
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal
Vibration Sewage Treatment Plant Data
Simeon Krastev
1
, Aukkawut Ammartayakun
1
, Kewal Jayshankar Mishra
1
, Harika Koduri
1
,
Eric Schuman
1
, Drew Morris
1
, Yuan Feng
1
, Sai Supreeth Reddy Bandi
1
, Chun-Kit Ngan
1
,
Andrew Yeung
2
, Jason Li
2
, Nigel Ko
2
, Fatemeh Emdad
1
, Elke Rundensteiner
1
, Heiton M. H. Ho
3
,
T. K. Wong
3
and Jolly P. C. Chan
3
1
Data Science Program, Worcester Polytechnic Institute, 100 Institute Rd., Worcester, MA, U.S.A.
2
XTRA Sensing Limited, Wan Chai, Hong Kong Island, Hong Kong SAR
3
Drainage Services Department, The Government of the Hong Kong Special Administrative Region, Wanchai,
Hong Kong Island, Hong Kong SAR
{sdkrastev, aammartayakun, kmishra1, hkoduri, demorris, erschuman, yfeng8, sbandi, cngan, femdad, rundenst}@wpi.edu,
Keywords:
Predictive Maintenance, Anomaly Detection, Signal Averaging, Data Fusion, Multimodal Feature Extraction,
Autoencoder, Transformer Model, Sewage Treatment Plants.
Abstract:
In this paper, we propose a hybrid anomaly detection pipeline, META, which integrates Multimodal-feature
Extraction (ME) and a Transformer-based Autoencoder (TA) for predictive maintenance of sewage treatment
plants. META uses a three-step approach: First, it employs a signal averaging method to remove noise and
improve the quality of signals related to pump health. Second, it extracts key signal properties from three
vibration directions (Axial, Radial X, Radial Y), fuses them, and performs dimensionality reduction to create
a refined PCA feature set. Third, a Transformer-based Autoencoder (TA) learns pump behavior from the PCA
features to detect anomalies with high precision. We validate META with an experimental case study at the
Stonecutters Island Sewage Treatment Works in Hong Kong, showing it outperforms state-of-the-art methods
in metrics like MCC and F1-score. Lastly, we develop a web-based Sewage Pump Monitoring System hosting
the META pipeline with an interactive interface for future use.
1 INTRODUCTION
A sewage treatment plant (STP) is a critical infras-
tructure designed to process wastewater from residen-
tial, commercial, and industrial sources. Its objective
is to remove contaminants, ensuring the treated water
is safe and suitable for reuse before releasing it back
to the environment. This process is essential for pro-
tecting public health and preserving the natural envi-
ronment by adhering to water quality standards.
STPs support a sustainable environment and pos-
itively impact human life in several ways. For exam-
ple, advanced sewage treatment, such as Singapore’s
NEWater program, significantly reduces the risk of
waterborne diseases (Lee and Tan, 2016). By convert-
ing treated wastewater into ultra-clean, high-quality
water, Singapore meets up to 40% of its water de-
mand with NEWater, demonstrating a commitment to
public health and environmental sustainability. The
Groundwater Replenishment System (GWRS) in Or-
ange County, California, demonstrates the poten-
tial of STPs in supporting sustainable agriculture
and conserving freshwater resources (Ormerod and
Silvia, 2017). By purifying treated wastewater to
potable standards, GWRS provides a reliable water
supply, reducing dependence on imported water. In
Namibia, Windhoek Goreangab Operating Company
(WINGOC) provides treated wastewater which is ex-
tensively used for agricultural irrigation (Lahnsteiner
and Lempert, 2007). This approach not only con-
serves freshwater resources but also supports sustain-
able agriculture by providing a reliable water source
for irrigation.
The Stonecutters Island Sewage Treatment Works
(SCISTW) is one of the most efficient chemical treat-
ment plants in the world, removing 70% of the or-
ganic pollutants in terms of biochemical oxygen de-
mand; 80% of the suspended solids; and 50% of
sewage pathogens in terms of Escherichia coli (E.
Krastev, S., Ammartayakun, A., Mishra, K., Koduri, H., Schuman, E., Morris, D., Feng, Y., Bandi, S., Ngan, C., Yeung, A., Li, J., Ko, N., Emdad, F., Rundensteiner, E., Ho, H., Wong, T. and
Chan, J.
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal Vibration Sewage Treatment Plant Data.
DOI: 10.5220/0013031600003837
In Proceedings of the 16th International Joint Conference on Computational Intelligence (IJCCI 2024), pages 461-474
ISBN: 978-989-758-721-4; ISSN: 2184-3236
Copyright © 2024 by Paper published under CC license (CC BY-NC-ND 4.0)
461
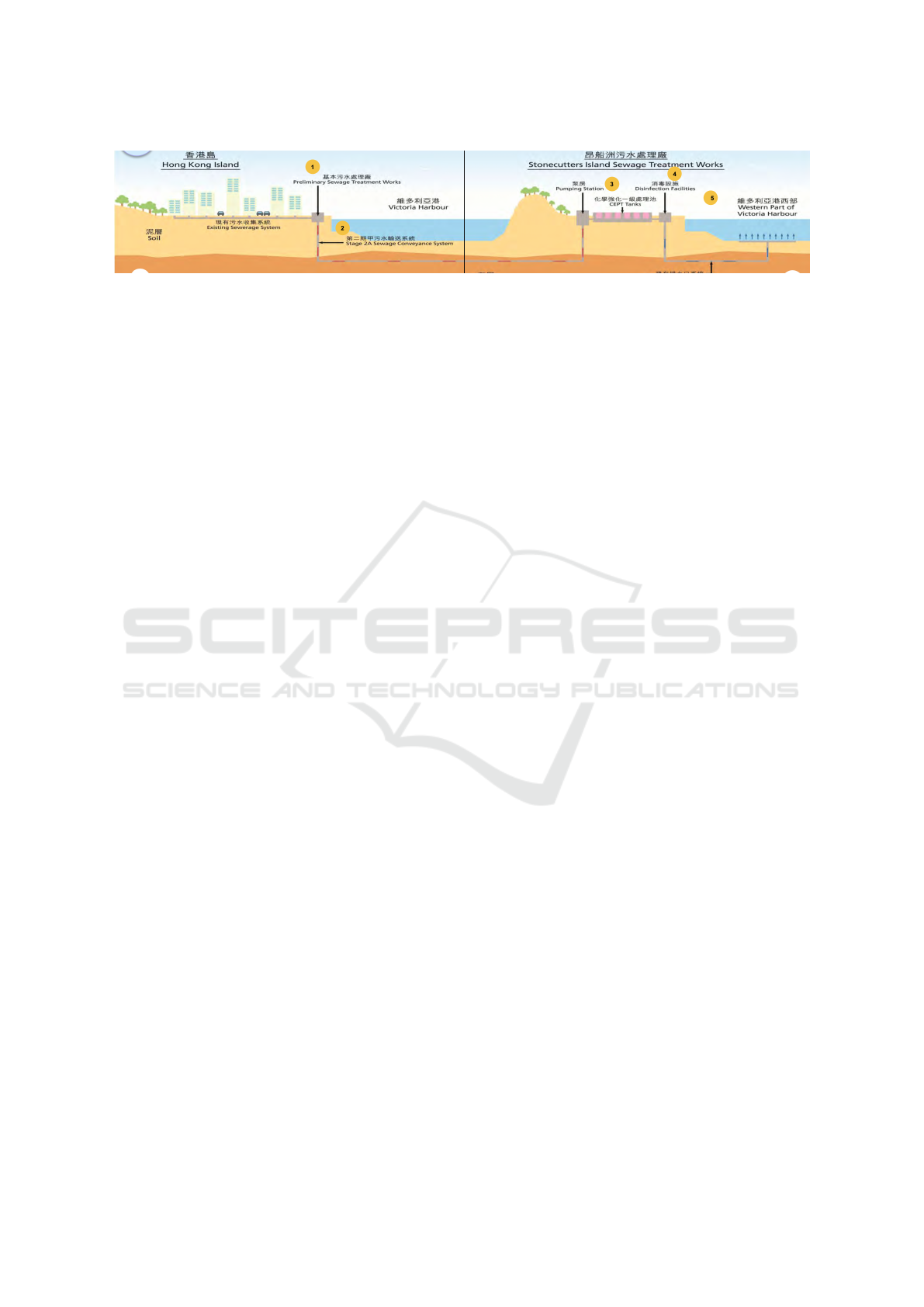
Figure 1: Stonecutters Island Sewage Treatment Works is located in Victoria Harbour and collects sewage from the Hong
Kong region for processing. The project is focused on the main pumping stations (3) that pump the filtered sewage up to the
chemical processing tanks (Drainage Services Department, 2009b).
coli) level, which is an indicator of disease causing
microorganisms. In addition, the levels of key pol-
lutants in the harbour-area waters have generally de-
creased. Ammonia, which is toxic to marine life, de-
clined by 25%; nutrients, in terms of total inorganic
nitrogen and phosphorus, have reduced by 16% and
36%, respectively; and the overall E. coli level has
reduced by around 50% (Drainage Services Depart-
ment, 2009a).
