
Effects of Cognitive Load Variation on Anthropomorphism During a
Cooperative Human-Robot Pick-and-Place Task
Mohamed Cherif Rais
1
, Barbara Kühnlenz
2 a
and Kolja Kühnlenz
1 b
1
Robotics Research Lab, Department of Electrical Engineering and Computer Science, Coburg University of Applied
Sciences and Arts, D-96450 Coburg, Germany
2
Business Psychology and Human-Machine Interaction, Department of Economics, Ansbach University of Applied
Sciences, D-91522 Ansbach, Germany
Keywords: Human-Robot Interaction, Anthropomorphism, Cognitive Load.
Abstract: This paper investigates anthropomorphism of a robot arm during a cooperative human-robot pick-and-place
task, while varying cognitive load of test persons. Test persons are required to repeatedly provide a Lego brick
for the robot by alternatingly putting it onto one of two trays. The robot then picks it up and puts it in front of
the test person again. Cognitive load is varied by whether or not an initially given 8-digit number has to be
remembered by the test person. Dimensions of anthropomorphism are acquired using the HRIES
questionnaire and cognitive load is acquired using two state-of-the-art questionnaires. Results show a
significant correlation of perceived sociability and animacy on mental demand and cognitive load, but only
in the high load condition. It is suggested, that cognitive load should be considered during cooperative task
design because resulting variations of anthropomorphism may impact cooperative task performance.
1 INTRODUCTION
Human-like form and function can increasingly be
noted in many robotic products. Especially, in the
field of industrial robots, this is an interesting trend
(e.g. Sawyer (ReThink Robotics), YUMI (ABB),
etc.). Intuitiveness of how to interact with the robot is
one reason (Mayer et al., 2012), e.g. in terms of
predictability and legibility of actions (Brecher et al.,
2013; Kirsch et al., 2010). It is further assumed, that
still human workers will be required in many
production environments, e.g. for particular tasks in
the area of assembly (Faber et al., 2015), where
flexibility, cognitive abilities and sensorimotor skills
of the collaborating human is complemented by
endurance and power of the robot (Shen and Reinhart,
2013). Further, the ongoing trend towards small batch
sizes is difficult to be accounted for by many SMEs
in terms of complete automation of production lines,
which may be uneconomical (Bley et al., 2004). In
this context, Challenges and potential contribution of
collaboration of human and robot in manufacturing
a
https://orcid.org/0000-0002-9214-1032
b
https://orcid.org/0000-0003-1511-9381
are recognized especially for high-wage countries
(Petruck et al., 2016).
The effect of anthropomorphism, i.e. attributing
human-like qualities to an object, is therefore
important to be accounted for in human-robot
interactive collaboration as it is known to impact
collaborative task-performance as well as user
experience. However, it is also known, that cognitive
load has a significant effect on anthropomorphism
(Spatola and Chaminade, 2022), whereas higher
cognitive load leads to increased levels of
anthropomorphism as two main processes co-exist in
the human brain concerning social and physical
cognition with the social pathway being the default of
cognitive process-sing, e.g. (Mars et al., 2012). Social
cognition is further related to attributing socially
relevant parameters, e.g. anthropomorphism. This
default pathway, however, may be inhibited by
processes, which are concerned with physical tasks
(Darlow and Sloman, 2010; Evans and Stanovich,
2013). So far, however, this effect is not yet
investigated within physical human-robot interaction
contexts as in related work, only robot videos are
314
Rais, M., Kühnlenz, B. and Kühnlenz, K.
Effects of Cognitive Load Variation on Anthropomorphism During a Cooperative Human-Robot Pick-and-Place Task.
DOI: 10.5220/0013057700003822
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 314-318
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

displayed without any physical task to be
accomplished by the participants (Spatola and
Chaminade, 2022).
