
Precise Estimation of Urban Vegetation Carbon Stock Using Multi-
Source LiDAR: A Case Study of East China Normal University
Haoyang Song
1
a
1
School of Geographic Sciences, East China Normal University, Shanghai, China
Keywords: LiDAR. Carbon Stock, Tree Segmentation, Average Biomass Method
Abstract: With the intensification of global climate change, accurately estimating vegetation carbon stock has become
one of the keys to achieving carbon neutrality. This study combines multi-source LiDAR data and empirical
carbon stock formulas to propose a comprehensive and reliable technical framework for the fine estimation
of urban vegetation carbon stock. This framework includes: LiDAR data preprocessing, shrub extraction and
volume calculation, tree segmentation, and carbon stock calculation. In particular, the study compares various
commonly used tree segmentation algorithms and uses the layer stacking algorithm for tree segmentation in
the study area, ultimately obtaining the total carbon stock in the study area to be 2,677,442.666 kg. Overall,
this technical framework can effectively improve the accuracy and efficiency of traditional urban vegetation
carbon stock estimation, providing technical support and data foundation for achieving carbon neutrality.
1 INTRODUCTION
Research on the carbon cycle in urban ecosystems has
become a focal point in climate change mitigation
strategies. Urban carbon storage is primarily
composed of trees and shrubs, both playing an
irreplaceable role in improving the living
environment, maintaining ecological security, and
achieving sustainable urban development (Creutzig et
al., 2016). Traditionally, estimation of urban carbon
stocks relied on field measurements. However, this
method is highly subjective and laborious (Zhang et
al., 2015). Meanwhile, although high-resolution
satellite remote sensing images have significant
spectral characteristics and rich texture information,
they failed to provide data below the canopy and
neglected the vertical spatial structure differences of
vegetation, resulting in a lower accuracy in carbon
stock estimation.
The rise of LiDAR (Light Detection and Ranging)
technology has provided robust technical support for
fine carbon stock estimation. LiDAR is characterized
by its high resolution, strong penetrative ability, and
high efficiency, allowing for the convenient
acquisition of accurate three-dimensional structural
information of urban vegetation. Additionally,
a
https://orcid.org/0009-0000-5656-1649
LiDAR operates effectively under various
environmental conditions and offers high precision
and high-density data collection capabilities.
Since the majority of urban carbon storage comes
from trees. Therefore, the accuracy of carbon stock
estimation based on LiDAR largely depends on the
precision of tree segmentation (Mei and Durrieu,
2004). Current tree segmentation algorithms can be
primarily divided into two categories: tree
segmentation based on Canopy Height Model(CHM)
or point clouds.
For CHM-based tree segmentation, Hyyppä et al.
(2001) were the first to apply the region-growing
algorithm to the segmentation of LiDAR data in
Nordic coniferous forests. Mei & Durrieu (2004)
achieved a 90% accuracy using the watershed
algorithm for tall and regularly spaced trees, but faced
challenges of over-segmentation or under-
segmentation in complex and dense forests. Koch et
al. (2006) employed the flooding algorithm to
segment coniferous and deciduous forests in
Germany, achieving an accuracy of 61.7%. Chen et
al. (2006) proposed a marker-controlled watershed
tree segmentation algorithm, tested with an accuracy
of 64.1% in the savannas of California, USA.
Khosravipour et al. (2014) enhanced upon Chen et
al.'s algorithm by removing CHM pits through
Song, H.
Precise Estimation of Urban Vegetation Carbon Stock Using Multi-Source LiDAR: A Case Study of East China Normal University.
DOI: 10.5220/0013035300004601
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Innovations in Applied Mathematics, Physics and Astronomy (IAMPA 2024), pages 201-208
ISBN: 978-989-758-722-1
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
201
overlapping point cloud subsets, achieving a
segmentation accuracy of 74.2%. Besides, Kaartinen
et al. (2012) introduced two new methods: multi-scale
Gaussian Laplacian segmentation and CHM
minimum curvature segmentation. Overall, CHM-
based tree segmentation runs fast, although the
interpolation process and canopy cover of tall trees
can affect the results.
Tree segmentation algorithms based on point
clouds are more straightforward, avoiding potential
errors that may arise during CHM generation.
