Uncertainty-Aware DNN for Multi-Modal Camera Localization
M. Vaghi
1 a
, A. L. Ballardini
2 b
, S. Fontana
1 c
and D. G. Sorrenti
1 d
1
Universit
`
a degli Studi di Milano - Bicocca, Milan, Italy
2
Universidad de Alcal
´
a, Alcal
´
a de Henares, Spain
Keywords:
Camera Localization, Deep Learning, Uncertainty Estimation.
Abstract:
Camera localization, i.e., camera pose regression, represents an important task in computer vision with many
practical applications such as in the context of intelligent vehicles and their localization. Having reliable es-
timates of the regression uncertainties is also important, as it would allow us to catch dangerous localization
failures. In the literature, uncertainty estimation in Deep Neural Networks (DNNs) is often performed through
sampling methods, such as Monte Carlo Dropout (MCD) and Deep Ensemble (DE), at the expense of un-
desirable execution time or an increase in hardware resources. In this work, we considered an uncertainty
estimation approach named Deep Evidential Regression (DER) that avoids any sampling technique, providing
direct uncertainty estimates. Our goal is to provide a systematic approach to intercept localization failures
of camera localization systems based on DNNs architectures, by analyzing the generated uncertainties. We
propose to exploit CMRNet, a DNN approach for multi-modal image to LiDAR map registration, by mod-
ifying its internal configuration to allow for extensive experimental activity on two different datasets. The
experimental section highlights CMRNet’s major flaws and proves that our proposal does not compromise the
original localization performances, but also provides the necessary introspection measures that would allow
end-users to act accordingly.
1 INTRODUCTION
Although DNN-based techniques achieve outstanding
results in camera localization (Radwan et al., 2018;
Sarlin et al., 2021), a main challenge is still unsolved:
to determine when such models are providing a re-
liable localization output since inaccurate estimates
could endanger other road users. Therefore, being
able to assign a reliable degree of uncertainty to the
model predictions allows us to decide whether the
outputs can be safely used for navigation (McAllister
et al., 2017).
The uncertainty associated with the model output
can be of two different types: aleatoric and epistemic.
“Aleatoric uncertainty represents the effect on the out-
put given by variability of the input data that can-
not be modeled: this uncertainty cannot be reduced
even if more data were to be collected. Epistemic
uncertainty, on the other hand, quantifies the lack of
knowledge of a model, which arises from the limited
a
https://orcid.org/0000-0003-1093-7270
b
https://orcid.org/0000-0001-6688-5081
c
https://orcid.org/0000-0001-7823-8973
d
https://orcid.org/0000-0002-4734-7330
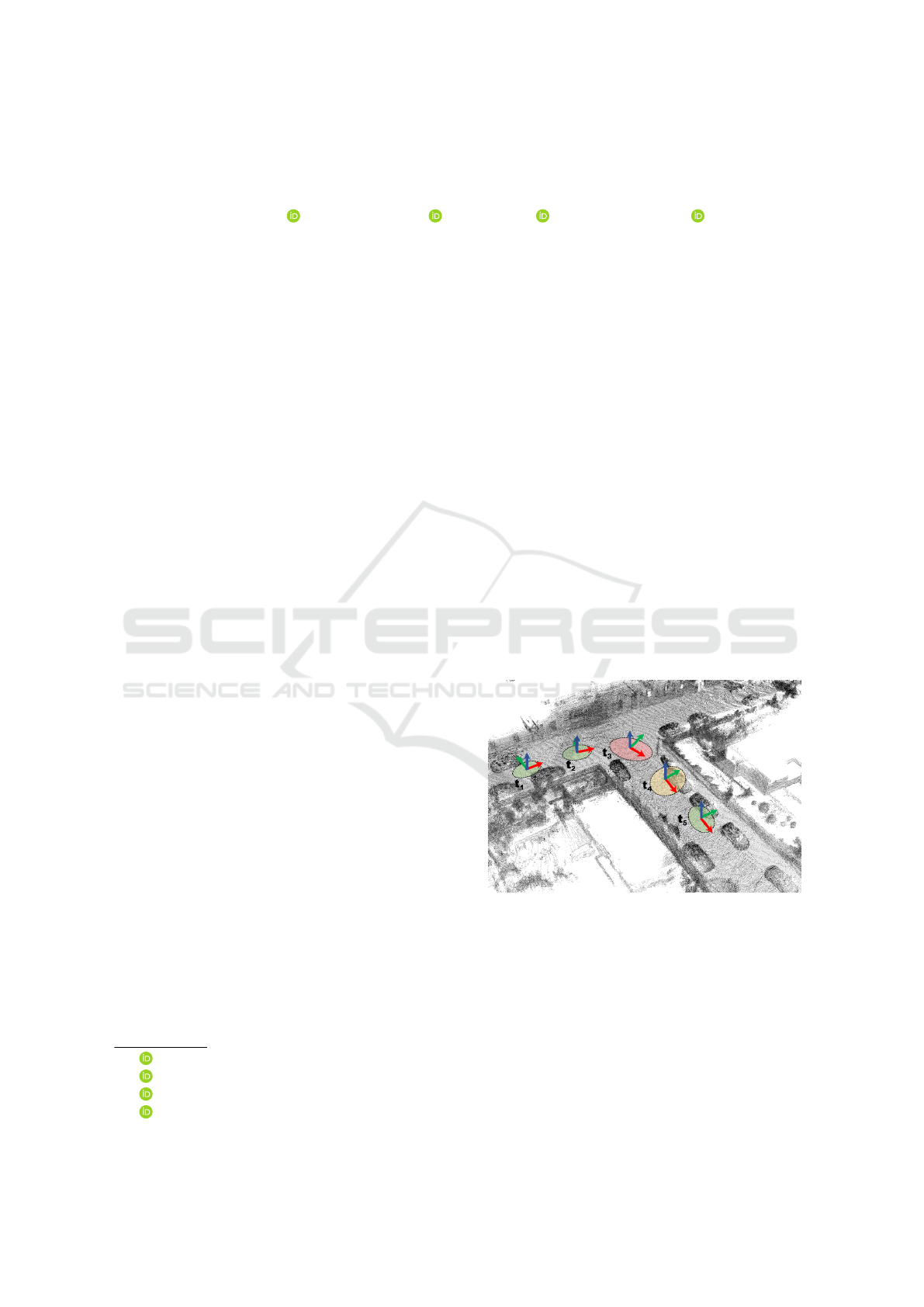
Figure 1: We compare three approaches for estimating un-
certainty in DNNs for camera localization by integrating
them in a camera-to-LiDAR map registration model. We
assess uncertainty quality by measuring calibration, show-
ing that we obtain competitive results with a DER-based
approach.
