
SkRobot with TeleoR/QuLog: A Pseudo-Realtime Robotics Data
Distribution Service Extended with Production Rules and Reasoning
Giovanni De Gasperis
a
, Daniele Di Ottavio
b
and Sante Dino Facchini
c
Dipartimento di Ingegneria e Scienze dell’Informazione e Matematica, Universit
´
a degli Studi dell’Aquila, Italy
Keywords:
Agents, Cognitive Robotics, Distributed Systems, Middleware, Real-Time Systems, Robot Development,
Framework, Robot Production Rules, Reasoning.
Abstract:
Designing and developing robots, particularly those with cognitive capabilities, is a complex task. The design
platform and middleware Data Distribution Service we present in this paper, SkRobot, is meant to simplify
this process. Built on the C++ SpecialK framework, it offers several functions to model robot behaviour,
like active data brokering, distributed storage and processing, and pseudo-realtime synchronisation. SkRobot
brings efficient communication between system entities using FlowProtocol, a custom protocol that guarantees
robust typed binary data transfer over network channels. In this work the SkRobot architecture is extended and
integrated with QuLog/TeleoR. QuLog (Query Language for Ontologies) and TeleoR (Teleological Reasoning)
are two related technologies that enable robots to reason about their goals, actions, and the environment.
QuLog is a query language that allows robots to ask questions about their knowledge base, while TeleoR is a
Prolog logic reasoning system that enables robots to plan and execute actions to achieve their goals. To prove
the successful integration between SkRobot and Qulog/TeleoR we implemented a virtual robotics simulation
involving a NAO humanoid robot performing a target retrival task.
1 INTRODUCTION
Taking as starting reference the theoretical model
of agents presented in the book ”Artificial Intelli-
gence: Foundations of Computational Agents” (Poole
and Mackworth, 2010), we postulate an program-
ming ecosystem to design and develop computational
agents relevant to cognitive robotics in the context of
the embodied artificial intelligence (Chrisley, 2003).
Each agent is defined as an entity that pursues goals
by interacting with and modifying its environment
based on sensory inputs and feedback. Agents are
classified by their environmental impacts and goal
attainment methods: with either reactivity or proac-
tivity. Reactive agents respond to stimuli with pre-
determined actions and are prone to errors in com-
plex scenarios. Proactive agents increase their au-
tonomy to analyse information and make decisions
based on context, a knowledge base and past experi-
ences (Costantini et al., 2017). Cognitive agents must
be structured hierarchically with at least three main
a
https://orcid.org/0000-0001-9521-4711
b
https://orcid.org/0009-0008-2531-2170
c
https://orcid.org/0000-0002-2009-5209
layers: (i) the decision-making one to evaluate per-
ceptions and managing goals; (ii) the central one to
control, produce perceptions and proprioceptions, and
get feedback; (iii) the peripheral one to interface with
hardware, including sensors and actuators.
The peripheral layer acquires environmental stim-
uli from sensors, process them to feed the control
layer with perceptions, while actuators combine com-
mands coming from upper layers decisions with in-
formation and feedback coming from monitoring de-
vices, so to adjust and execute actions (Poole and
Mackworth, 2010; Mitchell et al., 1991; Raven et al.,
1991) . In particular, internal sensors monitor action
progress and provide feedback that modulates actu-
ator activities, which is essential for rapid response
adjustments. Perceptions are instead multi-stimulus
aggregations requiring efficient data management
for real-time responsiveness (Poole and Mackworth,
2010; Moulin-Frier et al., 2017). When simulating
robotic systems, implementing attention mechanisms
to filter out irrelevant stimuli is crucial. Also, in-
tegrating real-time, parallel, and asynchronous com-
munication is important as in distributed program-
ming, were problems pose significant challenges and
offer innovative solutions through advanced middle-
408
De Gasperis, G., Di Ottavio, D. and Facchini, S. D.
SkRobot with TeleoR/QuLog: A Pseudo-Realtime Robotics Data Distribution Service Extended with Production Rules and Reasoning.
DOI: 10.5220/0013014900003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 408-415
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

ware designs (Costantini et al., 2021; Dyoub and De
Gasperis, 2017).
In this scenario, we introduce our extension of the
SkRobot server application (Di Ottavio, 2024b) to
foster effective data transfer between agents and in-
troduce rigorous production rules and reasoning.
2 RELATED WORKS
Designing a cognitive robot requires a multidisci-
plinary approach that combines many areas of ex-
pertise: systems and network engineering, physical-
environmental sciences, control systems and electron-
ics. Actual important stems of research are: (i) robot’s
operability and relative hardware resource manage-
ment, (ii) software control both at high and low level,
(iii) integration of multiple complex programs that in-
terface with environmental inputs such as audio or
video, and (iv) objects or sounds recognition.
2.1 Middleware Solutions
Researching of pre-built middleware and specialised
applications that simplify the development in afore-
said stems is a valuable activity. As standards de-
facto in this middleware solutions, we consider two
most valuable tools: Redis
1
that is commonly used
for real-time data brokering in distributed systems,
while in the SDKs sector ROS (Robot Operating Sys-
tem)
2
offers essential tools and libraries, facilitating
robotic functionalities without starting from scratch
(Quigley et al., 2009). Robot developers often im-
plement many features using ROS as middle-ware,
abstracting hardware to manage processes and com-
munication. Its modular architecture allows focused
development on navigation, perception, and control.