Nevertheless, these methods require substantial
computational resources and high-performance
hardware. Early studies such as Morsdof et al. (2004)
were the first to apply k-means clustering for tree
segmentation, demonstrating the feasibility of this
approach. Li et al. (2012) introduced a region-
growing algorithm combined with threshold
judgment, achieving an accuracy of 0.9 in California,
USA, but the segmentation accuracy of this algorithm
in deciduous forests was lower. Lu et al. (2014)
introduced a bottom-up region-growing algorithm
that marked trunk points and allocated distances
topologically, achieving a recall rate of 0.84 and an
accuracy of 0.97 in the deciduous forests of
Pennsylvania, USA. Lin et al. (2017) used circle
detection theory to extract individual tree locations,
heights, and diameters at breast height, achieving an
accuracy of over 90%. Aryey et al. (2017) developed
layer stacking algorithm that clusters point clouds at
1-meter intervals, performing better than traditional
algorithms in deciduous or leafless conditions. Paris
et al. (2016) explored a combined method using CHM
and point cloud space, accurately segmenting
dominant trees by analyzing horizontal and vertical
profiles of the point cloud, achieving an accuracy
exceeding 92%.
This study utilizes multi-source LiDAR data to
test and compare several commonly used tree
segmentation algorithms, with the aim of proposing a
comprehensive and reliable technical process for fine
estimation of urban vegetation carbon stock. The
results aim to serve as a guideline for future urban
planning and sustainable development endeavors.
This article is organized as follows: Section 2 will
show the materials and methods in this research,
Section 3 will display all the results and analysis, and
Section 4 will provide the discussion and conclusions.
2 MATERIALS AND METHODS
