
Multi-Modal Deep Learning Architecture Based on Edge-Featured
Graph Attention Network for Lane Change Prediction
Petrit Rama
a
and Naim Bajcinca
b
Department of Mechanical and Process Engineering, Rheinland-Pf
¨
alzische Technische Universit
¨
at Kaiserslautern-Landau,
Gottileb-Daimler-Straße 42, 67663 Kaiserslautern, Germany
Keywords:
Lane Change, Maneuver Prediction, Deep Learning, Graph Neural Network, Autonomous Driving.
Abstract:
Maneuver prediction, especially lane change maneuver, is of critical importance for the safe navigation of au-
tonomous vehicles. Although benchmark datasets exist for trajectory prediction, datasets specifically tailored
for maneuver prediction are rare. This is particularly true for lane change prediction. To address this gap, in
the present paper, an instrumented test vehicle is used to collect, process and label lane change maneuvers
across various traffic scenes. The resulting dataset, referred to as WylonSet, consists of front-facing camera
images, area-view camera images, vehicle state data and lane information. Thereby, over 400 driving sessions
are collected and labeled, including approximately 500 lane change maneuvers, laying the foundation for our
study. The main motivation behind this work is to analyze and predict lane change maneuvers for the ego-
vehicle in urban traffic scenarios using deep learning models. In this study, a novel multi-modal deep learning
architecture is proposed, comprising different modules to extract important features from the collected data.
The visual module is built using Convolutional Neural Networks (CNNs) to capture features from all camera
images, while the interaction module utilizes Graph Neural Networks (GNNs) to capture spatial features be-
tween detected entities in the traffic scene. The state module utilizes vehicle state data, while the lane module
utilizes lane features. All these features are tracked in time using the temporal module of Recurrent Neural
Networks (RNNs). The proposed architecture is trained and validated on WylonSet. Finally, the proposed
learning architecture is implemented, and the resulting model for lane change prediction of the ego-vehicle is
evaluated in different driving scenes and traffic densities.
1 INTRODUCTION
Human driving is inherently hierarchical, aligned
with discrete decision-making layers that correspond
to specific maneuvers such as lane changing, overtak-
ing and lane keeping. Incorporating this hierarchical
structure into machine driving allows more manage-
able solutions to the complex problem of autonomous
driving. Consequently, lane change prediction be-
comes more challenging due to the uncertainty in the
control policies of individual agents. Navigating traf-
fic environments, is inherently feedback-structured,
enabling the ego-vehicle and other vehicles to reduce
the likelihood of collisions by adjusting their speed
and position accordingly. This demands modeling ap-
proaches that consider holistic understanding of envi-
ronments and the awareness of interactions among the
involved traffic agents. Thus, anticipating and recom-
a
https://orcid.org/0000-0003-3925-7869
b
https://orcid.org/0000-0002-1660-4859
mending lane change maneuvers can improve traffic
safety by allowing vehicles to proactively respond to
potentially dangerous situations.
Autonomous driving encompasses various tasks
including object detection, semantic segmentation,
scene understanding, maneuver planning, trajectory
prediction and vehicle control. While benchmark
datasets are available for many of these tasks (Geiger
et al., 2013; Cordts et al., 2016; Yu et al., 2018; Huang
et al., 2018), maneuver planning datasets are rare and
often not specifically tailored for high-level maneu-
ver prediction. This rarity extends to lane change ma-
neuvers too, where processing trajectories and other
motion cues is required to infer such driving maneu-
vers. Explicitly labeled maneuvers are provided for
intention prediction in the BLVD dataset (Xue et al.,
2019), and learn driver behaviors in the HDD dataset
(Ramanishka et al., 2018). However, lane change ma-
neuvers are limited in number in both datasets and not
sufficient to comprehensively understand lane change
282
Rama, P. and Bajcinca, N.
Multi-Modal Deep Learning Architecture Based on Edge-Featured Graph Attention Network for Lane Change Prediction.
DOI: 10.5220/0013019200003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 282-289
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

behaviors across different traffic scenes. To address
this gap, in the present work, an instrumented test
vehicle is utilized to collect, process and label lane
change maneuvers in various traffic scenarios. The in-
troduced dataset, named WylonSet, consists of high-
resolution front-facing camera and area-view camera
images, vehicle state data and lane information. It
serves as a foundation for our study, to analyze and
predict lane change behaviors using deep learning
models in different traffic scenarios.
Generally, the research landscape of lane change
prediction is dominated by deep learning models,
mainly due to the availability of data and advance-
ments in hardware capabilities. Lee et al. (Lee et al.,
2017) proposes a novel framework that first builds a
bird’s-eye view of the traffic scene and utilizes Convo-
lutional Neural Networks (CNNs) to perceive it, en-
abling lane change prediction for surrounding vehi-
cles, including left cut-ins, right cut-ins or lane keep
maneuvers. Wei et al. (Wei et al., 2019) introduces an
end-to-end lane change behavior detection model us-
ing the front-facing camera images and Inertial Mea-
surement Unit (IMU) data, leveraging Deep Residual
Neural Network. The paper (Izquierdo et al., 2021)
proposes an architecture based on CNNs to detect and
predict lane change and lane keep maneuvers, based
on vehicle motion histories, the environment context
and the interaction between traffic agents.
Another class of models that is relevant to the
present paper are Graph Neural Networks (GNN).
Graph models are used widely in maneuver predic-
tion, recently including lane change prediction. The
main reasons that graph structures gained attention
are because of their versatility to accommodate di-
verse sets of detected entities and their adaptable
structures within various deep learning architectures.
