computer Science and Information Systems, University of Limerick, Limerick, Ireland
2
Department of Computer Science & Applied Physics, Atlantic Technological University, Galway, Ireland
3
Departamento de Ciencias Básicas, Universidad del Caribe, Cancun, Mexico
Keywords: Step Size Control, Evolutionary Algorithms, Neural Architecture Search, Lightweight CNNs, MNIST, LeNet.
Abstract: This work examines how evolutionary Neural Architecture Search (NAS) algorithms can be improved by
controlling the step size of the mutation of numerical parameters. The proposed NAS algorithms are based on
F-DENSER, a variation of Dynamic Structured Grammatical Evolution (DSGE). Overall, a (1+5)
Evolutionary Strategy is used. Two methods of controlling the step size of mutations of numeric values are
compared to Random Search and F-DENSER: Decay of the step size over time and adaptive step size for
mutations. The search for lightweight, LeNet-like CNN architectures for MNIST classification is used as a
benchmark, optimizing for both accuracy and small architectures. An architecture is described by about 30
evolvable parameters. Experiments show that with step size control, convergence is faster, better performing
neural architectures are found on average, and with lower variance. The smallest architecture found during
the experiments reached an accuracy of 98.8% on MNIST with only 5,450 free parameters, compared to the
62,158 parameters of LeNet-5.
1 INTRODUCTION
1.1 Neural Architecture Search
Deep Convolutional Neural Networks (CNNs) are
used for state-of-the-art (SOTA) image classification
and segmentation tasks, like recognizing objects in a
street scene. Designing and optimizing CNNs and
other high-performing neural architectures is
challenging and requires expert knowledge. Hence,
there is great interest in automating the search for a
well-performing neural architecture for a given
problem. An extensive overview of current NAS
methods was conducted by (White et al., 2023).
Search spaces used for NAS can be conceptually
grouped as narrow or wide. A narrow search space is
one with few free variables, often of a single type
(numeric or topological), where layer arrangement
constraints, variables and their ranges are chosen to
closely match architectures known to work well.
a
https://orcid.org/0009-0002-6208-4097
b
https://orcid.org/0000-0002-1783-6352
c
https://orcid.org/0000-0001-9818-911X
d
https://orcid.org/0000-0002-7002-5815
Numeric parameters are often constrained to a small
set of values. In this work, a wide search space is
understood as one using a wider range of layer
arrangements, more parameters of more varied types,
larger numeric ranges, and continuous values. A wide
search space can also be characterized as one
containing only a small proportion of high-
performing architectures.
(Yang et al., 2019) and (Yu et al., 2020) have
shown that several state-of-the-art NAS methods like
DARTS, PNAS and ENAS do not perform much
better than randomly sampling their search space:
“the small range of accuracies obtained [by random
sampling] hints at narrow search spaces, where even
the worst architectures perform reasonably well”
(Yang et al., 2019)
This paper proposes using relatively wide search
spaces on lightweight CNNs as a benchmark so that
NAS methods can be compared more reliably.
288
Nieber, C., Dias, D., Garcia, E. and Ryan, C.
Step Size Control in Evolutionary Algorithms for Neural Architecture Search.
DOI: 10.5220/0013013800003837
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 288-295
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

1.2 Contribution
We explore the question of how step size control can
improve evolutionary NAS algorithms. In this work,
step size control is understood as the algorithmic
control of the magnitude of mutations of numeric
parameters and, in some cases, the probability of
mutations of network topology or categorical
parameters. We propose two simple methods of step
size control, which we call Stepper algorithms. In
Stepper-Decay, a single global step size parameter
decays over time. In Stepper-Adaptive, a step size
parameter is associated with each individual and is
subject to mutation and selection so that the step size
can slowly be adapted towards an optimal value.
To assess the effectiveness of these algorithms,
we developed a benchmark using lightweight CNN
architectures that is relatively fast to compute, has, on
average, about 30 evolvable parameters, and a wider
search space than almost any published NAS
benchmark. The Stepper algorithms are compared to
the F-DENSER algorithm, which they are based on
(which has no step size control), and additionally to
Random Search. The fitness function is chosen so that
the search optimizes for 1) low error rate and 2) small
architectures.
The experiments show that with these simple
methods of step size control, convergence is faster,
better performing neural architectures are found on
average, and with lower variance.
2 BACKGROUND AND RELATED
WORK
2.1 Evolution Strategies and Step Size
Control
Evolution Strategies (ES) are robust optimization
algorithms often used for black box optimizations on
real-valued parameter spaces (Rechenberg, 1994;
Schwefel, 1995). They were originally developed
mainly for engineering problems.
