
An Approach for Fractional Commensurate Order Youla
Parametrization Using q-weighted Operator
Hanna Aboukheir
a
, Juan Romero
b
and Antonio Di Teodoro
c
Colegio de Ciencias e Ingenier
´
ıas, Universidad San Francisco de Quito, Quito, Ecuador
Keywords:
Fractional Order Control Systems, q-weighted Operator, Youla Parametrization.
Abstract:
The Youla-Kucera parametrization is a strategy widely used for robust control design and system identification
of integer systems, but with the increasing interest in fractional order controllers, a new window for research
and development is widely open. In this work this parametrization is extended to fractional commensurate
order systems using the q-weighted operator; originally developed for the field of theoretical physics, is pro-
posed as a tool for developing robust fractional order controllers, the proposal is evaluated in two simulated
processes and implemented in the TCLAB process.
1 INTRODUCTION
In industrial environments, controllers are essential
for meeting performance criteria like stabilization,
sensitivity, and robustness. Meeting all these re-
quirements simultaneously is challenging, leading to
the development of polynomial techniques for the
parametrization of controllers that stabilize a given
plant (Ku
ˇ
cera, 2007). The parametrization proposed
by (Youla et al., 1976) has been widely utilized across
various applications, including closed-loop identifi-
cation and adaptive control as found in(Anderson,
1998; Forssell and Ljung, 1999). Recently, Youla
parametrization has been used in applications such as
plug&play control and multi model adaptive control
among others, (Mahtout et al., 2020).
In the other hand, with the increasing interest in
industrial applications for fractional order controllers
as shown in (Tepljakov et al., 2021) one main chal-
lenge is the implementation of such controllers, this
is when the Youla Parametrization could serve as an
useful answer to implement such controllers in the in-
dustrial field aided by the use of the q-weighted oper-
ator (paper developed by the third author of the cur-
rent article), originally developed to obtain a set of
fractional Einstein field equations within 2+1 dimen-
sional spacetime, in the area of control systems this
operator aids in the design of stabilizing controllers
a
https://orcid.org/0000-0002-8214-511X
b
https://orcid.org/0000-0001-9558-6398
c
https://orcid.org/0000-0002-8766-0356
in fractional order independently and no limited to
first order plus time delay (FOPDT) processes as the
methods shown in (Di Teodoro et al., 2022) and (Ran-
ganayakulu et al., 2016); in other words, allows the
design of different types of controllers including frac-
tional PID controllers for systems with models differ-
ent than the FOPDT.
In this first approach in the use of the q-weighted
operator and Youla Parametrization this paper is
structured as follows: Section 2 presents a brief intro-
duction to Fractional Calculus in which fundamentals
of the q-weighted operator are presented, its relation
with the Youla Parameter and the basis for controller
design are presented in Section 3, followed by a set
of applications using the toolbox FOMCON (Tepl-
jakov and Tepljakov, 2017) in Section 4 including a
real time implementation in TCLAB from apmonitor
2 BRIEF INTRODUCTION TO
FRACTIONAL CALCULUS
Definition 2.1. The Riemann–Liouville fractional in-
tegral of order η > 0 is given by (see (Kilbas et al.,
2006; Podlubny, 1994; Kilbas et al., 1993))
I
η
a
+
h
(x) =
1
Γ(η)
Z
x
a
h(t)
(x −t)
1−η
dt, x > a. (2.1)
We denote by I
η
a
+
(L
1
) the class of functions h, repre-
sented by the fractional integral (2.1) of a summable
function, that is h = I
η
a
+
ϕ, where ϕ ∈ L
1
(a,b). A de-
scription of this class of functions was provided in
706
Aboukheir, H., Romero, J. and Di Teodoro, A.
An Approach for Fractional Commensurate Order Youla Parametrization using q-weighted Operator.
DOI: 10.5220/0013058700003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 706-713
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

(Kilbas et al., 2006; Kilbas et al., 1993; Stein and
Shakarchi, 2009).
Theorem 2.2. A function h ∈ I
η
a
+
(L
1
),η > 0, if and
only if its fractional integral I
s−η
a
+
h ∈ AC
s
([a,b]),
where s = [η] + 1 and (I
s−η
a
+
h)
(k)
(a) = 0, for k =
0,..., s − 1.
In Theorem 2.2, AC
s
([a,b]) denotes the class of func-
tions h, which are continuously differentiable on the
segment [a,b], up to order s − 1 and h
(s−1)
is abso-
lutely continuous on [a,b]. By removing the last con-
dition in Theorem 2.2, we obtain a class of functions
that admit a summable fractional derivative. (See
(Kilbas et al., 2006; Kilbas et al., 1993))
Definition 2.3 (see (Kilbas et al., 1993)). A func-
tion h ∈ L
1
(a,b) has a summable fractional deriva-
tive
D
η
a
+
h
(x) if
I
s−η
a
+
h
(x) ∈ AC
s
([a,b]), where
s = [η] + 1.
Definition 2.4. Let
D
η
a
+
h
(x) denote the fractional
Riemann–Liouville derivative of order η > 0 (see
(Kilbas et al., 2006; Podlubny, 1994; Kilbas et al.,
1993))
D
η
a
+
h
(x) =
d
dx
s
1
Γ(s − η)
Z
x
a
h(t)
(x −t)
η−s+1
dt
=
d
dx
s
I
s−η
a
+
h
(x), (2.2)
where s = [η] + 1,x > a [η] denotes the integer part
of η and Γ is the gamma function. When 0 < η < 1 ,
then (2.2) takes the form
D
η
a
+
h
(x) =
d
dx
I
1−η
a
+
h
(x). (2.3)
Note that, when η → 1, we recover the typical
derivative operator (Kilbas et al., 2006; Podlubny,
1994; Kilbas et al., 1993; Ceballos et al., 2020).