2.1 Study Area
Study area in this research is East China Normal
University (Minhang Campus), which is located on
No. 500 Dongchuan Rd., Minhang District, Shanghai,
China(Figure 1). Due to the large size of the study
area, the campus is divided into eight zones based on
the road, river, and vegetation characteristics. The
campus is rich in tree species, dominated by camphor,
bellflower, ginkgo, and luan. Also, it contains a
variety of deciduous small trees. In terms of shrubs,
they mainly composed of buxus sinica and
rhododendron.
Figure 1: Study area (Picture credit: Original)
2.2 Data Source
This study contains three parts of LiDAR data,
namely airborne, vehicle-mounted and backpack
LiDAR. The detailed information of each data type is
shown in Table 1 and data samples are shown in
Figure 2.
Table 1: Detailed information of different types of LiDAR data
Data Type
Acquisition
Device
Coordinate
System
Point
Density
File
Format
File
Size(G)
Range
Airborne
ECNU-ULS
UTM Zone 51N
Low
las
3.1
Entire campus
Vehicle-
mounted
ECNU-MLS UTM Zone 51N High las 13.7
Main roads
only
Backpack LiBackpack C50
Relative
coordinates
High ply 19.8 Entire campus
IAMPA 2024 - International Conference on Innovations in Applied Mathematics, Physics and Astronomy
202
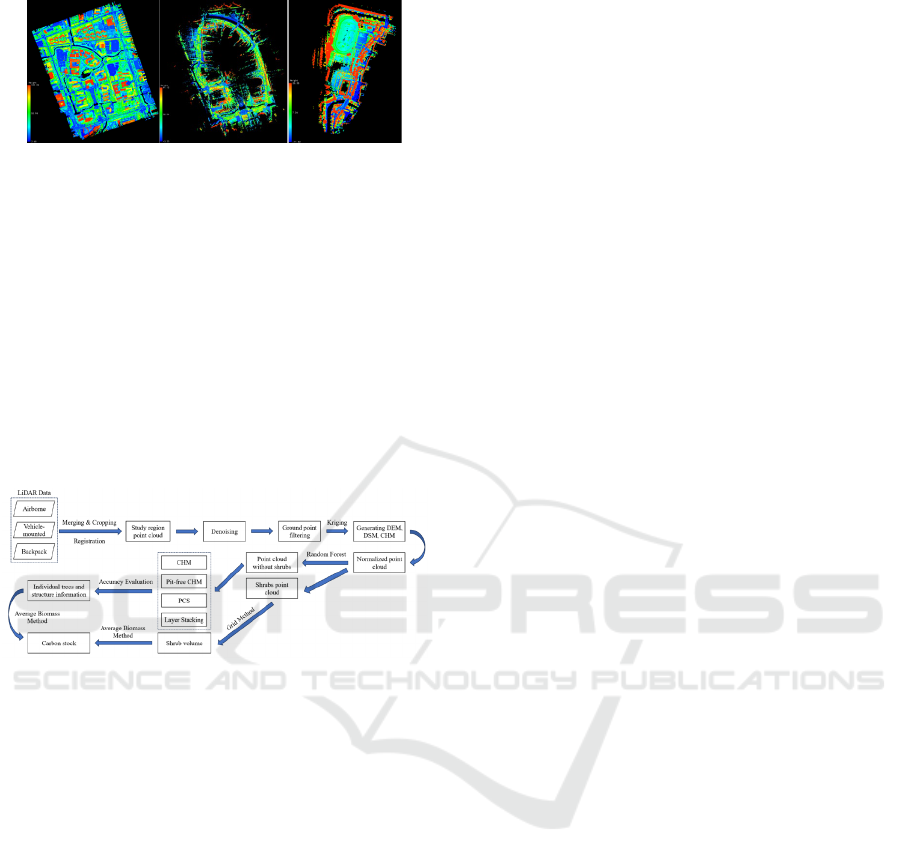
(a) (b) (c)
Figure 2: Sample LiDAR data: (a) Airborne LiDAR
(entire campus area); (b) Vehicle- mounted
LiDAR(main roads only); (c) Backpack LiDAR(part
of Zone 5) (Picture credit: Original)
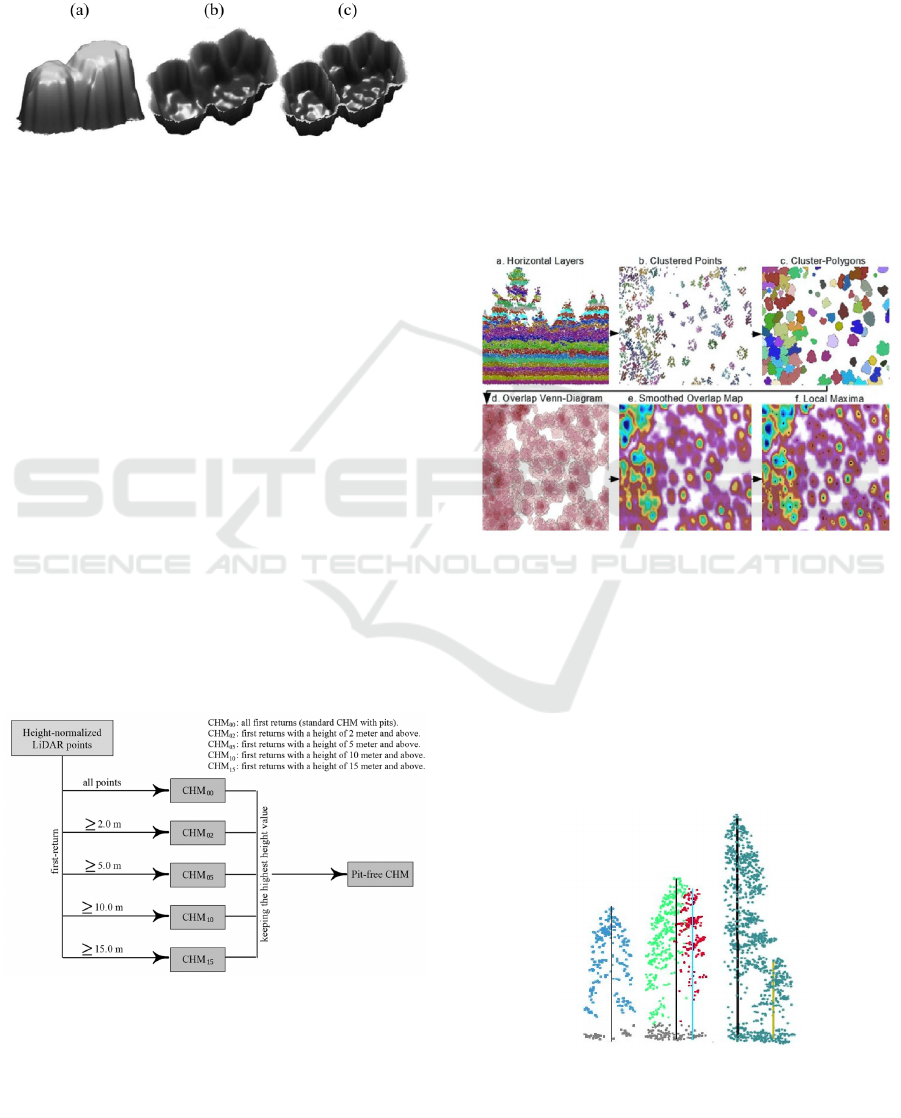
2.3 Technical Framework
The study harnesses multi-source LiDAR data and
proposes a reliable technical framework for fine
estimation of urban carbon stock. Four steps are
involved in the technical framework (Figure 3),
namely LiDAR data preprocessing, shrub extraction
and volume calculation, tree segmentation methods
and carbon stock calculation.