The active ROS community contributes to a reposi-
tory of software packages, solving common robotics
challenges and promoting innovation and efficiency
in robotic design. Despite this, ROS proves to be very
complicated in the installation and setup phases re-
lated to the development environment and in its inte-
gration into the operating system. Additionally, cre-
ating and maintaining development projects based on
ROS involves numerous procedures and formalities,
often in the form of artefacts that are unnecessary
for the development itself. The result is a very steep
learning curve, specially for robotics students, which
often drain resources from the theoretical concepts
underlying robot agent theory. Moreover, the only
1
https://redis.io, last accessed July 2024
2
https://www.ros.org, last accessed July 2024
ROS supported Unix-based operating systems are the
most recent versions of Ubuntu, Fedora, and Debian
GNU/Linux distributions. This excludes the possi-
bility of creating minimal embedded systems which
may not even require an OS, such as those based on
micro-controllers. SkRobot require few, at least (i.e.
without computer-vision, audio support and others),
Unix base system dependencies, as: libc, libstd++,
libssl, libpthread, libm, libz, other than an essential
C++ compilation environment, based on gcc (this is
preferable due to its open-source license, other than
its permissive checks) or also clang, with their tool-
chains, followed by make. These system parts are in-
stalled by default o many Unix-base system, anyway,
if not, their installation are commonly very simply on
each of these operating systems. If the need is to com-
pile some code based on SpecialK (Sk) (Di Ottavio,
2024c) that requires extended supports dependencies,
these could be more than many (i.e., the computer-
vision support requires the development package for
OpenCV-4.x, with its several dependencies).
2.2 SkRobot Server Application
The SkRobot FlowNetwork service, proposed in this
paper for TeleoR integration, relays upon SpecialK, a
previous work of authors those involved extensive ex-
perimentation with various application frameworks,
notably the Qt SDK (Dalheimer, 2002). In particular,
inspired by it, we adapted Qt’s Signal/Slot paradigm
to SpecialK, improving the traditional callback mech-
anisms used in ROS and creating complex yet man-
ageable connection graphs among class functional-
ities. However, Qt was eventually deemed unsuit-
able due to its high commercial costs and event man-
agement system, which does not prioritise time —
a critical factor for distributed systems with pseudo-
realtime synchronisation used in robotics. SpecialK
also integrated programming modalities found in
other platforms like C++ sketches from the Arduino
platform for firmware-oriented micro-controller pro-
gramming (Monk and McCabe, 2016). An inte-
gration layer of SpecialK’s is represented by the
Sk/PySketch engine (Di Ottavio, 2024a)
3, 4
. It is a
Python binding of the FlowProtocol, compatible with
Python versions 2.7.x/3.6 (and upper), that permits an
high-level and simple development way to create so
called satellites for FlowNetwork apparatuses
5
(Fig.
1a).
3
https://gitlab.com/Tetsuo-tek/SkRobot/-/blob/main/ex
amples/publisher.py, last accessed June 2024
4
https://gitlab.com/Tetsuo-tek/SkRobot/-/blob/main/ex
amples/subscriber.py, last accessed June 2024
5
https://gitlab.com/Tetsuo-tek/SpecialK/- /tree/mas
ter/LibSkCore/Core/System/Network/FlowNetwork, last
SkRobot with TeleoR/QuLog: A Pseudo-Realtime Robotics Data Distribution Service Extended with Production Rules and Reasoning
409
2.3 Rule-Based Languages
On the reasoning and production rules side, here
we are going to consider the integration of the
TeleoR/QuLog (T/Q) reasoning system (Clark and
Robinson, 2017) on the FlowNetwork, with the aim of
creating a decision-making layer for the robotic agent.