The semigroup property for the composition of frac-
tional derivatives does not hold generally (see (Pod-
lubny, 1994, Sect. 2.3.6)). In fact, the property:
D
η
a
+
D
γ
a
+
h
= D
η+γ
a
+
h, (2.4)
holds if
h
( j)
(a
+
) = 0, j = 0,1,..., s − 1, (2.5)
and h ∈ AC
s−1
([a,b]), h
(s)
∈ L
1
(a,b) and s = [γ] + 1.
Thus, we can write this result in the following:
Lemma 2.5. Consider h ∈ AC
s−1
([a,b]) and h
(s)
∈
L
1
(a,b) then,
D
η
a+
D
γ
a+
h = D
γ
a+
D
η
a+
h, (2.6)
holds whenever
h
( j)
(a
+
) = 0, j = 0,1,..., s − 1, (2.7)
where s = [γ] + 1.
Proof. This proof can be found in (Podlubny, 1994,
Secton 2.3.6).
Remark 2.6. It is worth noticing that the Riemann-
Liouville derivative of a constant is not zero. How-
ever, in the limit process, it behaves as expected.
lim
η→1
D
η
a
+
1
(x) = lim
η→1
(x − a)
−η
Γ(1 − η)
= 0. (2.8)
Example. Consider α ∈ (0, 1), a
+
> 0 and for m ∈ N
(See (Kilbas et al., 2006; Kilbas et al., 1993; Ceballos
et al., 2022)).
h
D
α
a
+
(t − a)
(m+1)α−1
i
= (t − a)
mα−1
,
h
D
α
a
+
(t − a)
α−1
i
= 0 ifα < 1 and x > 0.
There are other types of derivatives, such as the Ca-
puto derivative (where the derivative of a constant
is zero), the Caputo-Fabrizio derivative, the Hilfer
derivative, among others. However, for this proposal,
we will use a modification of the Riemann operator
that recently has applications in physics, specifically
in developing solutions for Fractional Einstein field
equations. This is our primary motivation: starting
from an operator that has applications in physics and
exploring how it can contribute to control theory.
Now we will introduce the weighted fractional op-
erator, the central piece of all our subsequent develop-
ment.
Definition 2.7. Consider q
1
(x,η) a continuous func-
tion, q
2
(x,η) a continuously differentiable function
on x and let
(q
1
,q
2
)
D
η
a
+
h
(x) =
q
D
η
a
+
h
(x) de-
note the q-weighted fractional Riemann-Liouville
derivative of order η > 0. For q
1
,q
2
∈ AC
s
(R)
q
D
η
a
+
h
(x) = q
1
(x,η)
d
dx
s
q
2
(x,η)
I
s−η
a
+
h
(x),
(2.9)
where s = [η] + 1, x > a and [η] denotes the integer
part of η.
Remark 2.8. To recover the Riemann-Liouville
operator defined in 2.2, it is sufficient to take
lim
η→1
q
1
(x,η) = lim
η→1
q
2
(x,η) = 1, and to obtain the
classical derivative, it is enough to take α → 1.
An Approach for Fractional Commensurate Order Youla Parametrization using q-weighted Operator
707
Example. Consider 0 < η < 1 and taking q
2
(x,η) =
(x − a)
η−1
so then (2.9) takes the form
q
D
η
a
+
h
(x) = q
1
(x,η)
d
dx
(x − a)
η−1
I
1−η
a
+
h
(x).
(2.10)
As a consequence of the form of q
2
, we have that for
any q
1
, the derivative of a constant is zero
q
D
η
a
+
1
(x) = 0 (2.11)
As in the case of the Riemann-Liouville operator, It is
not difficult to see that the operator is linear and the
semigroup property for the composition of fractional
derivatives is generally not satisfied. Nonetheless, we
can obtain similar relation
Based on the operator (2.9), and considering numeri-
cal implementations with much greater simplicity and
computational ease, we slightly modify the structure
of the operator, keeping the form, but now thinking of
it in terms of convolutions.
