
Model-Based Digital Twin for Collaborative Robots
Jeshwitha Jesus Raja
a
, Shaza Elbishbishy
b
, Yanire Gutierrez
c
, Ibrahim Mohamed,
Philipp Kranz
d
and Marian Daun
e
Center of Robotics, Technical University of Applied Sciences W
¨
urzburg-Schweinfurt, Schweinfurt, Germany
Keywords:
Collaborative Robot, Digital Twin, Model-Based Engineering, Conceptual Modeling.
Abstract:
Industry 4.0 is reshaping the way individuals live and work, with significant impact on manufacturing pro-
cesses. Collaborative robots, or cobots-designed to be easily programmable and capable of directly interacting
with humans-are expected to play a critical role in future manufacturing scenarios by reducing setup times,
labor costs, material waste, and processing durations. However, ensuring safety remains a major challenge in
their industrial application. One promising solution for addressing safety, as well as other real-time monitoring
needs, is the digital twin. While the potential of digital twins is widely acknowledged in both academia and
industry, current implementations often face several challenges, including high development costs and the lack
of a systematic approach to ensure consistency between the physical and virtual representations. These lim-
itations hinder the widespread adoption and scalability of digital twins in industrial processes. In this paper,
we propose a model-based approach to digital twins, which emphasizes the reuse of design-time models at
runtime. This ensures a coherent relationship between the physical system and its digital counterpart, aiming
to overcome current barriers and facilitate a more seamless integration into industrial environments.
1 INTRODUCTION
While there is still no consensus on a concrete def-
inition for a digital twin (Zhang et al., 2021), it is
commonly understood that a digital twin is a virtual
representation of a physical object or system that ac-
curately reflects its real-world counterpart. Initially
defined by IBM to encompass an object’s entire life
cycle, a digital twin is continuously updated with real-
time data. The applications of digital twins include
real-time monitoring, design and planning, optimiza-
tion, maintenance, and remote access. The use of
digital twin technology is expected to grow exponen-
tially in the coming decades (Tao et al., 2022). How-
ever, the current literature on digital twins primarily
focuses on technical approaches, analysis methodolo-
gies, and the challenges associated with data collec-
tion and integration into digital twins (VanDerHorn
and Mahadevan, 2021). Despite these advancements,
there is a notable lack of structured approaches for
creating digital twins and visual representations that
a
https://orcid.org/0009-0008-7886-7081
b
https://orcid.org/0009-0002-0975-272X
c
https://orcid.org/0009-0007-2959-7241
d
https://orcid.org/0000-0002-1057-4273
e
https://orcid.org/0000-0002-9156-9731
foster better understanding and usability of a system
(cf. (Sandkuhl and Stirna, 2020)).
In this paper, we address this challenge by propos-
ing a concept for a model-based digital twin. This
approach allows us to reuse design time artifacts
and highlight system execution, predicted defects,
and other analysis results within the existing arti-
facts. This enables runtime inspection of the digital
twin—and thereby the system monitored—and sup-
ports iterative development and continuous improve-
ment of the robotic application. Reusing conceptual
models from the design phase also has the advantage
as descriptive tools for highlighting data input are al-
ready in existence (Ca
˜
nas et al., 2021).
Therefore, in this paper, we introduce our con-
cept for a model-based digital twin for a collabora-
tive robot used in a manufacturing scenario. By using
standard interfaces of the robot and other monitor-
ing systems and connecting them with current stan-
dard model editors, we can reuse design models for
runtime monitoring and analysis. This contributes to
the enhancement of system development effectiveness
through a model-based digital twin, which facilitates
continuous system improvement and reduces devel-
opment costs by iteratively reusing design artifacts.
This paper is structured as follows: In Section 2,
256
Raja, J. J., Elbishbishy, S., Gutierrez, Y., Mohamed, I., Kranz, P. and Daun, M.
Model-Based Digital Twin for Collaborative Robots.
DOI: 10.5220/0013016400003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 256-263
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

research related to the concept of digital twin archi-
tecture and conceptual modeling, as well as its imple-
mentation in industry automation, is discussed. Sec-
tion 3 introduces the use case to be used through-
out the remainder of the paper. Section 4 introduces
the approach. Finally, Section 5 concludes the paper
along with future work.
2 RELATED WORK
Digital twins replicate real systems in a virtual space
to improve performance through advanced analy-
sis and prediction techniques (Zhang et al., 2021).
Driven by data and models, digital twins can per-
form tasks like monitoring, simulation, prediction,
and optimization (Tao et al., 2022). Specifically, dig-
ital twin modeling is crucial for accurately portray-
ing the physical entity, enabling the digital twin to de-
liver functional services and meet application require-
ments. Challenges include creating reliable models,
ensuring real-time communication, and developing
deep analysis methods (VanDerHorn and Mahadevan,
2021).
