
Data-Driven Predictive Maintenance for Component Life-Cycle
Extension
Margarida Moreira
1 a
, Eliseu Pereira
1,2 b
and Gil Gonc¸alves
1,2 c
1
Faculty of Engineering, University of Porto, Portugal
2
SYSTEC-ARISE, Faculty of Engineering, University of Porto, Portugal
Keywords:
Predictive Maintenance, Industry 4.0, Remaining Useful Life (RUL), Data-Driven Methods, Survival
Analysis.
Abstract:
In the era of Industry 4.0, predictive maintenance is crucial for optimizing operational efficiency and reducing
downtime. Traditional maintenance strategies often cost more and are less reliable, making advanced pre-
dictive models appealing. This paper assesses the effectiveness of different survival analysis models, such as
Cox Proportional Hazards, Random Survival Forests (RSF), Gradient Boosting Survival Analysis (GBSA),
and Survival Support Vector Machines (FS-SVM), in predicting equipment failures. The models were tested
on datasets from Gorenje and Microsoft Azure, achieving C-index values on test data such as 0.792 on the
Cox Model, 0.601 using RSF, 0.579 using the GBSA model and 0.514 when using the FS-SVM model. These
results demonstrate the models’ potential for accurate failure prediction, with FS-SVM showing significant
improvement in test data compared to its training performance. This study provides a comprehensive evalua-
tion of survival analysis methods in an industrial context and develops a user-friendly dashboard for real-time
maintenance decision-making. Integrating survival analysis into Industry 4.0 frameworks can significantly en-
hance predictive maintenance strategies, paving the way for more efficient and reliable industrial operations.
1 INTRODUCTION
In the industrial setting, maintaining system compo-
nents is a critical yet challenging aspect of operations
management. Traditional maintenance approaches,
often reactive or time-based, have limitations in terms
of cost efficiency and operational effectiveness. With
the advancement of Industry 4.0 development, the in-
tegration of digital technologies into manufacturing
processes has revolutionized maintenance strategies,
making predictive maintenance not just beneficial but
essential. Predictive maintenance utilizes advanced
data analytics and machine learning to predict com-
ponent failures before they occur, allowing for timely
and cost-effective interventions.
Traditional maintenance methods, such as reactive
maintenance and preventive maintenance, often re-
sult in inefficiencies. Reactive maintenance can lead
to unexpected downtime and high repair costs, while
preventive maintenance may cause over-maintenance
a
https://orcid.org/0009-0000-7290-6467
b
https://orcid.org/0000-0003-3893-3845
c
https://orcid.org/0000-0001-7757-7308
and unnecessary expenses. Although there are some
attempts in this area (Rossini et al., 2021), there is a
critical need for predictive maintenance models that
can optimize maintenance schedules, reduce costs,
and improve equipment uptime.
This work focuses on implementing and evalu-
ating various predictive maintenance models using
survival analysis techniques. The methods include
Cox Proportional Hazards, Random Survival Forest
(RSF), Gradient Boosting Survival Analysis (GBSA),
and Survival Support Vector Machines (FS-SVM).
The data used for this analysis comes from two
sources: a dataset from Gorenje company related to
a spot welding robot and a Microsoft Azure predic-
tive maintenance dataset from Kaggle. It will show
the preprocessing of data ingested, the training and
evaluation of different survival analysis models and a
simulation of a maintenance scenario.
The work presented in this paper aims to provide a
comprehensive evaluation of predictive maintenance
models based on survival analysis and their integra-
tion within an Industry 4.0 framework.
This paper is organised as follows: Section 2
presents the literature review. Section 3 presents the
126
Moreira, M., Pereira, E. and Gonçalves, G.
Data-Driven Predictive Maintenance for Component Life-Cycle Extension.
DOI: 10.5220/0013014200003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 126-136
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
system’s architecture implementation. Section 4 dis-
cusses the main results obtained after the implementa-
tion. Finally, Section 5 provides the conclusions and
future work that can still be done.
2 LITERATURE REVIEW
The following literature review summarises Industry
4.0 and the different types of industrial maintenance
that are used, the different predictive maintenance
models, survival analysis and its performance metrics
and in the end, the concept of data preparation and
feature engineering and ends with the presentation of
different data-driven methods. It concludes with a
summary of the primary findings from the reviewed
studies.
2.1 Types of Industrial Maintenance
Predictive Maintenance (PdM) has been increasing in
popularity in the last few years, mainly in Industry
4.0. It is estimated that ”The impact of maintenance
represents a total of 15 to 60% of the total costs of
operating of all manufacturing” (Zonta et al., 2020).
Nowadays, the three main types of industrial
maintenance are reactive maintenance, preventive
maintenance, and predictive maintenance.
Reactive maintenance is characterized by re-
sponding to equipment failures, in other words, with-
out prior planning. Preventive maintenance refers to
activities performed on a fixed schedule, normally in
regular intervals. This technique reduces the likeli-
hood of equipment failure. However, it may lead to
over-maintenance, where components are often fixed
more than necessary. This will cause an increase in
costs, which will cause the companies to lose more
than necessary.
Predictive maintenance relies on the real-time
monitoring of equipment conditions to predict when
maintenance should be performed. It uses a combi-
nation of data analysis, machine learning, and sen-
sor technologies to indicate potential failures before
they happen. The main goal is to optimize mainte-
nance frequency, reduce costs, and increase equip-
ment uptime. It predicts and prevents component fail-
ures. It has been widely adopted due to its superior
results compared to the previously mentioned tech-
niques (Moat and Coleman, 2021).
In the last years, a new kind of maintenance has
been developed. This type, called proactive main-
tenance, is considered the latest type in this evolu-
tion process. It consists of identifying the source
of the fault and remediating conditions that can fail
(Ramezani et al., 2023).