q
D
η
a
+
h
(x) =
q
1
(t,η) ∗
d
dt
q
2
(x,η) ∗
I
1−η
a
+
h
(t)+
q
1
(t,η) ∗ q
2
(t,η) ∗
D
η
a
+
h
(t) (2.12)
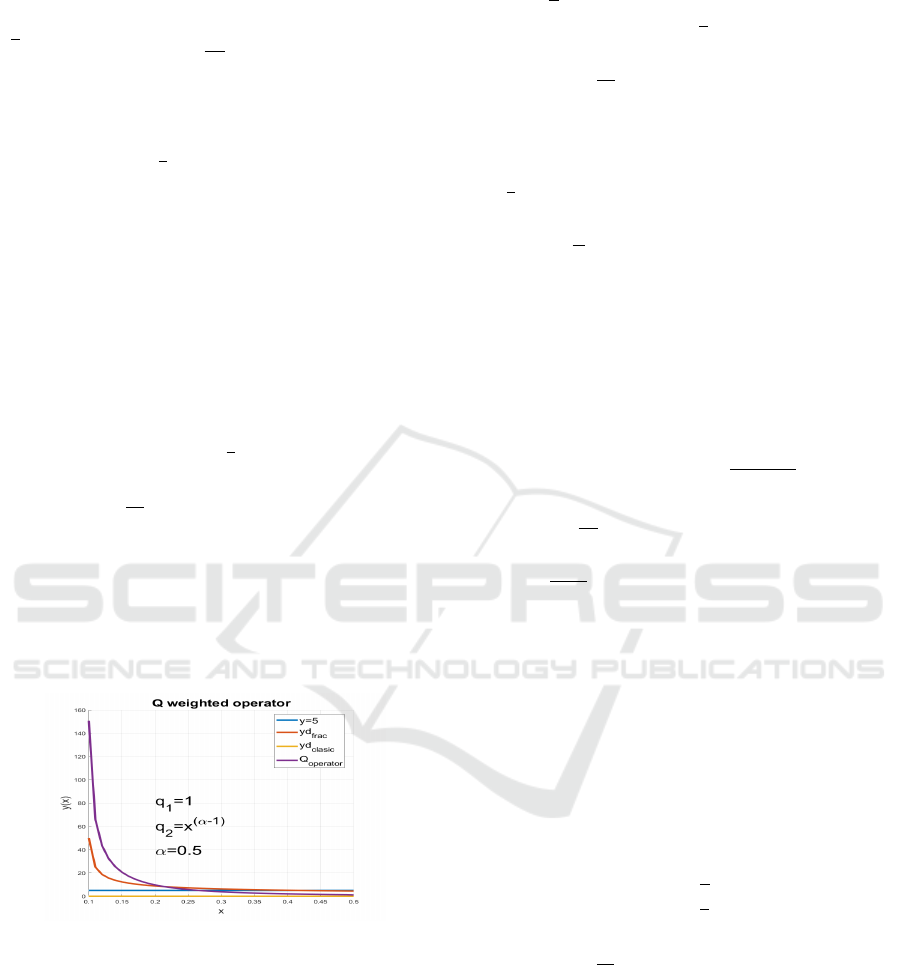
Example. Let’s consider in fig:1 the case where α =
0.5 and the weights are defined as q
1
= 1 and q
2
=
(x − a)
α
with a = 0 in the Q operator as defined in
2.10. The weight q
2
is specifically chosen to cancel
the Q operator when the function f (t) is a constant.
Figure 1: Example Q operator.
2.0.1 Laplace Transform of Fractional-Order
Derivatives
Definition 2.9. Consider F(s) := (L f )(s) to rep-
resent the Laplace transform of certain function f ,
α ∈ (n − 1,n], and n ∈ N (See (Kilbas et al., 1993)).
L D
α
0
+
f
(s) = s
α
F(s) −
n
∑
k=1
s
k−1
(D
α−k
0
+
f )(0)
It is clear that if α ∈ (0,1], then
L D
α
0
+
f
(s) = s
α
F(s) − (D
α−1
0
+
f )(0) (2.13)
By applying the Laplace transform to the following
modified q-weighted operator with 0 < η < 1.
q
D
η
a
+
h
(t) =
q
1
(t,η) ∗
d
dt
q
2
(x,η) ∗
I
1−β
a
+
h
(t)+
q
1
(t,η) ∗ q
2
(t,η) ∗
D
η
a
+
h
(t) (2.14)
we obtain:
L
q
D
η
a
+
h
(s) = q
1
(s,η)q
2
(s,η)[s
β
+ s
α
]h(s) (2.15)
2.1 The q-weighted Gr
¨
unwald-Letnikov
Derivative Version
The Gr
¨
unwald-Letnikov derivative is defined as (Pala-
cios et al., 2023):
Definition 2.10. Let η > 0, f ∈ C
k
[a,b], and a < x ≤
b. Then
G
η
a
f (x) = lim
N→∞
∆
η
h
N
f (x)
h
η
N
= lim
h→0
1
h
β
∞
∑
k=0
(−1)
k
β
k
f (x − kh), (2.16)
with h =
(x−a)
N
, N = 1,2,....
This definition involves a sum of values of the func-
tion f (x) at different points.
Remark 2.11. It is worth mentioning that the
Gr
¨
unwald-Letnikov derivative can be seen as a dis-
crete approximation of the Riemann-Liouville deriva-
tive, and in the limit, as the step size goes to zero, the
Gr
¨
unwald-Letnikov derivative becomes a continuous
fractional derivative.
Having the definition of the Gr
¨
unwald-Letnikov,
we can define our version of the weighted operator,
which will be used for the numerical implementations
in this work.