However, as Kritzinger et al. (Kritzinger et al.,
2018) noted, the development of digital twins is still
in its initial stages, with literature mainly present-
ing conceptual ideas without concrete case studies.
While digital twin technology has advanced since
Kritzinger’s investigation in 2018, it still requires
more structure and planning to achieve its full poten-
tial (Ramasubramanian et al., 2022). Although there
are many papers on digital twins for manufacturing
systems, there is still insufficient definitive evidence
of digital twin implementation and evaluation in the
industry (Redelinghuys et al., 2020). One reason for
this is the lack of systematic approaches to developing
digital twins (Sandkuhl and Stirna, 2020).
Current approaches like AutomationML(Drath,
2021) and Asset Administration Shell (AAS)(Tantik
and Anderl, 2017) offer frameworks for integrating
various aspects of industrial automation systems. Au-
tomationML, for instance, facilitates the exchange of
plant engineering information, while AAS serves as
a digital representation of an asset’s lifecycle. Our
work differentiates itself from the above-mentioned
approaches by focusing on a model-based digital twin
specifically designed for collaborative robots in man-
ufacturing scenarios.
AutomationML primarily addresses data ex-
change rather than real-time monitoring and dynamic
interaction between physical and virtual entities. In
contrast, our model-based digital twin approach not
only ensures data consistency and integration but also
supports real-time updates and interaction, which are
critical for the continuous improvement of robotic ap-
plications. Similarly, the Asset Administration Shell
(AAS) framework, as part of the Industry 4.0 initia-
tive, provides a robust structure for asset management
as it often requires extensive customization to suit
specific applications and lacks inherent support for
runtime monitoring and predictive analysis tailored to
collaborative robots.
In the industrial domain, there already are model-
based artifacts from the specification and develop-
ment of a system. Models can contain the potential
to depict a system’s functions, structure, or even its
behavior (Davis, 1993). Some existing modeling lan-
guages that have proven useful for modeling robotic
systems are goal models (Mussbacher and Nuttall,
2014) and process models (Petrasch and Hentschke,
2016). The Goal-Oriented Requirements Language
(GRL(ITU Int. Telecommunication Union, 2018))
can be used to elaborate and document the require-
ments of a physical system in the early stages of de-
velopment (Daun et al., 2019; Daun et al., 2021).
Business Process Model and Notation (BPMN), on
the other hand, can play an important role in docu-
menting the operations and requirements of a process
during its operation in industry. Both modeling lan-
guages also contain potential with respect to safety
analysis (Khan et al., 2015).
In previous work, we have successfully extended
the GRL to support early safety assessment of human
robot collaborations (Daun et al., 2023; Manjunath
et al., 2024). As a digital twin is also seen as an im-
portant safety mechanism in the field, we also already
proposed the use of goal models to systematically de-
velop digital twins (cf. (Jesus Raja et al., 2024)). In
this paper, we propose to go one step further, by using
the design time models as runtime models monitored
by the digital twin.
3 RUNNING EXAMPLE
Our case example explores the collaborative dynam-
ics between human operators and cobots in assembly
processes. The assembly process includes operations
ranging from picking and preparing components to
screwing and placing them. In the exemplary pro-
duction process, a toy truck is produced through the
collaboration between a human and a robot. The as-
sembly process is as follows:
1. Cabin (C2) and load carrier (C1) are lying up-
side down in the mounting bracket: Cobot be-
gins by carefully picking the load carrier from
the storage area and positioning it upside down in
Model-Based Digital Twin for Collaborative Robots
257

the collaborative workspace. It then picks up the
cabin and places it in the workspace next to the
load carrier with precision.
2. Chassis (C3) is placed on top: After placing the
structure of the truck (C1 and C2) on the col-
laborative area, the cobot picks up the chassis
and places it carefully with precision on the truck
structure.
3. Screws (C7) are placed inside the axle hold-
ers (C6): While the cobot manages the initial
tasks, the human operator prepares the parts for
screwing by inserting two screws into each axle
holder, repeating this process for all four holders.
The finished product of this process is called sub-
assembly 1. Once the human operator completes
the task, they signal the computer that the work is
finished by pressing a virtual button.
4. Front axle (C4) and rear axle (C5) are aligned
on top of the chassis: The cobot retrieves the
front axle and places it on the chassis, aligning
with the screw’s entries. The cobot securely holds
the front axle in place and waits for the human op-
erator’s intervention. After the completion of sub-
assembly 1, the operator moves to the collabora-
tive area and with the use of the screwdriver then
screws the axle holders, starting with the front
right side, followed by the front left side. After
this process is completed, the human operator sig-
nals the computer through the virtual button that
the work is finished and so, the same process is
again repeated for the rear axle. First, the cobot
picks up the rear axle and then secures it in place
on top of the chassis, aligning it with the holes for
the screws. After that, the human enters the col-
laborative area to screw the axle holder, starting
from the right side.