While step size control is rarely used with Genetic
Algorithms (Holland, 1992), it is widely used with
ESs, starting with Rechenberg’s 1/5
th
rule
(Rechenberg, 1965). Many variations were explored,
including Self-adaptive ES (Schwefel, 1995) and
Differential Evolution (Storn & Price, 1997). CMA-
ES (Hansen & Ostermeier, 2001) is a SOTA
optimizer for continuous black-box functions. It can
be interpreted as controlling a step size not only for
each parameter but also for each pair of parameters.
(Loshchilov et al., 2013) showed that CMA-ES
performed best out of more than 100 classic and
modern optimizers on a wide range of black-box
benchmark functions.
(Droste & Wiesmann, 2000) and (Li et al., 2013)
suggest guidelines for the choice of mutation
operators, including Locality (Solutions can be
gradually improved, and mutations can generate
similar solutions) and Scalability (An efficient
method should be used to control the strength of the
impact of the mutation operator on the fitness values).
2.2 Genetic Algorithms and
F-DENSER
Genetic Algorithms apply mutation, recombination
and selection on a bit string representing an individual
(Holland, 1992). Genetic Programming is an
extension of this concept to the evolution of functions
built from inputs, constants, and operators (Cramer,
1985; Koza, 1989). Grammatical Evolution (GE) is a
genetic algorithm that evolves programs that conform
to context-free grammar (Ryan et al., 1998).
The search algorithm used in this work is based
on Fast DENSER, also called F-DENSER (Assunção
et al., 2019). DENSER (Assunção et al., 2018) is an
extension of Dynamic Structured Grammatical
Evolution (DSGE) (Assunção et al., 2017). DENSER
used a population of 100 for 100 generations. F-
DENSER introduced a
ES and removed
crossover. Instead of using DSGE mutations, specific
probabilities of 15-25% are used for the different
kinds of layer mutations. This reduced the number of
evaluations drastically without compromising the
performance of generated solutions.
3 THE BENCHMARK PROBLEM
A benchmark problem for NAS algorithms should
have the following properties:
Rapid Evaluation: an evaluation means the
complete training of an architecture on the training
data and the measurement of the classification error
rate on test data.
Relatively Wide, Realistic Search Space: the search
space and fitness function should have properties
similar to those of hard SOTA problems.
Reproducibility of Evaluations: the fitness function
should have a low noise-to-signal ratio.
MNIST classification is an easy problem by today’s
standards. We decided to use it for benchmarking at
this early stage, because models can be trained
relatively quickly. As a starting point, we used A
Step Size Control in Evolutionary Algorithms for Neural Architecture Search
289

modernized Variant of LeNet-5 from Kaggle (Sultan,
2022) that can be fully trained on a GPU in 10-20
seconds.
It is easy to reach error rates below 1.5% on
MNIST with variants of LeNet. There are various
techniques to reduce the error rate further, like data
augmentation, dropout regularization or using
ensembles. We didn’t find these useful for a
benchmark because they increase training time.
3.1 The Fitness Function
We chose to optimize neural architectures for both
accuracy (low error rate) and small network size (low
number of trainable parameters) to make NAS on
MNIST more challenging and to reduce training times.
There are two common approaches to optimize
for two objectives: multi-objective optimization and
using a penalty function that combines multiple
objectives into a single fitness function. Multi-
objective optimization may be interesting to explore
in future research. However, this cannot be done with
an unmodified
ES.
The fitness function is:
(1)
is usually computed after training on
53,000 images for ten epochs.
is the number of free trainable
parameters in the neural network model.
The rationale is that a low error rate is more
important than minimizing parameters, so the error
rate is squared. The constants were chosen so that (i)
the fitness of A Modern Variant of Lenet-5 is near
zero (this has 62,158 parameters and an error rate of
1.25%), and (ii) halving the original number of
parameters compensates an increase in the error rate
from 1% to
.
Any fitness above zero is considered an
improvement. The best-observed fitness was 2.2.
3.2 The Grammar and Search Space
The grammar used in the experiments describes
LeNet/AlexNet/VGG-like architectures. It uses
extensions to the BNF for numeric and categorical
variables, for example
[num-filters,int,2,256]
defines an integer variable num-filters with a
range from 2 to 256, and
[act:linear/relu/elu/sigmoid]
defines a categorical variable act that can assume
four values. Boolean variables are treated like
categoricals with two values.