2.2 Predictive Maintenance Models
There are three main models, as presented below:
• Condition-Based Maintenance (CBM)
• Prognostics and Health Management (PHM)
• Remaining Useful Life (RUL)
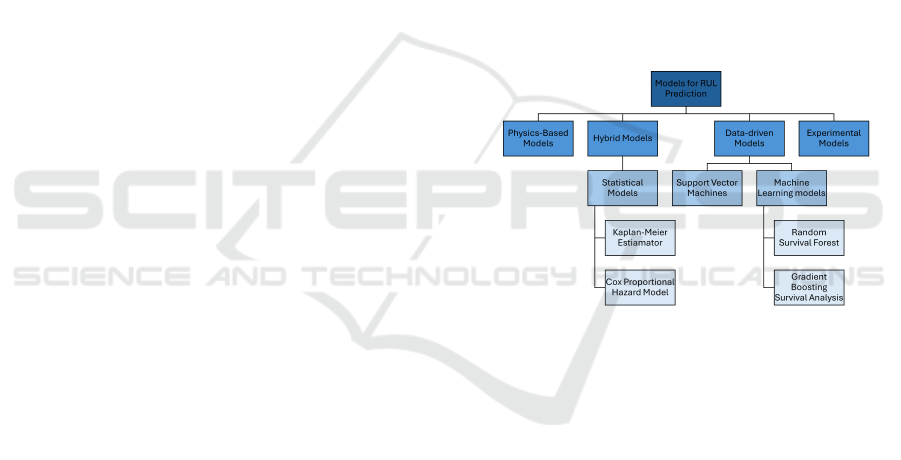
The main focus of this article will be on the Re-
maining Useful Life (RUL) strategy. RUL refers to
the estimated lifespan of a device before it requires
maintenance or replacement and also the remaining
time until the equipment’s health conditions reach the
failure threshold (Gupta et al., 2024). The accuracy of
the RUL estimation depends on the quality and quan-
tity of available health monitoring data and the meth-
ods used for such analysis (Ferreira and Gonc¸alves,
2022).
s
Figure 1: Models for RUL prediction, based on (Achouch
et al., 2022).
RUL uses different models for its prediction-
making, as shown in figure 1.
2.3 Survival Analysis
Survival analysis encompasses various methods for
analyzing data related to time-to-event outcomes. It
is also comprehended as a reliability theory and an
event history analysis. The term ‘survival’ is equiva-
lent to probabilities in survival analysis, implying that
survival can be ‘measured’. The survival function can
be expressed as (Moat and Coleman, 2021):
S(t) = P(T > t) = 1 − F(t) (1)
Where S(t) is the survival function representing
the probability that a system or component survives
beyond a certain time t. The T is the number of cy-
cles until the component is worn out. The whole func-
tion describes the probability that the component is
not worn out by t cycles.
Data-Driven Predictive Maintenance for Component Life-Cycle Extension
127

The survival function present on 1 can be esti-
mated using the Kaplan-Meier Estimator (KM). It is a
non-parametric estimator used to measure the fraction
of living subjects after a certain amount of time with
respect to one or more specific events (Yang et al.,
2022). It is defined as:
ˆ
S(t) =
∏
t
i
≤t
1 −
d
i
n
i
(2)
In the equation 2 (Frumosu et al., 2020), the t
i
is
the time when at least one event (worn-out) occurred,
the d
i
is the total number of events (worn-out) at t
number of shots and n
i
is the number of components
at risk at t number of shots.
The Kaplan-Meier survival curve starts from 1
when all components work correctly and decreases to
0 as events (worn-outs) occur.
To evaluate and compare the performance of sur-
vival analysis models, the scikit-survival module from
Python can be used, which offers comprehensive tools
and metrics tailored for survival data. The bigger dif-
ference between survival analysis and traditional ma-
chine learning is the fact that parts of the training
data can only be partially observed. (P
¨
olsterl, 2024).
Consequently, the performance metrics used are the
Concordance index (C-index), Brier Score, integrated
Brier score and Time-Dependent ROC.
2.4 Performance Metrics
Performance metrics are used to evaluate and estimate
the survival models. Some of the most common in-
clude the Concordance Index (C-index), Brier Score
and the integrated Brier score (IBS) (Zeng et al.,
2023).
The C-index, also called Harrell’s Index (Frumosu
et al., 2020), is one of the most common evaluation
metrics used for measuring the quality and efficiency
of survival models. It ranges from 0 to 1, where re-
sults closer to 1 indicate a better performance of the
model (De Santis et al., 2022).
The Brier score measures the difference between
the predicted probability and the true outcome, with
higher scores (Shen et al., 2024). The Brier score
ranges from 0 to 1, and contrarily to C-index, 0 in-
dicates a perfect prediction while 1 indicates poorer
prediction accuracy and calibration.
The IBS extends the Brier score to the context of
time-to-event data, such as survival analysis. It re-
flects calibration over all time points, with a smaller
value indicating greater accuracy. Like the Brier
score, a smaller value indicates a greater accuracy
(Tran et al., 2023).
2.5 Data Preparation and Feature
Engineering
The dataset is usually chosen based on the data col-
lected by the sensors, more precisely, temperature,
voltage, pressure, votation, and vibration, among oth-
ers.
Normally, two different datasets are used for test-
ing, one real and another one already used in other
works, to compare the results.
The dataset that would be chosen to be compared
with the real one should contain a large number of
points in order to have more accurate results.
The first step normally consists of the removal
of low-coverage parameters, replacing missing values
with the median in order to maintain data integrity,
removing non-numerical parameters, and eliminating
non-numeric features that are not useful for analysis.
Following that, the aggregation process begins by
summarizing and consolidating the data. Following
that, the feature selection is realized, which starts by
first summarising and consolidating the data and then
proceeding with the selection of relevant features and
removal of redundant ones.
The use of multiple datasets allows for the valida-
tion of the models that are being tested and, conse-
quently, the generalization of the results. It also al-
lows us to compare the efficiency of predictive main-
tenance tools against established benchmarks. Fi-
nally, the comparative dataset can help interpret re-
sults from the real dataset and vice-versa.
