
A Comparative Analysis of Methods for Hand Pose Detection in 3D
Environments
Jorge G. Iglesias
1 a
, Luis Montesinos
1,2 b
and David Balderas
1,2 c
1
School of Engineering and Sciences, Tecnologico de Monterrey, Mexico City, Mexico
2
Institute of Advanced Materials for Sustainable Manufacturing, Tecnologico de Monterrey, Mexico City, Mexico
{A01653261, lmontesinos, dc.balderassilva}@tec.mx
Keywords:
Virtual Reality, Depth Maps, Stereoscopic Vision, Human-Computer Interaction.
Abstract:
The ability to discern the pose and gesture of the human hand is of big importance in the field of human-
computer interaction, particularly in the context of sign language interpretation, gesture-based control and
augmented reality applications. Some models employ different methodologies to estimate the position of the
hand. However, few have provided a comprehensive and objective comparison, resulting in a limited under-
standing of the approaches among researchers. The present study assesses the efficacy of three-dimensional
(3D) hand pose estimation techniques, with a particular focus on those that derive the hand pose directly from
depth maps or stereo images. The evaluation of the models considers endpoint pixel error as a principal metric
for comparison between methods, with the aim of identifying the most effective approach. The objective is
to identify a method that is suitable for virtual reality training considering memory usage, speed, accuracy,
adaptability, and robustness. Furthermore, this study can help other researchers understand the construction of
such models and develop their own models.
1 INTRODUCTION
Hand pose detection is the process of identifying
and tracking the positions and movements of a hand
and its individual fingers (Buran Basha et al., 2020).
Computer vision algorithms and deep learning mod-
els can be used to achieve it (Buran Basha et al.,
2020). This process involves extracting features from
video frames or images of hands and using regression
algorithms to identify specific gestures or behaviors.
This technology has diverse applications, particularly
in human-computer interaction for extended reality
devices, where precise hand tracking is essential, as
well as gesture recognition and accurate hand track-
ing (Zhang et al., 2023; Haji Mohd et al., 2023). The
application in education has been found to check how
students move their hands during laboratory proce-
dures (Liu et al., 2023). Moreover, within the health-
care sector, hand pose detection models contribute
to the automatic identification of abnormal hand ges-
tures, facilitating the early diagnosis and treatment of
nerve injuries (Gu et al., 2022).
a
https://orcid.org/0009-0008-4042-8251
b
https://orcid.org/0000-0003-3976-4190
c
https://orcid.org/0000-0001-7630-8608
The detection of hand pose faces various chal-
lenges. Specifically, reliable detection among
clutter and occlusions remains problematic
(Alinezhad Noghre et al., 2023), compounded
by variations in poses and background clutter
(Haji Mohd et al., 2023). The current two-
dimensional models for the detection of hand pose
have been greatly developed in terms of the precision
of the position and pose of each finger (Liu et al.,
2023), gesture classification (Guan et al., 2023), and
improvement in physical procedures involving hands
(Zhang et al., 2023), among others. However, they
lack applicability in 3D contexts, despite the potential
for testing from its 2D approaches. Additionally,
even if there are existing open source solutions (see
section 3), each approach possesses unique qualities
that may be absent in others, resulting in incomplete
solutions as a whole. In addition, variability in the
construction of the hand skeleton among different
models adds a layer of complexity, as there is no
standard format that defines the structure uniformly.
The objective of this study is to identify an appro-
priate three-dimensional hand estimation technique
for virtual environments by comparing two stereo-
scopic models. One obtains depth maps, and the other
generates stereo images. This was done to compare
308
Iglesias, J., Montesinos, L. and Balderas, D.
A Comparative Analysis of Methods for Hand Pose Detection in 3D Environments.
DOI: 10.5220/0013044300003822
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 308-313
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

the two methods, with the aim of determining which
is the most effective for locating the hand, determin-
ing its position, and analysing its pose. The study con-
siders metrics such as the error distance being End-
point Pixel Error (EPE) which compares the error dis-
tance between the predicted and real landmark coor-
dinates. EPE metric is used because this is a stan-
dard keypoint detection metric, which has been used
mainly in the evaluation of hand estimation (Chatzis
et al., 2020; Sharma and Huang, 2021). This paper
aims to serve as a guide for other researchers in se-
lecting the best-suited methods for solving problems
related to hand pose detection.