The current strategy to prevent failures in large-
scale industrial pumps like those found in STPs is
to follow a routine maintenance schedule. This ap-
proach involves servicing the pumps at regular inter-
vals and replacing parts that cannot be repaired over
the life of the pump. For example, the bearings may
be repacked with grease annually until they reach
their rated life, at which point the entire bearing as-
sembly must be replaced. This approach is relatively
simple to implement and does prevent failures due to
wear and age, but it is not able to capture failures due
to incorrect installation or operation. Another issue
with this approach is that parts may be prematurely
replaced, which increases part cost and may unneces-
sarily bring about machine downtime (Carson, 2011).
Predictive maintenance, also referred to as
condition-based maintenance, enhances routine main-
tenance by continuously monitoring the condition of
system components, replacing those that exhibit signs
of impending failure. A primary benefit of such an ap-
proach is that a broader range of causes of failure can
be prevented. For example, an incorrectly installed
component would start to show signs of wear that the
predictive model could detect and signal a need for re-
placement despite the service life not being reached.
However, this approach requires a more complex
system to predict and identify potential failures before
they occur. A traditional approach for doing this usu-
ally requires the development of hard-coded rules and
algorithms to define and then detect abnormal opera-
tion. This can easily grow exponentially in cost and
complexity to implement (Newton, 2021); addition-
ally, it requires prior knowledge and definition of all
possible anomalies. An alternative approach, which
this paper proposes, is to instead leverage state-of-
the-art deep learning techniques and neural networks
to automatically learn data-driven strategies that char-
acterize abnormal operation (Faisal et al., 2023).
Such a technique requires the fusion of multiple
sources of pump vibration data (Diez-Olivan et al.,
2019). If intelligently fused, the anomaly detection
model can then learn from a much broader space in-
stead of just learning one source of vibration data.
For example, fusing three directions of pump vibra-
tion data together may pick up anomalous behavior
that does not arise in just one direction. In addition,
the data dimensions can be reduced through model-
ing techniques such as Autoencoders and Principal
Component Analysis (PCA). These techniques can re-
move noise and redundant information from the data
streams, resulting in a cleaner signal for the anomaly
detection models to work on.
Thereafter, the multi-modal preprocessed data can
be used as the input to modern deep learning meth-
ods such as transformer models. Transformers learn
complex possibly non-linear relationships in data
through a deep neural network architecture and atten-
tion mechanisms (Vaswani et al., 2017), which focus
on different aspects of the data to understand normal
pump behavior. Combining this feature with an abil-
ity to track changes over time, the models can tell
when the pump is deviating from normal activity.
In the literature, hybrid machine learning (ML)
models and neural networks have been used to diag-
nose power transformers using acoustic signals (Yu
et al., 2023), while transformer models have been uti-
lized for fault detection and classification in manu-
facturing (Wu et al., 2023). However, research on the
applications of these models remains limited. In ad-
dition, a few studies (Diez-Olivan et al., 2019) have
explored leveraging multiple input data formats and
combining data from various sources to enhance de-
tection performance.
To leverage the strengths of these methodologies
for predictive maintenance of STPs, we propose a in-
novative anomaly detection platform, called META,
which integrates Multimodal-feature Extraction (ME)
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
462

and a Transformer-based Autoencoder (TA) solution.
Our contributions to this work are five-fold:
1. We develop a signal averaging method to remove
unrelated noise from the raw sensor data and im-
prove the quality of signals related to the pump
health and operations.
2. We extract the meaningful signal properties from
three vibration signal directions (i.e., Axial, Ra-
dial X, and Radial Y) using multimodal-feature
extraction methods. We then fuse these proper-
ties together and reduce data dimensionality using
PCA to generate a refined PCA feature set.
3. We apply a Transformer-based Autoencoder (TA)
model to learn pump behavior from the extracted
PCA feature set to detect anomalous behavior.
4. We conduct an extensive experimental case study
on the SCISTW, located in Hong Kong, in which
we reconstruct the vibration signals of the pumps
and set a threshold to detect anomalies based
on reconstruction error. Having labeled data
on the dates in which the pumps were oper-
ating abnormally, we are able to obtain accu-
racy metrics on the performance of the META
pipeline. META achieves MCC/F1 scores of
0.966/0.995 in anomaly detection, a percent-
age increase of 4.89%/2.47% compared to the
state-of-the-art anomaly detection performance
by (Yu et al., 2023), and a percentage increase of
2.77%/3.977% compared to (Wu et al., 2023).
5. We create a web prototype for a Sewage Pump
Monitoring System hosting the META pipeline,
providing an interactive interface for future use.
The rest of the paper is organized as follows. In
Section 2, we review the previous work and litera-
ture on anomaly detection methods and explore the
existing data fusion techniques and transformer-based
models in predictive maintenance. In Section 3, we
provide an overview of the SCISTW. In Section 4,
we introduce our META framework, broadly describ-
ing its core components. Starting in Section 4.1, we
examine each of its components, beginning with the
Signal Averaging method. In Section 4.2, we explain
our ME approach. In Section 4.3, we present our
TA Model, explaining its architecture and the mech-
anism that it uses to detect anomalies. In Section 5,
we conduct an extensive experimental study and an-
alyze the performance of the META platform in de-
tecting anomalies at the SCISTW. In Section 6, we
describe the development of our GUI-based applica-
tion for monitoring sewage pumps and visualizing the
analysis results. Finally, in Section 7, we conclude the
paper and outline the potential future work to enhance
our META framework’s performance and explore its
application in other types of industrial machinery.
2 RELATED WORK
The development of anomaly detection methods for
rotating machinery is an active area. Three data fu-
sion techniques are reviewed and explored for rotat-
ing machinery. In Yuan et al.’s work, a flexible frame-
work is proposed to fuse multiple sources together
to detect abnormal operation. Multiple 1-d and 2-d
signals are first individually passed through convolu-
tional neural networks and subsequently joined using
t-distributed Stochastic Neighbor Embedding (tSNE)
(Yuan et al., 2018). The benefit of this approach is
the flexibility in its application which would allow it
to be adapted to other domains. Pang et al.’s work
proposes a model that applies Stacked Denoising Au-
toEncoders (SDAEs) to the individual data sources
and fuses these sources together via Local and Global
Principal Components Analysis (LGPCA) with the
aim of improving the representation of the signal.
The SDAEs remove the uncorrelated noise from the
source signal and the LGPCA combines the signals
together across different scales to ensure that the tem-
poral relationships are preserved (Pang et al., 2020).
Finally, in Wang et al.’s work, the authors propose
a method of incorporating feature selection into the
model training processing by computing the Mean
Impact Value (MIV) and Within-class and Between-
class Discriminant Analysis (WBDA) to dynamically
select features. The approach uses traditional mea-
sures to assess the health of rotating machinery and
aims to combine these features so that a greater repre-
sentation and context is achieved while reducing data
redundancy and noise (Wang et al., 2021).
Two transformer models are reviewed and ex-
plored in predictive maintenance of rotating machin-
ery. In Yu et al.’s work, the authors propose a hybrid
anomaly detection model that combines a convolu-
tional neural network and a recurrent neural network
with the attention mechanism found in a transformer.
This approach uses the CNN to extract relevant pat-
terns from the input signals and the recurrent layer to
capture the long-running state of the system and feeds
this information into the attention mechanism to de-
tect anomalous operation (Yu et al., 2023). In Wu et
al.’s work, the authors adapt a traditional transformer
to work in the classification setting for the purpose of
detecting abnormal operation of the pump. The trans-
former is used as an encoder to embed the input data
and generate a classification by passing the embed-
ding to a fully connected network (Wu et al., 2023).
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal Vibration Sewage Treatment Plant Data
463

Figure 2: The motor that drives one of the pumps in main
pumping station 2.