Unix
TCP/IP
TTY
Sat E
Sat D
Sat C
Sat B
Sat A
Sat F
Service
Sat H
Sat G
(a) Mono-centralized
SkRobot II
SkRobot IV
SkRobot III
SkRobot I
(b) Multi-centralized
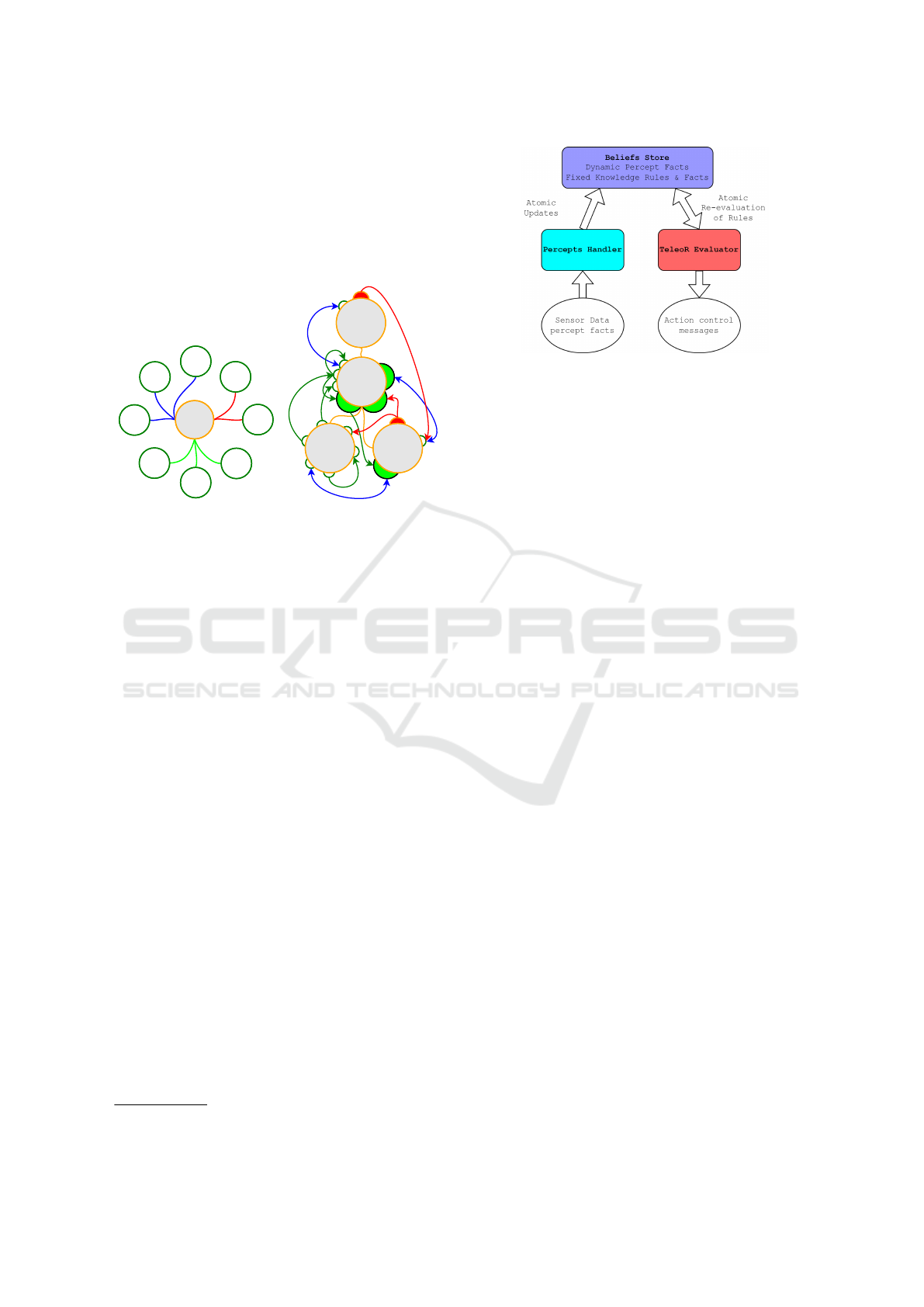
Figure 1: (a) Satellites in a Mono-centralized FlowNet-
work. They are aplications that manage sensors and actu-
ators exchanging data with SkRobots. (b) Multi-centralized
FlowNetwork/DipoleNetwork were multiple hubs have
their own satellites, arrows are P2P connections.
QuLog/TeleoR (Clark and Robinson, 2017) is a
major extension of Nilsson’s Teleo-Reactive (TR)
rule-based robotic agent programming language
(Nilsson, 1993). It consists of sequences of guarded
action rules grouped into parameterised procedures.
The guards are deductive queries to a set of dynamic
facts in the agent’s Belief Store, and the actions can
be primitive actions for external robotic resources or
calls to TeleoR procedures. TeleoR enhances TR
by being typed, higher-order, and offering more rule
forms for finer control over task behaviour. Its belief
store inference language, QuLog a Prolog extension,
is a higher-order logic and function rule language
that also supports action rules for agent behaviour
threads. TeleoR introduces task atomic procedures
for high-level multitasking with multiple robotic re-
sources, ensuring non-interference, deadlock-free,
and starvation-free task execution through compiler-
generated coordination code. The programmer is ab-
stracted from the coordination details handled by the
TeleoR compiler.
Both, TeleoR and TR, are mid-level robotic agent
programming languages that rely on lower-level rou-
tines in languages like C for sensor interpretation and
complex robotic actions. Sensor interpretation results
are stored as percept facts in the agent’s belief store,
such as detecting a block on a table. Actions, like
accessed June 2024
Figure 2: Simple Two Thread TeleoR Agent Architecture.
placing a block, are initiated based on these beliefs,
though external events can interfere, delaying or al-
tering outcomes.
TR and TeleoR determine when to invoke these
actions to achieve sub-goals linked to a larger task,
assuming percept beliefs accurately reflect the envi-
ronment. TeleoR agents use a two-thread architecture
(Fig. 2): one thread updates the belief store with new
percepts atomically, while the other determines and
executes action responses based on these updates.
TeleoR syntax is similar to TR, with formal opera-
tional semantics detailed in specific literature. TeleoR
introduces features for both single-task and multi-task
agents, allowing them to share and manage robotic re-
sources efficiently. Future extensions of TeleoR and
its agent architecture are planned.