When these processes have been concluded, some
data transformation is performed, where the normal-
ization of the features occurs.
To end this procedure, the data is normally split
into training and testing to posteriorly evaluate the
model’s performance.
Feature engineering is a technique that creates
new features based on the existing ones from the
dataset (Zhou et al., 2022). Some of the most com-
mon techniques are feature creation and feature ex-
traction. Feature creation involves generating new
ones by creating new variables used in the machine
learning models (Madasamy et al., 2023). Feature ex-
traction is based on extracting the most relevant fea-
tures from a raw data sample used as input to the
models. The most common domains to be used to
extract these variables are time, frequency and time-
frequency (Gupta et al., 2024).
2.6 Data-Driven Methods
To predict the behaviour of the machines and deter-
mine when an intervention should be conducted to re-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
128
store some components, it is necessary to evaluate and
analyze the available data from the sensors.
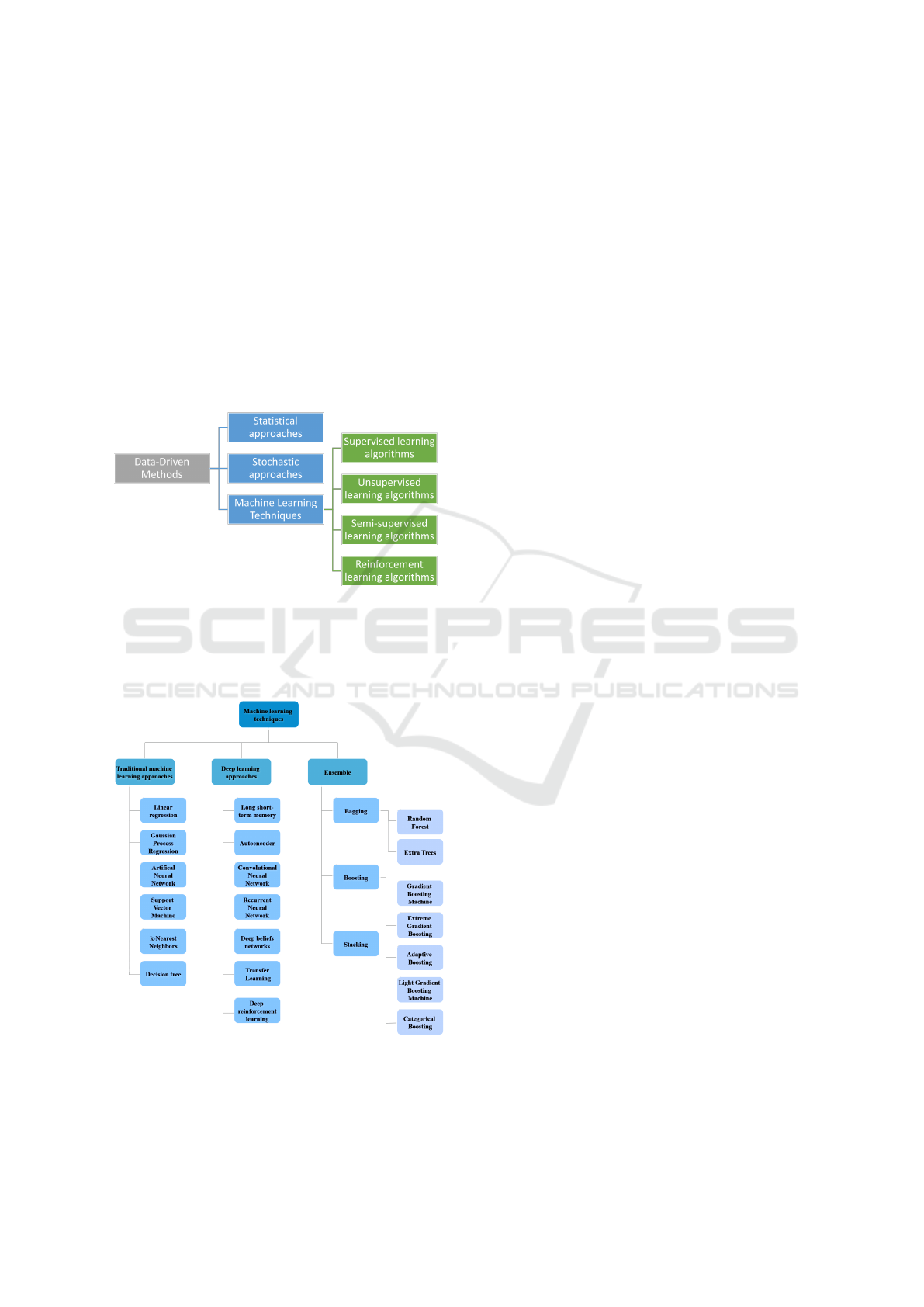
There are three main types of data-driven meth-
ods, as shown below (Arena et al., 2021):
1. Statistical approaches;
2. Stochastic approaches;
3. Machine Learning Techniques.
The first two methodologies are best suited for
examining complex systems whose evolutionary pro-
cesses are not straightforward to anticipate.
The third one is the approach that will be consid-
ered in this work.
This can be summarised in the following figure 2.
Figure 2: Types of data-driven methods and the fourth main
machine learning methodologies.
Regarding machine learning algorithms, they are
divided into three main categories, as shown in Figure
3:
Figure 3: Machine learning algorithms divided into the
three main categories.
The first technique involves using simpler algo-
rithms that are more easily interpreted.
The second one uses multilayered artificial neu-
ral networks to create a more suitable mapping func-
tion between given inputs and outputs. It normally
requires a large amount of data to achieve better ac-
curacy.
Ensemble learning methods involve combining
two or more ML algorithms to achieve better perfor-
mance than when using the individual algorithms sep-
arately. Instead of depending on a single model, the
predictions from the individual algorithms are com-
bined using a specific rule to produce a more accu-
rate single prediction. Ensemble methods are typi-
cally categorized into parallel (bagging) and sequen-
tial ensembles (boosting) (Mienye and Sun, 2022).