Sections 2 and 3 provide background and re-
lated work on hand pose detection, comprehensively
analysing the existing models, databases, and metrics
used. Section 4 describes the methods, Section 5 its
results and discussion, and Section 6 the limitations
encountered. Finally, sections 7 and 8 present future
work and conclusions, respectively.
2 BACKGROUND
This section provides a context for understanding the
research. The first subsection 2.1 focusses on the con-
struction of hand poses and then section 2.2 shows the
theory behind the metrics used to evaluate the models.
2.1 Hand Landmarks Construction
There are several ways of constructing virtual skele-
ton hands to identify their anatomical landmarks;
which makes it difficult to make hand pose models
since the joint landmarks vary. Many models are con-
structed using the skeletal joints of the hand, start-
ing at the wrist or palm and then going through all
the joints of the fingers. Each finger has 3 joints: the
distal interphalangeal joint (DIP), the proximal inter-
phalangeal joint (PIP) and the metacarpophalangeal
joint (MCP joint). The thumb has different joint
names: the interphalangeal joint (IP), the metacar-
pophalangeal joint (MCP), and the carpometacarpal
joint (CMC) (American Society for Surgery of the
Hand, 2024). From there, the hand can be easily con-
structed for computer algorithms, also by adding the
tip for each finger to visualise it completely (called
TIP, of course). An example of this is how the Me-
dia Pipe model is constructed, as shown in Figure 1.
There are 21 knuckle coordinates in the captured hand
regions (google, 2024).
Figure 1: The 21 hand-knuckle coordinates (google, 2024).
2.2 Metrics
When evaluating 3D hand pose estimation meth-
ods, common metrics include the Endpoint Pixel Er-
ror (EPE) and the Percentage of Correct Keypoints
(PCK). The EPE, as shown in Equation 1, is the av-
erage Euclidean distance between the predicted and
reference joints, while the PCK measures the mean
percentage of predicted joint locations that fall within
certain error thresholds compared to correct poses.
In short, the mean Euclidean distance between land-
marks and predictions is used to calculate the EPE,
while the PCK considers a prediction correct if the
EPE between a pair of landmarks and its prediction is
within a given threshold. To properly assess the per-
formance of the model and compare different models,
it is important to plot the PCK over different thresh-
olds and calculate the Area Under the Curve (AUC)
(Chatzis et al., 2020; Sharma and Huang, 2021).
EPE =
v
u
u
t
k
∑
n=0
(g
n
− p
n
)
2
(1)
3 RELATED WORK
The review of related work discusses previous re-
search in hand pose models, highlighting trends and
common approaches. Section 3.1 explores various
methods, particularly Convolutional Neural Networks
(CNNs), for detecting hand poses in three dimensions
(3D). CNNs have proven to be effective in learning
the features of images to accurately estimate hand
positions. Additionally, Section 3.2 examines alter-
native models such as Generative Adversarial Net-
works (GANs) and PointNet, offering novel perspec-
tives for 3D hand pose detection. While CNNs focus
on visual feature learning, GANs can generate realis-
tic 3D hand images, and PointNet excels at processing
point clouds, crucial for scenarios requiring 3D infor-
mation. Furthermore, the review discusses the spe-
cialised 3D hand pose databases in Section 3.3, which
have improved model training and evaluation, leading
to improved accuracy and generalisation in 3D hand
pose detection systems.
A Comparative Analysis of Methods for Hand Pose Detection in 3D Environments
309

3.1 Convolutional Neural Networks
The work of Malik and collaborators introduces
WHSP-Net, a novel weakly supervised learning
method to extract three-dimensional hand shape and
pose from single depth images (Malik et al., 2019).
Their approach integrates a CNN for joint position
generation (in other words, the hand skeleton is cre-
ated and positioned in accordance with the desired
specifications), a shape decoder for dense mesh re-
construction, and a depth synthesiser for image re-
construction, learning from both real and synthetic
data to compensate for the lack of ground truth.