Figure 3: Techinical framework of the research
(Picture credit: Original)
2.4 LiDAR Data Preprocessing
The LiDAR data preprocessing includes: 1) Multi-
source data registration to UTM Zone 51N coordinate
system, 2) Data merging and cropping, 3) LiDAR
denoising, 4) Ground point filtering, 5) Kriging
interpolation to generate DEM, DSM and CHM with
the pixel size of 0.1m, 6)Point cloud normalization.
In this study, traditional automatic registration
methods(e.g. Iterative Closest Point) are less effective
due to the disparity in point density between aerial
LiDAR data and other two forms of data. Therefore,
in this study, a stepwise minimum spanning tree
matching algorithm based on quadrant search is
utilized for point cloud registration.
The algorithm primarily involves of three steps:
extraction of tree locations, quadrant search-based
minimum spanning tree matching, and registration.
As the airborne and vehicle-mounted LiDAR data
already had UTM coordinates, only the
transformation matrix from backpack LiDAR data to
UTM coordinates needs to be calculated. Firstly, the
tree location points collected from the three LiDAR
data are extracted, and then matched based on the
topological similarity of the minimum spanning tree
connected into a quadrant search, and matched by
stepwise search, finally realizing the fusion of the
LiDAR data collected by three different sensors.
2.5 Shrub Extraction and Volume
Calculation
Shrubs constitute a crucial component of urban
vegetation, playing an essential role in the calculation
of urban carbon stock. The extraction of shrubs from
the point cloud data was accomplished using the
random forest algorithm, integrated within the
LiDAR360 software. By manually selecting a small
number of representative shrub point clouds to train
the model and applying the model to the remaining
data, all shrubs in the point cloud can be obtained.
This approach substantially reduces the labor-
intensive and time-consuming nature of manual
selection.
The calculation of shrub volume uses the grid
method, which is conceptually similar to calculus.
Specifically, the process begins by projecting 3D
point cloud data onto a 2D plane Then, the 2D plane
is divided into small cells using a grid structure. The
tallest point in each grid is recorded, multiplying by
the grid cell size gives the volume of the shrub within
that cell. The overall volume of shrub is calculated by
adding the volumes of all the grid cells.
Therefore, the choice of grid size largely
determines the accuracy of the result volume. If the
grid is too small, many grid cells might fall into gaps
between point cloud data points, leading to an
underestimated volume, and vice versa. Thus, the
selection of grid size should primarily be based on
point density. Since shrubs in LiDAR data are
primarily detected by high-density backpack LiDAR
and vehicle-mounted LiDAR, a grid size of 0.1m is
chosen for this study.
2.6 Tree Segmentation Methods
This study evaluated and compared four common tree
segmentation methods: two region-based
segmentation methods using CHM and pit-free CHM,
region-growing and threshold judgment algorithm
(PCS), and Layer Stacking algorithm which both
directly based on point cloud.
1) CHM (Chen et al., 2006)
The Watershed Algorithm is used for CHM based
segmentation (Figure 4). It is mainly based on the
concept of immersion simulation. It first takes the
Precise Estimation of Urban Vegetation Carbon Stock Using Multi-Source LiDAR: A Case Study of East China Normal University
203
complement of the CHM, where each local minimum
represents a tree height point, and its influence area is
called a catchment basin (the extent of the tree crown).