2.7 Gap Analysis
The reviewed studies present different methods and
models to predict the remaining useful life of different
components. Some of the most common approaches
are traditional machine learning techniques, and with
the development of technology, there are more studies
where deep learning methods are being developed.
Nevertheless, significant gaps prevail when using
a survival approach. When searching for articles that
used this package in Industry 4.0, the search returned
null results on Scopus. However, this technique is
widely used in the field of medicine. By leveraging
the strengths of survival analysis, industries could im-
prove their predictive maintenance strategies, leading
to more efficient operations and reduced downtime.
3 IMPLEMENTATION
In this chapter, the implementation of the Data-Driven
Predictive Maintenance system is designed to extend
the life cycle of critical components. The implemen-
tation is structured into distinct modules, each re-
sponsible for a specific aspect of the data processing
and maintenance prediction workflow. This modular
approach ensures scalability, flexibility, and ease of
maintenance.
3.1 Systems’ Architecture
The architecture of the system can be categorized into
the following modules, as shown in the Figure 4 be-
low:
Each module plays a critical role in the overall
functionality of the predictive maintenance system.
Figure 1 illustrates the interaction between these mod-
ules and their respective components.
Data-Driven Predictive Maintenance for Component Life-Cycle Extension
129

Figure 4: Systems’ Architecture Overview.
The data acquisition module is responsible for col-
lecting and ingesting raw data from various sensors
and data sources. This data forms the backbone of the
predictive maintenance system, providing the neces-
sary inputs for subsequent analysis and modelling.
Once the data is ingested, it undergoes prepro-
cessing to clean, normalize, and transform it into a
suitable format for analysis on the data preprocess-
ing module. This module includes feature engineer-
ing processes that extract meaningful features from
raw data, enhancing the accuracy and efficiency of the
predictive models.
In the predictive model module, machine learning
algorithms are employed to predict the degradation
of components. These predictions help prevent unex-
pected failures and extend the component life cycle.
The maintenance module interprets the predic-
tions and provides actionable insights for mainte-
nance planning. It generates dashboard reports that
aid in decision-making and execution of maintenance
actions. This module ensures that the right mainte-
nance activities are performed at the right time based
on data-driven insights.
For the validation of the solution, two datasets
were used: one provided by Gorenje company that
is related to component welding and another that
was taken from Kaggle, a Microsoft Azure predic-
tive maintenance dataset created for predictive main-
tenance model building, being a synthetic dataset.
For the development of the architecture, the open-
source scikit-learn package used version 1.3.2, the
scikit-survival package used version 0.22.2, the scipy
package version used version 1.10.1, and the Python
version 3.9.0.
3.2 Data Acquisition and Preprocessing
The data related to the company Gorenje were related
to a spot welding robot. It was presented in diverse
CSV files, with the minimum, mean and maximum
current from 2022-09-30 until 2023-03-08. It pre-
sented a total of 629444 samples. In another file, there
was information related to the values of a rotary ta-
ble, with a total of 96869 samples. There was also a
file that presented the time of failure when the failure
occurred, the error code number, and a total of 248
samples.
Based on these files, the first step was to merge the
sensor data with the counter data to align timestamps
correctly, using the pd.concat function, incorporating
sensor readings and counter value.
After merging the data, the difference between
successive counter values was calculated in order to
determine the machine cycles. For each cycle, statis-
tics such as the mean and standard deviation of cur-
rent sensor readings were computed. Each cycle was
then labelled as either working or resulting in a fail-
ure based on historical failure data. This labelling was
used to train predictive models.
The Microsoft Azure predictive maintenance
dataset was designed for building predictive main-
tenance models and includes various operational
metrics and sensor readings, all collected hourly.
The dataset comprises several CSV files such as
PdM telemetry.csv that contain hourly averages of
voltage, rotation, pressure, and vibration from
100 machines in 2015, totalling 876,101 sam-
ples. PdM errors.csv includes 3,920 samples of
machine errors, detailing the datetime, machineID,
and specific error. These errors occur without
causing machine shutdowns. PdM maint.csv con-
tains 3,287 samples with the datetime, machineID,
and the component that was replaced. It records
both proactive maintenance during scheduled visits
and reactive maintenance after component failures.
PdM failures.csv is a subset of the maintenance data,
showing component replacements due to failures and
PdM machines.csv provides each machine’s model
type and age. Only telemetry data from 2015 was
used in the preprocessing phase.
3.3 Predictive Models
For both Gorenje and Microsoft Azure datasets, the
preprocessed data obtained in the previous module
was used to train various survival analysis models.
First, the preprocessed data was loaded, and then rel-
evant features, including cycle time and cumulative
metrics, were selected. The dataset was divided into
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
130

a training set and a test set in order to evaluate the
performance of each model and proceed to the vali-
dation of the system. The x train contained the fea-
tures of each dataset, while the y train included the
status of the components (if they have failed) and the
time to failure for each component. After dividing the
datasets, the first step was the training phase. During
training, the model used x train (cycles) and y train
as inputs. After the model was trained, the outputs
produced were the different models and the associ-
ated c index train for each model. After completing
the training phase, the testing phase was conducted to
obtain the model predictions. It was used the x test
and y test as inputs, and the trained models produced
in the testing phase. The outputs obtained included
the predictions associated with each model (such as
the survival functions and the time to failure for the
Fast Survival Support Vector Machine), as well as the
c index test to evaluate the performance. The differ-
ent survival models that were trained and evaluated
included the Cox Proportional Hazards, Random Sur-
vival Forest, Gradient Boosting Survival Analysis and
Fast Survival Support Vector Machine.
For this, was created the training phase and, after
that, the testing phase. In the first one, the system had
as inputs the x train. After this, the models were eval-
uated using the concordance index, and survival func-
tions were plotted to visualize the estimated survival
probabilities over time. This procedure was applied
to each component individually to create this module.
After this step, the models were stored on the disk
using the dump function to be used in the maintenance
module.