The Gr
¨
unwald-Letnikov q-weighted version
q
G
η
a
+
h
(t) =
q
1
(t,η) ∗
d
dt
q
2
(x,η) ∗
I
1−η
a
+
h
(t)+
q
1
(t,η) ∗ q
2
(t,η) ∗
G
η
a
+
h
(t) (2.17)
Example. Let’s consider the case in fig:2 where α =
0.5 and the weights are defined as q
1
= (x − a)
α
and
q
2
= 1, with a = 0. The function f [t] = x
2
is cho-
sen to illustrate how the Qweighted operator func-
tions in a specific scenario. The analytical im-
plementation defined in 2.10 is contrasted with the
Gr
¨
unwald–Letnikov approximation defined in 2.17,
revealing minor differences between the two ap-
proaches.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
708
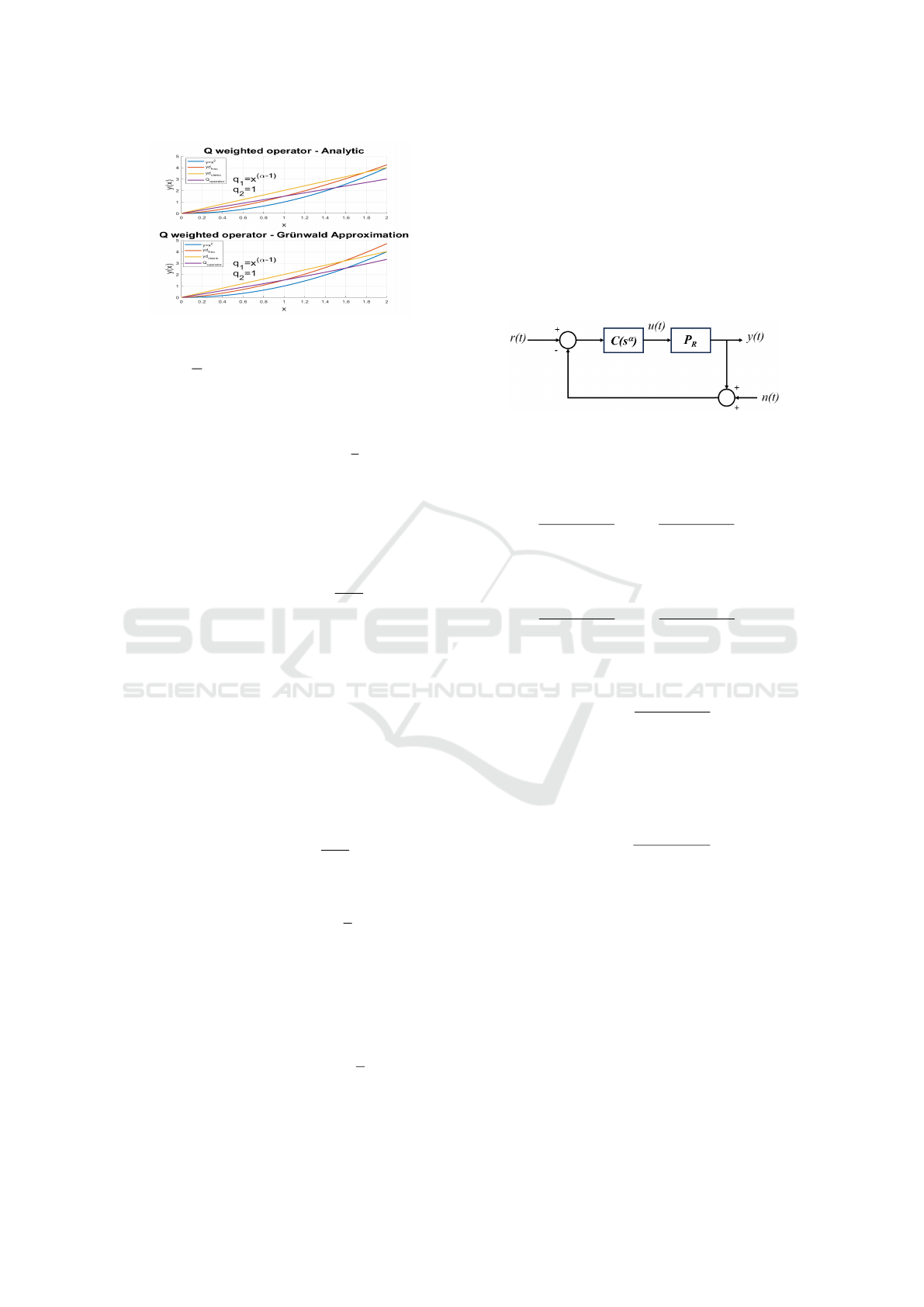
Figure 2: Example Q operator.
3 THE q-weighted OPERATOR
AND THE RELATION WITH
YOULA PARAMETRIZATION
In the previous section the generalized q-weighted op-
erator is presented, in this section, the operator is used
for fractional order control.
In order to further explain the proposed method,
it is necessary to keep in mind some necessary ba-
sic concepts that are formalized in the following para-
graphs.
Definition 3.1. A system P(s
α
) =
N(s
α
)
D(s
α
)
is said to be
proper if the degree of D(s
α
) is larger or equal than
the degree of N(s
α
)(Goodwin et al., 2001).
Definition 3.2. A system P(s
α
) is said to be com-
mensurate if the dynamics order of the fractional sys-
tem are equal; otherwise, is incommensurate (Tava-
zoei and Asemani, 2020).
Definition 3.3. A system is said to be BIBO stable
(bounded-input bounded-output) if every bounded in-
put excites a bounded output. This stability is defined
for the zero-state response and is applicable only if
the system is initially relaxed (Chen, 1999).
Theorem 3.4. (Petr
´
a
ˇ
s and Petr
´
a
ˇ
s, 2011) A fractional
commensurate system P(s
α
) =
N(s
α
)
D(s
α
)
is said to be
stable if and only if considering a fractional opera-
tor α ∈ (0,2) then
| arg[eig(P(s
α
))] |> α
π
2
(3.1)
Definition 3.5. A fractional incommensurate sys-
tem G(s
β
) is said to be BIBO stable if and only if
α ∈ (0,2) satisfy the following inequality (Petr
´
a
ˇ
s and
Petr
´
a
ˇ
s, 2011):
| arg[eig(G(s
β
))] |< π
1 −
β
2
(3.2)
Two definitions for stability are presented in defini-
tions 3.3,and 3.5 and one Theorem in 3.4 for con-
trol system purposes;with all this in mind, consider
for instance the closed loop system shown in figure
3,where r(t),y(t), u(t) and n(t) are the reference sig-
nal, the output signal, control signal and the noise sig-
nal (white noise) respectively. P
R
is the real process
which for the moment is assumed stable in open loop
and C(s
α
) is the fractional controller to be estimated.