4 MODEL-BASED DIGITAL TWIN
4.1 Problem Statement
In industrial environments, collaborative robots are
increasingly deployed to enhance productivity and
adaptability. However, current monitoring systems
predominantly rely on basic status updates and data
logging, which provides limited visibility into the
cobots’ real-time operations and interactions with hu-
man operators (Das et al., 2009). These traditional
systems often lack to offer an in-depth, dynamic rep-
resentation of ongoing tasks, making it challenging to
optimize workflows, predict issues, and ensure seam-
less collaboration (Bruno and Antonelli, 2018).
4.2 Solution Idea
To address these limitations, we propose the introduc-
tion of a model-based digital twin for collaborative
robots, represented through detailed conceptual mod-
els that dynamically illustrate the entire process and
highlight the current tasks. This approach leverages
real-time data obtained via the standard robot inter-
face provided by the robot manufacturer. The digital
twin utilizes models created using a standard model
editor. Currently, we are developing the digital twin
mainly for monitoring and real-time analysis, with-
out making changes to the physical twin. ”Digital
shadow” is a more precise term for this one-way flow
of information (Bergs et al., 2021). However, for the
future we plan to develop the digital shadow into a
real digital twin with advanced analysis and the abil-
ity for interventions and adaptations in the physical
twin.
The proposed digital twin will employ BPMN and
GRL goal models to represent different aspects of the
workflow. BPMN models will be used to map out
the entire process flow, detailing each step and deci-
sion point. The reason we choose BPMN is that it
provides a standardized, visual representation of the
workflow, detailing each step of the cobot as it picks,
places and holds components. This clarity facilitates
better communication and process improvement.
Figure 1 shows the basic GRL goal model that
showcases the goals, actors, tasks and dependencies
of the use case introduced in Section 3. The process
for the execution of tasks can be seen in the BPMN
process model shown in Figure 2. The two actors
are the human and the robot, and their tasks are di-
vided based on the parts they handle. This process in-
volves collaborative human-robot interaction, which
can be visualized through dependencies in the GRL
goal model.
Goal models will be employed to focus on spe-
cific objectives and their achievement. Goal models
focus on specific objectives. The advantage of using
these models lies in their ability to enable real-time
progress tracking and decision support, allowing dy-
namic adjustments based on the current state of as-
sembly.
4.3 Architecture
The current concept for creating the model-based dig-
ital twin can be seen in Figure 3 and is described in
detail in the following subsection.
The architecture of the physical twin is shown in
Figure 4. It begins with the complete system, the
‘Spatial Augmented Reality System’, which is later
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
258
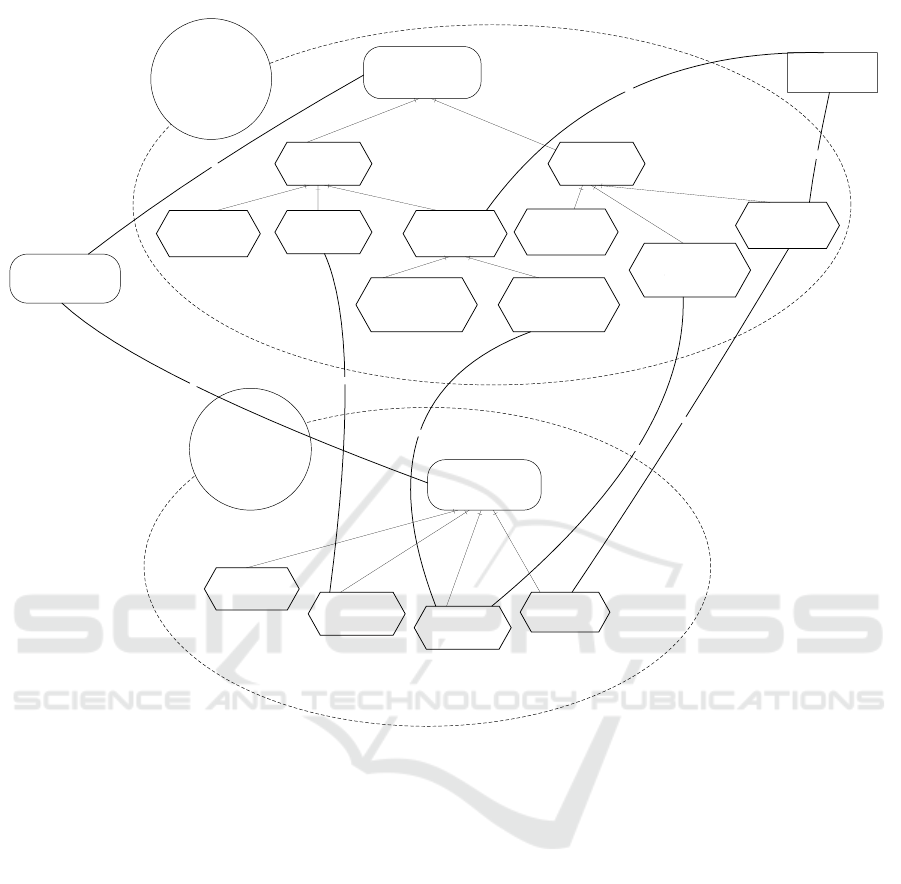
Successfully assemble
toy truck
Mount front axle
holders
Pick 2 prepared
axle holder
Place 2 axle
holder is the given
position
Grab screwdriver
Screw 2 screws to the
left axle holder
Human
Successfully assemble
toy truck
Mount front axle
Robot
Assist during
collaboration
AND
AND
Screw 2 screws to the
right axle holder
Mount rear axle
holders
Pick 2 prepared
axle holder
Place 2 axle holder is the
given position
Grab screwdriver
AND
Screwdriver
D
D
Mount rear axle
D
D
D
D
Successfully
assemble toy truck
D
D
AND
AND
Assemble base
Figure 1: Goal Model of the Truck Assembly use case.