But, mainly, graphs inherently capture interactive fea-
tures, making them well-suited for interaction-aware
approaches. These approaches are crucial for motion
prediction systems, where the movement of each par-
ticipant significantly impacts the movement of others.
GNNs have emerged as powerful models to capture
the spatial interaction within such graphs. Adopting
GNNs for modeling traffic scenes as graphs has been
empirically proved to increase the accuracy of trajec-
tory prediction by Diehl et al. in (Diehl et al., 2019).
GRIP (Li et al., 2019) represents the interaction be-
tween traffic agents in the form of a graph, using
GNNs to capture spatial features to predict trajecto-
ries for observed agents, not lane change maneuvers.
Similarly, Pan et al. (Pan et al., 2020) proposes an
architecture based on GNNs, Long Short-Term Mem-
ory networks and attention mechanism to model the
problem as a spatio-temporal graph and predict lane
change trajectories. Liang et al. (Liang et al., 2020)
encodes the map as a graph, and uses graph convolu-
tions to capture complex topological dependencies, to
predict multi-modal trajectories.
The present paper extends the research conducted
in (Rama and Bajc¸inca, 2022; Rama and Bajc¸inca,
2023) by introducing a dataset and a multi-modal
deep learning architecture designed for analyzing and
predicting lane changes of ego-vehicles. The archi-
tecture incorporates visual, interaction, state, lane
and temporal features. Visual features and detected
entities from the traffic scene are extracted using
CNNs from camera images. Adopting an interaction-
aware approach, the architecture models spatial inter-
actions among these detected traffic entities as scene
graphs, whereby nodes represent detected traffic en-
tities, while edges represent the relative interaction
among them. Such graphs serve as inputs of GNNs
for learning spatial features. Finally, vehicles state
data and lane information, with features extracted
from the aforementioned modules, are tracked in time
using Recurrent Neural Networks (RNNs), enabling
the capture of temporal dynamics relevant to lane
change maneuver classification. The main contribu-
tions of the paper include:
• Utilizing surround area-view cameras to extract
visual features and detect diverse traffic entities,
modeling the surrounding view of the ego-vehicle
and the interaction as one large scene graph;
• Proposal of a novel multi-modal deep learning ar-
chitecture based on CNNs, GNNs and RNNs, and
conducting an ablation study to analyze the im-
pact of each module on lane change predictions;
• Optimizing the utilization of sparse visual fea-
tures of interaction graphs for scrutinizing and en-
hancing the accuracy of the lane change maneuver
prediction in different traffic scenarios.
2 METHODOLOGY
The decision-making process in urban environments
is highly interactive, influenced by surrounding traf-
fic agents, vehicle dynamics and lane information.
Given these complexities, the methodology proposed
in this work follows a multi-modal feature extraction
approach from various inputs. These modalities in-
clude the visual, interaction, state, lane and tempo-
ral modules. Assuming the goal maneuver from the
global path planning module is to drive straight, the
aim is to predict lane keep, left lane change or right
lane change maneuvers based on the aforementioned
input features and traffic constraints.
Multi-Modal Deep Learning Architecture Based on Edge-Featured Graph Attention Network for Lane Change Prediction
283

The system detects visual information and fea-
tures of traffic entities using a state-of-the-art com-
puter vision algorithm, deployed on the front-facing
camera and area-view cameras. The visual features
captured by all cameras provide a visual perspective
of the nearby detected entities. YOLOv7 (Wang et al.,
2022), pre-trained on the COCO (Lin et al., 2014) is
employed to detect entities and extract visual features.
This work adopts an interaction-aware motion
model by representing the problem as an interaction
scene graph. A graph is built for every image frame
captured by the cameras, whereby nodes represent
detected entities, while the edges represent the rela-
tive spatial distance in the image space between en-
tities. Separate graphs generated from each camera
are merged, with the ego-node serving as the common
node. Graph modeling offers the flexibility to treat the
problem as a dynamic system by adding or removing
nodes, edges and features, to reflect the varying num-
bers of detected agents during driving.
The vehicle’s state data and lane information ob-
tained from the CAN bus are also used as input, pro-
viding the insights of the internal dynamics of the
ego-vehicle and the road structure. They include sig-
nal data for the steering, acceleration, braking, yaw, as
well as lane markings, their type and color, curvature,
offset, etc. These inputs, combined with visual and in-
teraction features, are tracked in time over a specific
time-window, providing the navigation module of the
ego-vehicle with comprehensive data to make the fi-
nal decision, which includes Left Lane Change (LLC),
Lane Keep (LK) and Right Lane Change (RLC).
2.1 Problem Formulation
The model receives historical sequences from front-
facing and area-view cameras, interaction graphs, ve-
hicle state data and lane features as inputs. These se-
quences are observed for t = [−T
tw
: 0], where T
tw
is
the observation time. The objective is to predict the
output probability distribution y at t + T
p
for maneu-
vers {LLC, LK, RLC} of the ego-vehicle, where T
p
represents the prediction time step in the future.
The traffic scene is modeled as an interaction
graph G
(t)
= (V
(t)
,E
(t)
,X
(t)
V
,X
(t)
E
), for timestep t.
The node set V represents n detected traffic entities,
with n + 1 total nodes in the traffic graph, where the
additional node represents the ego-vehicle. The edge
set E encodes the inverse Euclidean distance between
centerpoints of detected entities in image space, so
that entities closer to the ego-vehicle have a stronger
influence on lane change prediction. The feature vec-
tor of the entire node set is denoted as X
V
, while the
feature vector of the entire edge set as X
E
.