Furthermore, also adverse effects are present,
which result from human-like design of robots. In this
context, it is known from human-human interaction,
that hand movements may deviate from task
movements in the direction of the hand movements of
a counterpart, which is also found to be present in
human-robot interaction (Kilner et al., 2003;
Chaminade et al., 2005; Kühnlenz and Kühnlenz,
2020; Kupferberg et al., 2011) and which is assumed
to be caused by activation of the mirror neuron system
and the implication of a tendency to imitate a human
counterpart to some extent. Also here, the effect of
anthropomorphism of robots may be highly relevant.
This paper investigates, in how far cognitive load
affects anthropomorphism during a real cooperative
human and robot pick-and-place task. An object
placement scenario is chosen, where robot and human
are positioned in front of and facing each other and
test persons have to repeatedly place an object
alternatingly on a left and right tray to be picked up
by the robot, which puts it back to an initial tray.
The remainder of the paper is organized as follows:
In Section 2, the hypothesis and study design are
presented; results are shown in Section 3 and discussed
in Section 4; conclusions are given in Section 5.
2 HYPOTHESES
As outlined, a significant dependency of
anthropomorphism dimensions on cognitive load is
expected as well as a positive association of both
during a physical human-robot cooperation task. So,
the main hypotheses are:
H1: Anthropomorphism of a robot depends on
cognitive load during physical cooperation of
human and robot.
H2: Anthropomorphism and cognitive load are
correlated positively during physical
cooperation of human and robot.
3 METHODOLOGY
In this paper, we exemplarily explore the effect of
cognitive load of a test person on anthropomorphism
of a cooperating robot. A cooperative pick-and-place
task was chosen, where the test person has to place a
Lego brick on one of two trays in an alternating way,
whereafter a Panda robot arm (Franka Emika)
repeatedly put the Lego brick back to an initial
position, where it is picked up then again by the test
person. Two randomized conditions (counterbalanced,
low load vs. high load) are realized as independent
factor variable in a within-subjects design, which differ
in whether an additional mental task has to be
performed constituting a certain additional cognitive
load for the test person.
Induction methodologies for cognitive load are
manifold, whereas three main techniques are
commonly used: number memorization, visual
pattern and auditory recall tasks, and time pressure
(Deck et al., 2021). Due to practical reasons in the
context of the chosen scenario, we decided for
number memorization, where the test person is shown
an 8-digit number, which they are told to memorize
during the task and write down afterwards.
Figure 1: Experimental set-up.
Initially, test persons are briefed towards the
experimental procedure, but not the hypotheses, and
informed consent is obtained. The persons then have
to complete a pre-questionnaire acquiring
demographic data (age, gender), previous experience
with robots, field of study, and left-/right-handedness.
Afterwards the cooperation task is performed in each
of the two cognitive load conditions in randomized
way, whereas a post-questionnaire is completed after
each condition. Finally, a de-briefing is conducted.
The post-questionnaire acquires dimensions of
perceived anthropomorphism as well as task-load
based on the validated Human-robot Interaction
Evaluation Scale HRIES (4 constructs (sociability,
tray 1
tray 2
initial position
Effects of Cognitive Load Variation on Anthropomorphism During a Cooperative Human-Robot Pick-and-Place Task
315
animacy, agency, disturbance) of 4 items each, 7-
point Likert scale) (Spatola et al., 2021), and NASA
TLX (5-point Likert-scale), respectively. In the latter,
the sub-scale ‘mental demand’ is assumed to be
correlated with cognitive task load. In addition,
another construct for cognitive load measurement is
used in order to be comparable to (Spatola and
Chaminade, 2022), which includes the two questions
“Regarding the task you performed, the task was very
complex” and “Regarding the task you performed,
you provided a very high mental effort to solve it”.
For reasons of clarity, this measure is abbreviated
‘CL’ in the following.
The procedure for one test person is shown in
Table 1.
Table 1: Procedure for one test person.
Task
Du duration
comments
briefing
introduction (context, procedure, tests)
PRE-quest.
~2 min
demographic data, previous experience
set-up
place test person
adjust
~1 min
let person adjust to setting
cond. 1
~1 min
object placement task in condition 1
POST-quest.