divided into four components: ‘Screwdriver’, ‘Hu-
man Operator’, ‘Monitoring System’, and ‘Cobot’.
The monitoring system consists of a projector and
a camera. This projector contains a depth sensor,
and together with the human operator, it facilitates
Human-Computer communication. The cobot also
includes a control tablet and a torque sensor. The
control tablet, along with the monitoring system, fa-
cilitates Robot-Computer communication. This illus-
trates that there is no direct communication between
the human and the robot but rather through the moni-
toring system.
4.4 Collection of Input and Output Data
Analyzing and understanding the architecture pro-
vides information on the data needed to build the dig-
ital twin. Therefore, the second step (shown in Figure
3) is to collect output data from the cobot and the hu-
man operator for runtime analysis and monitoring. In
our case, we use a Universal Robot with an RTDE
(Real Time Data Exchange) interface to control and
receive data from the cobot. Data from human ac-
tions is collected from a depth sensor integrated with
a virtual green button that the human clicks after each
task. This data, along with RTDE information, must
be processed through the interface and provided to the
models. For now, we only use the information from
the robot for processing and visualizing the models.
4.5 Data Pre-Processing
The data collected from cobot and human operator
can be exported and processed for use in the mod-
els through Python, which is shown as the third step
in Figure 3. A Python adapter software serves as the
interface between the physical twin and the model-
based digital twin. The RTDE interface that was used
to collect the needed data from the cobot can be uti-
lized with Python through the provided Python bind-
Model-Based Digital Twin for Collaborative Robots