The score obtained achieves a mean 3D joint po-
sition error of 9.24 mm. In contrast, Sharma et
al. (Sharma and Huang, 2021) propose an end-to-
end framework for unconstrained 3D hand pose es-
timation from monocular RGB images. Their Con-
vNet model predicts hand information and infers pose
solely from keypoint annotations, incorporating bio-
logical constraints to enhance accuracy. In particu-
lar, on the STB dataset, the model achieves a Mean
Endpoint Pixel Error of 8.71 mm. Despite focussing
solely on the area of the hand, both approaches en-
hance accuracy and address distinct challenges in 3D
hand pose estimation, highlighting the diverse strate-
gies employed in computer vision. However, they do
not explicitly consider the spatial positioning of the
hand relative to the camera surroundings, a notable
limitation for virtual reality applications.
3.2 Other Models
He et al.’s study, proposing a technique to generate
depth hand images based on ground-truth 3D hand
poses using generative adversarial networks (GAN)
and image-style transfer techniques, achieves mean
joint errors of 8.41 mm and 6.45 mm on the MSRA
and ICVL datasets, respectively (He et al., 2019) .
However, Wu et al’s Capsule-HandNet, an end-to-
end capsule-based network for estimating hand poses
from 3D data, demonstrates slightly higher mean joint
errors of 8.85 and 7.49 mm on the same datasets (Wu
et al., 2020). Despite these nuanced differences, both
approaches exhibit significant potential for enhancing
hand pose estimation methodologies, each highlight-
ing distinct strengths in modelling and inference tech-
niques.
3.3 3D Hand Pose Databases
The study by Gomez-Donoso et al.(Gomez-Donoso
et al., 2019) proposes the creation of a new multiview
dataset for hand pose due to the shortcomings present
in existing datasets. These datasets are characterised
by limited samples, inaccurate data or higher-level
annotations, and a focus mainly on depth-based ap-
proaches, which lacked RGB data. The set comprises
colour images of the hand and annotations for each
sample, including the bounding box and the 2D and
3D location of the joints. In addition, a deep learn-
ing architecture was introduced for real-time estima-
tion of the 2D pose of the hand. Experiments demon-
strated the dataset’s effectiveness in producing accu-
rate results for 2D hand pose estimation using a sin-
gle colour camera. The study made a significant con-
tribution by providing a large-scale dataset of more
than 26,500 annotations. This dataset includes colour
frames from four different viewpoints, detailed anno-
tations of 3D and 2D joint positions, and bounding
boxes.
The study by (Chatzis et al., 2020) provides a re-
view of various databases used in hand posture re-
search and hand posture tracking. The datasets men-
tioned include ICVL, NYU Hand Pose Dataset, Big-
Hand2.2M, MSRA15, Handnet, HANDS 2017, Syn-
Hand5M, FreiHand, RHD, STB, EgoDexter, Dex-
ter+Object, Dexter1, and SynthHands. Each dataset
varies in size, resolution, number of subjects, and spe-
cific characteristics of the annotations provided. Fur-
thermore, the text highlights the strengths and weak-
nesses of each dataset, including image quality, an-
notation accuracy, and specific challenges for hand
tracking research.
4 MATERIALS AND METHODS
Two approaches are proposed as common techniques
to detect depth in three-dimensional environments by
using two cameras:
1. Depth map approach: In this method, the model
directly analyses the depth map to detect the hand
and estimate its 3D pose landmarks.
2. Stereo image approach: In this approach, the
model analyses the 2D image to detect the hand
and estimate its 2D pose landmarks in the two
stereo images. Subsequently, the 2D landmark
coordinates are merged into 3D coordinates using
the depth information provided by both cameras.
The dataset created by Zhang et al. (Zhang et al.,
2016) is used. This data set is selected for its compro-
mise between size and robustness, as well as its inclu-
sion of stereo images and depth maps. To process the
data, both stereo images and depth maps are resized,
transformed to greyscale, and normalised. The land-
mark coordinates present in the two matrix files (one
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
310
for the stereo images and another for the depth maps)
are transformed into a data frame and reorganised ac-
cording to their intended purpose, with each three
columns representing a point. Each row represents
the landmarks of the detected hand in a stereo picture
or a depth map. See Figure 3 as a simplified visual
representation of the methodology of this paper. All
other specifications such as the cameras’ properties,
distances, units are written in Zhang’s project.