~2 min
NASA TLX, CL, HRIES
cond. 2
~1 min
object placement task in condition 2
POST-quest.
~2 min
NASA TLX, CL, HRIES
de-briefing
4 RESULTS
Results are obtained from 32 test persons (age
between 20 and 42 years, M = 25.3y, SD = 5.8y) and
64 trials (32x2 conditions in a within-subjects
design). All participants are right-handed.
Analyses of covariance (ANCOVA) are conducted
with the HRIES constructs of anthropomorphism
dimensions sociability, animacy, agency, and
disturbance as dependent variables and NASA TLX
and cognitive load items, respectively, constructs as
covariates. Q-Q plots of standardized residuals show
only slightly skewed data with few outliers, so it is
assumed, that ANCOVA results are sufficiently
reliable, in order to obtain conclusive results.
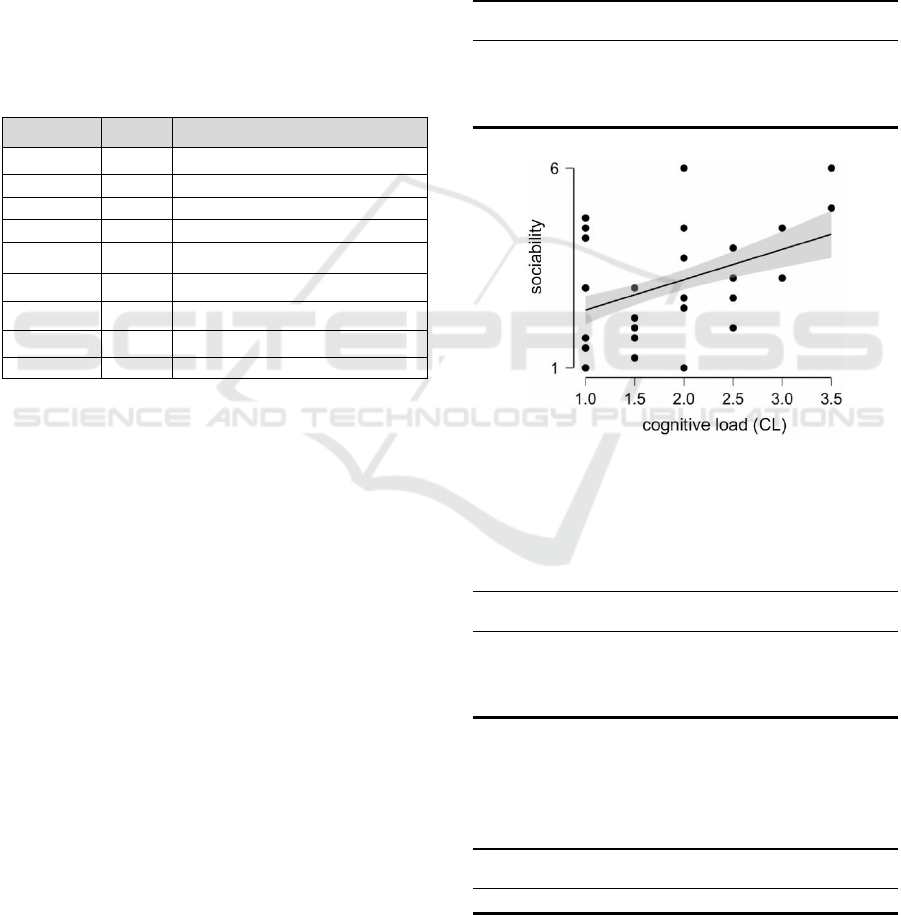
In the high cognitive load condition, ANCOVA
results of sociability with respect to NASA TLX
mental demand and cognitive load construct show a
significant dependency (see Table 2) with a positive
association of both (see Fig. 2). For the remaining
NASA TLX items, no significant effect is observed.
Similarly, ANCOVA results of animacy with
respect to cognitive load construct show a significant
dependency (see Table 3) with a positive association
of both (see Fig. 3). For the NASA TLX items,
however, no significant effect is observed.