amount of data used for tuning its parameters. This
uncertainty can be mitigated with the usage of more
data.” Adapted from (Kendall and Gal, 2017).
DNN-based camera localization proposals that
also estimate uncertainty already exist in the litera-
ture, e.g., (Kendall and Cipolla, 2016; Deng et al.,
80
Vaghi, M., Ballardini, A. L., Fontana, S. and Sorrenti, D. G.
Uncertainty-Aware DNN for Multi-Modal Camera Localization.
DOI: 10.5220/0013064600003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 80-90
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

2022). However, only partial comparisons with the
consolidated approaches are available, e.g., (Kendall
and Cipolla, 2016) just deals with MCD. In ad-
dition, since those techniques deal only with image
data, their effectiveness with multi-modal approaches
should be explored.
Given the importance of uncertainty estimation
for DNN-based camera localization, in this work we
propose an application of DER for epistemic uncer-
tainty estimation in Convolutional Neural Networks
(CNNs) within a multi-modal camera localization ap-
proach, and show that the proposed approach achieves
competitive results compared to other sampling-based
techniques (Gal and Ghahramani, 2016; Lakshmi-
narayanan et al., 2017) in terms of localization ac-
curacy, uncertainty calibration, and failures detection
(Figure 1). We chose CMRNet (Cattaneo et al., 2019),
an approach for camera localization using a camera
image and an available 3D map, typically built from
LiDAR data. The reason for this is the ability of such
a model to provide accurate localisation estimates at
high frequencies allowing it to be used in a more re-
alistic scenario. Moreover, we consider it significant
to have developed a version of a camera localization
DNN model that is able to estimate uncertainty by us-
ing DER.
2 RELATED WORK
In the last decade, many DNN-based approaches for
camera localization emerged. In general, we can
divide existing methods into two categories: cam-
era pose regression (Kendall et al., 2015; Kendall
and Cipolla, 2017; Radwan et al., 2018; Yin and
Shi, 2018; Sarlin et al., 2021) and place recognition
(Arandjelovic et al., 2016; Zhu et al., 2018; Hausler
et al., 2021) techniques.
Using an image, the former category predicts
the pose of a camera, while the latter finds a cor-
respondence with a previously visited location, de-
picted in another image. Multi-modal approaches,
which employ image and Light Detection And Rang-
ing (LiDAR) data, propose to jointly exploit visual in-
formation and the 3D geometry of a scene to achieve
higher localization accuracy (Wolcott and Eustice,
2014; Caselitz et al., 2016; Neubert et al., 2017). Re-
cently, DNN-based methods emerged also for image-
to-LiDAR-map registration. An example is CMRNet
(Cattaneo et al., 2019), which performs direct re-
gression of the camera pose by implicitly matching
RGB images with the corresponding synthetic LiDAR
image generated using a LiDAR map and a rough
camera pose estimate. Its ultimate goal is to re-
fine common GPS localization measures. CMRNet
is map-agnostic. Feng et al. (Feng et al., 2019) pro-
posed another multi-modal approach, where a DNN is
trained to extract descriptors from 2D and 3D patches
by defining a shared feature space between hetero-
geneous data. Localization is then performed by
exploiting points for which 2D-3D correspondences
have been found. Similarly, Cattaneo et al. (Cat-
taneo et al., 2020) proposed a DNN-based method
for learning a common feature space between images
and LiDAR maps to produce global descriptors, used
for place recognition. Although the previous multi-
modal pose regression techniques achieve outstanding
results, none of them estimate the epistemic uncer-
tainty of their predictions. This is a severe limitation,
especially considering the final goal: to deploy them
in critical scenarios, where it is important to detect
when the model is likely to fail.
Epistemic uncertainty estimation in Neural Net-
works (NNs) is a known problem. In the last years,
different methods have been proposed to sample from
the model posterior (Kingma et al., 2015; Lakshmi-
narayanan et al., 2017) and, more recently, to pro-
vide a direct uncertainty estimate through eviden-
tial deep learning (Sensoy et al., 2018; Amini et al.,
2020; Meinert and Lavin, 2021). NNs uncertainty es-
timation gained popularity also in the computer vi-
sion field (Kendall and Gal, 2017; Kendall et al.,
2018), and different uncertainty-aware camera-based
localization approaches have been proposed. For in-
stance, Kendall et al. (Kendall and Cipolla, 2016)
introduced Bayesian PoseNet, a DNN that estimates
the camera pose parameters and uncertainty by ap-
proximating the model posterior employing dropout
sampling (Gal and Ghahramani, 2016). Deng et al.