3 BACKGROUND:
STONECUTTERS ISLAND
SEWAGE TREATMENT
The SCISTW in Hong Kong is a core infrastructure
that makes every effort to minimize unplanned inter-
ruptions in service. It is one of the largest and the
most compact sewage treatment works of its type in
the world, occupying 10 hectares of reclaimed land,
and is designed to provide Chemically Enhanced Pri-
mary Treatment for an average flow of 1.7 million cu-
bic meters per day (Drainage Services Department,
2009a). The overall process of treating sewage is
shown in Figure 1. In order to pump 1.7 million cubic
meters of sewage per day, the SCISTW has two main
pumping facilities that run continuously. Both pump-
ing stations are comprised of eight sewage pumps that
are able to be independently driven at a range of fre-
quencies or completely shutdown in order to maintain
a target flow rate into the treatment pools. Direct-
drive pumps pump sewage approximately 40 meters
up from the collection tunnels to the treatment pools.
The AC induction motor used to drive the pump is
shown in Figure 2; the main pump body is shown
in Figure 3. The sewage pumps that move the raw
Figure 3: Main pump body that transfers sewage from the
collection tunnels to the treatment pools 40 meters above.
sewage from the collection tunnels up to the treat-
ment tanks are critical to the operation of the treat-
ment plant. The current regime for failure preven-
tion at the SCISTW is largely based on preventative
maintenance, relying on the excess pumping capac-
ity available in the plant by using working pumps
to handle the load when pumps fail. Shifting to a
condition-based maintenance approach would allow
the SCISTW to prevent pumps from failing unexpect-
edly and enable the plant to treat a greater load of
sewage as a result.
The primary hurdle to the SCISTW adopting a
condition-based maintenance approach is the cost and
complexity of implementing a hard-coded approach
to the pumps. While the design of those pumps is rel-
atively simple, the number of failure modes is high,
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
464
and the interaction between failure modes increases
the complexity of creating logic that may not accu-
rately detect when a pump is about to fail. Fur-
thermore, the pumps are controlled and monitored
through several disparate systems, making it diffi-
cult to create a holistic anomaly detection system that
can integrate all the data coming from the different
sources. As a solution, the SCISTW is looking to-
wards implementing an independent monitoring sys-
tem capable of detecting abnormalities autonomously,
without the need to tap into each system individually.
4 META OVERVIEW: ANOMALY
DETECTION PLATFORM
Our pipeline for anomaly detection incorporates a
method of fusing multi-directional raw acceleration
time waveform data (Axial, Radial X, and Radial Y)
and using the resultant product as an input for a trans-
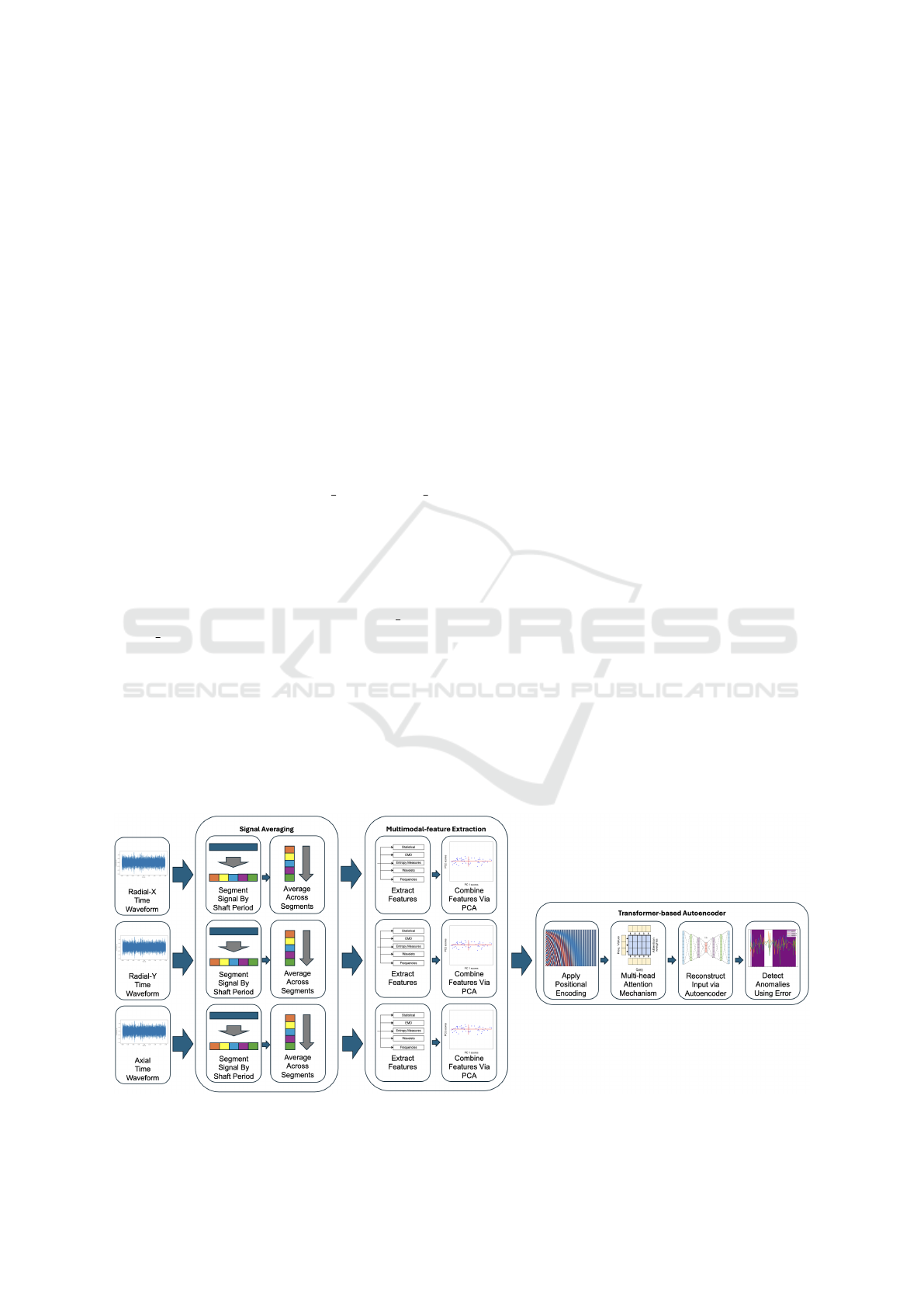
former model architecture. This pipeline, shown in
Figure 4, consists of three core components, including
Signal Averaging (SA), Multimodal-feature Extrac-
tion, and a Transformer-based Autoencoder Model.
The purpose of the SA module is to process the
three time waveform signals (Axial, Radial X, and
Radial Y) collected from the accelerometer. These
signals are first split into time segments based on
the shaft periods and then averaged to preserve the
segment signals specific to each individual pump,
effectively removing unrelated noise. After that,
the cleaned signals are sent to the ME module that
summarizes the specific aspects of the data by us-
ing statistical measures, empirical mode decomposi-
tion (EMD), entropy measures, wavelet packet de-
composition (WPD), and frequency domain analysis
(FDA), respectively. The summarized data of each
time waveform signal are then further processed us-
ing Mean Impact Value (MIV) and Within-class and
Between-class Discriminant Analysis (WBDA) for
feature selection. The final selected feature set is then
fused by PCA. Those PC features are combined for
each time waveform signal and then further concate-
nated from all these three directions to form the fi-
nal feature set that is then sent to the TA model for
the anomaly detection. This model processes the final
feature set through flattening, patching, and positional
encoding layers, before going through a multi-head
attention encoder. The output is then sent through
several dense layers to reconstruct the signal. Once
trained, this model architecture is used to classify
pump behavior as normal or anomalous based on re-
construction error. Once the error threshold is deter-
mined, any major deviation from the reconstruction
error of a model trained on normal data, i.e., above
the error threshold, could be a potential anomaly.
4.1 META Signal Averaging Strategy
The data that is analyzed by the META framework
to detect abnormal pump operations is collected from
various locations on the pumps using a three-axis ac-
celerometer. The data is collected in two seconds ev-
ery four hours in all three directions, yielding 25,600
data points per two-second recording. The accelerom-
eter is able to record all frequencies between 0.5 and
5,000 Hz. A two-second recording is long enough to
record several full rotations of the pump so that pump
health can be determined.
While the ability to record such a large range of
signals has the benefit of being able to detect multi-
ple types of failures like shaft imbalances at the low
Figure 4: META Framework.