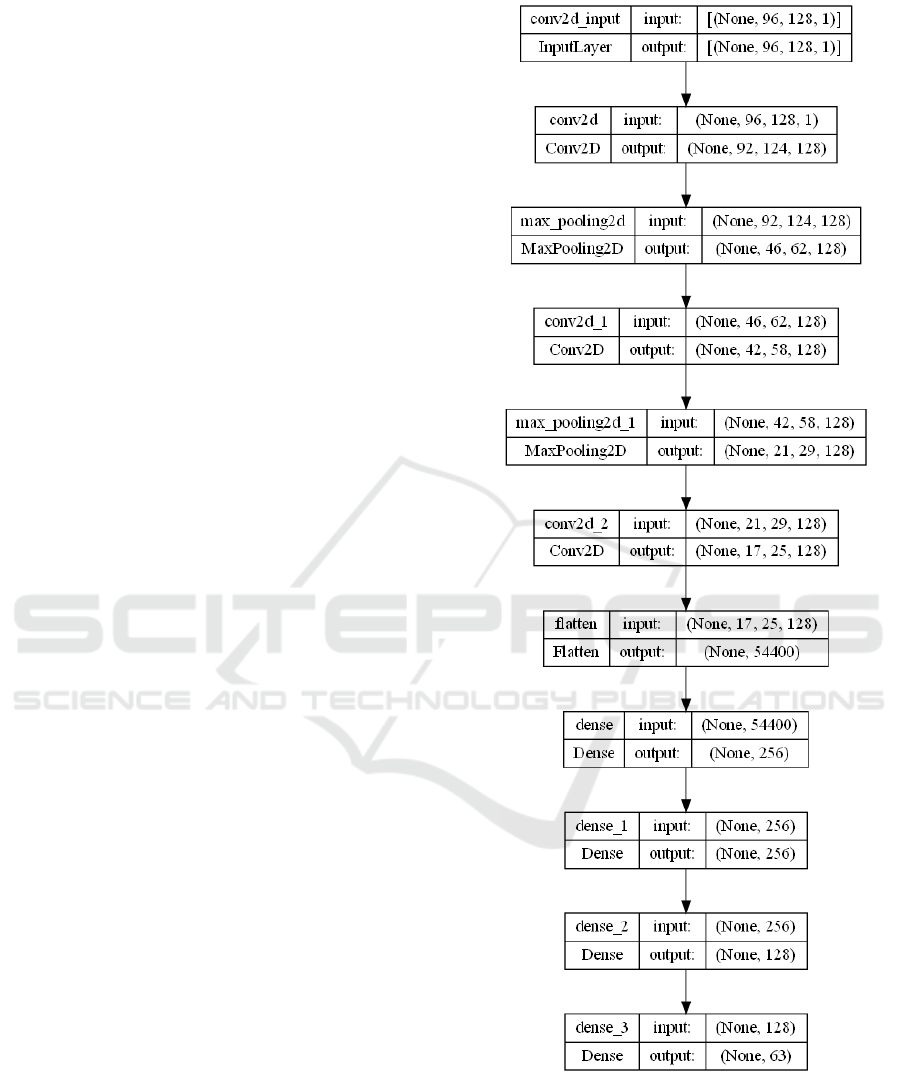
Both methods are evaluated using the Endpoint
Pixel Error (EPE) metric to provide a standardised
measure for performance evaluation. Convolutional
Neural Networks (CNNs) are selected as the main ar-
chitecture for both methodologies because of their ef-
fectiveness in handling image processing tasks. For
the depth image approach, the architecture shown in
Figure 2 is used. In addition, the Mediapipe solution
for the estimation of bidimensional hand pose is used
as the basis for the second approach (google, 2024).
5 RESULTS AND DISCUSSION
The two approaches were successfully implemented,
yielding intriguing results. In both methods, the pre-
dicted hand is correctly located according to the test
data, with some minor details from the predicted fin-
ger position almost aligned with the test data, as ex-
pected. In Figures 4 and 5, the plot represents the po-
sition of the three-dimensional space of the hand, with
the X, Y, and Z axes serving as a reference in millime-
tres (mm); the view is adjusted to focus solely on the
position of the hand. As illustrated in Figures 4 and 5,
the predicted data exhibit a high degree of alignment
with the test data, with only minor discrepancies. The
EPE scores indicate that the stereo image approach
demonstrated a slight advantage over the depth map
approach, with scores of 22.89 and 29.72 mm, respec-
tively. The mean processing times for each had min-
imal differences, yet the stereo image approach ex-
hibited a marginal advantage over the depth map ap-
proach, with respective scores of 2.3507 and 2.7012
ms.