Here is the grammar used in the experiments:
<features> ::= <convolution>
| <pooling>
<convolution> ::= layer:conv
[num-filters,int,2,256]
[filter-shape,int,2,5]
[stride,int,1,3]
[act:linear/relu/elu/sigmoid]
[padding:same/valid]
[bias:True/False]
[batch-norm:True/False]
<pooling> ::= layer:pooling
[pooling-type:avg/max]
[kernel-size,int,2,5]
[stride,int,1,3]
[padding:same/valid]
<classification> ::= layer:fc
[act:linear/relu/elu/sigmoid]
[num-units,int,64,2048]
[bias:True/False]
[batch-norm:True/False]
<output> ::= layer:output num-units:10
bias:True
<learning> ::= <gradient-descent>
[batch_size,int,50,2048]
| <rmsprop>
[batch_size,int,50,2048]
| <adam> [batch_size,int,50,2048]
<gradient-descent> ::=
learning:gradient-descent
[lr,float,0.0001,0.1]
[momentum,float,0.68,0.99]
[nesterov:True/False]
<rmsprop> ::= learning:rmsprop
[lr,float,0.0001,0.1]
[rho,float,0.5,1]
<adam> ::= learning:adam
[lr,float,0.0001,0.1]
[beta1,float,0.5,1]
[beta2,float,0.5,1]
The symbols shown in bold are top-level symbols
corresponding to layer groups. There are 1 to 10
layers in the feature group (of type convolution or
pooling), followed by one to five layers in the
classification group. Finally, a fixed output layer of
ten units is added. A dummy layer group learning
defines the learning optimizer that applies to the
whole architecture.
An equivalent grammar was used in the
experiments with F-DENSER. We estimate the size
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
290
of the relevant search space
1
to be 10
40
combinations.
According to the overview of NAS benchmarks in
(White et al., 2023), most search spaces used for
benchmarks are much smaller.
4 THE NAS ALGORITHMS
4.1 Mutation Operators for NAS
For each generated offspring, only a few variables
and topological parameters are chosen for mutation.
The probability of mutating a variable or a layer
group is 0.15 in Stepper so that only a few parameters
(usually 2 to 5) are mutated for each new individual.
Special mutation operators are applied to layers in
the features and classification groups. For each of the
following operators, a layer group is selected, and
then a layer in it is chosen at random.
Copy Layer: a layer is copied and inserted at a
random position in the layer group.
Add Layer: a new layer with random type and
parameters is created and inserted at a random
position in the layer group.
Remove Layer: a layer is deleted from the group.
Change Layer Type: the type of a layer is changed;
all its parameters are randomly reset.
If a mutation would violate the minimum or
maximum constraint of layers per group, another
mutation operator is randomly chosen instead. The
number of layer mutations in a group is chosen
randomly so that at least one mutation is applied, two
mutations are relatively common, and three happen
occasionally.
Individuals had, on average, about five layers and
four variables per layer. This results in about 0.75
layer mutations and three variable mutations per
offspring generated.
When mutations result in an invalid individual
(e.g., Keras error), offspring generation will start
over.
4.2 Mutation Step Size Control
This work introduces algorithmic control of the
mutation step size to NAS. Step size control is widely
used in ES. ES is usually applied to search spaces
where all parameters are real-valued. However, most
parameters describing neural architecture are
integers, categorical values, or layer architecture
parameters. In the experiments, the architectures had
about ten integers, 14 categorical and two real-valued
parameters (the exact number depends on the number
and type of layers). Real value calculations can be
adapted to integers by rounding the result. This
approach was followed by (Loshchilov & Hutter,
2016), where step size control in the form of CMA-
ES was extended to integer parameters but only to
those with a large range.
Table 1 shows the mutation operators of the Stepper
algorithms in comparison to F-DENSER.
is the
algorithmically controlled step size, which is
associated with a generation for Stepper-Decay and
with an individual in Stepper-Adaptive.
is a
Gaussian-distributed random variable with a mean
and standard deviation , and the range of a mutable
variable is max min.
Special care must be taken if a mutated numerical
value falls outside the allowed interval. If values were
simply clipped to the interval, this would introduce an
additional bias into the distribution. To minimize this
bias, the interval transformation described in (Li et
al., 2013) is used. Intuitively, it reflects values outside
of the interval back into the interval.
4.3 Initialization of Individuals
The number of feature layers is chosen at random to
be two, three, or four, followed by one classification
layer. The layer type is chosen at random, and the
layer is initialized with random values within the
parameter’s ranges. The same applies to the learning
pseudo-layer.
Table 1: Mutation operators in F-DENSER and the Stepper Algorithms. is the algorithmically controlled step size, and
Range max min is the range of a mutable variable.