(Deng et al., 2022) proposed another uncertainty-
aware model, which relies on Bingham mixture mod-
els for estimating a 6DoF pose from an image. Re-
cently, Petek et al. (Petek et al., 2022) proposed an
approach to camera localization that exploits an ob-
ject detection module, which is used to enable local-
ization within sparse HD maps. In particular, their
method estimates the vehicle pose using the uncer-
tainty of the objects in the HD map using a DER
approach (Amini et al., 2020). Another interesting
approach is HydraNet (Peretroukhin et al., 2019),
which is a neural network for estimating uncertainty
on quaternions. All the mentioned techniques deal
with the problem of camera localization using only
images, they learn to localize a camera in the envi-
ronment represented in the training set. In contrast,
CMRNet is map-agnostic, i.e., by being able to take in
input a LiDAR-map, it can perform localization also
in previously unseen environments. Furthermore, to
Uncertainty-Aware DNN for Multi-Modal Camera Localization
81
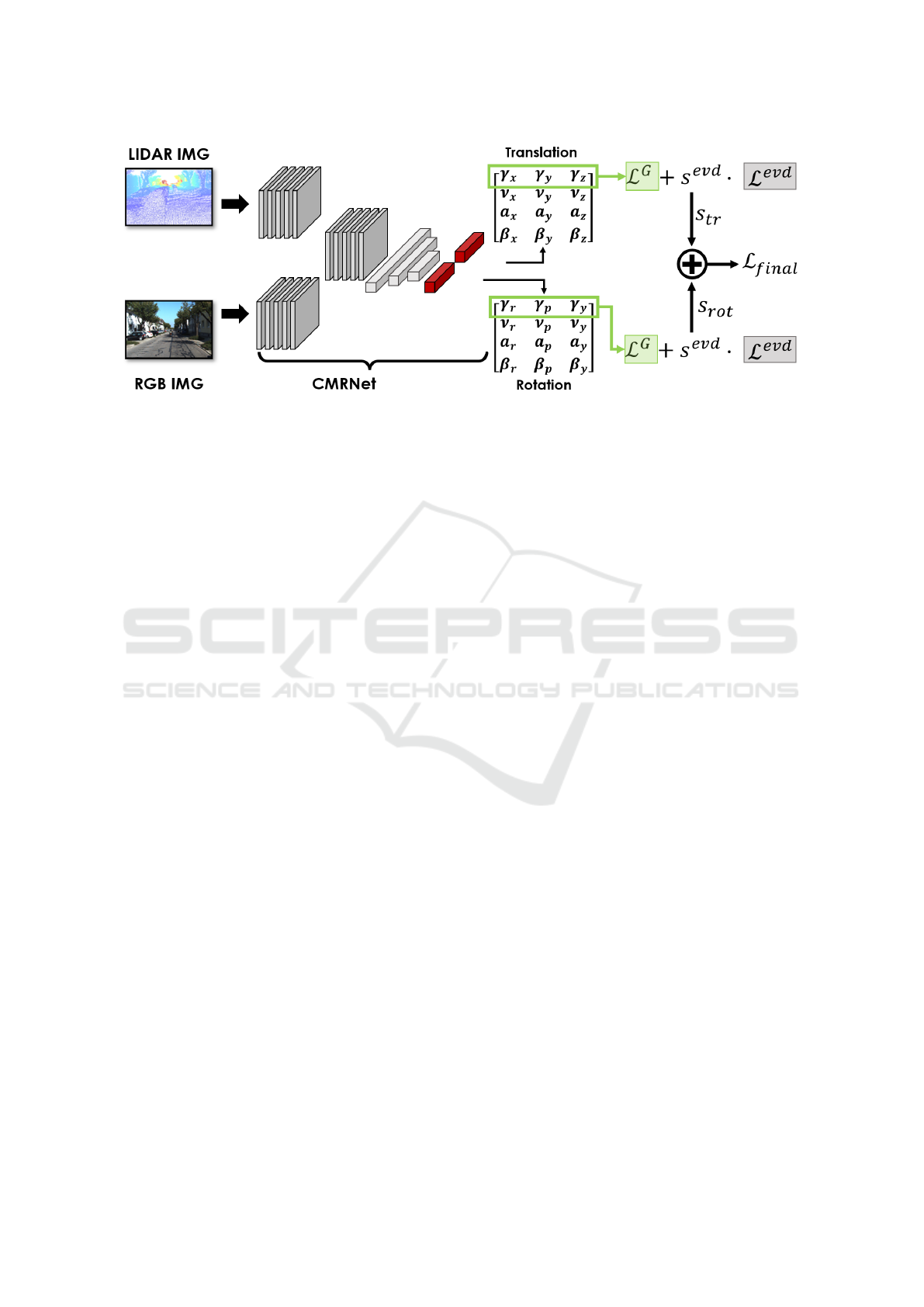
Figure 2: In this picture the CMRNet + DER approach is shown. The last FC-layers (red) are modified according to the method
proposed by Amini et al. (Amini et al., 2020) for estimating the parameters m
i
= (γ
i
, ν
i
, α
i
, β
i
) of different Normal Inverse
Gamma (NIG) distributions. During training, L
G
(green) and L
evd
(grey) loss functions are computed both for translation and
rotation components.
the best of our knowledge, this is the first work to
implement a DER-based approach for direct camera
localization.