3 METHODOLOGY
The goal of our work is to propose an extensions to
our SkRobot application in order to add reasoning
capabilities offered by TeleoR/QuLog. The idea un-
derlying this proposal is to increment SkRobot pos-
sibilities acting as a collector (it offer bigger flexibil-
ity and scalability), enhancing and possibly substitut-
ing the Pedro as message broker and ultimately in-
tegrating TeleoR/QuLog with FlowNetwork (Fig 3).
The SkRobot defines a structure that enables the en-
tity to receive stimuli from its surroundings and per-
form valuable and logical actions by modifying the
state of the environment itself, without allowing pro-
cesses of acquisition and activity to interfere with
each other. The main features of the communication
layer of SkRobots that connects all the entities are
(i) parallelism, (ii) functional asynchrony, (iii) reac-
tivity efficiency, (iv) real-time (as much as possible),
(v) data and events distribution.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
410
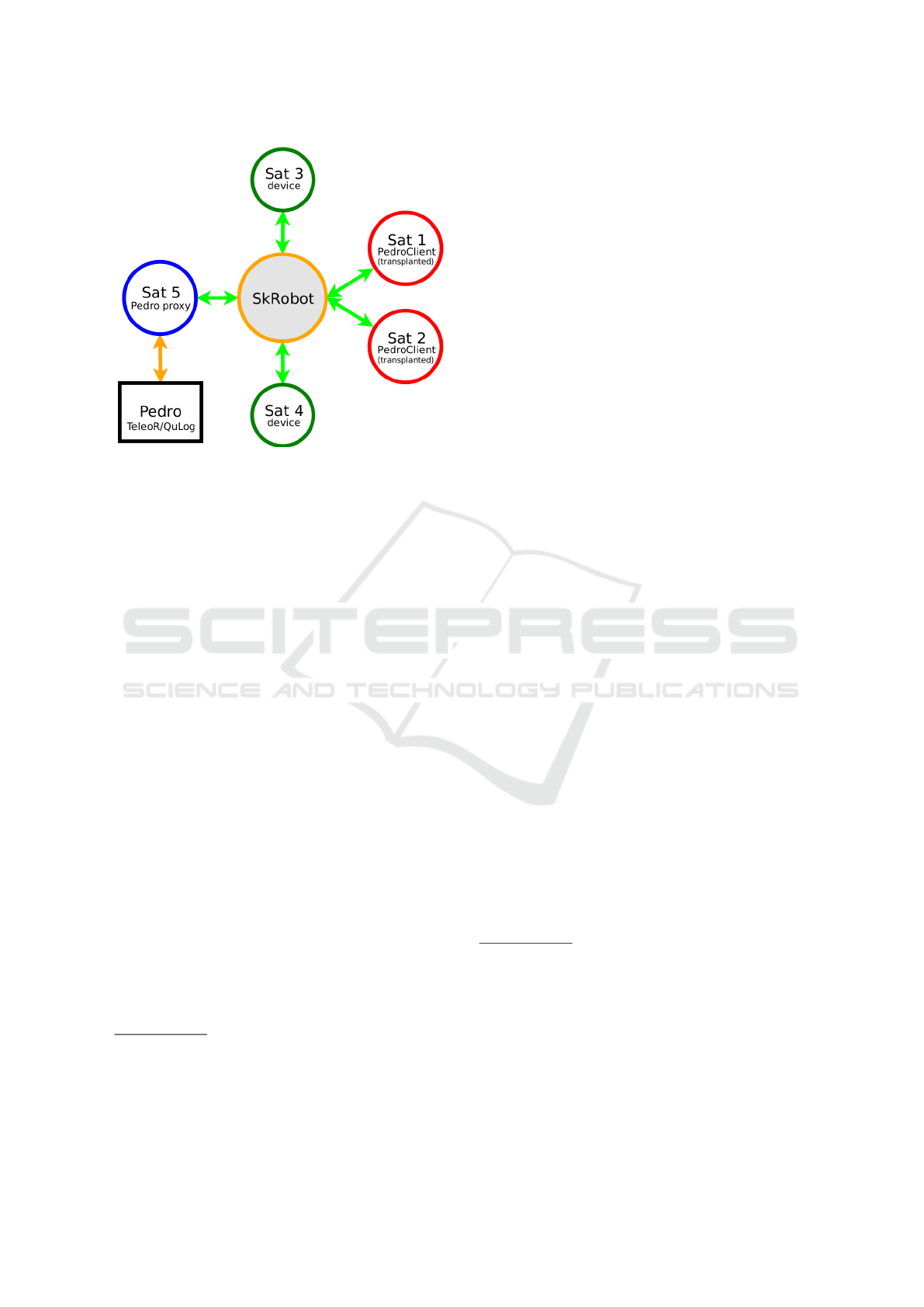
Figure 3: TeleoR/QuLog/QuProlog integration on FlowNet-
work.