259
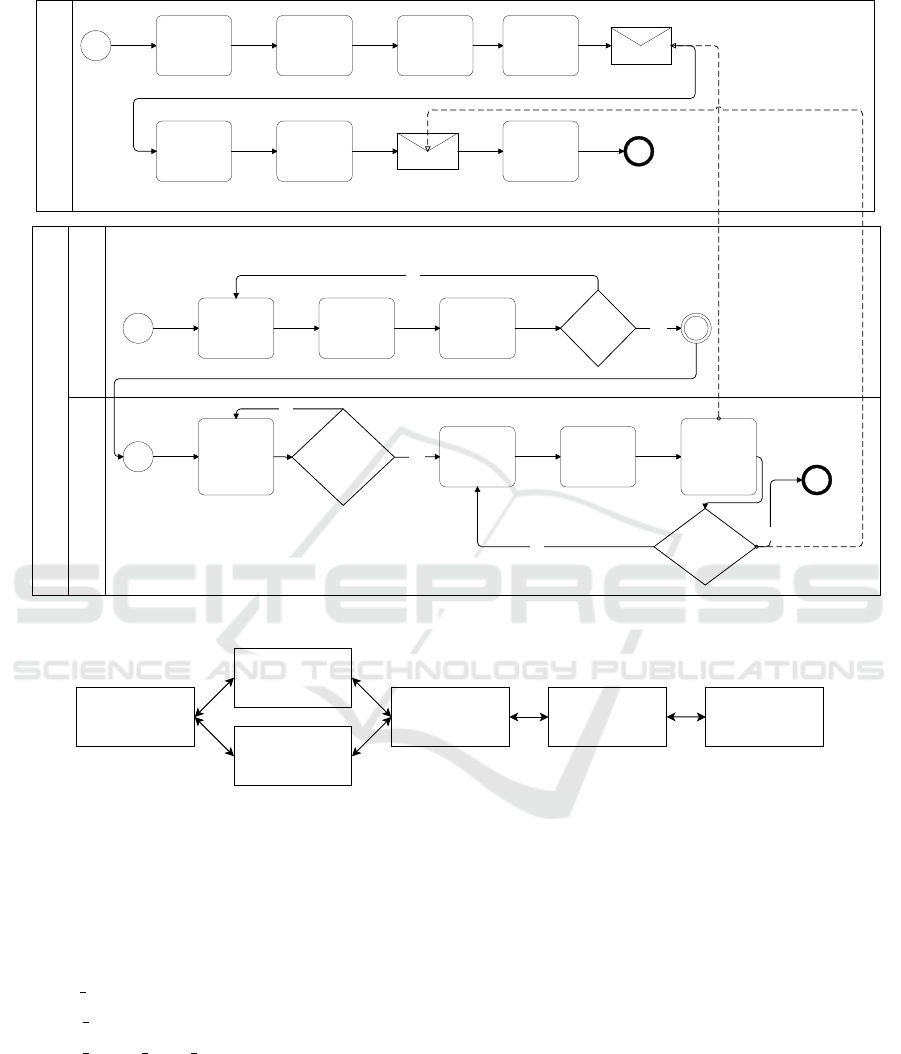
Human Operator
Cobot
Prepare PartsScrew parts through collaboration
Picks and
Place parts
Assemble base
Mount front
axle
Message to continue
the process received
Holds front
axle
Picks and
Places back
axle
Holds back
axle
Message to continue
the process received
Goes back to
initial position
Picking and placing
all parts completed
Picks axle
holder
Holds axle
holder
Puts a screw in
each axle
holder slot
All slots
filled with a
screw?
Yes
No
Picks and
Places
prepped axle
holder
Axle holders
placed?
Yes
Grabs
screwdriver
Screws axle
holders
No
Clicks button
to send the
cobot to
continue the
process
All 4 axle
holders
screwed in?
No
Yes
All 4 axle holders
are screwed in
Figure 2: Business Process Model of the Truck Assembly use case.
Collect Data from
Cobot
Data exchange
format generation
(Microsoft Excel)
Model Highlighting
and Analysis
(Microsoft Visio)
Collect Data from
Depth Sensor
Data Pre-processingPhysical Twin
Figure 3: Concept for developing a model-based digital twin.
ings. The required data from the cobot can be indi-
vidually collected using predefined functions and then
compiled. Some of the data variables that can be col-
lected and used include:
• timestamp
• target q (target position)
• actual q (current position)
• actual digital input bits
Next, the data is exported into a format to be re-
used as standard input by the chosen standard model
editor. In our case, we chose to use Microsoft Visio as
Model Editor, as it is commonly available and acces-
sible in academia and industry.
Therefore, we generate a Microsoft Excel file from
the processed RTDE data, which is then automatically
imported into Microsoft Visio. Using Python and the
RTDE interface, we collect the specified variable, and
with this data, we create two columns in the Excel