3 METHOD
In this section, we present the methodology used to
integrate DER (Amini et al., 2020) and the popular
sampling techniques of MCD (Gal and Ghahramani,
2016) and DE (Lakshminarayanan et al., 2017) into a
camera localization model. Although they all assume
that epistemic uncertainty can be described by a nor-
mal distribution, they are different techniques and re-
quire different interventions on the network to which
they are applied. Therefore, in this section, we first in-
troduce and then describe the modifications required
in CMRNet to estimate uncertainty using each of the
three different methods.
3.1 Introduction to CMRNet
CMRNet is a regression Convolutional Neural Net-
work (CNN) used to estimate the 6DoF pose of a cam-
era mounted on-board a vehicle navigating within a
LiDAR map (Cattaneo et al., 2019). In particular, this
model takes two different images as input: an RGB
image and a LiDAR image obtained by synthesizing
the map as viewed from an initial rough camera pose
estimate H
init
. CMRNet performs localization by im-
plicitly matching features extracted from both images,
and estimates the misalignment H
out
between the ini-
tial and the camera pose. In this case, H represents a
generic rototranslation matrix:
H =
R
(3,3)
T
(3,1)
0
(1,3)
1
∈ SE(3) (1)
where R
(3,3)
and T
(3,1)
are a rotation matrix and a
translation vector respectively. In particular, H
out
is
computed as: tr
(1,3)
= (x, y, z) for translations, and
unit quaternion q
(1,4)
= (q
x
, q
y
, q
z
, q
w
) for rotations.
We propose to estimate its epistemic uncertainty by
providing a reliability value for each pose component.
The estimation of possible cross-correlations between
the pose components has not been considered in this
paper.
3.2 Uncertainty-Aware CMRNet
We define an input camera image with I
c
, an input
LiDAR image as I
l
, a set of trained weights with W
and an Uncertainty Aware (UA) version of CMRNet
as a function f (I
c
, I
l
, W).
Monte Carlo Dropout: The idea behind MCD is to
sample from a posterior distribution by providing dif-
ferent output estimates given a single input, which
are later used for computing the mean and variance
of a Gaussian distribution. This sampling is per-
formed by randomly deactivating the weights of the
fully-connected layers using a random dropout func-
tion d(W, p) multiple times during model inference,
where p represents the dropout probability. There-
fore, for MCD there is no modification of the network
architecture. We applied the dropout to the regres-
sion part of the original CMRNet architecture. When
many correlations between RGB and LiDAR features
are found, we expect to obtain similar samples, de-
spite the dropout application, that is, we expect our
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
82

model to be more confident with respect to its predic-
tions. For each pose parameter µ
i
, we compute the
predicted value and the corresponding epistemic un-
certainty as follows:
E [µ
i
] =
1
n
·
∑
n
f (I
c
, I
l
, d
regr
(W, p)),
Var[µ
i
] =
1
n
·
∑
n
( f (I
c
, I
l
, d
regr
(W, p)) − E [µ
i
])
2
(2)
where n is the number of samples drawn for a given
input. Please note that E [µ
i
] and Var[µ
i
], for the ori-
entation, are computed after the conversion from unit
quaternion to Euler angles.
Deep Ensemble: DE-based approaches perform pos-
terior sampling by exploiting different models trained
using different initialization of the weights, but shar-
ing the same architecture.
Using different parameterizations of the same
model leads to the recognition of a wider range of
data-patterns, and to an increment of the overall ac-
curacy (Fort et al., 2019). On the other hand, when
receiving in input patterns not well-represented in the
training set, all the Neural Network (NN)s in the en-
semble would give out low-quality results, so leading
to an increment of variance. In our case, we expect to
obtain large epistemic uncertainty when each model
identifies a different set of correspondences between
RGB and LiDAR features, leading to significant dif-
ferent pose estimates. By training CMRNet n times
with different random initializations, we obtain a set
of weights W
set
= {W
1
, ..., W
n
}, which describe dif-
ferent local minima of the model function f (·). For
each pose parameter µ
i
we compute the predicted ex-
pected value and the corresponding epistemic uncer-
tainty as follows:
E [µ
i
] =
1
n
·
n
∑
j=1
f (I
c
, I
l
, W
j
),
Var[µ
i
] =
1
n
·
n
∑
j=1
( f (I
c
, I
l
, W
j
) − E [µ
i
])
2
(3)
where n represents the number of models of the en-
semble. In this case too, E [µ
i
] and Var[µ
i
] of rotations
are computed after the conversion from unit quater-
nion to Euler angles.
Deep Evidential Regression: While adapting to
MCD and DE methods does not require particular
modifications of CMRNet, the technique proposed by
Amini et al. (Amini et al., 2020) requires substantial
changes both in the training procedure and in the final
part of the architecture.
In Deep Evidential Regression, the main goal
is to estimate the parameters of a Normal Inverse
Gamma distribution NIG(γ, ν, α, β). A neural net-
work is trained to estimate the NIG parameters, which
are then used to compute the expected value and the
corresponding epistemic uncertainty, for each pose
parameter:
E [µ] = γ, Var[µ] =
β
ν(α − 1)
(4)
To train the model, the authors propose to exploit
the Negative Log Likelihood L
NLL
and the Regular-
ization L
R
loss functions to maximize and regularize
evidence:
L(W) = L
NLL
(W) + λ · L
R
(W) (5)
L
NLL
= −log p(y|m) L
R
= Φ · |y − γ| (6)
where Φ = 2ν + α is the amount of evidence, see
(Amini et al., 2020) for details, and λ represents a
manually-set parameter that affects the scale of un-
certainty, p(y|m) represents the likelihood of the NIG.
Note that, p(y|m) is a pdf that follows a t-Student dis-
tribution St(γ,
β(1+ν)
να
, 2α) evaluated with respect to a
target y.