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal Vibration Sewage Treatment Plant Data
465
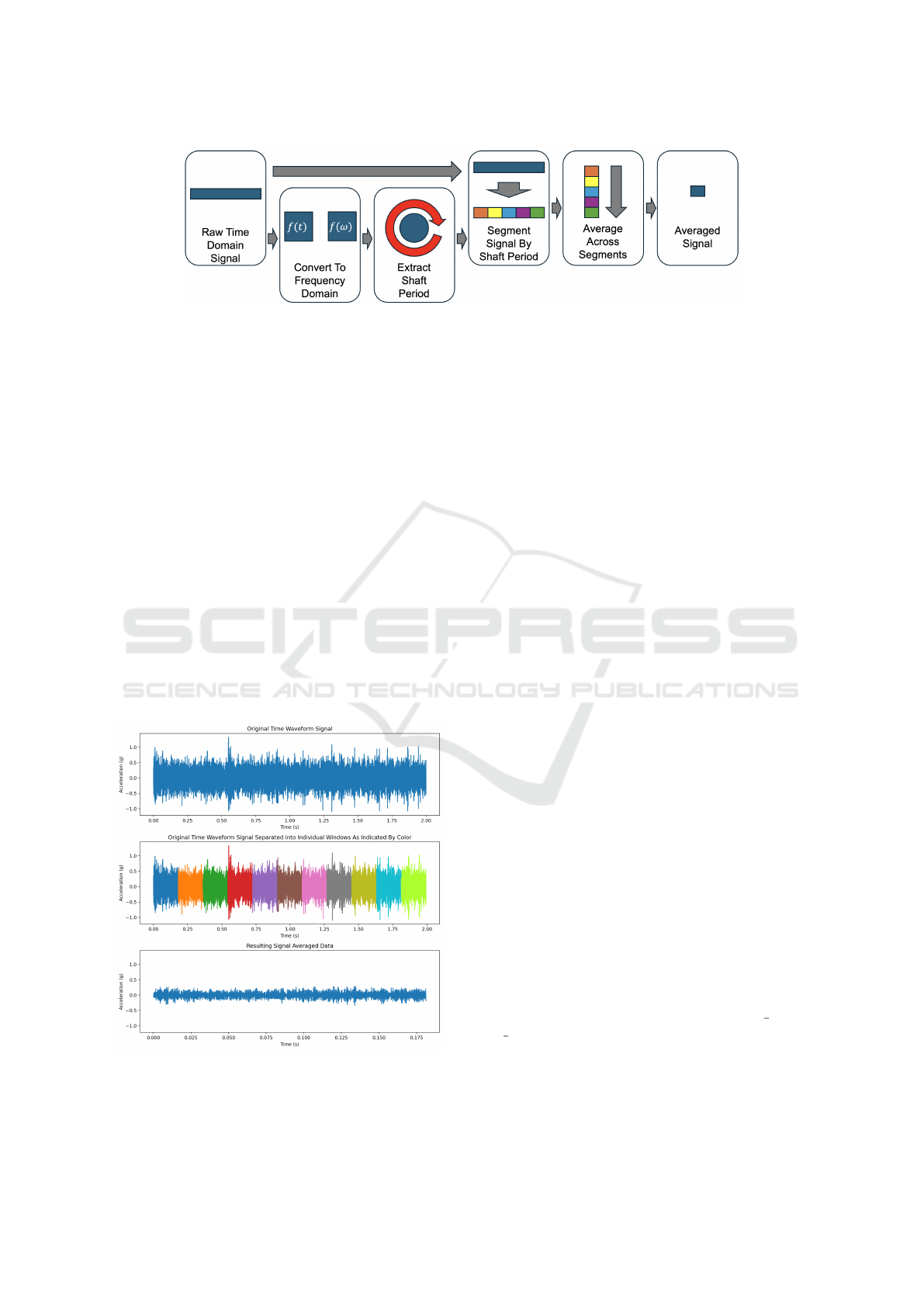
Figure 5: 1) The raw time-based signal is first used to determine the rotation period of the pump. 2) The extracted period is
then used to segment the raw time-based signal into windows equal to the rotation period. This aligns the angle of rotation
for elements across windows. 3) The segmented windows are then averaged across the segments to generate a new segment
which should reduce the uncorrelated noise while preserving the relevant signals.
end and seized bearings at the high end, it also has the
drawback of capturing a lot of information in the pro-
cess. In fact, the system’s broadband noise is so sig-
nificant that it poses substantial challenges for many
anomaly detection algorithms, making it difficult to
distinguish between signals from a healthy pump and
an unhealthy one. Our META framework can address
this issue by incorporating signal averaging as a pre-
processing step to improve the signal-to-noise ratio.
Signal averaging is applied to the raw time wave-
form signal in an attempt to improve the signal-to-
noise ratio of the captured signal. At its core, the
pumps are rotating machinery, and that means the ma-
jority of vibration signals relevant to the operation
of the pump is periodic in nature. Furthermore, the
short duration of the recording means the speed of the
pumps can be assumed to be steady-state. Exploiting
this fact allows the original time waveform signal to
Figure 6: Top) The original time waveform data. Middle)
The original time waveform data segmented into windows
of time that match the period of rotation. Bottom) Resulting
signal averaged data.
be split into time segments equal to the rotation pe-
riod of the pump and then averaged together. Aver-
aging these segments together is expected to preserve
the signals specific to the pump because they ”con-
structively” overlap. However, the random noise not
related to the operation of the pump is expected to
”destructively” overlap, as it is assumed that the noise
has a mean of 0. By averaging multiple segments to-
gether, the signals related to the pump are elevated
above the noise providing a cleaner signal to the work
downstream. Signal averaging is implemented in our
META framework shown in Figure 5.
Applying signal averaging as a preprocessing step
makes the assumption that the noise that is uncorre-
lated to the rotation is of less importance than the sig-
nals and the noise that is correlated to the rotation.
The rotation of the shaft is the sole energizing com-
ponent of the system, making this a safe assumption.
Furthermore, while signal averaging reduces the noise
floor of the resulting signal, it does not remove the
noise from the signal altogether. This provides some
protection against the assumption proving to be false.
One notable issue with applying signal averaging to
the data is that it may greatly diminish transient sig-
nals that do not repeatedly appear across multiple ro-
tations of the pump. An example of passing the data
through signal averaging is shown in Figure 6.
4.2 META Multimodal Feature
Extraction
In the context of enhancing anomaly detection mecha-
nisms for pump systems, the presented method adopts
a multimodal feature extraction approach, leveraging
the tri-axial nature of pump operation—Radial X, Ra-
dial Y, and Axial. This approach facilitates a com-
prehensive analysis by considering the acceleration
data across each dimension, enabling the capture of a
full spectrum of potential anomalies. The engineering
process produces an initial robust set of features in-
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
466
corporating time-domain statistics, frequency-domain
characteristics, and time-frequency domain features.