2.2 Model Architecture
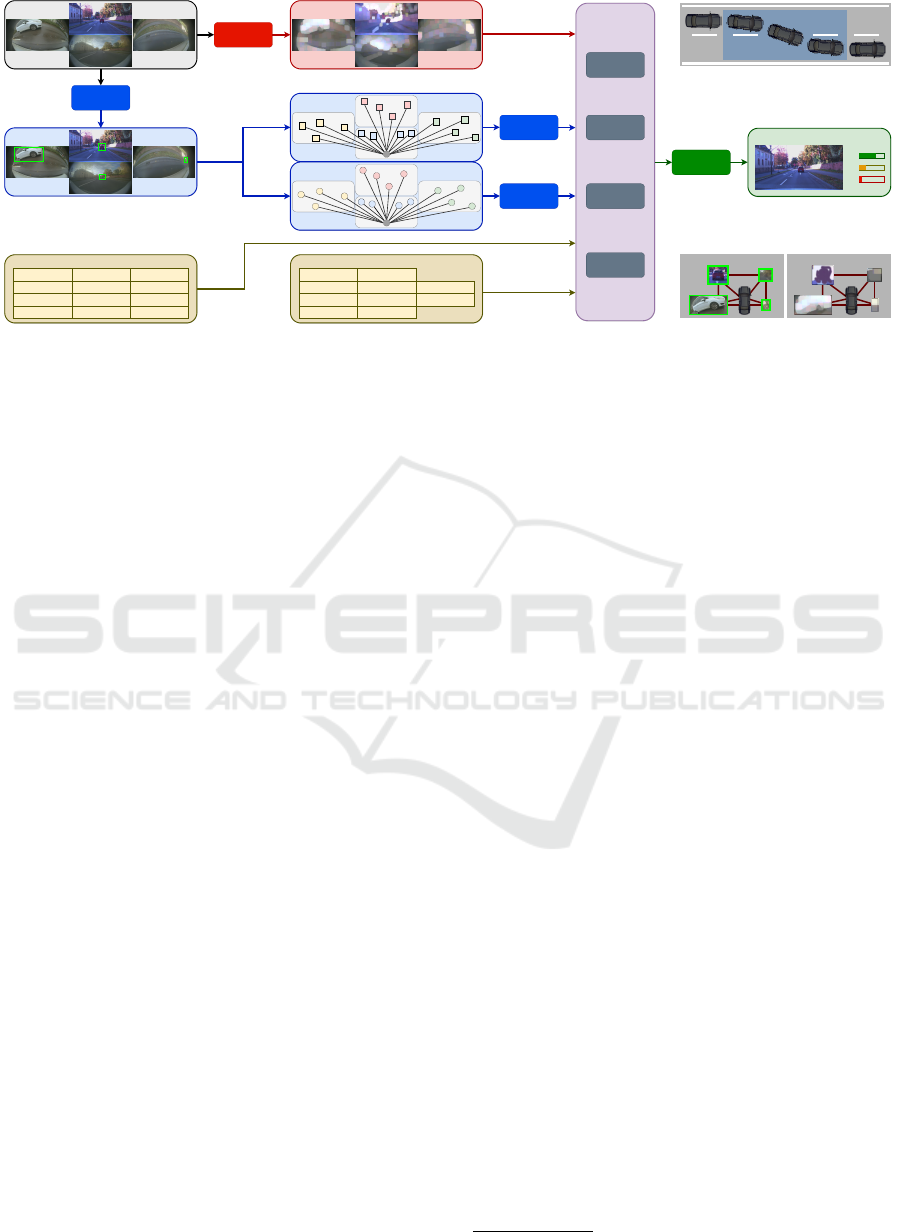
The proposed deep learning architecture is shown in
Fig. 1. The architecture is multi-modal and considers
current inputs of visual, spatial, vehicle state data and
lane information, together with past observations of
these inputs for predicting lane change maneuvers.
First, image frames I
(t)
of timestep t from all cam-
eras pass through multiple CNN layers for feature ex-
traction, providing the architecture with visual infor-
mation of the surrounding traffic. Visual features are
tracked in time-window T
tw
using the module RNN
v
:
v
(t)
= CNN
I
(t)
, H
(t)
v
= RNN
v
v
(t)
,H
(t−1)
v
, (1)
where H
(t)
v
is the output of the RNN
v
at timestep t.
The same image frames I
(t)
are passed through
YOLOv7 (Wang et al., 2022) algorithm to detect traf-
fic entities and extract sparse visual features from the
traffic environment. Two different interaction graphs
are constructed, as shown in bottom-right part of Fig.
1. BBox graph G
(t)
b
is created using bounding box
information as node features, wherein each node i in
the graph G
(t)
b
corresponds to only one detected ob-
jects and it’s features f
i
, as described below:
f
i
= [x
i
,y
i
,w
i
,h
i
,a
i
,c
i
], (2)
where x, y are the centerpoint coordinates, w,h are
width and height of the bounding box in pixels, a
is the detection confidence and c is the class of the
detected entity. Contrarily, patch graph G
(t)
p
is built
with the same structure as the BBox graph, but it
uses the extracted visual features from the last layer
of YOLOv7 as node features. These graphs are then
passed through separate GNN modules to capture in-
teractive features from separate graphs:
g
(t)
b
= GNN
b
G
(t)
b
, g
(t)
p
= GNN
p
G
(t)
p
. (3)
The ego-vehicle is represented in the interaction
graphs as the ego-node, capturing the spatial interac-
tive features from all nodes in the graph at timestep
t. The output embedding of the ego-node g
(t)
b
0
is ex-
tracted from the transformed graph g
(t)
b
, while the em-
bedding of ego-node g
(t)
p
0
is extracted from the trans-
formed graph g
(t)
p
. These two vector embeddings and
observed over time-window T
tw
using the interaction
module RNN
g
, similar to Eq. (1).