One of the main advantages of DER is to provide a
direct estimate of epistemic uncertainty and to employ
less resources than sampling-based methods. For a
complete description of loss functions and theoretical
aspects of DER, please refer to the work of Amini et
al. (Amini et al., 2020).
To integrate DER within CMRNet, we need to
deal with the following issues: how to apply DER
for regressing multiple parameters, how to manage
rotations, and how to aggregate the results when com-
puting the final loss. We changed the last FC-layers,
which predict the rotation q
(1,4)
= (q
x
, q
y
, q
z
, q
w
) and
translation tr
(1,3)
= (x, y, z) components, in order to
estimate the NIG distributions associated to each pose
parameter. As it can be seen in Figure 2, we modified
CMRNet to regress Euler angles instead of quater-
nions, then we changed the FC-layers to produce
the matrices eul
(4,3)
and tr
(4,3)
, where each column
|γ
i
, ν
i
, α
i
, β
i
|
′
represents a specific NIG (Amini et al.,
2020).
Since the original CMRNet model represents rota-
tions using unit quaternions q
(1,4)
, we cannot compute
the L
NLL
and L
R
loss functions directly, as addition
and multiplication have different behavior on the S
3
manifold. As mentioned above, we modified the last
FC-layer of CMRNet to directly estimate Euler angles
eul
(1,3)
= (r, p, y). We also substitute the quaternion
distance-based loss used in (Cattaneo et al., 2019)
with the smooth L
1
loss (Girshick, 2015), which will
Uncertainty-Aware DNN for Multi-Modal Camera Localization
83

be later used also in L
R
and L
D
, by also consider-
ing the discontinuities of Euler angles. Although the
Euler angles representation is not optimal (Schneider
et al., 2017), it allows for easier management of the
training procedure and enables a direct comprehen-
sion of uncertainty for rotational components. As we
will demonstrate in Sec. 4, this change does not pro-
duce a decrease in accuracy.
Since CMRNet performs multiple regressions, it
is necessary to establish an aggregation rule for the
L
NLL
and L
R
loss functions, which are computed for
each predicted pose parameter. With the application
of the original loss as in (Amini et al., 2020) we expe-
rienced unsatisfactory results. We are under the im-
pression that, in our task, L
NLL
presents an undesir-
able behavior: since the negative logarithm function
is calculated over a probability density, it is not lower
bound, as the density gets near to be a delta.
We propose to overcome the previous issues by
avoiding the computation of the logarithm and con-
sidering a distance function that is directly based on
the probability density p(y|m), that is the pdf of the
t-Student distribution. Therefore, we replaced L
NLL
with the following loss L
D
and we also reformulate
L
R
:
L
D
=
1
n
·
n
∑
i=1
d(p(y
i
|m
i
)
−1
, 0)
L
R
=
1
n
·
n
∑
i=1
d(y
i
, γ
i
) · Φ
i
(7)
Similarly to L
NLL
, the idea behind L
D
is to pe-
nalize predictions according to the confidence level
output by our model with respect to the deviation be-
tween a target and an estimated values. However,
since this loss function admits a lower bound and is
defined in the positive interval, it allows direct com-
putation of a distance metric d(·) on the vector of in-
verse densities. To ensure a better numerical stability,
we clip p(y
i
|m
i
) when it returns too low density val-
ues, i.e., < 0.04. Regarding L
R
, we simply scale the
distance error on each pose component with the re-
spective evidence. We the compute the mean error by
managing rotations and translations separately. The
final evidence loss is computed as follows:
L
evd
= L
D
+ λL
R
(8)
We noticed that the localization accuracy was de-
creasing when employing only L
evd
during training.
Therefore, we opted to also employ the original ge-
ometric loss function L
G
tr
used in (Cattaneo et al.,
2019), and to employ the smooth L1 loss on rotations
as geometric loss L
G
rot
.
The overall loss is therefore computed as follows:
L
rot
= L
G
rot
+ s
evd
rot
· L
evd
rot
L
tr
= L
G
tr
+ s
evd
tr
· L
evd
tr
(9)
L
f inal
= s
rot
· L
rot
+ s
tr
· L
tr
(10)
where the s hyper-parameters represent scaling fac-
tors.
3.3 Training Details
For all three methods (i.e., MCD, DE, DER), we fol-
lowed a similar training procedure as in (Cattaneo
et al., 2019). We trained all models from scratch for a
total of 400 epochs, by fixing a learning rate of 1e
−4
,
by using the ADAM optimizer and a batch size of 24
on a single NVidia GTX1080ti. The code was imple-
mented with the PyTorch library (Paszke et al., 2019).
Concerning the DE models, random weights ini-
tialization was performed by defining a random
seed before each training. For DER we ini-
tially fixed the scaling parameters (s
rot
, s
tr
, λ
rot
λ
tr
) =
(1., 1., 0.01, 0.1) and (s
evd
rot
, s
evd
tr
) = (0.1, 0.1). How-
ever, we experienced an increment of L
evd
after ap-
proximately 150 epochs. Therefore, we decided to
stop the training, change (s
evd
rot
, s
evd
tr
) = (5e
−3
, 5e
−3
),
and then proceed with the training. This modifica-
tion mitigated overfitting. Deactivating L
evd
during
the second training step led to uncalibrated uncertain-
ties.
4 EXPERIMENTAL RESULTS
The experimental activity described in the follow-
ing section has a dual purpose. On the one hand, it
proves that the localization performances of the pro-
posed models achieve comparable results concerning
the original CMRNet implementation, providing at
the same time reliable uncertainty estimates. On the
other hand, we propose one possible application of the
estimated uncertainties through a rejection scheme for
the vehicle localization problem.