Type of mutation
F-DENSER
Stepper-Decay and Stepper-Adaptive
copy layer, remove layer
fixed probability
fixed probability
add layer, change layer type
fixed probability
probability proportional to
Floating point
add
Range
add
Range
Integer
random resetting
Add
Range+1
Categorical value
random resetting
random resetting
1
Assuming 1000 significant discrete values for
continuous values, and a maximum of 3 convolutional, 3
pooling and 2 fully connected layers. A larger number of
layers was almost never reached during searches.
Step Size Control in Evolutionary Algorithms for Neural Architecture Search
291
5 EXPERIMENTAL SETUP
5.1 MNIST Dataset
MNIST consists of 60,000 grey level
pictures in the training set and 10,000 in the test set.
The training set is triple split into 53,000 training (for
training architectures), 3,500 validation (to calculate
the loss during training) and 3,500 test samples (for
calculating the error rate of a trained model). The
10,000 test set is only used to calculate the final error
rate for the results of the NAS search.
Preliminary NAS searches were run with ten and
30 training epochs. We observed no significant
difference in the behavior; even the final error rate
was similar. Ten training epochs were used in the
experiments to minimize computation time.
5.2 Implementation
The Python code of this work started with the F-
DENSER code. The main author rewrote most of it
and added the collection of more statistics, caching of
results, and recording of the evolutionary history
6
.
Experiments were run with Keras/TensorFlow on
an NVIDIA GeForce RTX 2070 Super from 2019.
5.3 Benchmark Experiments
All NAS algorithms use a
ES for 200
generations, so one run evaluates 1,000 architectures.
F-DENSER is used as a baseline, with the
modification that batch normalization is applied after
the activation function. The original paper about
batch normalization proposed this (Ioffe & Szegedy,
2015), and it appears to be more effective.
For comparison, a Random Search is run. It’s
limited to five feature layers and one classification
layer because nearly all best-performing architectures
were observed in this subspace.
5.4 Experiment 1: Stepper-Decay
As a simple way of controlling a global step size, we
introduce the Stepper-Decay algorithm, which
reduces the step size over time. The rationale is that
NAS should initially explore large sections of the
search space and be able to jump out of a local
optimum; later, when it has found a reasonably good
solution, large steps will probably lead it away from
2
Source code and additional materials for this article
are available on https://github.com/ChristianNieber/
nas_on_cnns
the (local) optimum, while small steps can bring it
closer to it.
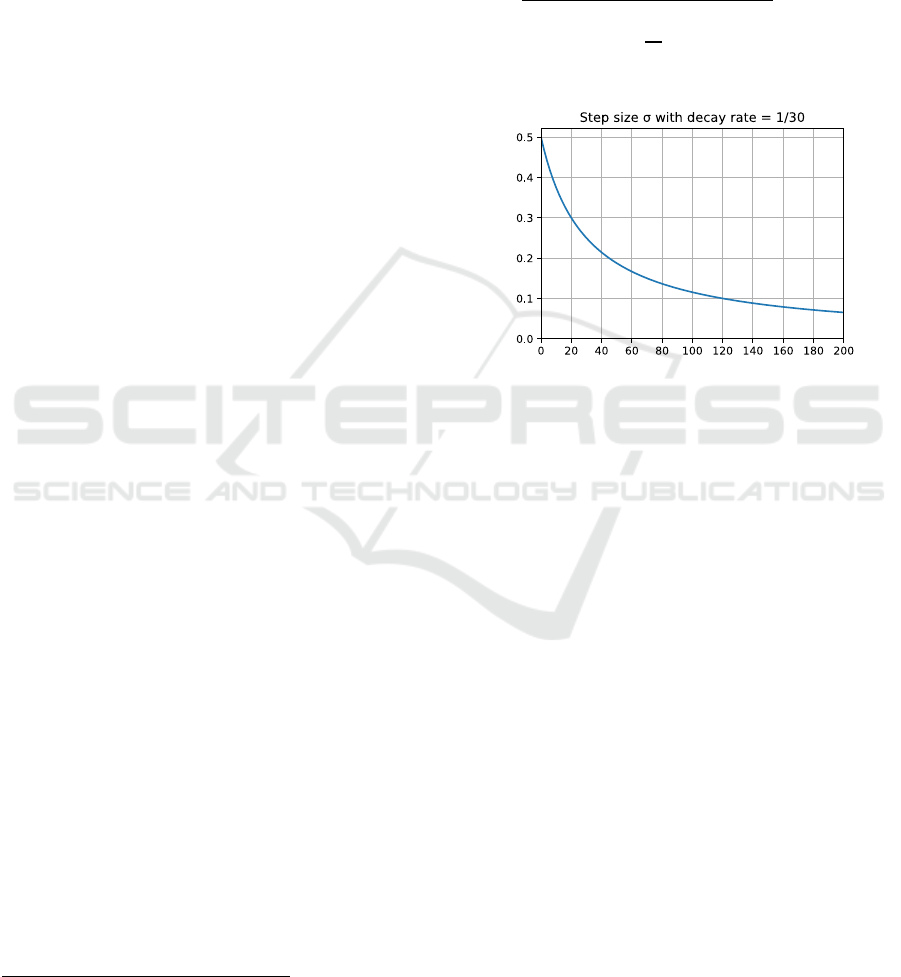
is the standard deviation of a normal distribution of
random values that generate the mutation steps.