3.3.1 Cox Proportional-Hazards Model
The Cox proportional hazard model (PH) is a semi-
parametric model. It is used to investigate the effect
of several variables on the time a specified event takes
to happen, and it has the following hazard function
(Moat and Coleman, 2021):
h(t, X) = h
0
(t)exp(βX) (3)
In the equation 3, h
0
(t) is the baseline hazard
function, β is the coefficient, and X is the covariate.
The Cox PH model assumes that survival times t are
independent, the hazard is proportional, i.e., the haz-
ard ratio is proportional, the hazard function is the
linear function of the numerical covariates, and the
values of X’s do not change over time.
The Algorithm 1 was implemented as follows:
3.3.2 Random Survival Forests
The Random Survival Forest is a collection of tree-
based models that ensures that each tree is built on
Data: Training data x
train
, y
train
, Test data x
test
,
y
test
Result: Trained Cox model, Feature
importance, Survival functions
Initialize: Cox Proportional Hazards model
cox model;
cox model ← CoxPHSurvivalAnalysis();
Call: TrainModel(cox model);
Print: “Feature importance:”;
Print: pd.Series(cox
model.coe f ,
index=x f eatures);
Algorithm 1: Cox Proportional Hazards Model Training.
a different bootstrap sample of the original training
data, consequently removing correlations between the
trees. At each node, only a randomly selected subset
of features and thresholds are used to evaluate the split
criterion. The final predictions are made by combin-
ing the predictions of each individual tree in the en-
semble. The following algorithm 2 demonstrates the
implementation of this model.
Data: Training data x
train
, y
train
, Test data x
test
,
y
test
Result: Trained RSF model, Concordance
index
Initialize: Random Survival Forest model rs f ;
rs f ←
RandomSurvivalForest(n estimators=100,
min samples split=10, min samples leaf=15,
max features=”sqrt”, n jobs=-1,
random state=20);
Fit the model: rsf.fit(x
train
, y
train
);
Evaluate the model using concordance
index;
cindex train ← rsf.score(x
train
, y
train
);
cindex test ← rsf.score(x
test
, y
test
);
Print: “ RSF Model ’;
Print: “cindex train: ”, round(cindex train,
3);
Print: “cindex test: ”, round(cindex test, 3);
Algorithm 2: Random Survival Forest Model Training.
3.3.3 Gradient Boosting Survival Analysis
Gradient Boosting leverages the principle of strength
in numbers by combining the predictions of multiple
base learners to create a robust overall model.
A gradient boosted model shares similarities with
a Random Survival Forest in that both rely on mul-
tiple base learners to generate an overall prediction.
However, they differ in their combination methods. A
Random Survival Forest fits several Survival Trees in-
dependently and averages their predictions, whereas
a gradient boosted model is built sequentially in a
greedy stagewise manner. The Algorithm 3 demon-
strates the implementation of this model.
Data-Driven Predictive Maintenance for Component Life-Cycle Extension
131

Data: Training data x
train
, y
train
, Test data
x
test
, y
test
Result: Trained Gradient Boosting model,
Concordance index
Initialize: Gradient Boosting Survival
Analysis model gbsa;
gbsa ← GradientBoostingSurvivalAnaly-
sis(n
estimators=100, learning rate=0.01);
Fit the model: gbsa.fit(x
train
, y
train
);
Evaluate the model using concordance
index;
cindex train ← gbsa.score(x
train
, y
train
);
cindex test ← gbsa.score(x
test
, y
test
);
Print: “Gradient Boosting Survival Analysis
Model”;
Print: “cindex train: ”, round(cindex train,
3);
Print: “cindex test: ”, round(cindex test, 3);
Algorithm 3: Gradient Boosting Survival Analysis Model
Training.
3.3.4 Survival Support Vector Machines
Survival Support Vector Machines (Survival SVM)
are an extension of traditional Support Vector Ma-
chines adapted for survival analysis. The Survival
SVM method integrates the principles of SVM into
survival analysis, aiming to find a hyperplane that
maximizes the margin between different survival
times. Unlike traditional SVM, which is used for
classification or regression, Survival SVM deals with
censored data, where the event of interest has not oc-
curred for all subjects during the observation period.
The following Algorithm 4 illustrates the implemen-
tation of this model.
3.4 Maintenance Module
This module was only applied to the second dataset
since this last one presented more features and data
samples.
Firstly, a simulation was created where the dif-
ferent models produced in each component would be
called using the load() function. In this simulation, a
machine class was created to simulate a machine with
multiple components that may fail and need replace-
ment. Inside this class, diverse methods were created,
such as:
• log event: that logs significant events, such as
component failures and repairs, for debugging and
record-keeping, including timestamps and costs
associated with the maintenance of the compo-
nents;
Data: Training data x
train
, y
train
, Test data
x
test
, y
test
Result: Trained FS-SVM model,
Concordance index
Procedure: TrainSVM();
Initialize: Fast Survival SVM model
svm model;
svm
model ←
FastSurvivalSVM(rank ratio=0.0,
max iter=1000, tol=1e-5, random state=42);
Print: “FS-SVM Model”;
Fit the model: svm model.fit(x
train
, y
train
);
Evaluate the model using concordance
index;
cindex train ←
concordance index censored(y
train
[
′
status
′
],
y
train
[
′
tt f comp1
′
],
-svm model.predict(x
train
));
Print: “cindex train: ”,
round(cindex train[0], 3);
cindex test ←
concordance index censored(y
test
[
′
status
′
],
y
test
[
′
tt f comp1
′
],
-svm model.predict(x
test
));
Print: “cindex test: ”, round(cindex test[0],
3);
Return: svm model, cindex train,
cindex test;
Algorithm 4: Fast Survival SVM Model Training.