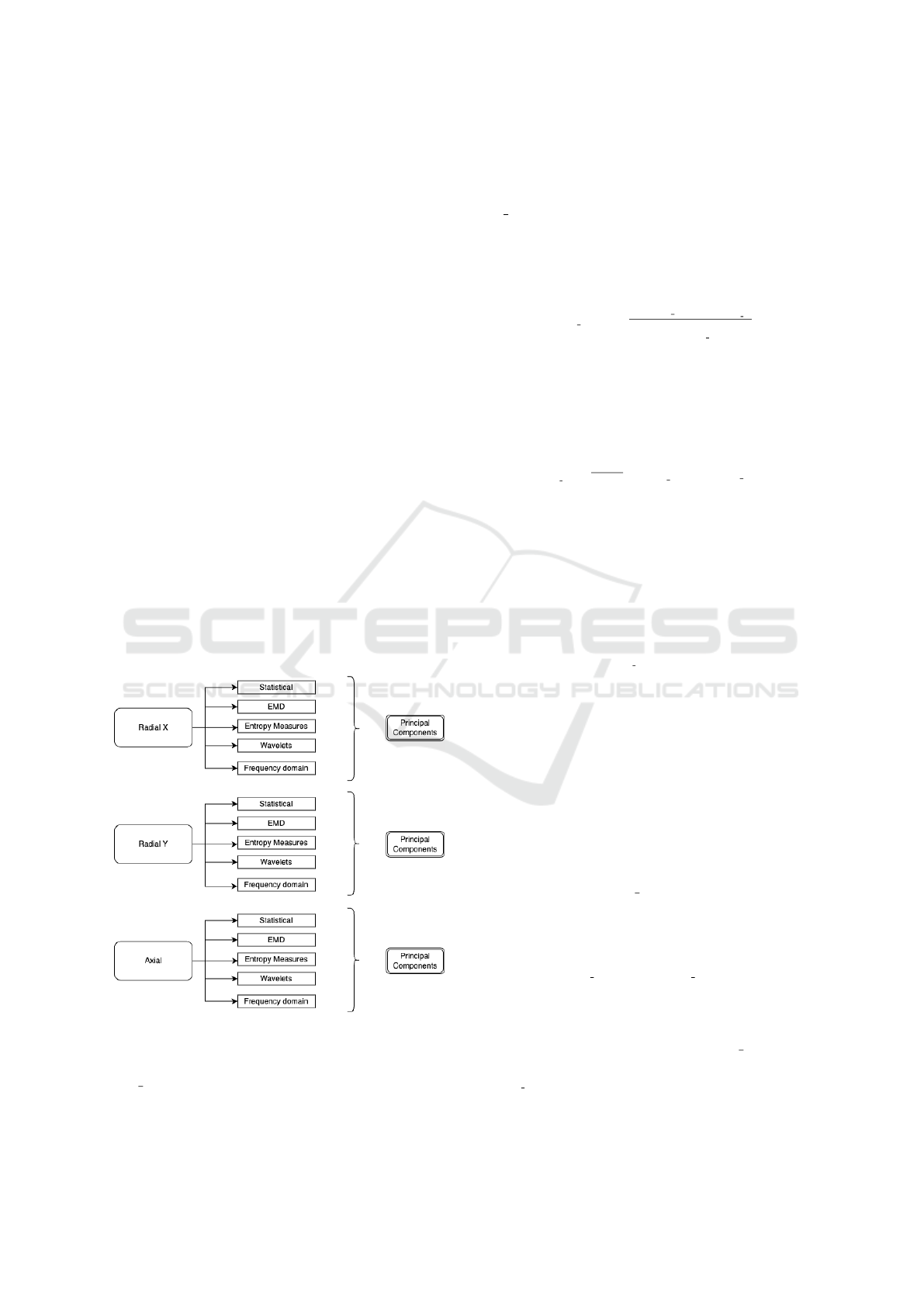
These features, which are meticulously named to re-
flect their source and extraction method, shown in
Figure 7, range from basic statistical measures, such
as mean, standard deviation, skewness, and kurtosis,
to more complex analyses including empirical mode
decomposition (EMD) (i.e., energy and entropy), en-
tropy measures (i.e., permutation and dispersion),
wavelet packet decomposition, and frequency mea-
sures (i.e., sum amplitude, average spectrum, standard
deviation spectrum, and integral spectrum).
The ME approach therefore offers a comprehen-
sive analysis of the pump system’s operational data.
The concatenation of these features enables a robust
anomaly detection system that can accurately detect
and characterize a wide range of anomalous behav-
iors unique to each axis of operation, thereby enabling
more reliable predictive maintenance. Additionally, it
caters to the detection of complex, non-linear interac-
tions within pump mechanics, thereby broadening the
scope of detectable anomalies.
Following the feature selection process by MIV
and WBDA, PCA is applied to each directional fea-
ture set independently. PCA, as a dimensionality
reduction technique, identifies the principal compo-
nents that encapsulate the maximum variance within
the data, thus preserving essential information while
reducing the data’s complexity.
Figure 7: Multimodal-Feature Extraction.
For the PCA method explanation, we use Ra-
dial X as an example. When PCA is applied to this
signal, the process involves the following steps:
Standardization
The features extracted by each method from the Ra-
dial X, shown in Figure 7, are standardized. This in-
volves subtracting the mean of each feature and then
dividing by the standard deviation. Standardization
ensures that each feature contributes equally to the
analysis.
X
Radial X, std
=
X
Radial X
−µ
X
Radial X
σ
X
Radial X
(1)
Covariance Matrix Calculation
The covariance matrix of the standardized features is
computed. The covariance matrix provides a measure
of how much the features vary together.
Σ
X
Radial X
=
1
n −1
X
⊤
Radial X, std
X
Radial X, std
(2)
Eigenvalue and Eigenvector Computation
The eigenvalue equation is solved to obtain the eigen-
values and eigenvectors of the covariance matrix.
The eigenvalues represent the amount of variance ex-
plained by each principal component, and the eigen-
vectors represent the direction of the principal com-
ponents.
Σ
X
Radial X
v
i
= λ
i
v
i
(3)
Principal Component Selection
The top k principal components are selected by the
eigenvectors corresponding to the largest eigenvalues.
This step reduces the dimensionality of the data while
retaining the most important information.
V
k
= [v
1
, v
2
, . . . , v
k
] (4)
Data Transformation
The standardized Radial X data is transformed into
the principal component space. This transformation
projects the original data onto the new basis formed
by the selected principal components.
X
Radial X, PCA
= X
Radial X, std
V
k
(5)
Principal Components Concatenation
The same process is applied to the Radial Y and Ax-
ial signals, resulting in the transformed data matrices
X
Radial Y, PCA
and X
Axial, PCA
. The principal compo-
nents from all three directions are then concatenated
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal Vibration Sewage Treatment Plant Data
467

to form the final feature set, ensuring that the multi-
directional information is integrated into a compre-
hensive analysis.
[X
Radial X, PCA
, X
Radial Y, PCA
, X
Axial, PCA
]
PCA Example
Let’s assume that we have the following data for Ra-
dial
X, Radial Y, and Axial signals:
X
Radial X
=
1 2 3
4 5 6
7 8 9
,
X
Radial Y
=
2 3 4
5 6 7
8 9 10
,
X
Axial
=
3 4 5
6 7 8
9 10 11
Standardization
We standardize the features by subtracting the mean
and dividing by the standard deviation using Equation
(1). This step ensures that the data has zero mean and
unit variance, which is necessary for PCA. The mean
and standard deviation for X
Radial X
are:
µ
X
Radial
X
=
4 5 6
,
σ
X
Radial X
=
2.449 2.449 2.449
Standardized X
Radial X, std
:
X
Radial X, std
=
X
Radial X
−µ
X
Radial X
σ
X
Radial X
=
−1.224 −1.224 −1.224
0 0 0
1.224 1.224 1.224
Covariance Matrix Calculation
We then compute the covariance matrix of the stan-
dardized features by using Equation (2). The covari-
ance matrix helps in understanding the relationships
between different features.
Σ
X
Radial X
=
1
n −1
X
⊤
Radial X, std
X
Radial X, std
=
1.5 1.5 1.5
1.5 1.5 1.5
1.5 1.5 1.5
Eigenvalue and Eigenvector Computation
After that, we solve the eigenvalue equation to obtain
eigenvalues and eigenvectors by using Equation (3).
The eigenvalues indicate the variance explained by
each principal component, and the eigenvectors pro-
vide the directions of these components. Assume that
the eigenvalues are λ
1
= 4.5 and λ
2
= λ
3
= 0, with
corresponding eigenvectors:
v
1
=
1
√
3
1
1
1
with v
2
, v
3
as any orthogonal vectors in the null space
Principal Component Selection
We then select the top k principal components in
Equation 4 (let’s choose k = 1). This step simplifies
the data by reducing its dimensions while retaining
the most significant variance.
V
1
=
1
√
3
1
√
3
1
√
3
Data Transformation
Finally, we transform the standardized Radial X data
into the principal component space using Equation
(5). This transformation projects the data onto the se-
lected principal components, resulting in a new repre-
sentation of the data.
X
Radial X, PCA
= X
Radial X, std
V
k
=
−1.224 −1.224 −1.224
0 0 0
1.224 1.224 1.224
1
√
3
1
√
3
1
√
3
=
−2.121
0
2.121
The resulting X
Radial X, PCA
matrix represents the
data projected onto the principal component, captur-
ing the most significant variance in the data.