Figure 3: Closed loop linear fractional system with noise.
Following (Mahtout et al., 2020) The set of trans-
fer functions from n(s) and r(s) to y(s) are shown as
follows:
y(s) =
C(s
α
)P
R
1 +C(s
α
)P
R
r(s) −
C(s
α
)P
R
1 +C(s
α
)P
R
n(s), (3.3)
Now, the set of transfer functions from r(s),n(s) to
u(s) are estimated as follows:
u(s) =
C(s
α
)
1 +C(s
α
)P
R
r(s) −
C(s
α
)
1 +C(s
α
)P
R
n(s). (3.4)
Following (Keviczky and B
´
any
´
asz, 2007; Mahtout
et al., 2020) and adapting to this work it is clear that:
Q(s
α
) =
C(s
α
)
1 +C(s
α
)P
R
(3.5)
Q(s
α
) in (3.5) is the Fractional Youla Parameter
(Aboukheir et al., 2006; Aboukheir, 2010; Keviczky
and B
´
any
´
asz, 2007; Mahtout et al., 2020).
Clearing for C(s
α
) in (3.5) it is possible to obtain
C(s
α
) =
Q(s
α
)
1 − Q(s
α
)P
R
(3.6)
Replacing (3.6) in (3.3) following (Bars and Ke-
viczky, 2015) the closed loop is transformed into the
Internal Model Structure shown as follows
y(s) = P
R
Q(s
α
)[r(s) − n(s)] (3.7)
The Youla Parameter Q(s
α
) must be proper and stable
(Valderrama et al., 2020), and selected with commen-
surate order according to (Petr
´
a
ˇ
s and Petr
´
a
ˇ
s, 2011) by
the designer in order to guarantee the closed loop sta-
bility.
The control system presented in 3.7, is not the ideal
approach when P
R
is open loop unstable, or has a time
delay; which is the case to be analyzed as follows, first
consider again the system presented in figure 3 with
An Approach for Fractional Commensurate Order Youla Parametrization using q-weighted Operator
709
P
R
= P
0
e
−tds
with P
0
a proper and stable open loop
model coupled with a time delay td, the closed loop
set of transfer functions from setpoint to output and
setpoint to control signal are shown as follows:
y(s) =
C(s
α
)P
0
e
−tds
1 +C(s
α
)P
0
e
−tds
[r(s) − n(s)] (3.8)
u(s) =
C(s
α
)
1 +C(s
α
)P
0
e
−tds
[r(s) − n(s)] (3.9)
It is clear from (3.9) that Q(s
α
) is:
Q(s
α
) =
C(s
α
)
1 +C(s
α
)P
0
e
−tds
(3.10)
Rearranging for C(s
α
) in (3.10) it is possible to ob-
tain:
C(s
α
) =
Q(s
α
)
1 − Q(s
α
)P
0
e
−tds
(3.11)
It is possible to replace P
0
e
−tds
in (3.11) with:
C(s
α
) =
Q(s
α
)
1 − Q(s
α
)[P
0
e
−tds
− P
0
e
−tds
+ P
0
]
(3.12)
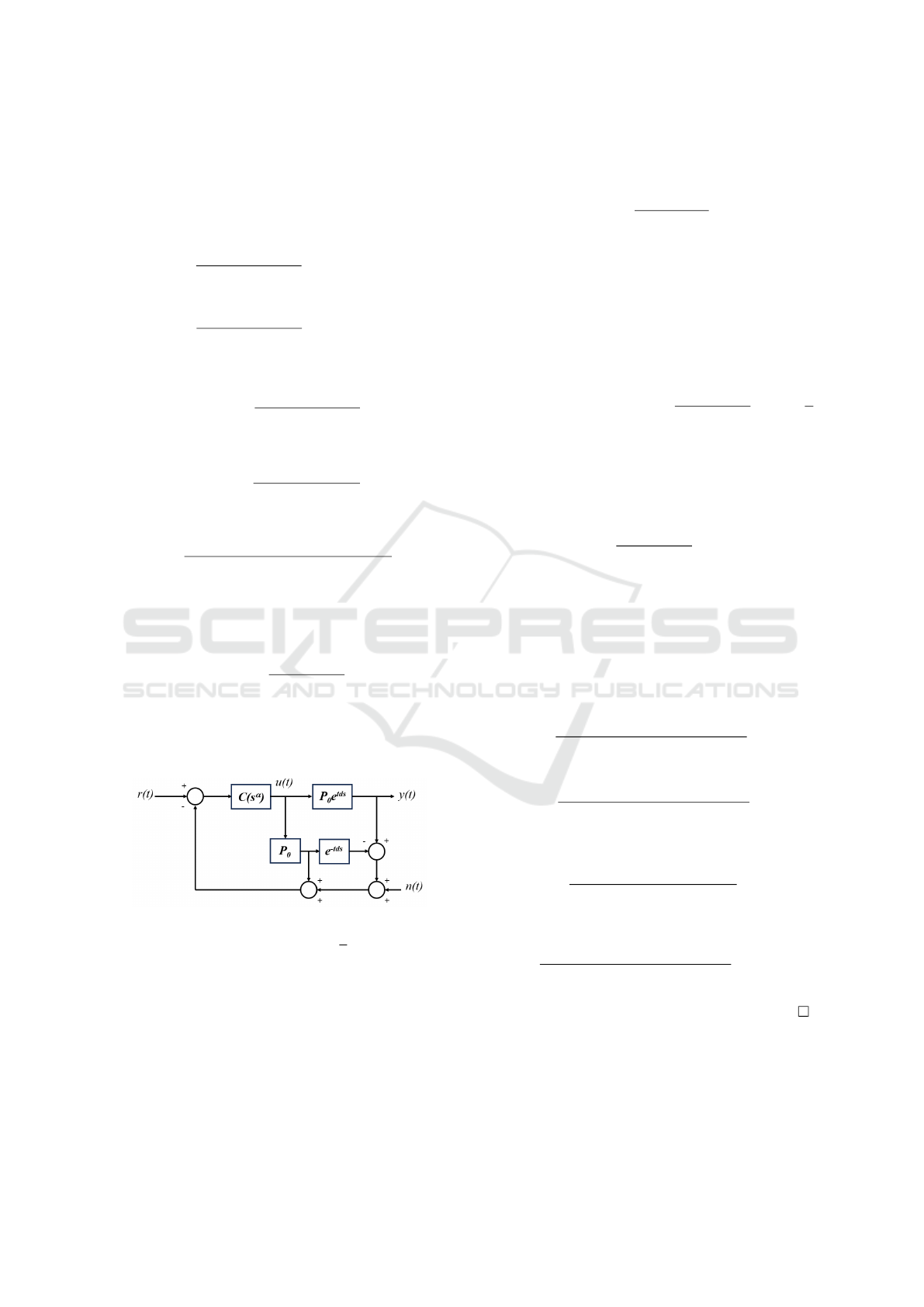
This modification is the well known Smith Predictor
(Smith and Corripio, 2005) shown in Figure 4, which
leads to the following parametrization of controller
C(s
α
):
C(s
α
) =
Q(s
α
)
1 − Q(s
α
)P
0
(3.13)
Which is similar to (3.6) with the difference that the
open loop model in (3.13) does not consider the full
dynamic of the plant as P
R
but only the stable open
loop part without delay P
0
.
Figure 4: Closed loop system with Smith Predictor.
In this paper it is proposed to use the q-weighted oper-
ator presented in (Contreras, ) as the Youla Parameter.