3.1 Software Engineering Aspects
The SkRobot server application, based on the Spe-
cialK framework, has design philosophy that en-
hance low-level communication use for managing
asynchronous input/output. It provides a stream-
lined method for developing robotic systems, address-
ing various implementation needs in robotics and re-
lated fields. SkRobot helps developers quickly un-
derstand and apply different study cases and solu-
tions, simplifying the design process. Key con-
cepts in SkRobot and SpecialK include active data-
brokering, distributed storage, distributed process-
ing, and pseudo-real-time synchronisation. Spe-
cialK, a C++ framework compatible with the Stan-
dard Template Libraries (STL), enforces paradigms
such as asynchronous and recursive destruction of ob-
jects, Signal/Slot interactions, and event/pulse man-
agement. The design of robust and lightweight
time management applications in robotics avoids us-
ing mutexes or semaphores, instead leveraging asyn-
chronous collaboration as per Sk’s paradigms for effi-
cient parallel programming. Similar to the Qt frame-
work, Sk uses the Signal/Slot paradigm for single
process programming-flow concurrency. Sk mini-
mizes dependencies on external libraries, typically re-
quiring only open-source components like OpenCV
6
,
PortAudio
7
, FFTW
8
, OggVorbis
9
, and FLTK
10
for
GUI support. Features can be toggled via compila-
tion macros, allowing/disallowing direct inclusion of
6
https://opencv.org, last accessed June 2024
7
https://portaudio.com, last accessed June 2024
8
https://fftw.org, last accessed June 2024
9
https://xiph.org, last accessed June 2024
10
https://fltk.org, last accessed June 2024
framework artefacts in application code, thus enhanc-
ing control over changes. At now, Sk and its tools are
released as rolling framework environment.
The foundational class in SpecialK’s hierarchy is
SkFlatObject
11
, providing basic functionality be-
yond instance naming. All Sk data structures de-
rive from SkFlatObject, they designed for sim-
ple instantiation and automatic memory management
when stack-allocated
12
. The SkObject class
13
, a
very important SkFlatObject derivative, introduces
enhancements for efficient programming way. In-
stances of SkObject derivatives should be created
with the new operator and destroyed asynchronously
using destroyLater() to avoid runtime errors, en-
suring proper integration with system interactions.
Objects are automatically destroyed in two cases:
when a parent object is destroyed (forming a de-
struction tree) and when the event manager termi-
nates its activity, so avoiding the existence of a
dedicated garbage collector process. Otherwise,
the destroyLater() method must be used to re-
lease resources, with resource allocation managed by
the SkEventLoop manager
14
, which operates on a
pulse or tick basis similar to an Arduino sketch’s
loop() function. This approach is fundamental to
the SpecialK Python sketches (Sk/PySketch) and the
FlowProtocol, where each thread operates under an
SkEventLoop instance generating configurable ticks.
3.1.1 Pulsating Tick Timing
In the Sk framework, optional threads can have cus-
tomised tick intervals and modes or inherit defaults
from the main application thread, enabling synchro-
nised or individualised operations. Each event loop
manager emits three types of ticks at different speeds:
• FastTick: The fastest, non-divisible tick repre-
senting maximum processing speed.
• SlowTick: A passive tick with an interval equal
to or greater than FastTick.
• OneSecTick: A passive tick occurring every sec-
ond.
Passive waiting for SlowTick and OneSecTick
is managed using SkElapsedTime, a nanosecond-
11
https://gitlab.com/Tetsuo-tek/SpecialK/-/blob/maste
r/LibSkFlat/Core/Object/skflatobject.h, last accessed June
2024
12
https://gitlab.com/Tetsuo-tek/SpecialK/-/tree/master/
LibSkFlat/Core/Containers, last accessed June 2024
13
https://gitlab.com/Tetsuo-tek/SpecialK/-/blob/mas
ter/LibSkCore/Core/Object/skobject.h, last accessed June
2024
14
https://gitlab.com/Tetsuo-tek/SpecialK/-/blob/maste
r/LibSkCore/Core/App/skeventloop.h, last accessed June
2024
SkRobot with TeleoR/QuLog: A Pseudo-Realtime Robotics Data Distribution Service Extended with Production Rules and Reasoning
411

resolution timer, while active waiting in FastTick
mode involves suspending the thread using
usleep(...) or nanosec(...). SlowTick and
OneSecTick are for less frequent tasks like monitor-
ing and control, while FastTick handles immediate
tasks such as network communication.
For multiple-thread applications, consumer
threads must pulse as frequently as or more than
producer threads to avoid issues like queue overflow.
Monitoring job-time amplitude during tick processing
ensures it doesn’t exceed FastTick intervals, which
could slow the tick rate and degrade performance.
The cadence for FastTick, SlowTick, and One-
SecTick can follow various modes:
• Regular Coarse Timing: Uses usleep(...),
being lighter on resources.
• Pseudo-Real-Time Timing: Uses
nanosec(...), more CPU-intensive but precise.
• Socket I/O Timing: CPU-intensive if traffic is
high, based on socket activity.
• GUI Activity Timing: lighter on CPU, based on
FLTK event handler.
• No Timing: Uses an external blocking call to
slow down the pulse activity, comparable to a
while(1){...} construct.