starts at 0.5 in the first generation and decays to
in the 200th generation. The decay function (shown
in Figure 1) is:
(2)
where
, which was determined in a
few experiments.
Figure 1: Decay of the step size over generations in the
Stepper-Decay experiment.
The mutation operations add layer and change
layer type that randomly reset parameters are
subjected to an analog decay of their probabilities.
Other layer mutations and categorical values are not
affected.
5.5 Experiment 2: Stepper-Adaptive
As a more refined method of step size control, we
propose the Stepper-Adaptive algorithm, where every
individual carries its own mutation step size. This is
based on Derandomized Self-Adaptation of Evolution
Strategies (Hansen & Ostermeier, 2001; Ostermeier
et al., 1994), but modified so that only a few of the
possible variables (usually 2 to 5) are mutated to
generate each offspring.
For each offspring, a new mutation step size is
generated from the parent’s step size:
(3)
Where
is the step size or standard deviation
used to generate mutations of individual in
generation ,
is the step size associated with the
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
292
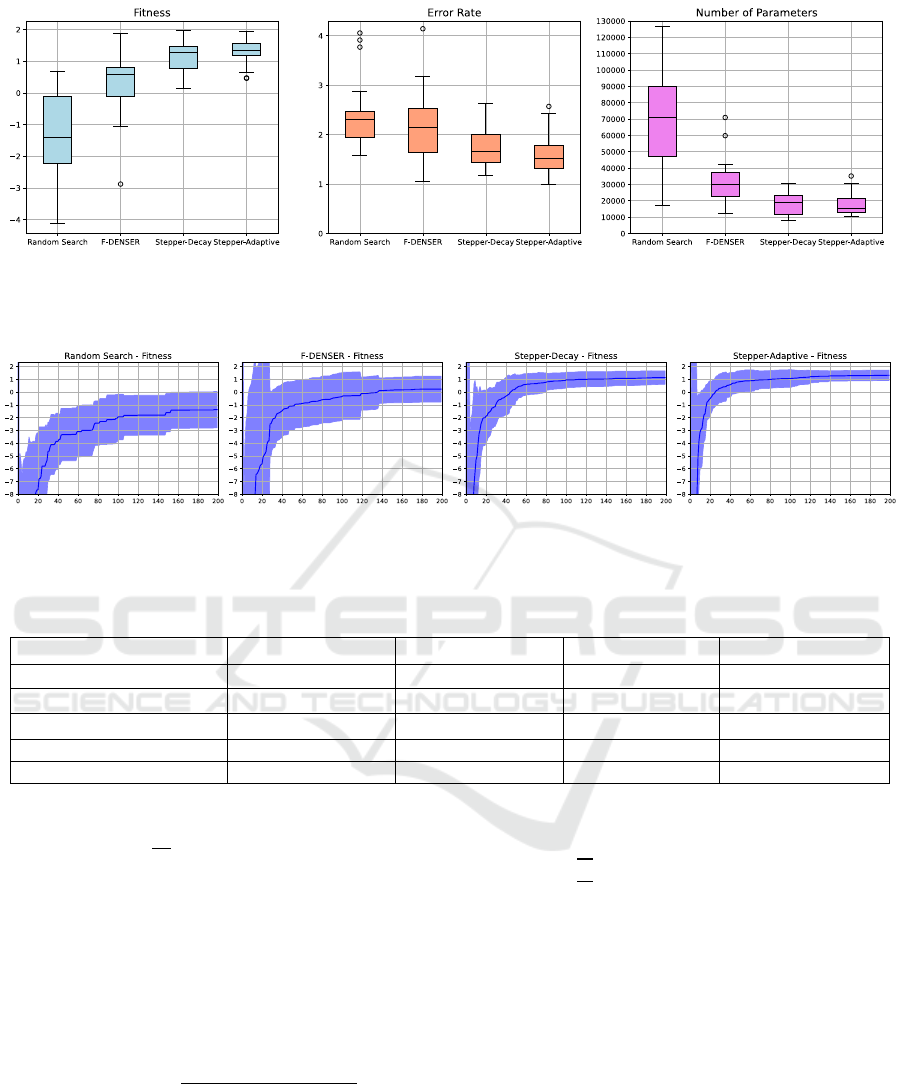
Figure 2: Box plots with the distribution of quartiles and outliers of metrics of the best (highest fitness) architecture found in
each run for 20 runs of 200 generations. The square of the error rate and the number of parameters negatively affect fitness.