• predict time to failure: where is specified the
model to predict the remaining useful life of a
component based on its features;
• run machine: It simulates the machine operation
and decrements the remaining life of components,
checks for failures, and starts repairs when neces-
sary. It also checks component lifetimes at the end
of each simulated day;
• log remaining times: It logs the remaining times
for all components at regular intervals for moni-
toring purposes;
• update remaining times: Regularly updates the
remaining times of components every 8 hours;
• start repair: Manages the repair process of a failed
component, including scheduling repairs within
working hours and handling repair costs;
• complete repair: Completes the repair of a com-
ponent and updates its predicted remaining life.
In this simulation, a cost of 40 C per repair of the
component was also added, and 40C was referred to
as the displacement of the repairmen. It was also
added some restrictions, such as the repayment only
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
132
does the maintenance of the components from Mon-
day to Friday, from 08:00 to 17:00. Also, the first
component takes four hours to be repaired, and the
subsequent on that day takes only one hour.
After the simulation was performed, a dashboard
was created with the support of Streamlit. This Dash-
board first opens a webpage where the people can se-
lect a date and time between 01/01/2015 06:00 and
01/01/2016 06:00. The person can also choose the
time of simulation he wants to produce. This time
is referred to as the weeks. After the person presses
the button of the simulation, a report with the total
cost associated with the repairs and displacement is
demonstrated, as well as the start and end date of the
simulation. It then shows a table with the repair log of
each component, the time it started being repaired and
the model that was used to predict the failure. It ends
with showing graphs, one with the remaining time of
each component during the weeks simulated and an-
other with the failures of each component.
4 EXPERIMENTS AND RESULTS
The results can be divided between the performance
of each model for each dataset and the dashboard cre-
ated with the help of the Streamlit application.
4.1 Predictive Models Performance
The first results were obtained after the training of the
different models. The results were evaluated using the
C-Index for training and for test samples.
The initial findings were performed on Gorenje’s
dataset and can be observed in the table 1.
Table 1: Evaluation of the different models trained using
C-index performance measure for the Gorenje’s dataset.
Model Cox
Model
RSF GBSA FS-
SVM
C-index
train
0.763 0.897 0.789 0.722
C-index
test
0.974 0.791 0.789 0.865
The Cox Model was observed to perform prop-
erly on the training data (0.763), but it performed ex-
ceptionally well on the test data (0.974). This unusu-
ally high test c-index compared to the training c-index
might indicate potential overfitting. Generally, the
test performance is expected to be slightly lower or
comparable to the training performance.
RSF shows high performance on the training data
(0.897), suggesting it has learned it well. However,
its performance drops on the test data (0.791), main-
taining a good level of predictive accuracy on the test
data.
The GBSA model shows consistent performance
on both training and test datasets with identical c-
index values (0.789). This consistency suggests that
the model generalizes well and has neither overfitted
nor underfitted the data.
FS-SVM has the lowest performance on the train-
ing data (0.722) but performs significantly better on
the test data (0.865). This improvement could imply
that the model is better suited to the distribution of the
test data.
When testing for Microsoft Azure’s dataset, the
performance was evaluated for each component of
machine 1. The results are represented in table 2.
Based on the results, it can be confirmed that the
CoxPH Model presents a pattern of overfitting across
all components, with test c-index values significantly
higher than training c-index values. On the other
hand, the RSF model represents a good generalization
on components one and four, but components two and
three present a big drop between the train and test c-
index, which may suggest an overfitting. The GBSA
model presents a consistent performance for compo-
nents one, two and four and component three shows a
moderate drop in test performance, suggesting some
overfitting. In the end, FS-SVM does present a con-
sistent performance for components three and four, al-
though the results are not that high.
4.1.1 Simulation and Dashboard Report
When simulating, based on the results of the c-index
values, the models for each component were chosen.
The models chosen were:
• model choice comp1 = ’rsf’
• model choice comp2 = ’gbsa’
• model choice comp3 = ’svm’
• model choice comp4 = ’svm’
These models could be changed in the simulation
script.
With the created interface, the person can choose