The Signal/Slot paradigm, crucial in programming
workflow, evolved from callback functions. Callback
functions, used in languages like C and Python, also
adopted in ROS, handle specific events, such as a
button click triggering a predefined function. In the
Signal/Slot paradigm, a Signal is a method declared
without scope, while a Slot functions like a standard
method but always returns void. Unlike callbacks,
Signals can be connected to multiple Slots, even from
different object unknown types, using the Attach
functional macro
15, 16, 17
.
Signals and Slots must be publicly declared within
a class to be observable and manageable by the event
manager. Private or protected declarations cause run-
time errors due to visibility restrictions. The ’ex-
tends’ macro ensures public inheritance for manag-
ing interactions across derived types, facilitating syn-
chronisation without mutexes or wait conditions, thus
streamlining Inter-Object Communication (IOC) and
enhancing responsiveness.
Attach and Detach operations are asynchronous,
scheduled for the next pulse by the event man-
15
https://gitlab.com/Tetsuo-tek/SpecialK/-/blob/master/
LibSkFlat/skdefines.h, last accessed June 2024
16
https://gitlab.com/Tetsuo-tek/SpecialK/-/blob/master/
LibSkCore/Core/Object/sksignal.h, last accessed June 2024
17
https://gitlab.com/Tetsuo-tek/SpecialK/-/blob/master/
LibSkCore/Core/Object/skslot.h, last accessed June 2024
ager. A Signal triggered immediately after an Attach
won’t activate the connected Slot until the next tick.
Attach operations typically occur in the object’s
Constructor, and Detach happens during the ob-
ject’s destruction, maintaining stable connections.
3.1.2 Signal/Slot Connection Modes
When a Signal is triggered, it acts like a method call.
Connected Slots execute their code immediately or
asynchronously in their respective threads, ensuring
immediate Signal trigger and flexible Slot execution.
Connection modes between Signal and Slot differ on
application needs. Connection mode can be: (i) Di-
rect: Slots are invoked directly when the Signal is
triggered. This is similar to the Slot method being
called to execute the code in the triggering thread
where the code that requested the triggering Signal
lives. (ii) Queued: Slots are queued for future invoca-
tion by the event manager at the next round and in the
programming-flow of the owning thread, even when
the Signal call comes from another manager, hence a
different thread. Triggering a connected Signal with
queuing mode never blocks the triggering call, even
when the Signal and Slot reside in the same thread.
(iii) OneShot (direct or queued): Slots are invoked as
illustrated in the previous two points but only once;
immediately after the invocation, the disconnection
occurs automatically.
A Signal can connect to multiple Slots but not the
same Slot more than once. When triggered, a Sig-
nal can pass SkVariant arguments to the Slots. Di-
rect calls allow Slots to access pointers to the original
values, while queued calls provide argument copies,
avoiding critical sections and mutual exclusion issues
for multi-threaded approach
18
. The SkVariant class
encapsulates diverse data types, including primitives,
complex structures, and pointers.
For thread synchronisation without mutexes or
wait conditions, queued-type connections between
Signals and Slots from different threads are recom-
mended to prevent deadlocks and efficiency losses.
This allows processing tasks to be isolated across
different classes, maintaining interaction through dy-
namic runtime meta-links.
The SkRobot application, developed in C++, man-
ages data Flow in autonomous devices, robotic sys-
tems, and industrial production lines. It supports I/O
management and custom network services in Unix-
like environments with minimal dependencies, ad-
hering to the POSIX standard. SpecialK and its
subordinated applications like SkRobot, simply com-
18
https://gitlab.com/Tetsuo-tek/SpecialK/-/blob/master/
LibSkFlat/Core/Containers/skvariant.h, last accessed June
2024
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
412

pile and run on all unix-based system; SkRobot was
tested on: Void-Linux, Gentoo, Ubuntu, Elementary-
OS, Raspberry-OS, Armbian, GNU/Hurd, Haiku-
OS, Minix, NetBSD, FreeBSD, and finally MacOS
(through Homebrew) - we excluded Microsoft Win-
dows from tests.
3.2 Flow Protocol
Sk defines the FlowProtocol for inter-process commu-
nication between entities (modules and satellites with
their hubs, (see Fig.1a and Fig.1b) on various net-
work supports, such as serial TTY lines, Unix-domain
sockets, TCP, UDP, and WebSockets.
Communication uses a binary format with struc-
tured frames, distinguishing between synchronous
(blocking) and asynchronous (non-blocking) com-
mands. Errors in communication result in connec-
tion termination. The SkFlowServer class manages
these communications, supporting both synchronous
and asynchronous connections. All connections start
as synchronous and can become asynchronous af-
ter authentication, facilitating distributed computa-
tional tasks across different processes and threads.
Database service management are handled through
the SkFlowPairDatabase class.