At the junction of catchment basins, a dam is
constructed to form the watershed that segments the
tree crowns, thereby isolating individual trees.
Figure 4: Watershed Algorithm (Picture credit:
Original)
2) Pit-free CHM (Khosravipour et al., 2014)
However, black holes can form in the CHM as a
result of some laser pulses passing through the tree
crowns and reflecting back from the ground due to
LiDAR's great penetration into the canopy. This
phenomenon leads to an incomplete canopy surface
and is referred to as pits.
Khosravipour et al. (2014) introduced a technique
for generating pit-free CHM (Figure 5): First, an
initial CHM (CHM00) is established. The normalized
point cloud is then vertically stratified according to
the ASPRS point cloud classification standards: low
vegetation (0.5m < h ≤ 2.0m), medium vegetation
(2.0m < h ≤ 5.0m), and high vegetation (h > 5.0m).
For high vegetation, further stratification is done at 5-
meter intervals. This results in the construction of
CHMs for each layer (CHM02, CHM05, CHM10, ...).
Finally, the CHMs of all layers are stacked, with each
pixel in the result taking the maximum value of the
corresponding x, y pixel position from all the layers,
thereby generating a pit-free CHM and using the
Watershed Algorithm for tree segmentation.
Figure 5: Methods for generating Pit-free CHM
Picture credit: Khosravipour et al., 2014
1
3) PCS (Li et al., 2012)
PCS algorithm makes the assumption that the tree
apex is the local highest point in the LiDAR data. This
point is used as a seed for region growing through
iterative expansion. During each iteration, a threshold
is used to determine whether a point belongs to an
existing tree or represents a new tree apex. Points
farther from the existing tree than the threshold are
assigned to a new tree; points closer are categorized
under the existing tree.
4) Layer Stacking (Ayrey et al., 2017)
Main steps of the Layer Stacking Algorithm are
shown in Figure 6: (a) Vertically segment the point
cloud starting from 0.5 meters with a certain interval
(generally 1m) up to the highest point. (b) Applying
K-means clustering algorithm to each layer. (c)
Creating a 0.5m buffer polygon around each cluster.
(d) Overlaying polygons of each layers. (e)
Smoothing the overlap result using a window size of
1.5m. (f) Detecting the local maxima, which represent
the center of the tree.
Figure 6: Main steps of Layer Stacking algorithm
Picture credit: Ayrey et al., 2017
2
There are three types of segmentation results
(Figure 7): 1) True Positive (TP): The quantity of
properly segmented trees. 2) False Positive (FP): The
quantity of excessively segmented trees. 3) False
Negative (FN): The quantity of unsegmented trees
that are wrongly believed to be a component of other
trees. To evaluate the accuracy of various tree
segmentation methods on sample plots, the study
used the following formulas to compute recall(r),
precision(p), and F-score(F).
Figure 7: Three different types of segmentation
results: (a) TP, (b) FP, (c) FN
Picture credit: Original
IAMPA 2024 - International Conference on Innovations in Applied Mathematics, Physics and Astronomy
204

=
(1)
=
(2)
= 2 ×
×
(3)
2.7 Carbon Stock Calculation
After the tree segmentation process is finished,
LiDAR360 may use the segmentation data to
automatically determine each tree's diameter at breast
height (DBH), crown width, tree height, and crown
volume.
Carbon stock was calculated using the average
biomass method of the sample plot inventory method,
which is suitable for small to medium-scale plant
biomass calculation in this study. Meanwhile, the
anisotropic biomass growth equation is crucial for the
measurement of carbon stock in trees. In order to
guarantee the scientific validity of the carbon stock
findings, the study selected common tree species in
the campus, and constructed the biomass model of
each tree species according to the local and adjacent
areas of Shanghai. The carbon content coefficient was
selected based on the average carbon content
coefficient for forest trees, which is 0.5, as published
by the IPCC. Finally, the following formulas were
derived for calculating carbon stock in an individual
tree (Zhong et al, 2019).
Soft broadleaf trees:
= 0.01901
.
(4)
Hard broadleaf trees:
= 0.10387
.
(5)
Coniferous:
= 0.01639
.
.
+
0.06539
.
.