The cluster heatmap in Figure 8 derived from the
Radial X direction employs hierarchical clustering to
group features with respect to the principal compo-
nents, with the color-coding representing the degree
of correlation. It corroborates the PCA’s ability to
concentrate variance and provides a visual interpre-
tation tool to assess how different features inform the
principal components. That results in showing that
the multimodal feature extraction and the PCA di-
mension reduction offer a data-efficient, informative
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
468
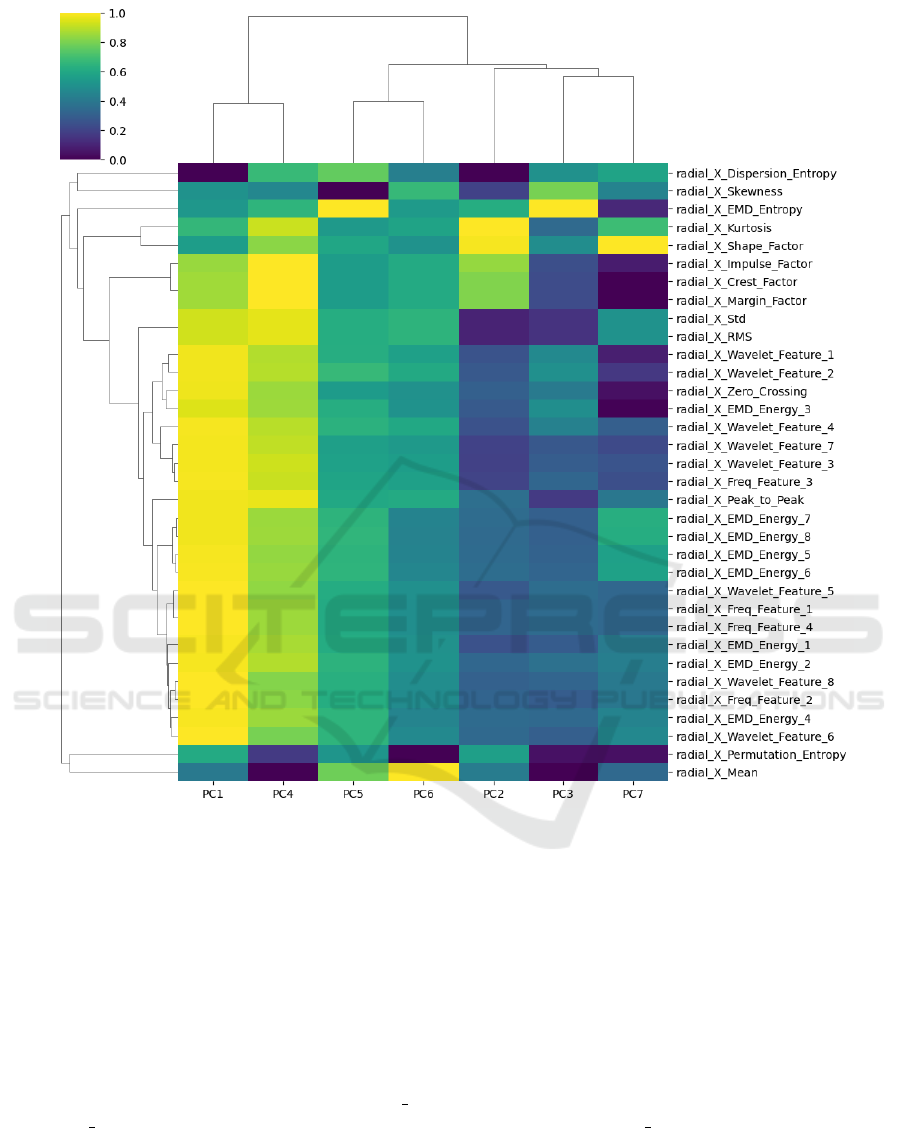
Figure 8: PCA Cluster Map.
foundation for transformer-based algorithms to detect
and predict anomalies in pump systems. The visual
representation through the cluster map further assists
in interpreting the data, ensuring that the most signif-
icant features for anomaly detection are highlighted
and utilized in predictive maintenance models.
When concatenating PCA features, we make the
distinction between PCA Directions and PCA groups.
The Directions approach involves applying PCA sep-
arately to features extracted from different measure-
ment directions of vibration signals (Axial, Radial X,
and Radial Y). Each direction’s features result in dis-
tinct sets of principal components for each direction.
This approach allows for a detailed examination of
how different directions contribute to the overall con-
dition or behavior being studied. On the other hand,
the Feature Groups approach groups features based
on their calculation methods or characteristics and
then applies PCA to each group separately. The fea-
ture groups considered are statistical, EMD-Based,
entropy measures, wavelet packet features, and fre-
quency domain features. Each group’s features are
scaled and PCA is applied independently, resulting in
distinct sets of principal components for each group.
This method allows for a more nuanced understand-
ing of the variability within each feature group and
can highlight important patterns within those groups.
In both cases, the resulting datasets include meta-
data columns (Sensor ID, Datetime, label) along with
the PCA components for each group/direction.
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal Vibration Sewage Treatment Plant Data
469

4.3 Meta Transformer-Based
Autoencoder
4.3.1 Transformer-AutoEncoder Anomaly
Detection (TrAEAD)
In this model, shown in Figure 9, the input data in the
form of a sequence of the PC vectors is used. The
preprocessing and positional encoding are used to in-
corporate the positional relationship into the model
and make the data in a format that is suitable for the
model. This model aims to learn and enhance the dis-
crimination of the representation of the data if the data
is under the normal operation (denoted by D
t
). After
the training on the normal operation data is done, the
reconstruction of this model should be the version of
the normal operation of the input. If the difference
between the input and the reconstruction input of the
model is high, that implies that the input data is in
a different distribution of the reconstruction data. In
other words, the input data is anomalous.
This model achieves the task by using the concept
of autoencoder where we aim to reconstruct any input.
The green block is used for the encoding part, and the
red-pink block is the fully-connected neural network
blocks that are used for the reconstruction of the in-
put. In the encoder block, the multi-head attention
and fully-connected layers are used along with layer
normalization and dropout. This is repeated N times
for the scalability of the complexity of the model.
Mathematically, suppose we have a data input x ∈
R
p
(or its isomorphic form like x ∈ R
a×b×c
∼
=
R
abc
)
from the dataset D = {(x
1
, y
1
), . . . (x
n
, y
n
)}, y
i
∈{0, 1}
that includes training data D
t
⊂ {(x, y) ∈ D|y = 0}
and validation data D
v
= D \D
t
and assume that la-
tent space from the embedding function f : R
p
→ R
m
is separable for each input x
i
given the label y
i
, that is,
data from both classes are discriminative or distinct
enough.
We can assume that the normal operation data
is mostly deterministic with recognizable stochastic
elements. Suppose the normal operation signal is
φ(t). Then, the sensor, if perfect, should be able to
fully capture the signal φ(t). However, as the sen-
sor is not perfect, we can model this as φ(t) + ε(t)
for measurement noise ε(t) ∼ T (θ, t) for some dis-
tribution T (θ, t). However, the faulty operation will
look different in either one of those as it will be
φ(t) + ω(t) + ε(t), which will have a different distri-
bution for the faulty condition if ω(t) has enough im-
pact. The assumption of discrimination can be used.
Now, suppose we create a model M that consists
of two parts: an embedding function f and a recon-
struction function g : R
m
→ R
p
. Given the training
data D
t
⊂ D where D
t
= {(x
i
, y
i
) | y
i
= 0}, the em-
bedding function f maps this data to the latent space:
Z
t
= {f (x
i
) | (x
i
, y
i
) ∈ D
t
} ⊂ R
m
Let ˆz ∈Z
t
be a sample from the region in the latent
space that is concentrated with normal operation data.
The reconstruction function g then maps ˆz back to the
input space: ˆx = g(ˆz)
Since ˆz is from the image of f given the training
data D
t
, the reconstruction ˆx should be similar to the
original data x in D
t
. Mathematically, this implies
that:
ˆx = g( f (x
i
)) ≈ x
i
for (x
i
, y
i
) ∈ D
t
(6)
Furthermore, we assume that normal operation
data x outside of the training set D
t
will be mapped
by f to a neighborhood of Z
t
in the latent space. De-
fine the ε-neighborhood of Z
t
as:
N
ε
(Z
t
) = {z ∈ R
m
| ∃z
t
∈ Z
t
such that ∥z −z
t
∥ < ε} (7)
We assume that for normal operation data x out-
side of D
t
:
f (x) ∈ N
ε
(Z
t
) for some ε > 0 (8)
This implies that for new normal operation data x,
the embedding f (x) lies within an ε-distance of the
region Z
t
in the latent space, ensuring that the recon-
struction g( f (x)) is similar to normal operation data.
This is possible due to our assumption that normal op-
eration data is mostly deterministic with predictable
stochastic elements. If the data is from the normal
operation, the difference should be mostly on the de-
terministic part, and if f is good enough, the distance
between the slight changes in value should be pre-
served.