Meanwhile, the depth map approach was trained
for this study using the previous architecture depicted
in Figure 2, the stereo image approach was built using
the Mediapipe solution, indicating that the stereo im-
age model is better trained than the depth map model.
Nevertheless, during certain predictions, the Medi-
apipe solution encountered difficulties in detecting the
hand because the environment being too dark. Con-
sequently, it yielded deformed hands to no hands de-
tected in some instances. The hand deformation can
also happen when the cameras are not well synchro-
Figure 2: Architecture used for model CNN in the depth
map approach.
nised when the image capture is made, noise in the
model and ambient, actual model precision on the
hand detection, among others. However, both tech-
niques simply processes these inputs and, as a con-
sequence, produces outputs that reflect these limita-
A Comparative Analysis of Methods for Hand Pose Detection in 3D Environments
311
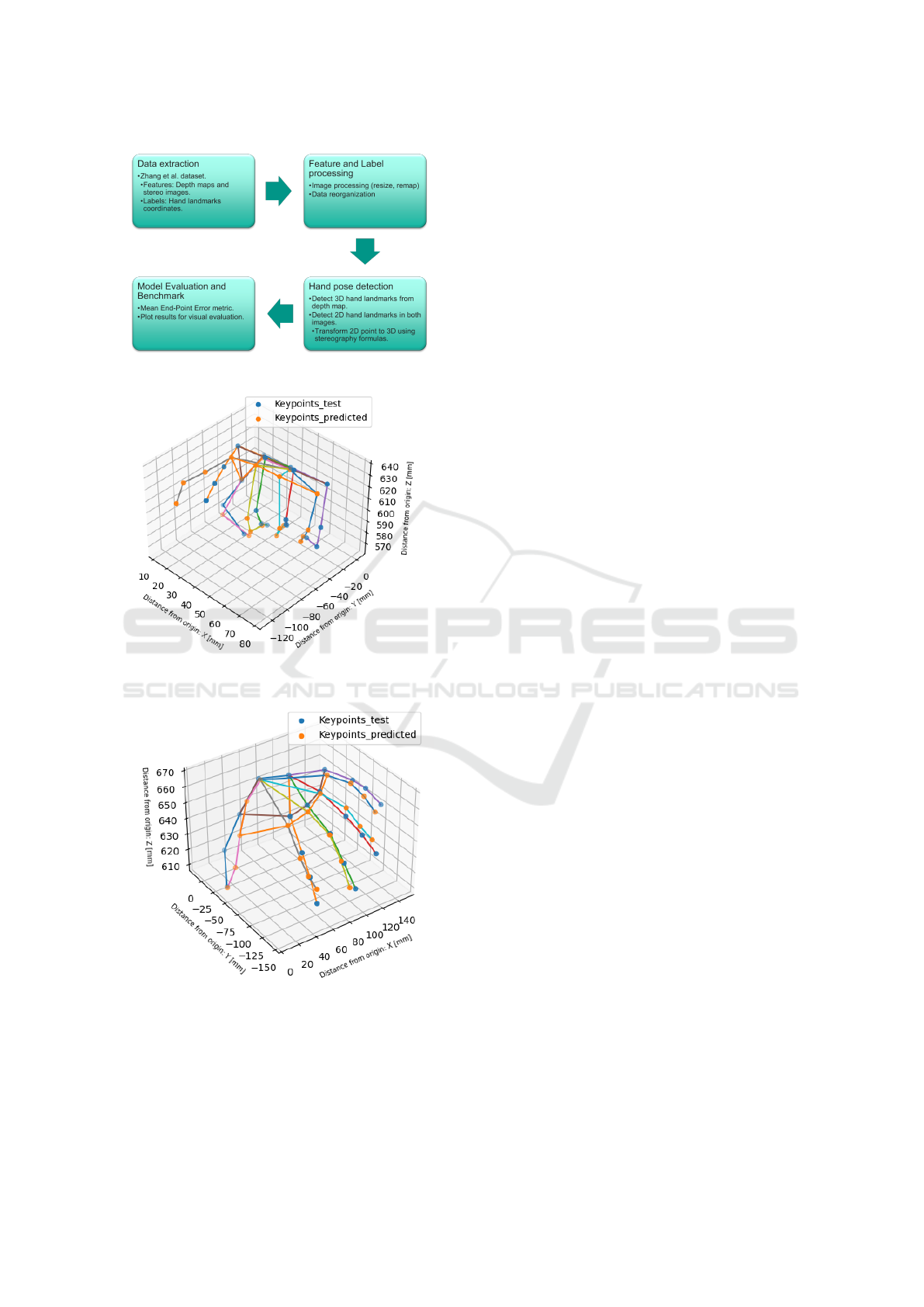
Figure 3: Methodology process.