0 is the fitness of an expert-optimized LeNet-like architecture, the best observed fitness was 2.2.
Figure 3: Fitness of the best individual of each generation, averaged over 20 runs of 200 generations. The darker line shows
the mean, the filled area the standard deviation.
Table 2: Mean and standard deviations of metrics of the best individuals found, summarized over 20 runs of each NAS
algorithm. The most relevant results are in bold.
Metric
Random Search
F-DENSER
Stepper-Decay
Stepper-Adaptive
Fitness
-1.38 1.42
0.23 1.02
1.13 0.52
1.31 0.41
Final test fitness
-1.38 1.35
-0.06 1.06
1.00 0.59
1.13 0.58
Error rate
2.41 0. 71
2.17 0. 75
1.78 0.45
1.59 0.39
Final test error rate
2.41 0.67
2.41 0.79
1.92 0.48
1.79 0.44
Number of parameters
73,669 37,066
31,690 14,663
7,287
parent of generation , and is a random variable
distributed as
with a probability of 0.5 each.
Then, the variable values chosen for mutation for the
new individual are generated with the step size
.
If an individual is selected as a new parent for the next
generation, the step size associated with this
individual is recalculated as the standard deviation
that has the highest likelihood of generating the step
that was taken. This is the concept of
derandomization.
(4)
where
is the vector of the random numbers used to
mutate the variables that were chosen to mutate the
individual, is the unity matrix of rank , is a
dampening factor that reduces the change rate of
the step size so that step size does not change too
randomly from one generation to the next. According
to (Ostermeier et al., 1994), should be proportional
to the square root of the number of variables. was
chosen as
, where 25 is the expected
number of numeric variables per individual and 8 is a
reduction factor.
6 RESULTS
Table 2 summarizes the metrics of the best individual
over 20 runs of each NAS algorithm. Figure 2 shows
box plots of fitness, error rate and number of
parameters. Figure 3 shows the convergence behavior
of each algorithm.
Step Size Control in Evolutionary Algorithms for Neural Architecture Search
293
7 DISCUSSION
The error rate has an observed standard deviation on
k-folds of ~ , resulting in a standard deviation
of the fitness of ~ 0.
A
ES only selects individuals as new
parents that have better fitness than the previous best.
Because of this noise in the measurement, selected
individuals are often those that “got lucky” and have
a fitness significantly above the mean k-folds fitness
of the architecture. This appears to strongly influence
the behavior of the search.
To check for statistical significance in a pair-wise
comparison of the algorithms, we used a one-sided
Mann-Whitney U test on the 20 fitness values from
the 20 runs. For Stepper-Decay vs. F-DENSER, this
found p = 0.000813, for Stepper-Adaptive vs. F-
DENSER p = 0.000052. Since p < 0.05, they perform
significantly better than F-DENSER. Stepper-
Adaptive is not significantly better than Stepper-
Decay (p = 0.130808).
Stepper-Decay and Stepper-Adaptive converge
faster than F-DENSER, find better average solutions,
and have a lower variance.
All algorithms find architectures with a similar
error rate to LeNet-5 and with less than a quarter of
the free parameters.