document. The first column corresponds to the times-
tamp, and the second column corresponds to the cur-
rent task. The current task is labeled based on the cur-
rent position, and differentiation between human and
robot tasks is achieved using digital input bits. After
extracting the data into the Excel document, it can be
used in Microsoft Visio.
4.6 Model Highlighting
The representation of the models (GRL goal model
and BPMN) is shown in Microsoft Visio. Model
highlighting to show runtime representations can be
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
260
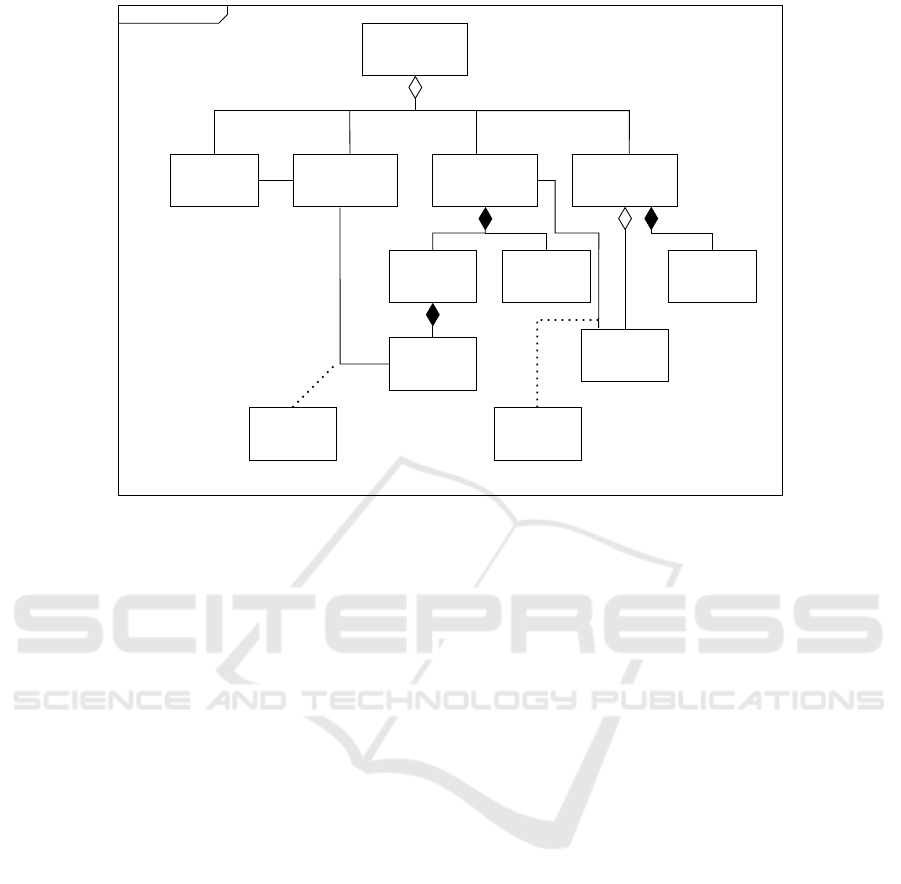
BDD
Spatial augmented
reality system
Collaborative RobotMonitoring systemHuman Operator
CameraProjector
Depth Sensor
Control tablet
Screwdriver
Torque sensor
Cobot-Computer
Communication
Human-Computer
Communication
Figure 4: The architecture of the physical system of the collaborative workspace.
achieved directly in Microsoft Visio using the ‘Link
data to shapes’ function. These shapes are assigned
conditions, and based on those conditions, the cur-
rently implementing task or process can be high-
lighted. This means that the model created fulfills the
properties of a digital shadow. In order to develop
this into a digital twin in our future work, more ad-
vanced analyses can also be directly implemented in
Microsoft Visio using C#-implemented add-ons.
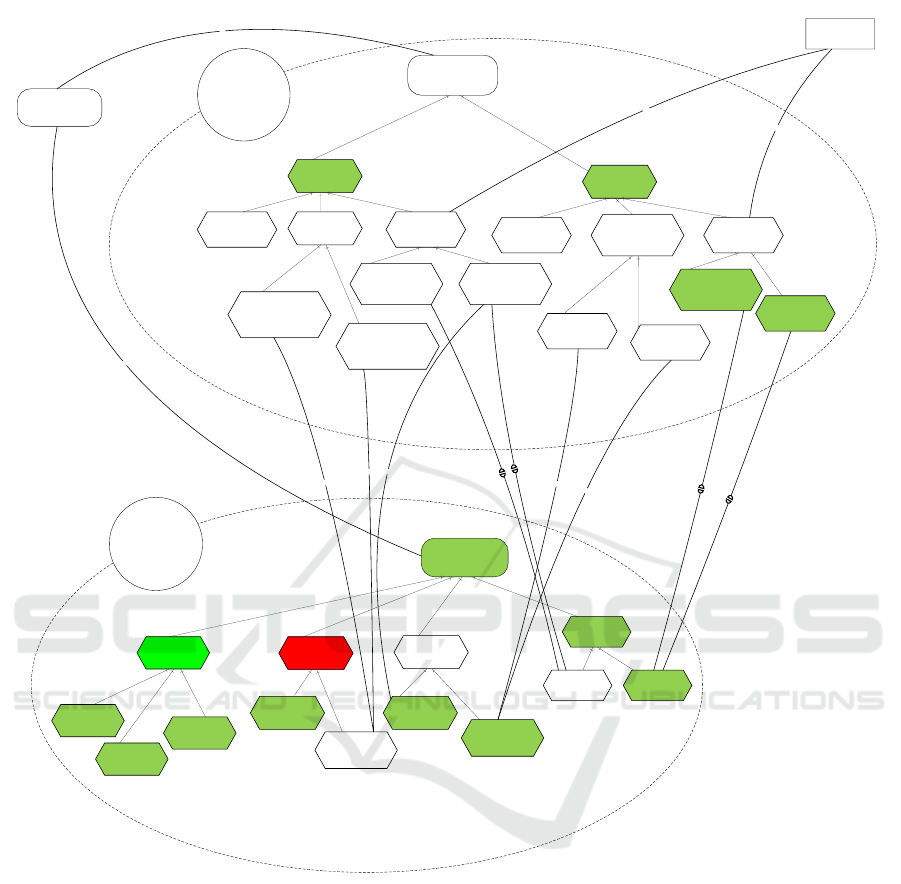
Figure 5 shows how tasks can be highlighted in
the goal model. Here, bidirectional dependencies in-
dicate tasks where both actors are involved and mutu-
ally dependent on each other. For instance, tasks such
as the human performing ‘Screw 2 screws to the right
axle holder’ and the robot holding the ‘rear axle’ are
collaborative and connected by bidirectional depen-
dencies.