For the remaining, HRIES constructs of
anthropomorphism (agency and disturbance) no
significant effects are obtained.
In the low cognitive load condition, no significant
effects are observed.
Table 2: ANCOVA results in high cognitive load
condition; sociability with respect to NASA TLX mental
demand and cognitive load construct (CL).
Cases
Sum of
Squares
df
Mean
Square
F
p
η²
p
CL
17.659
1.000
17.659
11.262
0.002
0.280
mental
demand
7.886
1.000
7.886
5.029
0.033
0.148
Residual
45.475
29.000
1.568
Note. Type III Sum of Squares
Figure 2: Regression of sociability and cognitive load;
standard error.
Table 3: ANCOVA results in high cognitive load
condition; animacy with respect to NASA TLX mental
demand and cognitive load construct (CL).
Cases
Sum of
Squares
df
Mean
Square
F
p
η²
p
CL
7.076
1.000
7.076
4.625
0.040
0.138
mental
demand
1.914
1.000
1.914
1.251
0.273
0.041
Residual
44.374
29.000
1.530
Note. Type III Sum of Squares
Table 4: Wilcoxon test results of cognitive load construct
(CL) in the low- (CL(L)) and high-load (CL(H))
conditions.
W
p
Rank-Biserial
Correlation
CL(L)
-
CL(H)
32.500
0.010
-0.658
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
316
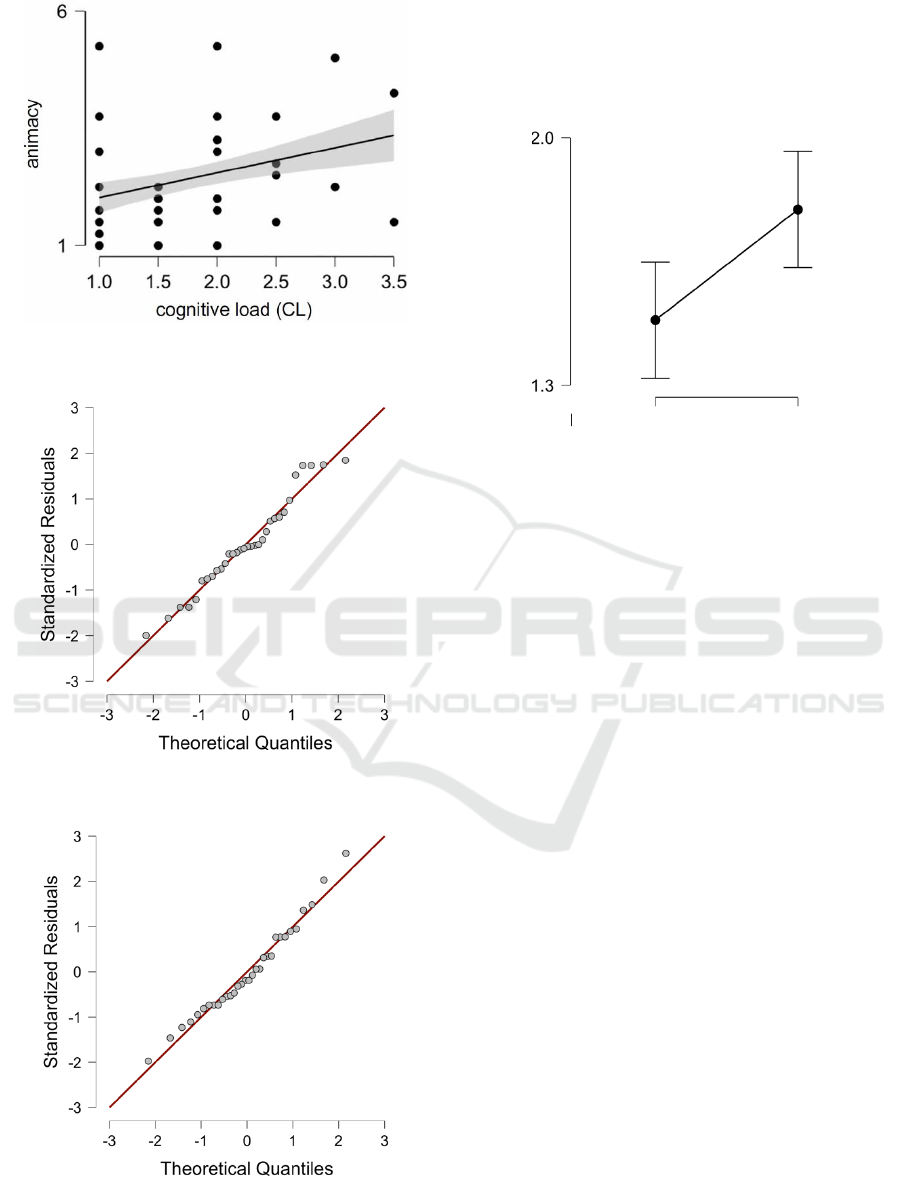
Figure 3: Regression of animacy and cognitive load;
standard error.