Using the laplace transform with zero initial condi-
tions presented in (2.15) and selecting f (s) = λe(s)
with e(s) the error signal between the output and the
reference and λ a parameter selected by the designer
it is possible to obtain:
Q(s
α
) = q
1
(s)q
2
(s)[s
α
+ s
β
]λe(s) (3.14)
This is formalized in definition 3.6.
Definition 3.6. The group of controllers C(s
α
) that
stabilize P
R
= P
0
and/or P
0
e
−tds
are parameterized by
C(s
α
) =
Q(s
α)
1 − Q(s
α)
P
0
(3.15)
with Q(s
α)
as presented in (3.14) must be proper,
commensurate order and stable.
Theorem 3.7. An open loop system represented with
the model P
R
= P
0
or P
0
e
−tds
is stabilized in closed
loop by C(s
α
) if it exist an operator with commensu-
rate order Q(s
α
) proper and stable that parameterize
C(s
α
) according to (3.6) and relocates the closed loop
poles of the system in such a way that:
| arg[eig(Q(s
α
))] |≡| arg
eig
C(s
α
)P
R
1 +C(s
α
)P
R
|> α
π
2
(3.16)
with α ∈ (0,2)
Proof. Consider an open loop system P
R
stable and
invertible and C(s
α
) the unknown controller to be es-
timated,the closed loop transfer function is:
y(s) =
P
R
C(s
α
)
1 + P
R
C(s
α
)
r(s) (3.17)
The parameter Q(s
α
) is selected with commensurate
order, proper and stable according Theorem 3.4 and
Definition 3.1 as follows:
Q(s
α
) = q
1
(s)q
2
(s)[s
α
+ s
β
]λ (3.18)
with q
1
(s) selected as (Bars and Keviczky, 2015):
λq
1
(s)[s
α
+ s
β
] = [P
R
]
−1
(3.19)
and q
2
(s) fulfilling Theorem 3.4 as:
q
2
(s) =
1
s
nα
+ a
1
s
(n−1)α
+ ... + a
n
s
α
+ 1
(3.20)
The proper and stable Q(s
α
) is represented as:
Q(s
α
) =
[P
R
]
−1
s
nα
+ a
1
s
(n−1)α
+ ... + a
n
s
α
+ 1
(3.21)
using (3.6) or (3.13) it is possible to obtain the con-
troller C(s
α
):
C(s
α
) =
[P
R
]
−1
s
nα
+ a
1
s
(n−1)α
+ ... + a
n
s
α
(3.22)
introducing the controller C(s
α
) in 3.17 it is possible
to obtain the controlled closed loop transfer function:
y(s) =
1
s
nα
+ a
1
s
(n−1)α
+ ... + a
n
s
α
+ 1
r(s) (3.23)
It is clear that the stabilized poles of the closed sys-
tems are the same as the poles of Q(s
α
)
Theorem 3.7 it is possible to extract the following
observation formalized in Lemma 3.8
Lemma 3.8. The value of α and β in (3.14) are re-
lated with the zeros of Q(s
α
) in order to fulfill theorem
3.7 it is necessary that α ≡ β.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
710

4 APPLICATIONS
4.1 First Experiment
For the first experiment is the mixing process, a hot
water stream F
1
(t) is manipulated to mix with a cold
water stream F
2
(t) to obtain an output flow F
0
(t) at
the desired temperature T
0
(t). The temperature trans-
mitter is located at a distance L from the mixing tank
bottom. This highly nonlinear system has variable dy-
namic see (Aboukheir et al., 2021) for details.