Tasks highlighted in green indicate that they are
currently being executed. Other colors can be used
to show different statuses of the tasks, such as ‘com-
pleted,’ ‘waiting,’ and ‘needs attention.’ For example,
the task ‘place one axle holder on the right of the front
axle’ is currently being executed and is highlighted
green. The colors and semantics can be customized
based on the type of process execution and monitor-
ing.
To achieve this, we utilize Visio’s ‘Link Data to
Shapes’ feature. After uploading the Excel document
to the Visio file, this feature allows us to link a cell
to either a main task or a sub-task. By utilizing this
capability, we ensure that the displayed statuses accu-
rately reflect the current state of each task.
Furthermore, the use of colors such as blue, yel-
low, and red serves to signify additional statuses
within the assembly process. These colors provide in-
tuitive visual cues for tasks that are completed, await-
ing action, or requiring attention, thereby enhancing
the overall clarity and effectiveness of process moni-
toring.
Shapes can be connected and highlighted simi-
larly with BPMN. This approach aligns with princi-
ples of re-use and iterative development, leveraging
standardized interfaces and model editors. It allows
for monitoring other assembly processes or general
processes from the cobot with simpler modifications
to the models.
5 CONCLUSION
In conclusion, digital twins offer immense potential to
design, plan, optimize, and monitor systems in real-
time throughout their lifecycle. The development of
a model-based digital twin allows for the replication
of physical system characteristics within a virtual en-
vironment, similar to traditional digital twins. How-
ever, our approach focuses on leveraging model-based
techniques to extend the capabilities of digital twins
for collaborative robots (cobots), providing the ability
to reuse design artifacts. This promotes the iterative
Model-Based Digital Twin for Collaborative Robots
261
Successfully assemble
toy truck
Mount front axle
holders
Pick 2 prepared
axle holder
Place 2 axle
holder is the given
position
Grab screwdriver
Place one axle holder on
the left of front axle
Place one axle holder on
the right of front axle
Screw 2 screws to the
left axle holder
Human
Successfully assemble
toy truck
Mount front axle
Pick front axle
Place front axle in
the front of the
chassis
Pick rear axle
Robot
Place rear axle in
the back of the
chassis
Assist during
collaboration
Hold front axle Hold rear axle
AND
AND
AND
AND
AND
Screw 2 screws to the
right axle holder
Mount rear axle
holders
Pick 2 prepared
axle holder
Place 2 axle holder is the
given position
Grab screwdriver
Place one axle
holder on the left
of rear axle
Place one axle
holder on the right
of rear axle
Screw 2 screws to the
left axle holder
AND
AND
AND
Screw 2 screws to
the right axle
holder
Screwdriver
D
D
Mount rear axle
AND
D
D
D
D
D
D
D
D
D
Successfully
assemble toy truck
D
D
AND
AND
Assemble base
Pick and place
cabin
Pick and place
chassis
Pick and place
load carrier
AND
Figure 5: GRL Goal Model for the truck use case with highlighting.
and continuous development of the system over time.
A key advantage of model-based digital twins is
their ability to enhance understanding during the early
stages of development. By facilitating the early detec-
tion of potential issues, they enable proactive safety
monitoring, improving both efficiency and reliabil-
ity. In this paper, we introduced a model-based digital
twin framework that utilizes GRL (Goal-oriented Re-
quirement Language) goal models and BPMN (Busi-
ness Process Model and Notation). Our approach em-
phasizes reusability by integrating standard interfaces
of cobots and existing industrial systems, as well as
employing widely accepted model editors. This en-
sures efficient integration, reducing development time
and cost while leveraging current technologies and
frameworks.
The contributions of this paper pave the way for
the development of a model-based digital twin that
can be directly implemented in industrial settings. As
part of our future work, we will focus on creating
conceptual models using standard model editors and
evaluating the system with our monitoring implemen-
tation. In addition, we plan to apply different work-
flows and conduct in-depth safety analyses to further
validate the system’s capabilities.
Moving forward, we aim to enhance the func-
tionality of our model-based digital twin by incor-
porating advanced features such as goal reasoning,
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
262

which would allow the system to autonomously ad-
just based on evolving objectives. We also intend to
explore modeling pattern analysis, enabling more effi-
cient reuse of design artifacts across different applica-
tions. These enhancements will not only improve the
twin’s adaptability but also contribute to the broader
adoption of digital twins in complex industrial envi-
ronments.