the date and the weeks they want to simulate, accord-
ing to the rules mentioned in section 3.4. For the fol-
lowing results, the data chosen was 2015/01/05 06:00,
and the time for simulation was 5 weeks. The first
ones to acknowledge are the simulation report and the
repair log, present in the figure 5.
Data-Driven Predictive Maintenance for Component Life-Cycle Extension
133
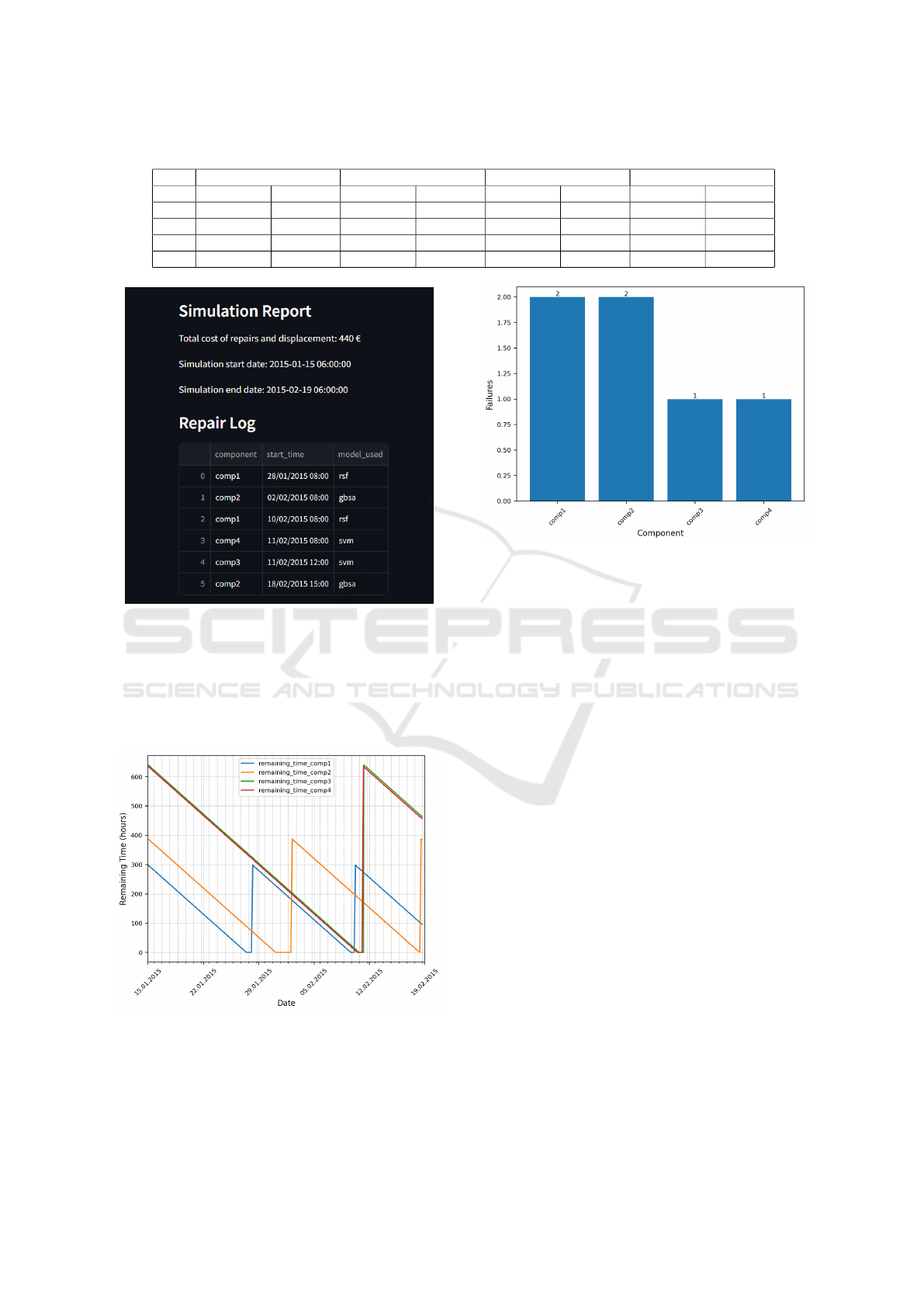
Table 2: Evaluation of for the different models trained using C-index performance measure, for the Microsoft Azure’s dataset.
CoxPH RSF GBSA FS-SVM
C-index train C-index test C-index train C-index test C-index train C-index test C-index train C-index test
Comp1 0.531 0.926 0.709 0.689 0.627 0.645 0.510 0.553
Comp2 0.518 0.858 0.702 0.387 0.627 0.509 0.516 0.544
Comp3 0.480 0.649 0.751 0.458 0.722 0.543 0.511 0.496
Comp4 0.518 0.792 0.687 0.601 0.602 0.579 0.507 0.514
Figure 5: Simulation Report and Repair Log for the simu-
lated dates.
After the report, the following charts were pre-
sented. In figure 6, it can be seen on the line chart
the remaining time of each component. In figure 7, it
is presented with the help of a bar chart, the times that
a component failed during the simulated time.
Figure 6: Remaining time for each component.
Overall, the analysis of the predictive models’ per-
formance across different datasets highlights key in-
sights. The CoxPH model, despite its strong perfor-
mance on test data, exhibited signs of overfitting, ne-
Figure 7: Failures of each component during the simulated
time.
cessitating further validation and regularization tech-
niques. The RSF model demonstrated good general-
ization in some components but struggled with over-
fitting in others, indicating the need for potential ad-
justments or alternative strategies for certain data sub-
sets. GBSA consistently delivered reliable results
across most components, confirming its robustness
and generalizability. Finally, FS-SVM showed varied
performance, excelling in some test scenarios while
underperforming in others, suggesting it might bene-
fit from further refinement or hybrid approaches.
In the simulation phase, the models selected for
each component, based on their c-index values, pro-
vided a solid foundation for generating accurate pre-
dictions and facilitating the creation of a user-friendly
interface for real-time decision-making. This compre-
hensive approach not only validated the chosen mod-
els but also highlighted areas for further enhancement.
5 CONCLUSIONS AND FUTURE
WORK
The application of survival analysis methods for pre-
dictive maintenance within the framework of Indus-
try 4.0 has demonstrated significant potential and ef-
fectiveness. This document evaluated several pre-
dictive models, including the Cox Proportional Haz-
ards model, Random Survival Forests (RSF), Gradi-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
134

ent Boosting Survival Analysis (GBSA), and Survival
Support Vector Machines (FS-SVM), on datasets
from both Gorenje and Microsoft Azure.
The results reveal that survival methods can be
highly effective for predicting maintenance needs in
an industrial setting. As it was seen, the Cox model
showed strong performance on test data, although it
exhibited overfitting, which necessitates further inves-
tigation and validation. The RSF model displayed
good generalization in some components but also
signs of overfitting in others, indicating the need for
model adjustments. The GBSA model consistently
performed well across different datasets, suggesting
it is a robust choice for generalizable predictive main-
tenance tasks. Meanwhile, FS-SVM showed poten-
tial, especially in specific test scenarios, though it may
benefit from further refinement.
A key advantage of using these survival analy-
sis models is the ability to generate Remaining Use-
ful Life (RUL) estimates, which are strongly impor-
tant for planning maintenance activities. The simula-
tion and dashboard interface developed using Stream-
lit provided a practical tool for visualizing these pre-
dictions, allowing maintenance schedules to be opti-
mized to minimize costs and downtime. The inter-
face facilitated real-time decision-making by enabling
users to simulate various scenarios and view detailed
reports on component health and predicted failures.
Despite the promising results, there are several ar-
eas for future work to enhance the application of pre-
dictive maintenance, which can be highlighted:
• Real-Time Data Integration: Implementing mod-
els that can handle real-time data streams will im-
prove the timeliness and accuracy of maintenance
predictions. This integration will also allow for
dynamic updating of RUL estimates and more re-
sponsive maintenance planning.
• Enhanced User Interface: Developing a more
complex and detailed user interface could provide
additional insights and functionality, such as more
granular control over simulation parameters and
detailed visualizations of component health trends
over time.