Vehicle state data s
(t)
and lane features l
(t)
at
timestep t are also tracked over observed time-
window T
tw
, using the respective RNN modules:
H
(t)
s
= RNN
s
s
(t)
,H
(t−1)
s
, (4)
H
(t)
l
= RNN
l
l
(t)
,H
(t−1)
l
. (5)
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
284
CNN
Feature Extraction
CNN
Object Detection
Camera Images Visual Features
Object Detections
Patch Graph
BBox Graph
(1) (2)
(3)
(4)
(5)
Vehicle's State Data
Velocity
Long. Acceleration
Lat. Acceleration
Yaw Rate
Wheel Angle
Wheel Angle Sign
Wheel Speed Sign
Wheel Speed
Brake Pressure
Throttle Pedal Pos.
LDW Time Line
LDW Dist. Line
(6) Lane Information (7)
Yaw Angle
Offset Lat.
Curvature Rate
Curvature
Offset Long.
Max Dist. Long.
Type
Color
Number of Lanes
Lane
GNN
Detection Node Feature
GNN
Patch Node Feature
RNN
Visual Features
RNN
Interaction Features
RNN
Lane Features
RNN
State Features
Time [-T
tw
:0] (8)
FC
Classification Layer
Lane Change Prediction
(9)
RLC
Lane Change Maneuver
LLC
LK
BBox Graph
Patch Graph
Figure 1: Network architecture of the proposed model for lane change prediction, (top-right) labeled lane change maneuver,
and (bottom-right) interaction graphs of the detected bounding boxes and extracted visual features.
The hidden latent representation from all afore-
mentioned modules, namely H
(t)
v
, H
(t)
g
, H
(t)
s
and
H
(t)
l
at timestep t are concatenated and passed
through a fully-connected classification layers FC(·):
H
(t)
f c
= FC
H
(t)
v
∥H
(t)
g
∥H
(t)
s
∥H
(t)
l
. (6)
The output representation H
(t)
f c
of the network is
used to train the model in a supervised fashion to pre-
dict {LLC, LK, RLC} of the ego-vehicle at t + T
p
.
3 EXPERIMENTS
Experiments were conducted on a desktop: Ubuntu
18.04 with 2.2GHz Intel(R) Xeon(R) CPU E5-2698
v4, 256 GB RAM, Tesla V100-DGXS-32GB.
3.1 Dataset
For the present work, the in-house dataset WylonSet,
which is specifically tailored for lane change maneu-
vers, has been collected utilizing an instrumented test
vehicle. Drivers were instructed to drive normally,
while adhering to traffic rules, signs, and speed limits.
They were primarily directed to drive straight in all
scenarios and avoid executing other turning maneu-
vers. Driving straight was also assumed as the goal to
train the proposed deep learning model.
The dataset has been collected in various parts
of the city of Kaiserslautern, in Germany, between
October 2023 and February 2024, featuring diverse
lane information, traffic densities and weather con-
ditions. The dataset includes high-resolution front-
facing camera images (30Hz with a resolution of
2048×864 pixels), area-view camera images (15Hz,
1280×800), vehicle state data and lane information
obtained from the CAN bus. The motion of the ego-
vehicle is measured using the IMU, which records
brake pressure, velocity, acceleration, yaw rate and
steering wheel, among others. In addition, the CAN
provides information about the lane markings, includ-
ing yaw angle, latitudinal/longitudinal offset, curva-
ture, and the type and color of the markings.
WylonSet has initially been preprocessed to en-
sure proper structuring for lane change behavior anal-
ysis. Sessions that contained missing or corrupt infor-
mation were removed to ensure data integrity. Times-
tamps from front-facing camera images serve as the
master clock for synchronizing area-view cameras,
vehicle state data and lane features. Timestamping
is performed using the RTMaps
1
.
After processing and labeling, more than 400 driv-
ing sessions were obtained, with nearly 3 hours of
driving videos and around 250,000 front-facing image
frames. The dataset includes 315 right lane change
maneuvers and 175 left lane change maneuvers. The
density distribution and histogram of the main input
data are shown in Fig. 2. The velocity distribution
centers around 50 − 60km/h, reflecting typical driv-
ing speeds for urban and rural areas. This is also ev-
ident in Fig. 2b, showing a dominance of roads with
two lanes. The Fig. 2c shows the specific lane driven
by the ego-vehicle, with lane numbering from right
to left. Lastly, in Fig. 2d, the histogram of the left
lane marking type is shown, where: 0 is “no line”, 1
is “solid”, 2 is “dashed”, 3 is “sidewalk”, 4 is “grass”,
5 is “bot-dots”, 6 is “unknown” and 7 is “error”. The
histogram for the types of right lane markings are very
similar to those for the left lane markings.
Lane change maneuvers are labeled using turn in-
dicators that mark the start and end of the lane change.