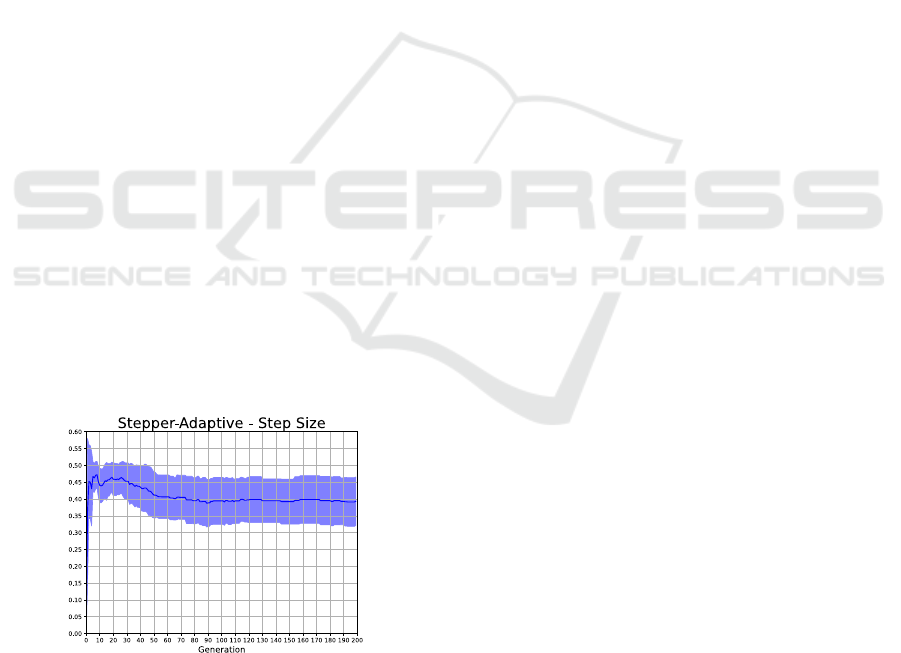
Figure 4 shows the evolution of the step size in
Stepper-Adaptive. After initial adaptations, the
average step size hovers near 0.4. If the step size were
regulated effectively, it should decrease continuously
in later generations. Presumably, evolutionary
pressure keeps the step size at a compromise value,
where a larger step size would be optimal for some
variables and a lower one for others.
Figure 4: The evolution of the global step size
over 20
runs of Stepper-Adaptive is shown as the mean and standard
deviation.
8 CONCLUSIONS AND FUTURE
WORK
Compared to F-DENSER, two different simple
methods of controlling the step size resulted in faster
convergence, better average fitness, and lower
variance.
The search for architectures to classify MNIST
data is an effective way to compare the performance
of NAS algorithms operating on wide search spaces.
Twenty runs of a
ES for 200 generations
gave a good indication of the relative performance of
the algorithms, requiring 10,000 architecture
evaluations that took about 28 hours on a single GPU.
Noise caused by training data randomization and
random initialization is significant compared to the
low error rates of <1.5% that were easily reached; we
conjecture that perhaps MNIST is too easy. This
could be remedied by using a harder-to-classify
MNIST replacement like Fashion-MNIST or
Kuzushiji-MNIST, where error rates are generally
higher, so noise is less significant.
The methods of step size control studied here are
rather crude for three reasons. First, a global step size
is unlikely to be adequate for all numeric parameters.
Secondly, step size control currently does not apply
to categorical parameters, which in the studied
problem represent about half the parameters of an
architecture. The third point applies to Stepper-
Adaptive. The step size is only adapted when a new
individual is selected as a parent, which happens quite
rarely in a
ES. So, the algorithm cannot
learn from the > of non-selected individuals and
ignores most of the available information about the
search space.
In principle, these kinds of step size control can
be applied to any problem where solution candidates
are described by a grammar-conforming expression
containing numerical values. This research could be
useful in other domains that have this kind of
optimization problem, like Operations Research.
Future work will go into two separate directions:
(i) perform experiments with a wider set of
benchmarks and datasets and more complex
architectures (e.g., including skip connections), and
compare it to the best applicable published methods.
(ii) explore how step size can be adapted in a more
fine-grained way, with separate step size for single
parameters or groups of parameters, and how it can
be changed based on more of the existing knowledge
about the search space.
The smallest architecture found in the
experiments had 5,450 trainable parameters and
reached an accuracy of 98.8% on MNIST. It
ECTA 2024 - 16th International Conference on Evolutionary Computation Theory and Applications
294

contained an unusual stack of three convolutional
filter layers that use ELU, linear and linear activation
functions, and only one fully connected classification
layer. This example suggests that a NAS working on
a wider search space can find interesting designs that
the experimenters had not considered before.
There is a large potential for future improvement
by exploring variations of step size control and
mutation operators. This is a step towards more
general and more efficient NAS methods. If NAS can
be improved further and applied to even wider search
spaces, perhaps in the future, it can find surprising
new architectural improvements.
REFERENCES
Assunção, F., Lourenço, N., Machado, P., & Ribeiro, B.
(2017). Towards the evolution of multi-layered neural
networks: A dynamic structured grammatical evolution
approach. 393–400. https://doi.org/10.1145/
3071178.3071286
Assunção, F., Lourenço, N., Machado, P., & Ribeiro, B.