4.1 Dataset
We used the KITTI odometry (Geiger et al., 2012)
and KITTI360 (Liao et al., 2022) datasets to train and
validate our models, implying that for each proposed
method we have two distinct training procedures, i.e.,
one for each dataset.
For the KITTI dataset, we followed the exper-
imental setting proposed in (Cattaneo et al., 2019)
and used images and LiDAR data from KITTI se-
quences 03 to 09, and sequence 00 for the assessment
of the estimated-uncertainty quality. Run 00 presents
a negligible overlap of approximately 4% compared
to the other sequences, i.e., resulting in a fair valida-
tion containing a different environment never seen by
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
84
Table 1: Localization Results.
KITTI KITTI360
Method
Translation Error (m) Rotation Error (deg) Translation Error (m) Rotation Error (deg)
median mean/std median mean/std median mean/std median mean/std
Rough Initial Pose 1.88 1.82 ± 0.56 9.8 9.6 ± 2.8 1.87 1.82 ± 0.56 9.8 9.6 ± 2.8
CMRNet (no iter) 0.52 0.65 ± 0.45 1.3 1.6 ± 1.2 0.40 0.48 ± 0.35 1.2 1.3 ± 0.8
CMRNet + MCD 0.58 0.69 ± 0.44 1.8 2.1 ± 1.3 0.44 0.52 ± 0.34 1.8 1.9 ± 1.0
CMRNet + DE 0.47 0.57 ± 0.39 1.2 1.5 ± 1.1 0.33 0.40 ± 0.29 1.0 1.2 ± 0.7
CMRNet + DER 0.54 0.65 ± 0.46 1.8 2.1 ± 1.4 0.39 0.48 ± 0.35 1.6 1.8 ± 1.0
Localization results of different CMRNet versions. We present the results of the original model without any iterative refine-
ment (no iter), but the same strategy proposed in (Cattaneo et al., 2019) could be applied to all the other methods. Note that,
we do not alter CMRNet accuracy without DER-based approach.
CMRNet at training time. We exploited the ground
truth poses provided by (Behley et al., 2019) to cre-
ate accurate LiDAR maps. To simulate the initial
rough pose estimate, we added uniformly distributed
noise both on translation [−2m; +2m] and rotation
components [−10
◦
;+10
◦
]. To mimic real-life usage
and differently from (Cattaneo et al., 2019), we re-
moved all dynamic objects (e.g., cars and pedestrians)
from within the LiDAR maps, allowing some mis-
matches between the RGB image and the LiDAR im-
age. This aspect makes the task more difficult since
now CMRNet has also to implicitly learn how to dis-
card incorrect matches.
We followed the previous procedure with the
KITTI360 dataset and we used sequences from 03 to
10 (∼ 40k samples) for training, run 02 (∼ 10.5k sam-
ples) for testing and sequence 00 (∼ 11.5k samples)
for validation.
4.2 Evaluation Metrics
We evaluated the proposed methods by comparing
both localization estimates and uncertainty calibration
accuracies. In particular, we assessed the localization
by measuring the euclidean and quaternion distances
between the ground truth and the estimated transla-
tion/rotation components. When considering DER,
we compute the quaternion distance by initially per-
forming a conversion from euler angles to unit quater-
nion.
Note that, differently from (Cattaneo et al., 2019),
our main goal is not to minimize the localization er-
ror. Instead, we aim to provide a reliability estimate
by means of epistemic uncertainty estimation without
undermining CMRNet performance. In particular, we
verified the accuracy of the estimated uncertainty us-
ing the calibration curves proposed by Kuleshov et
al. (Kuleshov et al., 2018). This procedure allows
us to reveal whether the trained model produces in-
flated or underestimated uncertainties, by comparing
the observed and the ideal confidence level.
4.3 Localization Assessment
Our experimental activities encompass the evaluation
of the localization performances using all the methods
presented in section 3.2, with respect to the original
CMRNet proposal.
Concerning CMRNet + MCD, we applied the
dropout to the FC layers with a probability of 0.3 and
obtained the approximated epistemic uncertainty by
exploiting 30 samples. Our extensive experimental
activity proves this setting provides the best trade-off
between accuracy, uncertainty calibration, and com-
putational time.
We implemented a similar approach to identify the
suitable number of networks as regards the CMRNet
+ DE approach. Here we identified the best perfor-
mances in using 5 networks, not noticing any perfor-
mance gain by adding more models to the ensemble.
Table 1 shows the obtained localization results, to-
gether with the statistics of the initial rough pose dis-
tribution and, in general, we observe the same trend
for each method across the KITTI and KITTI360
datasets. In particular, MCD decreases the perfor-
mances of the original CMRNet, resulting in the worst
method among those evaluated. On the other hand,
CMRNet + DE achieves the best results in terms of
accuracy, at the expense of having to train and exe-
cute n different networks. This method reduces the er-
rors’ standard deviation, as expected from ensemble-
based methods. Lastly, CMRNet + DER achieves re-
sults comparable to the original CMRNet implemen-
tation, proving that our modifications had any nega-
tive effect in terms of accuracy. Some applications
would appreciate the benefits that such an approach
provides: a direct estimate of epistemic uncertainty,
i.e., a reduced computational time and space required
for inference, because of the absence of sampling. Ta-
ble 2 reports a brief ablation study performed on the
KITTI dataset to find the optimal training parameter-
ization from which we obtained the best DER-based
model (last row). As shown in the previous localiza-
Uncertainty-Aware DNN for Multi-Modal Camera Localization
85
Table 2: Ablation study CMRNet + DER - KITTI dataset.