For a given operating point, it is estimated the follow-
ing first order plus dead time model (Aboukheir et al.,
2021):
P
R
(s) =
0.38
6.41s + 1
e
−25s
(4.1)
It is clear from (4.1) that a Smith Predictor is required
for the control calculations, using the scheme pre-
sented in figure 4, and taking into the account that
the system is filled up of uncertainties in gain, time
constant and time delay, it is necessary to build a con-
trollers that rejects disturbances while guaranteeing
setpoint tracking, using (3.13) the value of α = β =
0.5 and λ = 0.5 is selected with q
1
(s) and q
2
(s):
q
1
(s) = 0.5
6.41
0.5
+
1
s
0.5
2s
0.5
= 6.41s + 1 (4.2)
q
2
(s) =
1
142.85s
1.1
+ 0.38
(4.3)
The proper and stable Q(s
α
) is presented for this sys-
tem according Definitions 3.1 and Theorem 3.4 as fol-
lows:
Q(s
α
) =
6.41s + 1
142.85s
1.1
+ 0.38
(4.4)
With this in mind, the controller C(s
α
) is:
C(s
α
) =
0.007(6.41s + 1)
s
1.1
(4.5)
The fractional controller obtained in (4.5) is com-
pared with a Fractional PI, tuned using Chen tuning
rules found in (Ranganayakulu et al., 2016), obtain-
ing the following controller:
FPID(s) = 0.9916 +
0.0615
s
1.1
(4.6)
The output of the closed loop system with the FPID
is shown in figure 5, where it is possible to see that
the Fractional PID cannot handle the uncertainties of
the system, this result is similar than the Integer PID
found in (Aboukheir, 2023)
In figure 6 the controller C(s
α
) using the proposed
method is tested against the inherent uncertainties
of the system adding some large measurables distur-
bances and unmeasurable disturbances in the form of
Figure 5: Closed loop response of the system with FPID(s).
Figure 6: Closed loop response of the system with C(s
α
).
white noise. The output of the controller is shown in
figure 7
From figure 6 it is clear that the controller can han-
dle the large uncertainties and the variability in the
time delay, rejecting the measurables and unmeasur-
ables disturbances while keep the system following
the setpoints, but is in 7 when it is possible to observe
that the controller filters the noise, providing a filtered
control signal, in the following experiment, the pro-
posed fractional controller is implemented in a real
system.
4.2 Second Experiment
The second experiment,is the temperature control lab
(TCLAB) from APMONITOR, this process is con-
nected with Matlab/Simulink where the proposed
controller is installed, figure 8 shows the connection
used for this test.
Figure 7: Output of the Fractional Controller C(s
α
).
An Approach for Fractional Commensurate Order Youla Parametrization using q-weighted Operator
711

Figure 8: Temperature control lab connected with simulink.
An estimated linear model is obtained for this nonlin-
ear system, which is presented as follows:
y(s) =
0.8265
165s + 1
e
−25s
u(s) (4.7)
This system has a delay so, a controller with smith
predictor is selected as the one presented in figure 4,
following the procedure shown in the previous exam-
ples, fulfilling definitions 3.1 and Theorem 3.4 Q(s
α
)
and C(s
α
) are respectively:
Q(s
α
) =
(165s + 1)
285.71s
1.1
+ 0.8265
(4.8)
C(s
α
) = 0.0035
(165s + 1)
s
1.1
(4.9)
Figure 9: Closed loop system with C(s
α
) (red) Setpoint
(blue) Implemented closed loop system.
Figure 10: Output of the fractional controller C(s
α
).
From figures 9 and 10 it is clear that the frac-
tional controller C(s
α
) must deal with uncertainties,
measurable and unmeasurables disturbances, the ro-
bustness of the proposed controller minimize the ef-
fects of these elements while provides setpoint track-
ing throughout the whole operating region. From
these experimnents it is clear that it is possible to
parametrize controllers using Youla Parametrization
through the use of the q-weighted operator.
5 CONCLUSIONS
In this paper a methodology for Youla parametrization
of fractional commensurate order controllers is pre-
sented; first a model of the process is required, with
this model and the specified performance criteria the
Youla parameter is built Q(s
α
) using the q-weighted
operator, this parametrization allows to design a ro-
bust loop controller that deals with noise, measurable
disturbances and uncertainties while provides setpoint
tracking as shown in the previously presented exper-
iments, in future works the proposal is going to be
extended to incommensurate systems.
ACKNOWLEDGEMENTS
This work was supported by Universidad San Fran-
cisco de Quito USFQ (Ecuador), through the Cole-
gio de Ciencias e Ingenier
´
ıa and Decanato de Investi-
gaci
´
on.
REFERENCES
Aboukheir, H. (2010). Closed loop identification using tak-
agi sugeno models. IEEE Latin America Transactions,
8(3):199–204.
Aboukheir, H. (2023). Data driven sliding mode con-
trol: A model-free approach. In 2023 IEEE Seventh
Ecuador Technical Chapters Meeting (ECTM), pages
1–6. IEEE.