As shown in the top-right part of Fig. 1, the turn indi-
1
https://intempora.com/products/rtmaps/
Multi-Modal Deep Learning Architecture Based on Edge-Featured Graph Attention Network for Lane Change Prediction
285
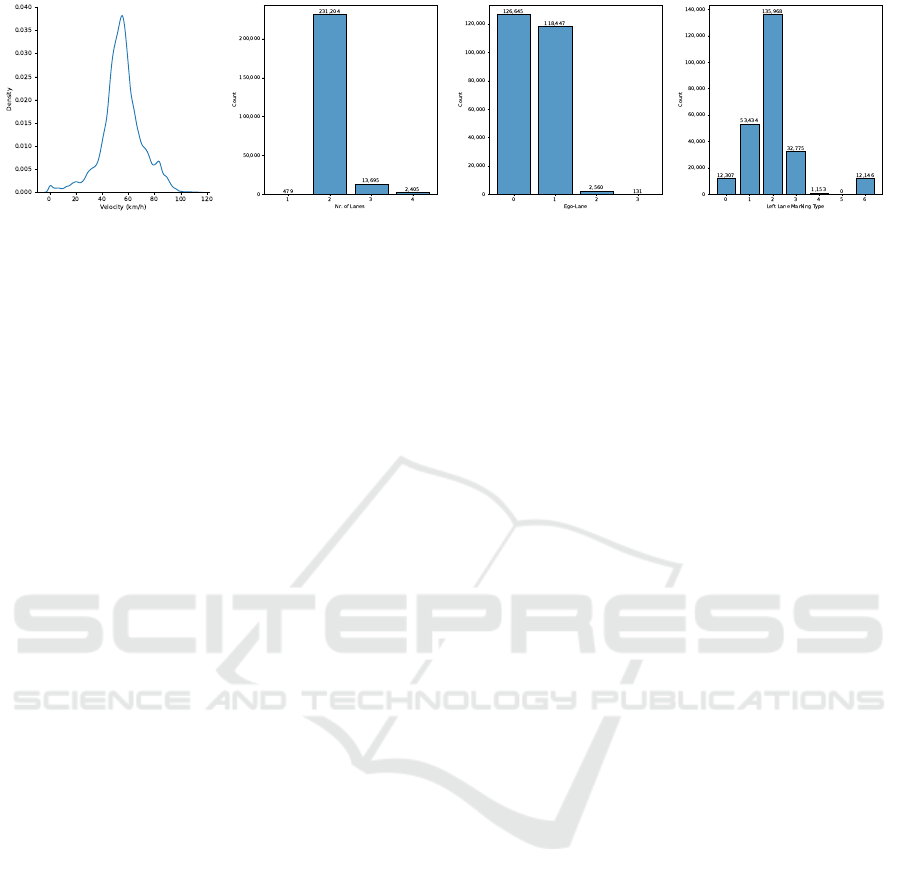
(a) (b) (c) (d)
Figure 2: Density distribution of ego-vehicle data from CAN bus for (a) velocity. Histogram of (b) number of lanes in driven
roads, (c) lane where ego-vehicle was driving (0 is the right-most lane), and (d) left lane marking type.
cator signal is initiated when the vehicle is in the lat-
eral middle of the ego-lane and starts the movement
towards the next lane, coinciding with the rotation of
the steering wheel. The turn indicator is stopped, once
the vehicle reaches the lateral middle of the next lane,
completing of the lane change.
3.2 Model Implementation
The image frames are processed by the visual mod-
ule V of the proposed architecture, implemented us-
ing CNNs. Frames from the front-facing camera and
area-view cameras are resized to 256 × 128 pixels be-
fore feeding them into a two-layer 2D convolution to
extract visual features from each frame of raw images.
Each convolution layer uses a kernel size of 5 and is
followed by a 2D max pooling layer with a kernel size
of 2 and a stride of 2. The network employs the ReLU
activation function, a 0.2 dropout value and 32 hid-
den units per layer. The hidden visual representation
is then flattened and passed through a linear layer to
obtain the output visual representation for each frame.
The same image frames from all four cameras are
also utilized for sparse visual extraction. YOLOv7,
pre-trained on the COCO dataset (Lin et al., 2014), is
employed to detect entities in a traffic scene. The de-
tected sparse features are employed to construct the
respective scene graphs. The BBox graph is con-
structed using the detected bounding box information
inferred from YOLOv7, illustrated as the first graph
in the bottom-right part of Fig. 1. Such graphs are
enriched with node and edge features as described in
Sec. 2.2, and are processed by the first interaction
module I
b
. Contrarily, the patch graph is constructed
using the last feature layer of YOLOv7, by extracting
the inner parts of detected entities based on the bound-
ing box coordinates, illustrated as the second graph in
the bottom-right part of Fig. 1. Patches of hidden
visual representation are first resized to 16 × 16 pix-
els, passed through a CNN layer with a kernel size
of 4, followed by a max pooling layer with a kernel
size of 2 and stride 2. The hidden representations are
flattened and passed through a linear layer to produce
node features. The edge features in this graph remain
the same as in the BBox graph, encoding the inverse
Euclidean distance. The patch graph is processed by
the second interaction module I
p
. Both graphs model
the spatial interaction among entities, but with differ-
ent visual features as node features. Each interaction
module is implemented as a two-layer Edge-Featured
Graph Attention Network (Wang et al., 2021).
The vehicle state values are processed by the state
module S, while lane features are processed by the
lane module L. Continuous values from vehicle state
data and lane features are scaled between 0 and 1.
Categorical values from vehicle state data and lane
features are one-hot vector encoded. This processing
step enables the integration of these features, feeding
them directly into the temporal module.