Figure 4: Predicted and test data comparison for the depth
map approach.
Figure 5: Predicted and test data comparison for the stereo
image approach.
tions.
It is evident that even if both models were un-
able to achieve a higher precision compared to the
results obtained in the models mentioned in Section
3, the hand itself would still maintain its structural
integrity and the position of the hand would remain
accurate. It is also noteworthy that the approach util-
ising stereo images requires the model to be called
twice, whereas the depth-map approach necessitates
the processing of stereo images in order to generate
the depth map, which consequently results in a slower
processing time. Additionally, such processing may
not yield optimal results, as environmental and cam-
era variables may present challenges in processing the
data, thereby increasing the time required for both cal-
ibration and accuracy. In contrast, the stereo images
approach requires only the utilisation of the images
themselves, with the detected coordinates undergoing
a stereoscopic formula to calculate the position of the
point in the three-dimensional plane. The stereo im-
age model can be used as a rapid estimator for hand
landmark annotation, including the incorporation of
corrections to ensure that the resulting estimates are
of an acceptable standard.
6 LIMITATIONS
The lack of processing power of the computer systems
available at the time impeded the efficient execution
of complex algorithms required for this task. Further-
more, the limited time available for training detection
models constituted an additional challenge, as the ac-
curacy of these models was highly dependent on the
quantity and quality of the training data. The reduced
resolution of the input images resulted in a lower level
of hand analysis, which in turn affected the accuracy
of the detection.
7 FUTURE WORK
Continued progress in hand pose detection for virtual
environments necessitates a multifaceted approach
that addresses several key challenges. In this context,
research is proposed that focusses on three main ar-
eas with the objective of improving the effectiveness
of existing systems. Firstly, the architecture of con-
volutional neural networks can be optimised through
the introduction of innovative techniques, such as the
addition of new and useful layers or the exploration
of deeper structures. This will improve accuracy and
computational efficiency. Secondly, a model of pose
and hand gesture correction is proposed in order to
enhance the precision of the representation of finger
structure. It is proposed that the angles and pro-
portions of the virtual skeleton of the hand need to
be fixed via algorithmic or with artificial intelligence
methods, as these are the primary issues encountered
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
312

in this study. Fixing these parameters can enhance the
accuracy of the model. Third, in addition to the ongo-
ing development and refinement of a hand detection
model, consideration should be given to the integra-
tion of this model into virtual training, as previously
outlined in the main objective of this study. In other
words, the effectiveness of the model must be eval-
uated to determine whether the trainees are able to
adapt to it. One potential methodology for evaluat-
ing the efficacy of the aforementioned approach is to
devise a series of scenarios in which the trainee is re-
quired to position themselves and perform gestures in
a manner that allows for the assessment of their adap-
tation to the hand pose detection model.
8 CONCLUSIONS
A comparative analysis of two distinct methodologies
for hand pose estimation, one based on depth maps
and the other on stereo images, has yielded signifi-
cant insights into the relative strengths and limitations
of each approach. Although neither approach yielded
a near-optimal solution, both demonstrated effective-
ness in accurately capturing the spatial position of the
hand and constructing viable hand representations.