(6)
Carbon stock of trees:
=
(7)
In the formula, C, W, D, H, α respectively
represent the carbon stock of trees, biomass, DBH,
tree height and carbon content coefficient (0.5).
For the calculation of shrub carbon stock,
considering that the distribution of shrubs on the
campus is heterogeneous and difficult to distinguish,
this study referenced the optimal models from
previous research on the relationship between canopy
volume and annual branch biomass of different
shrubs in Shanghai. The study chose the common
shrubs on the campus (Buxus sinica and
Rhododendron) as the representative shrubs and
averaged their carbon stock models to calculate the
carbon stock of all shrubs on the campus (Fang, 2013).
Shrubs:
=
.×
.
.×
.
× 0.5
(8)
Carbon stock of shrubs:
=
(9)
In the formula, C, W, V, α respectively represent
the carbon stock of shrubs, biomass, shrub volume
and carbon content coefficient (0.5).
3 RESULTS
3.1 Selecting the Best Tree
Segmentation Method
A total of six sample plots (four broadleaf and two
coniferous) were selected in this research to evaluate
the four segmentation methods’ accuracy, and the
results are shown in Table 2.
Table 2: Accuracy evaluation results of different segmentation algorithms (Picture credit: Original)
Sample plot
ID
Segmentation
algorithm
Actual
trees
Segment
Trees
TP FN FP r p F
1
Broadleaf
Layer stacking
40
42
33
7
9
.825
.788
.805
PCS
50
27
13
23
.675
.540
.600
CHM
52
22
18
30
.550
.423
.478
Pit-free CHM
47
31
9
16
.775
.660
.713
2
Broadleaf
Layer stacking
58
53
43
15
10
.741
.811
.775
PCS
66
39
19
27
.672
.591
.629
CHM
58
33
25
25
.569
.569
.569
Pit-free CHM
51
39
19
12
.672
.765
.716
3
Broadleaf
Layer stacking
40
40
32
8
9
.800
.780
.790
PCS
34
20
20
14
.500
.588
.541
CHM
43
25
15
18
.625
.581
.602
Pit-free CHM
41
28
12
13
.700
.683
.691
Precise Estimation of Urban Vegetation Carbon Stock Using Multi-Source LiDAR: A Case Study of East China Normal University
205

4
Broadleaf
Layer stacking
61
59
48
13
11
.787
.814
.800
PCS
60
41
20
19
.672
.683
.678
CHM
71
33
28
38
.541
.465
.500
Pit-free CHM
64
38
23
26
.623
.594
.608
5
Coniferous
Layer stacking
100
95
88
12
7
.880
.926
.903
PCS
53
23
47
30
.329
.434
.374
CHM
113
84
16
29
.840
.743
.789
Pit-free CHM
101
91
9
10
.910
.901
.905
6
Coniferous
Layer stacking
72
69
64
8
5
.889
.928
.908
PCS
40
40
29
43
11
.403
.725
CHM
85
85
62
10
23
.861
.729
Pit-free CHM
74
74
67
5
7
.917
.892
Sample plots 1-4 are broadleaf forest plots. Due
to the uncertainty and complexity of the canopy
morphology of broadleaf tree, the highest overall
accuracy was only 80.5%. According to the F-score
results from different segmentation methods, layer
stacking can achieve around 80% accuracy even
when facing the challenges of varied morphology,
multiple branches, and numerous vertices of
broadleaf tree species. This method provides the best
overall segmentation performance, followed by pit-
free CHM, PCS, and CHM.
Sample plots 5-6 are dense coniferous forest
samples on the southeast side of the campus.
Compared to broadleaf plots, the morphological
differences in coniferous tree species are smaller,
allowing for a maximum overall accuracy of up to
90.8%. Based on the F-score results from different
segmentation methods, both layer stacking and pit-
free CHM provided the best segmentation
performance, each achieving over 90% accuracy.
However, in the densely populated coniferous forest
areas of the campus, the PCS algorithm performed the
poorest with an accuracy of only 37.4%. This is
because the distance threshold =1.5, which is
relatively more suitable for broadleaf plots, failed to
segment the closely spaced coniferous trees, resulting
in very poor segmentation results.