(2018). Evolving the Topology of Large Scale Deep
Neural Networks (pp. 19–34).
https://link.springer.com/chapter/10.1007/978-3-319-
77553-1_2
Assunção, F., Lourenço, N., Machado, P., & Ribeiro, B.
(2019). Fast DENSER: Efficient Deep NeuroEvolution.
In Lecture Notes in Computer Science (pp. 197–212).
Springer International Publishing.
https://dx.doi.org/10.1007/978-3-030-16670-0_13
Cramer, N. L. (1985). A Representation for the Adaptive
Generation of Simple Sequential Programs. In
Proceedings of the First International Conference on
Genetic Algorithms and their Applications. Psychology
Press.
Droste, S., & Wiesmann, D. (2000). Metric Based
Evolutionary Algorithms. 29–43.
Hansen, N., & Ostermeier, A. (2001). Completely
Derandomized Self-Adaptation in Evolution Strategies.
Evolutionary Computation, 9(2), 159–195.
https://doi.org/10.1162/106365601750190398
Holland, J. H. (1992). Adaptation in Natural and Artificial
Systems: An Introductory Analysis with Applications to
Biology, Control, and Artificial Intelligence. The MIT
Press. https://direct.mit.edu/books/book/2574/
Adaptation-in-Natural-and-Artificial-SystemsAn
Ioffe, S., & Szegedy, C. (2015). Batch Normalization:
Accelerating Deep Network Training by Reducing
Internal Covariate Shift. arXiv Pre-Print Server.
https://arxiv.org/abs/1502.03167
Koza, J. R. (1989). Hierarchical genetic algorithms
operating on populations of computer programs.
Proceedings of the 11th International Joint Conference
on Artificial Intelligence - Volume 1, 768–774.
Li, R., Emmerich, M., Eggermont, J., Bäck, T., Schütz, M.,
Dijkstra, J., & Reiber, J. (2013). Mixed Integer
Evolution Strategies for Parameter Optimization.
Evolutionary Computation.
https://doi.org/10.1162/EVCO_a_00059
Loshchilov, I., & Hutter, F. (2016). CMA-ES for
Hyperparameter Optimization of Deep Neural
Networks.
Loshchilov, I., Schoenauer, M., & Sèbag, M. (2013). Bi-
population CMA-ES agorithms with surrogate models
and line searches. Proceedings of the 15th Annual
Conference Companion on Genetic and Evolutionary
Computation, 1177–1184.
https://doi.org/10.1145/2464576.2482696
Ostermeier, A., Gawelczyk, A., & Hansen, N. (1994). A
derandomized approach to self-adaptation of evolution
strategies. Evolutionary Computation, 2(4), 369–380.
Rechenberg, I. (1965). Cybernetic solution path of an
experimental problem. Roy. Aircr. Establ., Libr.
Transl., 1122. https://cir.nii.ac.jp/crid/
1570291225013966592
Rechenberg, I. (1994). Evolutionsstrategie. Frommann-
Holzboog.
Ryan, C., Collins, J., & Neill, M. O. (1998). Grammatical
evolution: Evolving programs for an arbitrary language.
In W. Banzhaf, R. Poli, M. Schoenauer, & T. C. Fogarty
(Eds.), Genetic Programming (pp. 83–96). Springer.
https://doi.org/10.1007/BFb0055930
Schwefel, H.-P. (1995). Evolution and optimum seeking.
Sixth-generation computer technology series.
Storn, R., & Price, K. (1997). Differential evolution–a
simple and efficient heuristic for global optimization
over continuous spaces. Journal of Global
Optimization, 11(4), 341–359.
https://doi.org/10.1023/A:1008202821328
Sultan, A. (2022). A Modern Variant of LeNet by TF.keras
on MNIST. https://www.kaggle.com/code/abedsultan/
a-modern-variant-of-lenet-by-tf-keras-on-mnist
White, C., Safari, M., Sukthanker, R., Ru, B., Elsken, T.,
Zela, A., Dey, D., & Hutter, F. (2023). Neural
Architecture Search: Insights from 1000 Papers
(arXiv:2301.08727). arXiv. https://doi.org/10.48550/
arXiv.2301.08727
Yang, A., Esperança, P., & Carlucci, F. (2019). NAS
evaluation is frustratingly hard.
Yu, K., Suito, C., Jaggi, M., Musat, C.-C., & Salzmann, M.
(Eds.). (2020). Evaluating the search phase of neural
architecture search. ICRL 2020 Eighth International
Conference on Learning Representations.
Step Size Control in Evolutionary Algorithms for Neural Architecture Search
295