L
evd
L
G
s
evd
Loc. Error (mean/std) Calib. Error (mean/std)
Tr. (m) Rot. (°) Tr. Rot.
L
NLL
- 1. 1.23 ± 0.57 2.0 ± 1.7 .080 ± .069 .135 ± .082
L
D
- 1. 0.91 ± 0.53 2.6 ± 1.5 .041 ± .041 .080 ± .074
L
NLL
1e
−1
0.90 ± 0.56 1.8 ± 1.4 .090 ± .056 .172 ± .120
L
D
1e
−1
074 ± 0.49 2.5 ± 1.4 .035 ± .027 .093 ± .079
L
NLL
5e
−3
† 0.68 ± 0.49 1.7 ± 1.3 .107 ± .073 .150 ± .010
L
D
5e
−3
† 0.65 ± 0.46 2.1 ± 1.4 .063 ± .040 .076 ± .060
† is the two training steps procedure described in section 3C.
Table 3: Mean Calibration Errors.
KITTI KITTI360
Axis MCD DE DER MCD DE DER
x 0.045 ± 0.025 0.077 ± 0.040 0.042 ± 0.023 0.054 ± 0.044 0.064 ± 0.040 0.018 ± 0.010
y 0.066 ± 0.032 0.093 ± 0.056 0.081 ± 0.052 0.042 ± 0.028 0.092 ± 0.061 0.026 ± 0.013
z 0.148 ± 0.082 0.062 ± 0.036 0.067 ± 0.027 0.171 ± 0.098 0.045 ± 0.022 0.080 ± 0.056
roll 0.126 ± 0.069 0.068 ± 0.033 0.080 ± 0.043 0.157 ± 0.092 0.149 ± 0.088 0.098 ± 0.054
pitch 0.162 ± 0.092 0.050 ± 0.041 0.106 ± 0.063 0.162 ± 0.091 0.123 ± 0.069 0.108 ± 0.069
yaw 0.069 ± 0.049 0.089 ± 0.057 0.042 ± 0.035 0.076 ± 0.042 0.067 ± 0.038 0.092 ± 0.052
Table 4: Localization Results - Discarded Predictions.
KITTI KITTI360
Method
Transl. Error (m) Rot. Error (deg) Discarded
Pred.
Transl. Error (m) Rot. Error (deg) Discarded
Pred.median mean/std median mean/std median mean/std median mean/std
MCD 0.58 0.68 ± 0.43 1.7 2.0 ± 1.2 27.2% 0.51 0.52 ± 0.34 1.7 1.8 ± 1.0 27.5 %
DE 0.42 0.50 ± 0.32 1.1 1.3 ± 0.8 24.7% 0.29 0.34 ± 0.22 1.0 1.1 ± 0.6 24.9 %
DER 0.49 0.58 ± 0.38 1.6 1.9 ± 1.1 22.0% 0.35 0.41 ± 0.26 1.5 1.6 ± 0.8 23.8%
tion accuracy experiments, such a parameterization
also gives optimal results on the KITTI360 datasets.
We observe the same trend in the uncertainty quality
assessment presented in the following sections.
4.4 Uncertainty Calibration
The quality of the uncertainty estimates, i.e., the mean
calibration errors for the translation and rotation com-
ponents, are reported in Table 3. The errors repre-
sent the mean distances between the ideal (i.e., y = x)
and the observed calibration, for each confidence in-
terval. Furthermore, in Figure 3 we show the cali-
bration curves of the most relevant pose parameters.
All three methods obtain good uncertainty calibra-
tion, i.e., they provide realistic quantities. However,
CMRNet + DER shows a better performance in terms
of mean calibration errors, considering the most im-
portant pose parameters for a ground vehicle (x, y, and
yaw). We observe such a trend on both the datasets
considered during the experimental activity. Having a
well-calibrated uncertainty-aware model with normal
distributions has a major advantage, as its realistic un-
certainty estimates can be employed within error fil-
tering algorithms, such as Kalman filters.
4.5 Inaccurate Predictions Detection
By measuring the calibration we test the ability of an
uncertainty estimator to produce realistic uncertain-
ties. However, we still need to prove a direct propor-
tion between the DNN prediction error and the corre-
sponding uncertainty degree. Besides offering realis-
tic uncertainty estimates, an uncertainty-aware model
should assign a large uncertainty to an inaccurate pre-
diction (Amini et al., 2020). For instance, a higher
level algorithm could exploit a CMRNet estimate ac-
cording to its associated uncertainty, e.g., by deciding
whether to rely only on the measure provided by a
Global Navigation Satellite System (GNSS) or even
the subsequent correction performed by the CNN.