Given the versatility and SOTA performance of
transformer models in various domains (Vaswani
et al., 2017; Raffel et al., 2020), it is reasonable to
explore the possibility that f can be implemented as
a transformer model. Transformers are capable of
generating high-quality embeddings due to their self-
attention mechanisms, which capture complex rela-
tionships and patterns in data (Vaswani et al., 2017).
Input
Preprocessing
Positional Encoding
Encoder
Decoder
Reconstruction
Multi-head
Attention
Fully
Connected
Fully
Connected
×N
×M
Figure 9: Architecture of TrAEAD Model.
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
470

However, it is important to note that while transform-
ers have shown surprising empirical results, claiming
that they will always preserve the distance for slight
alterations of data points in the embedding space is an
assumption that warrants further investigation. The
empirical result later from (Wu et al., 2023) shows
that the transformer model is a good fit for this task.
The transformer architecture is mainly drawn
from (Wu et al., 2023). The basic fully connected lay-
ers are linked with multi-head attention to form a ba-
sic transformer model. While the authors use classifi-
cation head on top of the transformer model to make
it a classification task, in this work, the alteration has
been done to make it a generative model to follow our
previous assumption about the behavior of our input.
For the reconstruction part g, the primary require-
ment is that the reconstruction error with respect to
the original data should be minimal. A simple neu-
ral network, such as a fully connected network, can
be used with an objective function to minimize this
reconstruction error. Given that our training data is
a subset of the dataset containing only normal op-
eration samples, the reconstruction error becomes a
key factor in anomaly classification. Specifically, if
the reconstruction error is high, it can imply that the
data point is out of the training distribution and, thus,
further from the neighborhood of the normal opera-
tion distribution. Therefore, it can be classified as an
anomaly. In this study, the mean squared error (MSE):
Error
t
=
1
|D
t
|
∑
(x
i
,y
i
)∈D
t
||x
i
−M(x
i
)||
2
(9)
is used as the reconstruction error. The definition
of ”high” can be determined in the model selection
phase, where metrics like Matthews’ correlation co-
efficient (MCC) can be used as the cutting point.
Specifically, the classification threshold that maxi-
mizes this metric would be the optimal threshold for
classification. In other words, the threshold T is given
by:
T = arg max
T ∈R
+
MCC(I(Error(x, M(x)) > T )) (10)
where the indicator function I classifies whether the
error between the true value x and the model’s predic-
tion M(x) exceeds the threshold T .
4.3.2 Model Inference Example
Here is a simple example to illustrate the idea of how
the model works. Suppose our input data is 3-axis
accelerations from the accelerometer. For the sake of
visualization, suppose we have a random vector R
3
for three-dimensional signals with four samples. Here
we have x ∈ R
3×4
data.
Preprocessing
This data is then fed to the pipeline as 4 data points
with three features each. That is for the signal
X =
1 0 1 1
1 1 0 1
0 1 1 1
is treated as
x
1
=
1 1 0
⊤
x
2
=
0 1 1
⊤
x
3
=
1 0 1
⊤
x
4
=
1 1 1
⊤
That is, we have three series of four or four lengths
with three features. Then, for the fixed length size l,
which is one of the hyperparameters of the prepro-
cessing, the preprocessing will process a token as a
group of vector (x
1
, . . . , x
l
), (x
l+1
, . . . , x
2l
), . . . . Sup-
pose that l = 2, then the first token for the model is
(x
1
, x
2
), and the second token of the model is (x
3
, x
4
).
It then will provide the positional encoding to each of
the tokens. Specifically,
PE(i, j) =
sin
i
10000
2
d
model
⌊
j
2
⌋
!
if j is even
cos
i
10000
2
d
model
⌊
j
2
⌋+
1
d
model
!
if j is odd
for the position i at dimension j = 0, . . . , d
model
. Here,
d
model
= 3. For the first token,
PE(1) =
0 1 0
⊤
PE(2) =
0.84147098 0.54030231 0.00215443
⊤
and second token
PE(3) =
0.90929743 −0.41614684 0.00430886
⊤
PE(4) =
0.14112001 −0.9899925 0.00646326
⊤
The first input token to the transformer then is (x
1
+
PE(1), . . . , x
l
+ PE(l)).
Classification
After getting the reconstruction M(X) = R
2
(R
1
(Z)),
given that the model is trained on the normal oper-
ation signal, the difference in input would be pro-
nounced if the input and reconstruction are from dif-
ferent distributions. In this case, the MSE between
M(X) and X defined in Equation (9) is 0.38840. If
the threshold from the training is larger than 0.38840,
then this would mean X is under normal operation.
However, if it is otherwise greater than the threshold,
it is an abnormally.
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal Vibration Sewage Treatment Plant Data
471
Transformer Model (Encoder)
Suppose that N = 1; this input will then pass through
the multi-head attention layer as outlined in (Vaswani
et al., 2017). This attention is then combined with
the input and passes through the fully connected layer.
Note that the fully connected network works for each
data point within the token. In other words, this fully
connected layer works with the R
3
vector for our ex-
ample. For the simplicity of explanation, let the out-
put for this model be the embedding in R
p
and let
p = 5. Suppose that the output for this encoder model
is
Z =
0.144 0.213 −0.115 0.821 1.110
Reconstruction (Decoder)
The series of fully connected networks in the decoder
will map R
p
→R
nd
model
for n data points. In this case,
it will map the embedding in R
p
to R
12
which is iso-
morphic with R
3×4
which is the original data dimen-
sion. Suppose our N = 2 and we have R
1
: R
5
→ R
8
then R
2
: R
8
→ R
12
For the sake of space, the R
8
will
be written as R
2×4
matrix and R
12
will be written as
R
3×4
.
The reconstruction will look like this
R
1
(Z) =
0.811 0.911 0.314 0.112
0.000 0.213 0.981 −0.772
R
2
(R
1
(Z)) =
0.811 0.591 0.994 0.991
−0.012 0.818 0.011 −0.772
0.012 0.995 0.892 0.742
5 EXPERIMENTAL STUDY
In these experiments, we are attempting to compare
the performance of reconstruction anomaly detection
from the (Wu et al., 2023) and (Yu et al., 2023)
models to various data fusion methods paired with
the TrAEAD model. These variations include test-
ing the raw time wave-form data, the PCA Groups
and PCA Directions methods, and the signal-averaged
PCA Groups and PCA Directions approaches. For
this comparison, we are focusing on metrics such as
MCC score, Accuracy, Precision, Recall, F1 Score,
Negative Predictive Value (NPV), and Specificity.
The assumption for the reconstruction approach
is that the input data from the anomalous and non-
anomalous sources should look different and signifi-
cant enough to define a threshold of the reconstruction
error to make a good classification decision. Using la-
beled data from the pumps at SCISTW, we are able to
assess the performance of anomaly detection.
Since the accuracy of our models is based on the
reconstruction error of the signals surpassing a prede-
fined threshold to label a vibration reading as anoma-
lous, the training set for this task only consists of data
from the normally operating pumps (Pumps 5 and 6).
This data was split into 80% training and 20% test-
ing data, consisting of the first and last 10% by date
recorded. The anomalous pump data from Pump 2
was reserved for testing.
The TrAEAD model reconstructs the signal well,
with an overall reconstruction error from all the test
signals of 0.01. However, the anomalous data has the
tendency to be reconstructed with the wrong ampli-
tude level. For the normal signal, the reconstruction
fails to match some of the ground truth signals but
manages to get the amplitude range correct.
As a baseline for comparison with the TrAEAD
model, the data was reconstructed using a hybrid re-
current layer structure such as the model introduced
by (Yu et al., 2023), originally intended for voiceprint
anomaly detection, adapted to work with the time-
waveform and spectrogram data, and the same recon-
struction error threshold was used to label anomalies.
Furthermore, the same experiment was repeated with
the original model proposed by (Wu et al., 2023).
Table 1 shows that while all models perform
well, the TrAEAD model with multimodal-feature
extraction tends to perform better overall compared
to the models by (Wu et al., 2023) and (Yu et al.,
2023). Though these other models slightly outper-
form TrAEAD in Precision, NPV, and Specificity, the
differences are marginal and don’t significantly affect
Table 1: Performance Comparison of Various Models.
Data Fusion Model MCC Acc. Prec. Rec. F1 NPV Spec.