Therefore, in the tree segmentation task for urban
trees, the layer stacking algorithm should be
prioritized in areas with diverse and unstable tree
morphology, such as broadleaf areas or mixed
broadleaf-coniferous areas. In areas with stable tree
morphologies, such as coniferous areas, the faster pit-
free CHM segmentation method should be preferred.
3.2 Number of Trees Segmented and
Shrub Volume in Each Zone
Since the campus is dominated by broadleaf trees,
layer stacking method was chosen for tree
segmentation. The results of the number of trees and
shrub volume obtained in each area of the campus are
shown in Table 3.
Table 3: Number of tree segmented and shrub
volume in each zone (Picture credit: Original)
Zone ID Segment Trees Shrub Volume(m
3
)
1 741 2861.840
2 1921 2866.460
3 1283 6910.606
4 1092 6602.009
5 1336 6539.478
6 711 4881.820
7 748 4355.723
8 600 2953.506
3.3 Carbon Stock Calculation and
Analysis
After substituting the shrub volume and the
morphological parameters of each tree into the carbon
stock equation, the carbon stock results for each area
can be calculated and shown in Table 4.
Table 4: Summary of carbon stock (Picture credit:
Original)
Zone
ID
Total carbon
stock(kg)
Tree carbon
stock(kg)
Shrub
carbon
t k(k )
1 256138.422 256130.744 7.678
2 83378.314 83370.632 7.682
3 446909.511 446893.057 16.454
4 377898.048 377877.747 20.301
5 735757.340 735746.870 10.470
IAMPA 2024 - International Conference on Innovations in Applied Mathematics, Physics and Astronomy
206

6 239094.774 239085.395 9.379
7 259546.127 259537.141 8.986
8 278720.130 278712.361 7.769
Total 2677442.666 2677353.950 88.719
To analyze the spatial distribution of carbon stock
within the campus, the study drew a carbon stock map
under the 50m×50m grid (Figure 8(a)) and the map of
carbon stock density in different zones (Figure 8(b)).
There are significant differences in the size and
density of carbon storage across various campus areas.
Generally, the carbon stock is smaller in areas with
dense buildings and open areas (e.g. playgrounds),
and the larger carbon stock is mainly in areas where
trees are concentrated (e.g. both sides of the main
road and the green spaces).
Figure 8: (a) Carbon stock map under 50m×50m
Grid, (b) Carbon stock density in different zones
Picture credit: Original
4 CONCLUSION
This study establishes a comprehensive and reliable
technical framework for the fine estimation of urban
vegetation carbon stock by utilizing multi-source
LiDAR data. This framework includes following
steps: This framework includes: LiDAR data
preprocessing, shrub extraction and volume
calculation, tree segmentation, and carbon stock
calculation. Specifically, after data preprocessing, the
study first uses a random forest model to extract
shrubs from the point cloud and employs a grid
method to calculate their volume. Subsequently, by
comparing four different tree segmentation
algorithms across six sample plots, the layer stacking
algorithm, which demonstrates superior accuracy and
stability in both coniferous and broad-leaved forests,
is selected for tree segmentation in the study region.
After obtaining the morphological parameters of
individual trees, the study builds biomass models
suitable for the vegetation in the study area using the
average biomass method, and calculates the final
carbon storage to be 2,677,442.666 kg.
The technical framework proposed in this study is
universally applicable to the accurate estimation of
urban vegetation carbon stock. Additionally, due to
the rich semantic information contained in LiDAR
data, the research data (such as the morphological
parameters of individual trees) can be widely applied
to other forestry applications. This provides technical
and data support for helping achieve dual carbon
goals and formulate related policies.
However, this study also has certain limitations.
The formulae used to calculate carbon stocks for
different species of trees may vary, and the study's
lack of species differentiation may have contributed
to some degree of error in the carbon stock conclusion.
Future research could consider incorporating street
view images or high-resolution remote sensing
images for tree species identification, thus building
biomass models for different species and further
refining the precision of carbon stock calculations.
REFERENCES
Ayrey, E., Fraver, S., Kershaw Jr, J. A., Kenefic, L. S.,
Hayes, D., Weiskittel, A. R., & Roth, B. E. (2017).
Layer stacking: A novel algorithm for individual forest
tree segmentation from LiDAR point clouds. Canadian
Journal of Remote Sensing, 43(1), 16-27.