The temporal module T tracks the hidden rep-
resentations from each module, implemented using
Gated Recurrent Units (GRUs). Separate GRUs are
implemented for each module: GRU
v
for visual fea-
tures, GRU
g
for interaction graphs, GRU
s
for vehicle
state data and GRU
l
for lane features. Each GRU con-
sists of a single layer with 32 hidden units and no
dropout regularization. Such modules allow the archi-
tecture to capture temporal dependencies in the input.
All output features from the temporal modules are
concatenated. Subsequently, they are passed through
a classification layer, which is implemented as a two-
layer Fully Connected (FC) network with 32 hidden
units per layer. The first FC layer applies a ReLU
activation function, and the second FC layer produces
the final classification, generating predictions for lane
change maneuvers based on fused input features.
All input data are synchronized based on the front-
facing camera images, which are captured at a rate of
30 frames per second. A single frame was used as a
sampling step, resulting in a sampling rate of 1/30 of
a second. For the experiments, the input data are pre-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
286

Table 1: Main results show the impact of number of ses-
sions in the performance of the trained model.
Sess. Seq. Acc F1-S ROC-S
75 ≈ 21.000 76.32% 76.30% 78.24%
120 ≈ 44.000 84.86% 84.88% 86.90%
175 ≈ 64.000 88.15% 88.13% 90.61%
240 ≈ 82.000 91.35% 91.37% 93.52%
pared as ordered sequences, with a sampling step of
4 and an observation time-window of T
tw
= 15. This
means that every fourth front frame, along with syn-
chronized camera frames, state data and lane values,
are taken to build a 15-timestep sequence of input.
The dataset is randomly split in 70% for train-
ing and 30% for validation. The architecture is im-
plemented in Python, PyTorch (Paszke et al., 2019)
and Deep Graph Library (DGL) (Wang et al., 2019).
Adam optimizer is used with a learning rate of 0.001
and L2 regularization of 0.0001. The model is trained
as a supervised classification task, minimizing the
cross-entropy loss between the predicted outputs and
labels. The model is evaluated using accuracy (Acc),
F1 score (F1-S), ROC score (ROC-S). Moreover, the
model is evaluated using per-class precision (P), re-
call (R), F1 score (F1-S), for three maneuver classes.
4 RESULTS
4.1 Main Results
The performance of the proposed model was evalu-
ated on the WylonSet dataset. To facilitate hyperpa-
rameter tuning and examine the impact of dataset size
on model performance, the dataset was incrementally
enlarged, and the model was retrained and validated
at each step. The results are summarized in Table 1,
showing that increasing the dataset size led to a steady
improvement in performance metrics. With 240 ses-
sions (approx. 82,000 sequences), the model achieved
an accuracy of 91.35%, an F1-score of 91.37% and a
ROC score of 93.52%. While increasing the dataset
size improved performance, the marginal gain dimin-
ished as the dataset grew, at the cost of longer pro-
cessing, training, and evaluation times.
4.2 Ablation Study
To better understand and interpret the contribution of
each module to the model’s performance and analyze
the problem of lane change maneuver prediction from
different modalities, an ablation study was conducted.
Modules are denoted as in the previous sections: V
is the visual module, I
b
the interaction module with
Table 2: Ablation results show the impact and contribution
of each module in the performance of the trained model.
Average
Acc F1-S ROC-S
V · I
b
I
p
· S · L · T 91.35% 91.37% 93.52%
I
b
I
p
· S · L · T 92.39% 92.40% 94.29%
V · I
b
· S · L · T 91.62% 91.63% 93.72%
V · I
p
· S · L · T 91.67% 91.67% 93.75%
V · S · L · T 89.63% 89.65% 92.22%
V · I
b
I
p
· L · T 87.00% 87.00% 90.25%
V · I
b
I
p
· S · T 85.13% 85.15% 88.85%
bounding boxes, I
p
the interaction module with de-
tection patches, S is the state module, L is the lane
module and T is the temporal module. The results of
this study, shown in Table 2, are based on experiments
carried out on more than 100.000 sequences (≈ 55%
for the LK, ≈ 25% for LLC, and ≈ 20% for RLC).
The architecture with all modules [V ·I
b
I
p
·S ·L ·T]
is used as a baseline model, which based on the val-
idation results of 91.35% accuracy (in italic), is sur-
prisingly not the best performing model. The visual
module is a crucial module for decision-making, yet
the model without the visual module outperformed
the baseline model, with an accuracy of 92.39% (in
bold). This improvement can be attributed to the fact
that enough visual features are effectively encapsu-
lated in the traffic graphs, which also integrate spa-
tial interactions through their edges. Removing one of
the interaction graphs slightly improved the results to
91.62% and 91.67%, respectively. However, remov-
ing both interaction graphs led to a more significant
drop in performance, reducing accuracy to 89.63%
(in underline). The largest decrease in performance
occurred when the state or lane modules were re-
moved, resulting in accuracy of 87.00% and 85.13%,
respectively, highlighting their crucial role in accurate
lane change prediction for the ego-vehicle.
To evaluate the model’s performance across differ-
ent lane change maneuvers, precision (P), recall (R)
and F1-score (F1 − S) were calculated for each class:
LLC, LK and RLC. The detailed results are provided
in Table 3. Generally, the LK maneuver achieves a
higher F1 score compared to RLC and LLC, with an
F1-score of 92.08%. The differences are not sub-
stantial, suggesting relatively balanced performance
across all maneuvers. For RLC and LLC, the model
achieved F1-scores of 90.93% and 90.19%, respec-
tively. Conversely, recall values generally tend to be
higher for RLC, and was particularly high (95.28%) in
the model without the visual module, showing that the
model is highly sensitive to RLC despite fewer data
points. Lastly, RLC precision varied significantly de-
pending on the inclusion of interaction modules.