REFERENCES
Bergs, T., Gierlings, S., Auerbach, T., Klink, A.,
Schraknepper, D., and Augspurger, T. (2021). The
concept of digital twin and digital shadow in manu-
facturing. Procedia CIRP, 101:81–84.
Bruno, G. and Antonelli, D. (2018). Dynamic task classifi-
cation and assignment for the management of human-
robot collaborative teams in workcells. Int. Journal
Advanced Manufacturing Technology, 98:2415–2427.
Ca
˜
nas, H., Mula, J., D
´
ıaz-Madro
˜
nero, M., and Campuzano-
Bolar
´
ın, F. (2021). Implementing industry 4.0
principles. Computers & industrial engineering,
158:107379.
Das, A. N., Popa, D. O., Ballal, P. M., and Lewis, F. L.
(2009). Data-logging and supervisory control in wire-
less sensor networks. Int. Journal of Sensor Networks,
6(1):13–27.
Daun, M., Brings, J., Krajinski, L., Stenkova, V., and
Bandyszak, T. (2021). A grl-compliant istar exten-
sion for collaborative cyber-physical systems. Re-
quirements Engineering, 26(3):325–370.
Daun, M., Manjunath, M., and Jesus Raja, J. (2023). Safety
analysis of human robot collaborations with grl goal
models. In International Conference on Conceptual
Modeling, pages 317–333. Springer.
Daun, M., Stenkova, V., Krajinski, L., Brings, J.,
Bandyszak, T., and Weyer, T. (2019). Goal model-
ing for collaborative groups of cyber-physical systems
with grl: reflections on applicability and limitations
based on two studies conducted in industry. In Pro-
ceedings of the 34th ACM/SIGAPP Symposium on Ap-
plied Computing, pages 1600–1609.
Davis, A. M. (1993). Software requirements: objects, func-
tions, and states. Prentice-Hall, Inc.
Drath, R. (2021). Automationml: A practical guide . Walter
de Gruyter GmbH & Co KG.
ITU Int. Telecommunication Union (2018). Recommenda-
tion itu-t z.151: User Requirements Notation (URN).
Technical report.
Jesus Raja, J., Manjunath, M., and Daun, M. (2024). To-
wards a goal-oriented approach for engineering digital
twins of robotic systems. In ENASE, pages 466–473.
Khan, F., Rathnayaka, S., and Ahmed, S. (2015). Methods
and models in process safety and risk management:
Past, present and future. Process safety and environ-
mental protection, 98:116–147.
Kritzinger, W., Karner, M., Traar, G., Henjes, J., and Sihn,
W. (2018). Digital twin in manufacturing: A cat-
egorical literature review and classification. Ifac-
PapersOnline, 51(11):1016–1022.
Manjunath, M., Raja, J. J., and Daun, M. (2024). Early
model-based safety analysis for collaborative robotic
systems. IEEE Transactions on Automation Science
and Engineering.
Mussbacher, G. and Nuttall, D. (2014). Goal modeling for
sustainability: The case of time. In 2014 IEEE 4th
Int. Model-Driven Requirements Engineering Work-
shop (MoDRE), pages 7–16. IEEE.
Petrasch, R. and Hentschke, R. (2016). Process modeling
for industry 4.0 applications: Towards an industry 4.0
process modeling language and method. In 2016 13th
Int. Joint Conf. on Computer Science and Software
Engineering (JCSSE), pages 1–5. IEEE.
Ramasubramanian, A. K., Mathew, R., Kelly, M., Har-
gaden, V., and Papakostas, N. (2022). Digital twin for
human–robot collaboration in manufacturing: Review
and outlook. Applied Sciences, 12(10):4811.
Redelinghuys, A., Basson, A. H., and Kruger, K. (2020). A
six-layer architecture for the digital twin: a manufac-
turing case study implementation. Journal of Intelli-
gent Manufacturing, 31(6):1383–1402.
Sandkuhl, K. and Stirna, J. (2020). Supporting early phases
of digital twin development with enterprise modeling
and capability management: Requirements from two
industrial cases. In Int. Conf. Business-Process and
Information Systems Modeling, BPMDS, pages 284–
299. Springer.
Tantik, E. and Anderl, R. (2017). Integrated data model and
structure for the asset administration shell in industrie
4.0. Procedia Cirp, 60:86–91.
Tao, F., Xiao, B., Qi, Q., Cheng, J., and Ji, P. (2022). Digital
twin modeling. Journal of Manufacturing Systems,
64:372–389.
VanDerHorn, E. and Mahadevan, S. (2021). Digital twin:
Generalization, characterization and implementation.
Decision support systems, 145:113524.
Zhang, L., Zhou, L., and Horn, B. K. (2021). Building a
right digital twin with model engineering. Journal of
Manufacturing Systems, 59:151–164.
Model-Based Digital Twin for Collaborative Robots
263