Wavelet Scaleogram Wu et al. (2023) 0.940 0.978 1.000 0.919 0.957 0.971 1.000
Raw Data Yu et al. (2023) 0.921 0.962 1.000 0.943 0.971 0.898 1.000
Raw Data TrAEAD 0.945 0.978 1.000 0.919 0.958 0.971 1.000
PCA Groups TrAEAD 0.923 0.978 0.988 0.988 0.988 0.902 0.958
PCA Groups Sig. Avg. TrAEAD 0.955 0.993 0.993 0.993 0.993 0.958 0.958
PCA Directions TrAEAD 0.944 0.991 0.991 0.991 0.991 0.939 0.958
PCA Directions Sig. Avg. TrAEAD 0.966 0.995 0.995 0.995 0.995 0.959 0.979
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
472

the model’s overall value. TrAEAD’s higher Recall
and F1-score suggest it is better at identifying true
anomalies and reducing false negatives, with the PCA
Directions and Signal Averaging method producing
the best results.
6 SEWAGE PUMP MONITORING
SYSTEM PROTOTYPE
In order to host our META pipeline as well as visu-
alize the output of analyzing pump vibration data, a
web-based Sewage Pump Monitoring System was de-
signed and built.
The system’s backend was developed using Flask,
a lightweight WSGI web application framework that
provides tools for URL routing, request handling, and
template rendering (Grinberg, 2018). For this appli-
cation, Flask handles the upload and preprocessing of
sensor data files, performs feature extraction on the
raw sensor data, and exposes RESTful API endpoints
that the frontend can interact with.
The frontend of the application, on the other hand,
was built with React, a component-based JavaScript
library for building user interfaces (Banks and Por-
cello, 2017). It integrates the backend APIs using
asynchronous HTTP requests through libraries like
Axios, and allows for the incorporation of visualiza-
tion libraries such as Chart.js to display sensor data.
In this interface, the user is able to select and up-
load sensor data files with vibration data. This data is
then processed through the META pipeline, from sig-
nal averaging, to multimodal feature extraction, and
finally passed through the transformer-based autoen-
coder model. The output of this process is then dis-
played visually, organized by sensor, in a graph of
amplitude versus time that shows three different lines
for each dimension of the original data (Axial [pink],
Radial X [blue], and Radial Y [green]) and marks
the dates in which anomalies in the operation of the
pumps are detected. The spans of consecutive data
entries with anomalous data points are marked in a
bright red color, which is toggle-able alongside the
individual data from each of the input dimensions. A
sample output for this process is shown in Figure 10.
7 CONCLUSION AND FUTURE
WORK
In this paper, we propose a hybrid anomaly
detection platform, called META, which inte-
grates Multimodal-feature Extraction (ME) and a
Transformer-based Autoencoder (TA) to leverage the
strengths of the existing methodologies for predic-
tive maintenance of sewage treatment plants. We
first developed a signal averaging method that can
preprocess the raw data using the signal processing
algorithms to remove unrelated noise and improve
the quality of signals related to the pump health and
operations. Second, we enhanced the existing ME
method to extract the meaningful signal properties on
three vibration signal directions (Axial, Radial X, and
Radial Y), respectively, by using five computational
methods and measures and then fusing them together
using PCA to generate PCA feature sets. Third, we
enhanced a TA model to learn pump behavior from
the extracted PCA feature sets to detect anomalous
Figure 10: Sample GUI Output for the anomalous data, marked in red, from Pump No.2.
META: Deep Learning Pipeline for Detecting Anomalies on Multimodal Vibration Sewage Treatment Plant Data
473

behavior over time with high precision. Fourth, we
conducted an extensive experimental case study on
the SCISTW, located in Hong Kong, to demonstrate
that our META platform achieves SOTA performance
in terms of MCC, F1-score, Accuracy, Precision, Re-
call, Negative Predictive Value, and Specificity. Fi-
nally, we built a prototype web-based Sewage Pump
Monitoring System hosting the entire pipeline, pro-
viding an interactive user interface for future use.
Further research is needed to validate the versa-
tility and robustness of the META framework. As-
sessing META’s performance in anomaly detection
for other types of industrial machinery as well as ex-
ploring different types of data fusion techniques could
increase confidence in such a hybrid platform. For
instance, examining late fusion techniques, in which
the feature integration occurs at a later stage, right
before the model makes a decision, could yield in-
teresting insights into the system’s performance. Fur-
thermore, investigating the incorporation of other ma-
chine learning models with transformers and examin-
ing their impact on anomaly detection could lead to
the development of more robust and scalable predic-
tive maintenance approaches.
REFERENCES
Banks, A. and Porcello, E. (2017). Learning React:
Functional Web Development with React and Redux.
O’Reilly Media, Inc.
Carson, S. (2011). Best practice for lift stations:
predictive maintenance or ”run to fail”? On-
line: https://www.pumpsandsystems.com/
best-practice-lift-stations-predictive-maintenance-or-run-fail.
Diez-Olivan, A., Ser, J. D., Galar, D., and Sierra, B. (2019).
Data fusion and machine learning for industrial prog-
nosis: Trends and perspectives towards industry 4.0.
Information Fusion, 50:92–111. Full Length Article.
Drainage Services Department (2009a). Stonecutters
Island Sewage Treatment Works. Online: https:
//www.dsd.gov.hk/TC/Files/publications publicity/
publicity materials/leaflets booklets factsheets/
Stonecutter.pdf. Last accessed on January 27, 2024.
Drainage Services Department (2009b). Stonecutters
Island Sewage Treatment Works under Harbour
Area Treatment Scheme Stage 2A. Online: https:
//www.dsd.gov.hk/EN/Files/publications publicity/
publicity materials/leaflets booklets factsheets/
HATS2A Brochure REV15.pdf. Last accessed on
January 27, 2024.
Faisal, M., Muttaqi, K. M., Sutanto, D., Al-Shetwi, A. Q.,
Ker, P. J., and Hannan, M. (2023). Control technolo-
gies of wastewater treatment plants: The state-of-the-
art, current challenges, and future directions. Renew-
able and Sustainable Energy Reviews, 181:113324.
Available online 3 May 2023, Version of Record 3
May 2023.
Grinberg, M. (2018). Flask Web Development: Developing
Web Applications with Python. O’Reilly Media, Inc.
Lahnsteiner, J. and Lempert, G. (2007). Water management
in windhoek, namibia. Water Science and Technology,
55(1-2):441–448.
Lee, H. and Tan, T. P. (2016). Singapore’s experience with
reclaimed water: Newater. International Journal of
Water Resources Development, 32(4):611–621.
Newton, E. (2021). Predictive maintenance for pump oper-
ations — modern pumping today.
Ormerod, K. J. and Silvia, L. (2017). Newspaper cov-
erage of potable water recycling at orange county
water district’s groundwater replenishment system,
2000–2016. Water, 9(12):984. This article belongs
to the Special Issue Development of Alternative Wa-
ter Sources in the Urban Sector.
Pang, S., Yang, X., Zhang, X., and Lin, X. (2020). Fault
diagnosis of rotating machinery with ensemble ker-
nel extreme learning machine based on fused multi-
domain features. ISA Transactions, 98:320–337.
Raffel, C., Shazeer, N., Roberts, A., Lee, K., Narang, S.,
Matena, M., Zhou, Y., Li, W., and Liu, P. J. (2020).
Exploring the limits of transfer learning with a unified
text-to-text transformer. J. Mach. Learn. Res., 21(1).
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł. and Polosukhin, I.
(2017). Attention is all you need. In Proceedings
of the 31st International Conference on Neural Infor-
mation Processing Systems (NIPS 2017), Long Beach,
CA, USA. Curran Associates Inc. [Google Scholar].
Wang, G., Zhao, Y., Zhang, J., and Ning, Y. (2021). A novel
end-to-end feature selection and diagnosis method for
rotating machinery. Sensors, 21(6).
Wu, H., Triebe, M. J., and Sutherland, J. W. (2023). A
transformer-based approach for novel fault detection
and fault classification/diagnosis in manufacturing: A
rotary system application. Journal of Manufacturing
Systems, 67:439–452.
Yu, D., Zhang, W., and Wang, H. (2023). Research on trans-
former voiceprint anomaly detection based on data-
driven. Energies, 16(5).
Yuan, Z., Zhang, L., and Duan, L. (2018). A novel fu-
sion diagnosis method for rotor system fault based on
deep learning and multi-sourced heterogeneous mon-
itoring data. Measurement Science and Technology,
29(11):115005.
NCTA 2024 - 16th International Conference on Neural Computation Theory and Applications
474