In SkRobot, database operations depend on the
current database label setup, executed whenever the
database target changes. Variables are stored as la-
beled SkVariant instances, which can handle vari-
ous data types (primitives and more complex struc-
tures) with the possibility to convert them to/from
JSON structures. Protocol commands using variables
have JSON-text counterparts for platforms where
SkVariant does not exist yet, like Python. Asyn-
chronous commands do not receive responses but can
trigger messages. For synchronous data requests, a
temporary connection is established and closed af-
ter retrieval. Data distribution occurs through Flow
channels within asynchronous connections, prevent-
ing interference from different data types. SkRobot
can manage up to 32768 flow channels, each uniquely
identified by ID, name and hash. Channels can either
(i) distribute streaming data to multiple consumers
(1:N) or (ii) provide request/response services (1:1);
service channels dialogues can be of synchronous
(blocking response) or asynchronous type (FlowNet-
work non-blocking event). Disconnection of satellites
removes their channels along with their established
relationships.
SkRobot’s modular architecture uses FlowNet-
work for communication, with internal modules en-
hancing system synchronisation. These modules de-
rive from the SkAbstractModule interface, man-
aging parameters via JSON and requiring redefined
virtual methods. External satellites, managed by
the class SkFlowSat, automate connection, Flow set
management, and event subscription, reducing repeti-
tive coding and ensuring compatibility within the net-
work. Examples of C++ and Python code can be ac-
quired from SkRobot repository
19
.
4 TeleoR INTEGRATION
Regarding the integration of TeleoR/QuLog into the
FlowNetwork, various potential solutions have been
explored. The most immediate and promising for fu-
ture developments appears to be the one where a satel-
lite implemented in Python, based on the PySketch
engine, incorporates both the client component for the
FlowNetwork (represented by the FlowSat class) and
the client component for the Pedro server (represented
by the Python PedroClient class).
This approach enables a seamless integration be-
tween the two communication protocols, with the in-
volved satellite functioning primarily as a proxy. The
satellite, which adheres to the integration protocol,
also opens one or more input channels to accept per-
ceptions generated by other satellites within the same
FlowNetwork. These perceptions are subsequently
forwarded to Pedro. TeleoR, operating within the Pe-
dro framework, processes the incoming perceptions
and produces a decision response, which can be trans-
mitted back as feedback to the perceptions acquired.
The perceptions themselves can be captured
through various mechanisms, such as a microservice
operating in a request/response format (either syn-
chronous or asynchronous, and either textual or bi-
nary), or via binary or textual streaming channels that
can be subscribed to by the proxy. These streams
originate from distribution satellites within the same
FlowNetwork. By utilizing these diverse input meth-
ods, the satellite effectively serves as a transparent
intermediary, ensuring communication between the
distributed entities in the system while delegating
decision-making processes to the TeleoR reasoning
engine in Pedro.
5 NAO ROBOT CONTROL
As a proof-of-concept implementation of the meth-
ods presented in previous Section, we integrate a de-
cision maker developed with TeleoR/QuLog with a
NaoSat robot performing a target retrival task. The
19
https://gitlab.com/Tetsuo-tek/SkRobot/-/tree/main/ex
amples, last accessed June 2024
SkRobot with TeleoR/QuLog: A Pseudo-Realtime Robotics Data Distribution Service Extended with Production Rules and Reasoning
413

Figure 4: Simulation of the NAO humanoid robot after run-
ning the QuLog/TeleoR control program, getting close to its
target.
NAO robot (Gouaillier et al., 2009) has been simu-
lated with the Coppelia robot simulator
20
, in a simple
scene with a table where on top lays a red ball. The
NAO sensors are the two torso sonars, left and right,
and the frontal camera. The NaoSat from the sensor
readings creates the perceptions
def dir::= left | centre | right
def object::= ball | duck
percept holding(), see(num, dir)
to determine where the red ball is seen in the visual
range of the camera. It then subscribe to the Pe-
droSat/TeleoR notify channel to receive motion com-
mands. The QuLog/TeleoR agent program receives
perceptions as QuLog-subscribe string, through a
service-channel, and plans accordingly the motion
command to engage, with the following main TeleoR
program:
tel collect_object()
collect_object(){
taken()
˜> ()
too_close()
˜> get_next_to()
next_to(centre)
˜> grab()
next_to(Dir)
˜> turn(Dir,0.2)
holding()
˜> release()
true
˜> get_next_to()
}
Fig.4 shows the simulation with the NAO hu-
manoid robot that almost accomplished the task of
finding and grabbing the target red ball, after the ex-
ploration of the environment.
In doing this we replace the standard Pedro mes-
sage broker with the PedroSat (an external satellite
20
https://www.coppeliarobotics.com, last accessed July
2024
Figure 5: The integration of the TeleoR/Qulog/QuProlog
satellite in the NAO robot controller.
Python sketch) connecting to a SkRobot service hub
(see Fig.3 and 5), and also accepting old style Pedro
clients, where can connect TeleoR (living its code un-
touched during this first integrating step).
Another external satellite sketch is represented by
the agent (named NaoSat in the Fig.5) that is able to
collect all physical inputs and outputs. This satellites
inherit a PedroClient (transplanted) able to work di-
rectly on the FlowNetwork, bypass the canonical Pe-
dro connection. Through SkRobot the NaoSat uses
TeleoR to make light and logic reasoning, simply on
CPU with a very low power-energy needs.