Multi-Modal Deep Learning Architecture Based on Edge-Featured Graph Attention Network for Lane Change Prediction
287

Table 3: Ablation results show the impact and contribution of each module in the per-class performance of the trained model.
Left Lane Change Lane Keep Right Lane Change
P R F1-S P R F1-S P R F1-S
V · I
b
I
p
· S · L · T 87.97% 92.51% 90.19% 93.22% 90.97% 92.08% 91.03% 90.82% 90.93%
I
b
I
p
· S · L · T 92.73% 90.22% 91.46% 93.38% 91.94% 92.66% 88.32% 95.28% 91.67%
V · I
b
· S · L · T 88.28% 92.43% 90.31% 92.12% 92.14% 92.13% 94.11% 87.91% 90.90%
V · I
p
· S · L · T 90.11% 91.18% 90.64% 93.30% 91.21% 92.24% 89.42% 93.66% 91.49%
V · S · L · T 87.31% 88.49% 87.89% 92.25% 88.86% 90.52% 85.79% 93.32% 89.40%
V · I
b
I
p
· L · T 85.50% 83.97% 84.73% 88.11% 87.70% 87.90% 86.04% 89.25% 87.61%
V · I
b
I
p
· S · T 87.61% 75.01% 80.82% 87.13% 89.09% 88.10% 75.32% 85.14% 79.93%
Date:
Time:
Fame:
Model:
Nr. Lanes:
Ego-lane:
20231031
145818
000364
EGAT
2
0
Velocity
Lat. Acceler.
Long. Acceler.
Yaw Rate
Wheel Angle
Wheel Speed
Brake Pressure
Throttle Pedal
LDW Time Line
LDW Dist. Line
Sensor
46.96
0.01
-0.3125
0.19
2.20
5.00
0.00
2.40
1.20
0.46
Value
Yaw Angle
Offset Lat.
Offset Long.
Curvature
Curvature Rate
Max. Dist. Long.
Lane
-0.027832
1.402344
0.0000
0.000153
0.001977
26.75
Left
Yaw Angle
Offset Lat.
Offset Long.
Curvature
Curvature Rate
Max. Dist. Long.
Lane
-0.039551
-2.050781
0.0000
0.000183
0.001981
27.25
Right
Detected Lane Markings Detected Lane Markings
Right
Right Right
Left Left Left
LLC LK RLC
Figure 3: Visualization of model inference for lane change prediction.
4.3 Scenario Visualization
A qualitative evaluation of the model’s predictions
was performed using visualizations from selected
traffic scenarios, as shown in Fig. 3. The top-left
section provides information about the session, model
and lanes. The left-middle part and right-middle part
shows the type and color of the detected lane mark-
ings. The tables on the bottom-left and bottom-right
shows the CAN bus data for the lane marking. The
upper-right table shows the main state data for the
ego-vehicle. The middle part displays image frames
from the front-facing and area-view cameras. The top
part shows the prediction probability distribution for
LLC, LK, RLC maneuver classes in the form of bars,
which are color-coded based on their probability.
In the urban traffic scene depicted in Fig. 3, the
model extracts visual features from the scene to detect
vehicles, the bus and traffic signs, while also reading
the ego-vehicle‘s state values and lane features from
CAN. For the timestep t + T
p
, the model predicts an
LLC with a probability of nearly 90%.. This decision
can be interpreted considering that the ego-vehicle’s
goal is to continue straight, the ego-vehicle is moving
faster than the bus, and that the left lane is free.
5 CONCLUSION
This work introduces WylonSet, a lane change dataset
and proposes a novel multi-modal deep learning ar-
chitecture for analyzing and predicting lane change
maneuvers for the ego-vehicle. The dataset com-
prises front-facing camera and area-view cameras, ve-
hicle state data and lane information, with around
500 lane change maneuvers labeled across diverse ur-
ban scenes. The proposed architecture is based on
CNNs for extracting visual features, GNNs for captur-
ing spatial features from interaction graphs of traffic
scenes, and RNNs for tracking over time these fea-
tures, along with vehicle state values and lane infor-
mation. The ablation study highlights the substantial
impact of the interaction module on the model’s per-
formance, demonstrating improved results even with-
out the visual module. The primary limitation is the
difficulty in directly comparing and assessing the pro-
posed architecture against existing approaches.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
288

ACKNOWLEDGEMENTS
This work is supported by the Federal Ministry for
Digital and Transport (BMDV) of Germany in the
scope of project AORTA (FKZ: 01MM20002).
REFERENCES
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In 2016 IEEE Conference on
Computer Vision and Pattern Recognition, CVPR, Las
Vegas, NV, USA, June 27-30, 2016, pages 3213–3223.
Diehl, F., Brunner, T., Truong-Le, M., and Knoll, A. C.
(2019). Graph neural networks for modelling traffic
participant interaction. In 2019 IEEE Intelligent Ve-
hicles Symposium, IV 2019, Paris, France, June 9-12,
2019, pages 695–701. IEEE.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013). Vi-
sion meets robotics: The KITTI dataset. Intl. Journal
of Robotics Research (IJRR), 32(11):1231–1237.