• Advanced Model Refinement: Further refinement
of models, particularly those showing signs of
overfitting or underperformance, could involve
hybrid approaches that combine the strengths of
multiple models or the integration of additional
data sources to improve prediction accuracy. The
use of other performance measures, such as the
Brier Score mentioned in section 2.4, can help to
compare the results obtained in the future.
• Scalability Testing: Testing the models and simu-
lation framework in larger, more diverse industrial
settings will ensure the scalability and robustness
of the solutions proposed.
In conclusion, this study emphasises the potential
of survival analysis methods in improving predictive
maintenance within Industry 4.0 environments. By
using advanced predictive models and user-friendly
interfaces, industries can move towards more effi-
cient, cost-effective, and reliable maintenance strate-
gies. Continued research and development in this
field will further solidify these methods’ role in the
next generation of intelligent and efficient mainte-
nance.
ACKNOWLEDGEMENTS
This work was partially supported by the
HORIZONCL4-2021-TWIN-TRANSITION-01
openZDM project, under Grant Agreement No.
101058673.
REFERENCES
Achouch, M., Dimitrova, M., Ziane, K., Sattarpanah Kar-
ganroudi, S., Dhouib, R., Ibrahim, H., and Adda, M.
(2022). On Predictive Maintenance in Industry 4.0:
Overview, Models, and Challenges. Applied Sciences,
12(16):8081.
Arena, F., Collotta, M., Luca, L., Ruggieri, M., and Ter-
mine, F. G. (2021). Predictive Maintenance in the Au-
tomotive Sector: A Literature Review. Mathematical
and Computational Applications, 27(1):2.
De Santis, R. B., Gontijo, T. S., and Costa, M. A. (2022).
A Data-Driven Framework for Small Hydroelectric
Plant Prognosis Using Tsfresh and Machine Learning
Survival Models. Sensors, 23(1):12.
Ferreira, C. and Gonc¸alves, G. (2022). Remaining Use-
ful Life prediction and challenges: A literature review
on the use of Machine Learning Methods. Journal of
Manufacturing Systems, 63:550–562.
Frumosu, F. D., Rønsch, G. Ø., and Kulahci, M. (2020).
Mould wear-out prediction in the plastic injec-
tion moulding industry: a case study. Interna-
tional Journal of Computer Integrated Manufactur-
ing, 33(12):1245–1258.
Gupta, S., Kumar, A., and Maiti, J. (2024). A critical review
on system architecture, techniques, trends and chal-
lenges in intelligent predictive maintenance. Safety
Science, 177:106590.
Madasamy, S., Shankar, B. P., Yadav, R. K., and P, J. K.
(2023). A Machine Learning Approach in Predic-
tive Maintenance in the IoT Enabled Industry 4.0. In
2023 4th International Conference on Smart Electron-
ics and Communication (ICOSEC), pages 418–423,
Trichy, India. IEEE.
Data-Driven Predictive Maintenance for Component Life-Cycle Extension
135

Mienye, I. D. and Sun, Y. (2022). A Survey of Ensemble
Learning: Concepts, Algorithms, Applications, and
Prospects. IEEE Access, 10:99129–99149.
Moat, G. and Coleman, S. (2021). Survival Analysis and
Predictive Maintenance Models for non-sensored As-
sets in Facilities Management. In 2021 IEEE Inter-
national Conference on Big Data (Big Data), pages
4026–4034, Orlando, FL, USA. IEEE.
P
¨
olsterl, S. (2024). scikit-survival: A Python package for
time-to-event analysis. Accessed: 2024-07-18.
Ramezani, S. B., Cummins, L., Killen, B., Carley, R., Amir-
latifi, A., Rahimi, S., Seale, M., and Bian, L. (2023).
Scalability, Explainability and Performance of Data-
Driven Algorithms in Predicting the Remaining Use-
ful Life: A Comprehensive Review. IEEE Access,
11:41741–41769.
Rossini, R., Prato, G., Conzon, D., Pastrone, C., Pereira,
E., Reis, J., Goncalves, G., Henriques, D., Santi-
ago, A. R., and Ferreira, A. (2021). AI environment
for predictive maintenance in a manufacturing sce-
nario. In 2021 26th IEEE International Conference
on Emerging Technologies and Factory Automation
(ETFA ), pages 1–8, Vasteras, Sweden. IEEE.
Shen, J., Yang, D., Zhou, Y., Pei, J., Wu, Z., Wang, X.,
Zhao, K., and Ding, Y. (2024). Development of
machine learning models for patients in the high in-
trahepatic cholangiocarcinoma incidence age group.
BMC Geriatrics, 24(1):553.
Tran, T. T., Lee, J., Gunathilake, M., Kim, J., Kim, S.-
Y., Cho, H., and Kim, J. (2023). A comparison of
machine learning models and Cox proportional haz-
ards models regarding their ability to predict the risk
of gastrointestinal cancer based on metabolic syn-
drome and its components. Frontiers in Oncology,
13:1049787.
Yang, Z., Kanniainen, J., Krogerus, T., and Emmert-Streib,
F. (2022). Prognostic modeling of predictive mainte-
nance with survival analysis for mobile work equip-
ment. Scientific Reports, 12(1):8529.
Zeng, C., Huang, J., Wang, H., Xie, J., and Zhang, Y.
(2023). Deep Bayesian survival analysis of rail use-
ful lifetime. Engineering Structures, 295:116822.
Zhou, B., Pychynski, T., Reischl, M., Kharlamov, E., and
Mikut, R. (2022). Machine learning with domain
knowledge for predictive quality monitoring in resis-
tance spot welding. Journal of Intelligent Manufac-
turing, 33(4):1139–1163.
Zonta, T., da Costa, C., da Rosa Righi, R., de Lima, M.,
da Trindade, E., and Li, G. (2020). Predictive mainte-
nance in the Industry 4.0: A systematic literature re-
view. Computers and Industrial Engineering, 150.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
136