Figure 4: Q-Q plot; ANCOVA of sociability dependend on
cognitive load (CL).
Figure 5: Q-Q plot; ANCOVA of animacy dependend on
cognitive load (CL).
With respect to checking, whether a different
cognitive load is induced in the two conditions a
Wilcoxon signed-rank test is conducted showing a
significant difference of cognitive load with a strong
effect (see Table 4 and Figure 6).
Figure 6: Cognitive load (CL) in low- (CL(L)) and high-
load (CL(H)) conditions.
Finally, in order to check for the association of the
NASA TLX mental demand scale and cognitive load
(CL) construct scale, a correlation analysis shows a
moderate positive association (p = 0.006, r = 0.48).
5 DISCUSSION
The expected significant positive association between
dimensions of anthropomorphism and cognitive load
could be confirmed with respect to constructs of
sociability and animacy, supporting H1 and H2.
However, this effect is limited to the high cognitive
load condition. In the low cognitive load condition,
such an association is not observed. This
phenomenon could be grounded in a larger variance
in the low cognitive load condition compared to the
high cognitive load condition due to no particular
cognitive load induction is performed in the former.
It would be interesting to investigate the effects using
cognitive load induction in both conditions on
different levels of difficulty.
Effects are of small to moderate strengths (see
Tables 2 and 3), which could be related to the induced
cognitive load differences are also relatively small
(see Table 4 and Figure 6). Stronger effects might be
achieved with larger induced load differences.
Insignificant results regarding agency could be
related to the construct being less suited to evaluate a
robot arm as it refers to perceiving the robot as an
agent as a person having its own beliefs, thoughts and
cognitive load (CL)
CL(L) CL(H)
Effects of Cognitive Load Variation on Anthropomorphism During a Cooperative Human-Robot Pick-and-Place Task
317

intents (Spatola and Chaminade, 2022). Regarding
the disturbance construct, the authors themselves
argue, that the scale is more ambiguous than the
others, which could result in larger variance in the
scenario at hand.
Limitations are given by the moderate sample
size and single interaction task and robot design.
More test persons and different interaction scenarios
may contribute to increase the effects and generalize
the findings.
6 CONCLUSIONS
In the presented human-robot cooperative pick-and-
place study, induction of cognitive load contributed
to a significant positive association of the
anthropomorphism dimensions sociability and
animacy with experienced mental demand and
cognitive load of the test persons. Variable strength
of anthropomorphism due to cognitive load variation
may influence cooperative task performance, which
is generally dependent on the level of perceived
human-likeness of a robot in manifold ways and thus
may impact human-robot interaction quality in a
variety of application scenarios.
Future work will target additional aspects, which
might result from different levels of
anthropomorphism due to cognitive load variation in
the context of safety and trust.
ACKNOWLEDGEMENTS
This paper is supported in part by DAAD.
REFERENCES
Mayer, M., Odenthal, B., Ewert, D., Kempf, T., Behnen, D.,
Bücher, C., Kuz, S., Hauck, E., Kausch, B., Schilberg,
D., Herfs, W., Schlick, C., Jeschke, S. and Brecher, C.