These results suggest the potential for substantial im-
provements in accuracy, robustness, and adaptability
through further refinement and optimisation of exist-
ing techniques. Consequently, continued research and
development in this area could lead to more advanced
solutions for applications such as virtual reality train-
ing and gesture-based control systems.
ACKNOWLEDGEMENTS
The authors thank Tecnologico de Monterrey for fi-
nancial support to produce this work.
REFERENCES
Alinezhad Noghre, G., Danesh Pazho, A., Katariya, V.,
and Tabkhi, H. (2023). Understanding the Challenges
and Opportunities of Pose-based Anomaly Detection.
In Proceedings of the 8th international Workshop on
Sensor-Based Activity Recognition and Artificial In-
telligence, pages 1–9, L
¨
ubeck Germany. ACM.
American Society for Surgery of the Hand (2024). Joints.
Publication Title: Body Anatomy: Upper Extremity
Joints | The Hand Society.
Buran Basha, M., Ravi Teja, S., Pavan Kumar, K., and
Anudeep, M. (2020). Hand poses detection using co-
volutional neural network. International Journal of
Scientific & Technology Research, 9(1):1887–1891.
Chatzis, T., Stergioulas, A., Konstantinidis, D., Dim-
itropoulos, K., and Daras, P. (2020). A Comprehen-
sive Study on Deep Learning-Based 3D Hand Pose
Estimation Methods. Applied Sciences, 10(19):6850.
Gomez-Donoso, F., Orts-Escolano, S., and Cazorla, M.
(2019). Large-scale multiview 3D hand pose dataset.
Image and Vision Computing, 81:25–33.
google (2024). GitHub - google/mediapipe: Cross-
platform, customizable ML solutions for live and
streaming media. Publication Title: GitHub.
Gu, F., Fan, J., Cai, C., Wang, Z., Liu, X., Yang, J., and Zhu,
Q. (2022). Automatic detection of abnormal hand ges-
tures in patients with radial, ulnar, or median nerve
injury using hand pose estimation. Frontiers in Neu-
rology, 13:1052505.
Guan, X., Shen, H., Nyatega, C. O., and Li, Q. (2023).
Repeated Cross-Scale Structure-Induced Feature Fu-
sion Network for 2D Hand Pose Estimation. Entropy,
25(5):724.
Haji Mohd, M. N., Mohd Asaari, M. S., Lay Ping, O., and
Rosdi, B. A. (2023). Vision-Based Hand Detection
and Tracking Using Fusion of Kernelized Correlation
Filter and Single-Shot Detection. Applied Sciences,
13(13):7433.
He, W., Xie, Z., Li, Y., Wang, X., and Cai, W. (2019).
Synthesizing Depth Hand Images with GANs and
Style Transfer for Hand Pose Estimation. Sensors,
19(13):2919.
Liu, S., Yuan, X., Feng, W., Ren, A., Hu, Z., Ming, Z., Za-
hid, A., Abbasi, Q., and Wang, S. (2023). A Novel
Heteromorphic Ensemble Algorithm for Hand Pose
Recognition. Symmetry, 15(3):769.
Malik, J., Elhayek, A., and Stricker, D. (2019). WHSP-Net:
A Weakly-Supervised Approach for 3D Hand Shape
and Pose Recovery from a Single Depth Image. Sen-
sors, 19(17):3784.
Sharma, S. and Huang, S. (2021). An end-to-end frame-
work for unconstrained monocular 3D hand pose esti-
mation. Pattern Recognition, 115:107892.
Wu, Y., Ma, S., Zhang, D., and Sun, J. (2020). 3D Capsule
Hand Pose Estimation Network Based on Structural
Relationship Information. Symmetry, 12(10):1636.
Zhang, J., Jiao, J., Chen, M., Qu, L., Xu, X., and Yang, Q.
(2016). 3D Hand Pose Tracking and Estimation Using
Stereo Matching.
eprint: 1610.07214.
Zhang, Q., Lin, Y., Lin, Y., and Rusinkiewicz, S. (2023).
Hand Pose Estimation with Mems-Ultrasonic Sensors.
In SIGGRAPH Asia 2023 Conference Papers, pages
1–11, Sydney NSW Australia. ACM.
A Comparative Analysis of Methods for Hand Pose Detection in 3D Environments
313