2
Chen, Q. , Baldocchi, D. , Gong, P. , & Kelly, M. (2006).
Isolating individual trees in a savanna woodland using
small footprint lidar data. Photogrammetric
Engineering and Remote Sensing, 72(8), 923-932.
Creutzig, F., Agoston, P., Minx, J. C., Canadell, J. G.,
Andrew, R. M., Le Quéré, C., Peters, G. P., Sharifi, A.,
Yamagata, Y., & Dhakal, S. (2016). Urban
infrastructure choices structure climate solutions.
Nature Climate Change, 6(12), 1054-1056.
Fang, Y. H. (2013). Carbon sequestration and its
relationship with leaf functional traits: a study of 25
greening shrubs in Shanghai. Master’s thesis, East
China Normal University.
Kaartinen, H., Hyyppä, J., Yu, X. W., Vastaranta, M.,
Hyyppä, H., Kukko, A., Holopainen, M., Heipke, C.,
Hirschmugl, M., Morsdorf, F., Næsset, E., Pitkänen, J.,
Popescu, S., Solberg, S., Wolf, B. M., & Wu, J. C.
(2012). An International Comparison of Individual Tree
Detection and Extraction Using Airborne Laser
Scanning. Remote Sensing, 4(4), 950-974.
Khosravipour, A., Skidmore, A. K., Isenburg, M., Wang, T.,
& Hussin, Y. A. (2014). Generating pit-free canopy
height models from airborne lidar. Photogrammetric
Engineering and Remote Sensing, 80(9), 863-872.
1
Koch, B., Heyder, U., & Weinacker, H. (2006). Detection
of individual tree crowns in airborne lidar data.
Precise Estimation of Urban Vegetation Carbon Stock Using Multi-Source LiDAR: A Case Study of East China Normal University
207

Photogrammetric Engineering and Remote Sensing,
72(4), 357-363.
Hyyppä, J., Kelle, O., Lehikoinen, M., & Inkinen, M.
(2001). A segmentation-based method to retrieve stem
volume estimates from 3-D tree height models
produced by laser scanners. IEEE TRANSACTIONS ON
GEOSCIENCE AND REMOTE SENSING, 39(5), 969-
975.
Li, W., Guo, Q., Jakubowski, M.K., & Kelly, M. (2012). A
New Method for Segmenting Individual Trees from the
Lidar Point Cloud. Photogrammetric Engineering and
Remote Sensing, 78, 75-84.
Lin, Y., Ji, H. W., & Ye, Q. (2017). Research on method of
extracting single tree characteristics from LiDAR point.
Computer Measurement & Control, 25(06), 142-147.
Lu, X. C., Guo, Q. H., Li, W. K., & Flanagan, J. (2014). A
bottom-up approach to segment individual deciduous
trees using leaf-off lidar point cloud data. ISPRS
Journal of Photogrammetry and Remote Sensing, 94, 1-
12.
Mei, C., & Durrieu, S. (2004). Tree crown delineation from
digital elevation models and high resolution imagery.
International Archives of Photogrammetry, Remote
Sensing and Spatial Information Sciences, 36.
Morsdorf, F., Meier, E., Kötz, B., Itten, K. I., Dobbertin, M.,
& Allgöwer, B. (2004). LIDAR-based geometric
reconstruction of boreal type forest stands at single tree
level for forest and wildland fire management. Remote
Sensing of Environment, 92(3), 353-362.
Paris, C., Valduga, D., & Bruzzone, L. (2016). A
Hierarchical Approach to Three-Dimensional
Segmentation of LiDAR Data at Single-Tree Level in a
Multilayered Forest. IEEE TRANSACTIONS ON
GEOSCIENCE AND REMOTE SENSING, 54(7), 4190-
4203.
Zhang, C. Y., Zhou, Y. H., & Qiu, F. (2015). Individual
Tree Segmentation from LiDAR Point Clouds for
Urban Forest Inventory. Remote Sensing, 7(6), 7892-
7913.
Zhong, Q. C., Fu, Y.,& Zhang, G. L. (2019). Biomass
estimation and a dynamic analysis of forests in
Shanghai. Journal of Zhejiang A & F University, 36(03),
524-532.
IAMPA 2024 - International Conference on Innovations in Applied Mathematics, Physics and Astronomy
208