6 CONCLUSIONS
In this work we extended the SkRobot development
environment and data distribution service to integrate
logical reasoning and production rules that guide
a robust and dynamic robot planner in real-time,
while exploring an unknown and unstructured envi-
ronment. We proposed a design and implementa-
tion methodology for augmenting SkRobot satellite
applications with a computational logic module and
discussed a proof-of-concept preliminary demonstra-
tor simulating a cognitive humanoid robot guided by
QuLog/Teleor program.
6.1 Paper Contribution
The main contribution of our paper, consist in provid-
ing a framework that paves the road for the application
in real-world scenarios of intelligent multi-robots sys-
tems acting with pseudo real-time timing constraints.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
414

Such innovation could be a key enabler for swarm-
robots industry where real-time features are very im-
portant for management and control. Furthermore
SkRobots can supply a reliable base to develop dis-
tributed applications with reactive and proactive be-
haviours as well as reasoning system creating a real
decision-making layer for robots.
6.2 Future Works
Future developments of SkRobots may include the ad-
dition of accountability and trackcability properties
to foster better Human-Swarm Interaction (HSI) in-
tegration in the fields of multi-robots. This could be
implemented inserting Distributed Ledger Technolo-
gies (DLT) in satellites and communication channels
that would allow decisions and commands to be im-
mutable and inspectable.
ACKNOWLEDGEMENTS
This research was partially funded by NextGener-
ationEU under the Italian Ministry of University
and Research (MUR) National Innovation Ecosys-
tem grants with the following codes: ECS00000041
VITALITY CUP: E13C22001060006; ADVISOR
- PRIN 2022 PNNR Prog. P202277RJ2-PE6 CUP:
E53D23016270001; TRUSTPACTX - PRIN 2022
Prog. 20228FETWM CUP: E53D23007850001.
Authors used occasionally on line generative AI
tools to improve the readability of the text; they re-
viewed and edited the content as needed, and took full
responsibility for the content of the publication.
REFERENCES
Chrisley, R. (2003). Embodied artificial intelligence. Arti-
ficial intelligence, 149(1):131–150.
Clark, K. L. and Robinson, P. J. (2017). Concurrent task
programming of robotic agents in teleor. In RuleML+
RR (Supplement).
Costantini, S., De Gasperis, G., Lauretis, L., et al. (2021).
An application of declarative languages in distributed
architectures: ASP and DALI microservices. Interna-
tional Journal of Interactive Multimedia and Artificial
Intelligence, 6(5):66–79.
Costantini, S., De Gasperis, G., and Nazzicone, G. (2017).
DALI for cognitive robotics: Principles and proto-
type implementation. In Practical Aspects of Declara-
tive Languages: 19th International Symposium, PADL
2017, Paris, France, January 16-17, 2017, Proceed-
ings 19, pages 152–162. Springer.
Dalheimer, M. (2002). Programming with QT: Writing
portable GUI applications on Unix and Win32. ”
O’Reilly Media, Inc.”.
Di Ottavio, D. (2024a). Pysketch engine emulating arduino-
sketches, useful to build satellites, compatible with
python 2 and 3.
Di Ottavio, D. (2024b). Skrobot application server, an hub
for flow-sat clients based on flow-protocol.
Di Ottavio, D. (2024c). Specialk c++ framework based on
signal/slot, pseudo-real-time pulsing and recursive ob-
ject destruction.
Dyoub, A. and De Gasperis, G. (2017). Rule-based supervi-
sor and checker of deep learning perception modules
in cognitive robotics. In RuleML+ RR (Supplement).
Gouaillier, D., Hugel, V., Blazevic, P., Kilner, C., Mon-
ceaux, J., Lafourcade, P., Marnier, B., Serre, J., and
Maisonnier, B. (2009). Mechatronic design of NAO
humanoid. In 2009 IEEE international conference on
robotics and automation, pages 769–774. IEEE.
Mitchell, L. G., Mutchmor, J. A., and Dolphin, W. D.
(1991). Zoologia. Zanichelli.
Monk, S. and McCabe, M. (2016). Programming Arduino:
getting started with sketches, volume 176. McGraw-
Hill Education New York.
Moulin-Frier, C., Fischer, T., Petit, M., Pointeau, G.,
Puigbo, J.-Y., Pattacini, U., Low, S. C., Camilleri,
D., Nguyen, P., Hoffmann, M., et al. (2017). Dac-
h3: A proactive robot cognitive architecture to acquire
and express knowledge about the world and the self.
IEEE Transactions on Cognitive and Developmental
Systems, 10(4):1005–1022.
Nilsson, N. (1993). Teleo-reactive programs for agent con-
trol. Journal of artificial intelligence research, 1:139–
158.
Poole, D. L. and Mackworth, A. K. (2010). Artificial Intel-
ligence: foundations of computational agents. Cam-
bridge University Press.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. (2009). ROS: an
open-source robot operating system. ICRA Workshop
on Open Source Software, 3.
Raven, P. H., Evert, R. F., and Eichhorn, S. E. (1991). Bi-
ologia delle piante. Zanichelli.
SkRobot with TeleoR/QuLog: A Pseudo-Realtime Robotics Data Distribution Service Extended with Production Rules and Reasoning
415