Huang, X., Cheng, X., Geng, Q., Cao, B., Zhou, D., Wang,
P., Lin, Y., and Yang, R. (2018). The apolloscape
dataset for autonomous driving. In 2018 IEEE Con-
ference on Computer Vision and Pattern Recognition
Workshops, CVPR Workshops, Salt Lake City, USA,
June 18-22, 2018, pages 954–960. IEEE.
Izquierdo, R., Quintanar,
´
A., Lorenzo, J., Daza, I. G., Parra,
I., Llorca, D. F., and Sotelo, M.
´
A. (2021). Vehicle
lane change prediction on highways using efficient en-
vironment representation and deep learning. IEEE Ac-
cess, 9:119454–119465.
Lee, D., Kwon, Y. P., McMains, S., and Hedrick, J. K.
(2017). Convolution neural network-based lane
change intention prediction of surrounding vehicles
for ACC. In 20th IEEE Intl. Conf. on Intelligent Trans-
portation Systems, ITSC 2017, pages 1–6. IEEE.
Li, X., Ying, X., and Chuah, M. C. (2019). GRIP: graph-
based interaction-aware trajectory prediction. In 2019
IEEE Intelligent Transportation Systems Conference,
ITSC 2019, Auckland, New Zealand, October 27-30,
2019, pages 3960–3966. IEEE.
Liang, M., Yang, B., Hu, R., Chen, Y., Liao, R., Feng, S.,
and Urtasun, R. (2020). Learning lane graph represen-
tations for motion forecasting. In ECCV 2020 - 16th
European Conference, Glasgow, UK, August 23-28,
2020, Proceedings, Part II, volume 12347 of Lecture
Notes in Computer Science, pages 541–556. Springer.
Lin, T., Maire, M., Belongie, S., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Dollar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Pan, J., Sun, H., Xu, K., Jiang, Y., Xiao, X., Hu, J., and
Miao, J. (2020). Lane-attention: Predicting vehicles’
moving trajectories by learning their attention over
lanes. In IEEE/RSJ Intl. Conf. on Intelligent Robots
and Systems, IROS 2020, Las Vegas, NV, USA, Oct.
24, 2020 - Jan. 24, 2021, pages 7949–7956. IEEE.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., K
¨
opf, A., Yang, E. Z.,
DeVito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Advances in Neural Information
Processing Systems 32: Annual Conf. on Neural In-
formation Processing Systems 2019, NeurIPS 2019,
Vancouver, BC, Canada, pages 8024–8035.
Rama, P. and Bajc¸inca, N. (2022). NIAR: interaction-aware
maneuver prediction using graph neural networks and
recurrent neural networks for autonomous driving. In
Sixth IEEE Intl. Conf. on Robotic Computing, IRC
2022, Italy, Dec. 5-7, 2022, pages 368–375. IEEE.
Rama, P. and Bajc¸inca, N. (2023). MALE-A: stimuli and
cause prediction for maneuver planning via graph neu-
ral networks in autonomous driving. In 2023 IEEE
26th International Conference on Intelligent Trans-
portation Systems, ITSC 2023, Bilbao, Spain, Septem-
ber 24-28, 2023, pages 3545–3550. IEEE.
Ramanishka, V., Chen, Y., Misu, T., and Saenko, K. (2018).
Toward driving scene understanding: A dataset for
learning driver behavior and causal reasoning. In 2018
IEEE Conference on Computer Vision and Pattern
Recognition, CVPR, Salt Lake City, USA, June 18-22,
2018, pages 7699–7707. IEEE Computer Society.
Wang, C., Bochkovskiy, A., and Liao, H. M. (2022).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. In IEEE/CVF
Conf. on Computer Vision and Pattern Recognition,
CVPR 2023, pages 7464–7475. IEEE.
Wang, M., Yu, L., Zheng, D., Gan, Q., Gai, Y., Ye, Z., Li,
M., Zhou, J., Huang, Q., Ma, C., Huang, Z., Guo, Q.,
Zhang, H., Lin, H., Zhao, J., Li, J., Smola, A. J., and
Zhang, Z. (2019). Deep graph library: Towards ef-
ficient and scalable deep learning on graphs. CoRR,
abs/1909.01315.
Wang, Z., Chen, J., and Chen, H. (2021). EGAT: edge-
featured graph attention network. In Artificial Neu-
ral Networks and Machine Learning - ICANN 2021 -
30th Intl. Conf. on Artificial Neural Networks, 2021,
volume 12891, pages 253–264. Springer.
Wei, Z., Wang, C., Hao, P., and Barth, M. J. (2019).
Vision-based lane-changing behavior detection using
deep residual neural network. In 2019 IEEE Intelli-
gent Transportation Systems Conference, ITSC 2019,
pages 3108–3113. IEEE.
Xue, J., Fang, J., Li, T., Zhang, B., Zhang, P., Ye, Z., and
Dou, J. (2019). BLVD: building A large-scale 5d se-
mantics benchmark for autonomous driving. In Intl.
Conf. on Robotics and Automation, ICRA, Montreal,
QC, Canada, May 20-24, 2019, pages 6685–6691.
Yu, F., Xian, W., Chen, Y., Liu, F., Liao, M., Madhavan,
V., and Darrell, T. (2018). BDD100K: A diverse driv-
ing video database with scalable annotation tooling.
CoRR, abs/1805.04687.
Multi-Modal Deep Learning Architecture Based on Edge-Featured Graph Attention Network for Lane Change Prediction
289