Aboukheir, H., Herrera, M., Iglesias, E., and Camacho, O.
(2021). Dynamic sliding mode control based on fuzzy
systems for nonlinear processes. In 2021 IEEE Fifth
Ecuador Technical Chapters Meeting (ETCM), pages
1–6. IEEE.
Aboukheir, H., Rojas, K., Villa, G., and Romero, P. (2006).
Closed loop identification with youla parameteriza-
tion and neural nets. In 2006 American Control Con-
ference, pages 6–pp. IEEE.
Anderson, B. D. (1998). From youla–kucera to identifi-
cation, adaptive and nonlinear control. Automatica,
34(12):1485–1506.
Bars, R. and Keviczky, L. (2015). Introducing new
control paradigms in basic control education youla
parametrization.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
712

Ceballos, J., Coloma, N., Di Teodoro, A., and Ochoa-
Tocachi, D. (2020). Generalized fractional cauchy–
riemann operator associated with the fractional
cauchy–riemann operator. Advances in Applied Clif-
ford Algebras, 30(5):1–22.
Ceballos, J., Coloma, N., Di Teodoro, A., Ochoa-Tocachi,
D., and Ponce, F. (2022). Fractional multicomplex
polynomials. Complex Analysis and Operator Theory,
16(4):1–30.
Chen, C.-T. (1999). Linear system theory and design. Ox-
ford University Press.
Contreras, E Di Teodoro, A. M. M. Fractional einstein field
equations in 2+1 dimensional spacetime. preprint to
be published.
Di Teodoro, A., Ochoa-Tocachi, D., Aboukheir, H., and
Camacho, O. (2022). Sliding-mode controller based
on fractional order calculus for chemical processes.
In 2022 IEEE International Conference on Automa-
tion/XXV Congress of the Chilean Association of Au-
tomatic Control (ICA-ACCA), pages 1–6. IEEE.
Forssell, U. and Ljung, L. (1999). Closed-loop identifica-
tion revisited. Automatica, 35(7):1215–1241.
Goodwin, G. C., Graebe, S. F., Salgado, M. E., et al. (2001).
Control system design, volume 240. Prentice Hall Up-
per Saddle River.
Keviczky, L. and B
´
any
´
asz, C. (2007). Future of the
smith predictor based regulators comparing to youla
parametrization. In 2007 Mediterranean Conference
on Control & Automation, pages 1–5. IEEE.
Kilbas, A. A., Marichev, O., and Samko, S. (1993). Frac-
tional integrals and derivatives (theory and applica-
tions).
Kilbas, A. A., Srivastava, H. M., and Trujillo, J. J.
(2006). Theory and applications of fractional differ-
ential equations, volume 204. elsevier.
Ku
ˇ
cera, V. (2007). Polynomial control: past, present, and
future. International Journal of Robust and Nonlinear
Control: IFAC-Affiliated Journal, 17(8):682–705.
Mahtout, I., Navas, F., Milan
´
es, V., and Nashashibi, F.
(2020). Advances in youla-kucera parametrization: A
review. Annual Reviews in Control, 49:81–94.
Palacios, J., Teodoro, A. D., Fuenmayor, E., and Contreras,
E. (2023). A fractional matter sector for general rela-
tivity. The European Physical Journal C, 83(10):894.
Petr
´
a
ˇ
s, I. and Petr
´
a
ˇ
s, I. (2011). Stability of fractional-order
systems. Fractional-Order Nonlinear Systems: Mod-
eling, Analysis and Simulation, pages 55–101.
Podlubny, I. (1994). Fractional-order systems and
fractional-order controllers. Institute of Experimen-
tal Physics, Slovak Academy of Sciences, Kosice,
12(3):1–18.
Ranganayakulu, R., Babu, G. U. B., Rao, A. S., and Patle,
D. S. (2016). A comparative study of fractional or-
der piλ/piλdµ tuning rules for stable first order plus
time delay processes. Resource-Efficient Technolo-
gies, 2:S136–S152.
Smith, C. A. and Corripio, A. B. (2005). Principles and
practices of automatic process control. John wiley &
sons.
Stein, E. M. and Shakarchi, R. (2009). Real analysis: mea-
sure theory, integration, and Hilbert spaces. Princeton
University Press.
Tavazoei, M. and Asemani, M. H. (2020). On robust stabil-
ity of incommensurate fractional-order systems. Com-
munications in Nonlinear Science and Numerical Sim-
ulation, 90:105344.
Tepljakov, A., Alagoz, B. B., Yeroglu, C., Gonzalez, E. A.,
Hosseinnia, S. H., Petlenkov, E., Ates, A., and Cech,
M. (2021). Towards industrialization of fopid con-
trollers: A survey on milestones of fractional-order
control and pathways for future developments. IEEE
Access, 9:21016–21042.
Tepljakov, A. and Tepljakov, A. (2017). Fom-
con: fractional-order modeling and control toolbox.
Fractional-order modeling and control of dynamic
systems, pages 107–129.
Valderrama, F., Ruiz, F., Vicino, A., and Garulli, A. (2020).
A youla-kucera parametrization for data-driven con-
trollers tuning. IFAC-PapersOnLine, 53(2):3989–
3994.
Youla, D., Bongiorno, J., and Jabr, H. (1976). Modern
wiener–hopf design of optimal controllers part i: The
single-input-output case. IEEE Transactions on Auto-
matic Control, 21(1):3–13.
An Approach for Fractional Commensurate Order Youla Parametrization using q-weighted Operator
713