(2012). “Self-optimising assembly systems based on
cognitive technologies,” in Integrative Production
Technology for High-Wage Countries, C. Brecher, Ed.
Springer, pp. 877–990.
Brecher, C., Müller, S., Kuz, S. and Lohse, W. (2013).
“Towards anthropomorphic movements for industrial
robots, likeability, perceived intelli- gence, and
perceived safety of robots,” Proc. 4th Int. Conf. Digit.
Hum. Modeling and Applic in Health, Saf., Erg., and
Risk Man.
Kirsch, A., Kruse, T., Sisbot, A., Alami, R., Lawitzky, M.,
Brscic ́, D., Hirche, S., Basili, P. and Glasauer, S.
(2010). “Plan-based control of joint human-robot
activities,” KI, 24(3):223–231.
Faber, M., Bützler, J. and Schlick, C. (2015). “Human-robot
cooperation in future production systems: Analysis of
requirements for designing an ergonomic work
system,” Procedia Manufacturing, vol. 3, pp. 510– 517.
Shen, Y. and Reinhart, G. (2013). “Safe assembly motion -
a novel approach for applying human-robot co-
operation in hybrid assembly systems,” in Proc. IEEE
ICMA.
Bley, H., Reinhart, G., Seliger, G., Bernardi, M. and Korne,
T. (2004). “Appropriate human involvement in
assembly and disassembly,” CIRP Annals - Man. Tech.,
Elsevier,53:487–509,2004.
Petruck, H., Kuz, S., Mertens, A. and Schlick, C. (2016).
Increasing Safety in Human-Robot Collaboration by
Using Anthropomorphic Speed Profiles of Robot
Movements.
Spatola, N. and Chaminade, T. (2022). Cognitive load
increases anthropomorphism of humanoid robot. The
automatic path of anthropomorphism, International
Journal of Human-Computer Studies, Volume 167.
Mars, R. B., Neubert, F. X., Noonan, M. A. P., Sallet, J.,
Toni, I., Rushworth, M. F. S. (2012). On the
relationship between the “default mode network” and
the “social brain.” Front. Hum. Neurosci., 6, pp. 1-9.
Darlow, A. L., Sloman, S. A. (2010). Two systems of
reasoning: architecture and relation to emotion. Wiley
Interdisciplinary Reviews: Cognitive Science, 1,
pp. 382-392.
Evans, J. S. B. T., Stanovich, K. E. (2013). Dual-process
theories of higher cognition: advancing the debate.
Perspect. Psycholog. Sci., 8 (3), pp. 223-241.
Kilner, J., Paulignan, Y. and Blakemore, S. (2003). “An
interference effect of observed biological movement on
action,” Current Biology, vol. 13, no. 6, pp. 522–525.
Chaminade, T., Franklin, D., Oztop, E. and Cheng, G.
(2005). “Motor interference between humans and
humanoid robots: Effect of biological and artificial
motion,” Proc. IEEE ICDL.
Kühnlenz, K. and Kühnlenz, B. (2020). “Motor interference
of incongruent motions increases workload in close
HRI,” Advanced Robotics, vol. 34, no. 6, p. 400–406.
Kupferberg, A., Glasauer, S., Huber, M., Rickert, M.,
Knoll, A. and Brandt, T. (2011). “Biological movement
increases acceptance of humanoid robots as human
partners in motor interaction,” AI & Society, vol. 26, no.
4, pp. 339–345.
Spatola, N., Kühnlenz, B., Cheng, G. (2021). Perception
and evaluation in human–robot interaction: The
human–robot interaction evaluation scale (HRIES)—a
multicomponent approach of anthropomorphism.
International Journal of Social Robotics, 13(7), pp.
1517-1539.
Deck, C., Jahedi, S. and Sheremeta, R. (2021). On the
consistency of cognitive load, European Economic
Review, Volume 134.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
318