To assess that our model provides large uncertainties
in presence of very inaccurate predictions, we intro-
duce the following threshold-based strategy. For both
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
86
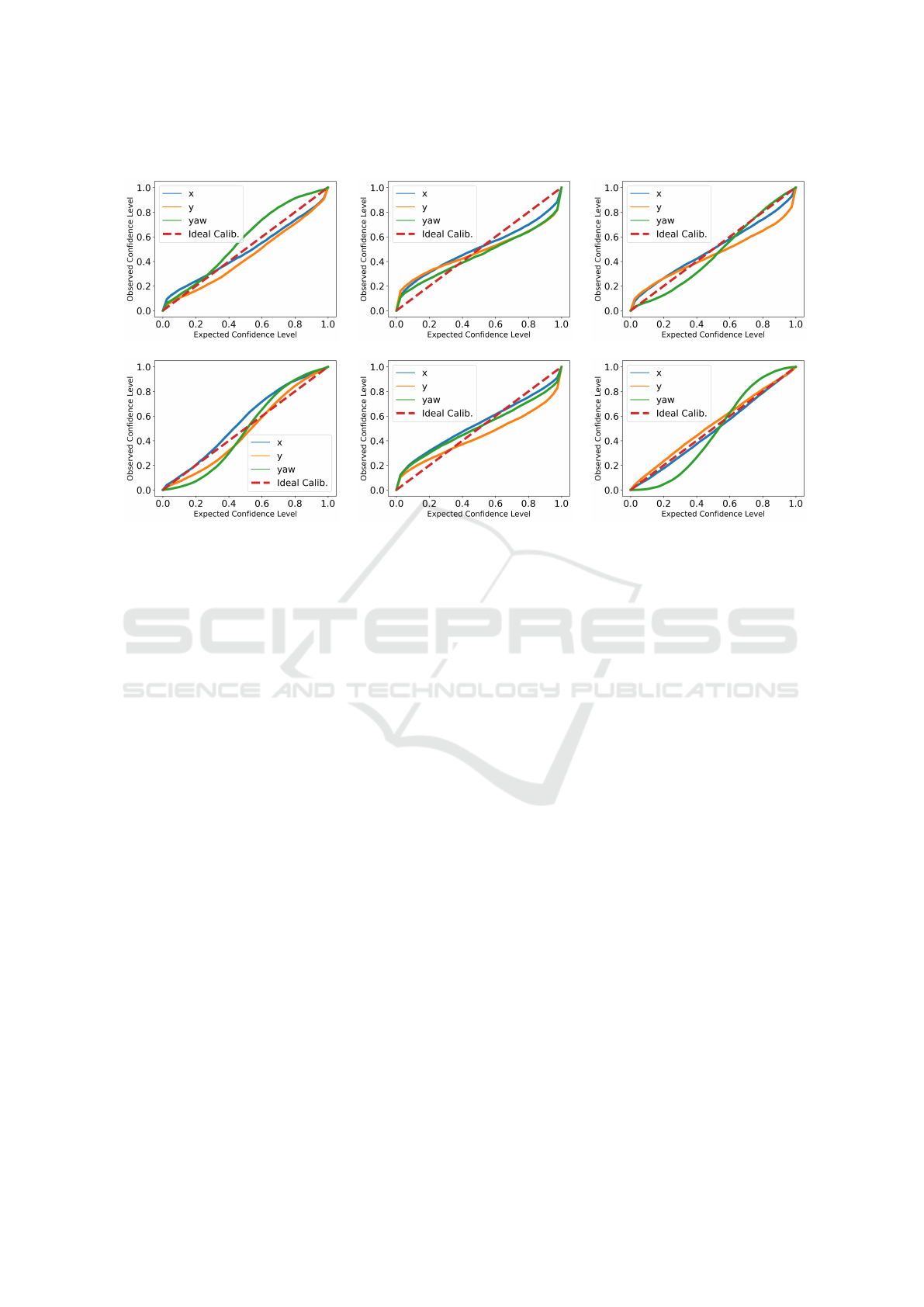
Calibration Plots
KITTI
KITTI360
(a) Monte Carlo Dropout (b) Deep Ensemble (c) Deep Evidential Regression
Figure 3: Calibration curves computed on KITTI and KITTI360 validation sets. On the x axis the expected confidence
level, on the y axis the observed confidence level. All the approaches show a good calibration with respect to the components
considered. However, CMRNet + DER achieves those results with a single shot prediction and avoids any expensive sampling
of uncertainty. For the sake of clarity, we report only the three most important pose parameters, for a ground vehicle, x, y, and
yaw.
translation and rotation, we compute the trace of the
covariance matrix and compare them to a threshold
that allows us to discard predictions with large un-
certainty. Rather than deciding an arbitrary value for
the thresholds, we use the value at the top 15% of
the traces of the entire validation set, respectively for
translation and rotation. The prediction is therefore
discarded when both the trace of the covariance of
the translation and of the covariance of the rotation
are larger than their threshold. In Table 4 we report
the translation and rotation errors, together with the
percentage of discarded predictions by testing the dif-
ferent models on each 00 run of both the KITTI and
KITTI360 datasets. As can be seen, with CMRNet
+ DE we are able to detect inaccurate estimates and
improve the overall accuracy. With CMRNet + DER
we obtain a large localization improvement, outper-
forming the original model. Furthermore, CMRNet +
DER discards fewer predictions than the other meth-
ods on both the KITTI and KITTI360 datasets, which
means that it is able to produce more consistent un-
certainties with respect to the different pose compo-
nents. Although CMRNet + MCD provides good un-
certainty calibration, this model is not able to produce
uncertainty estimates that increase with the predic-
tion accuracy. In fact, we obtain the same localiza-
tion results reported in Table 1 even though such a
method discards the largest amount of samples. In
Figure 4, we report the localization accuracy of each
proposed method by varying the top% threshold used
for discarding predictions. As can be seen, except
for CMRNet + MCD, when the model confidence in-
creases (low uncertainty), its accuracy increases as
well. As can be seen, CMRNet + DER shows a sim-
ilar trend compared to CMRNet + DE, but without
leveraging on expensive sampling techniques. An-
other advantage of CMRNet + DE and CMRNet +
DER is shown in Figure 5. Each plot represents the
same piece of the path (125 frames) of the KITTI 00
run; in this curve, all methods show large localiza-
tion errors. However, by exploiting DE and DER we
are able to detect most localization failures. This is
an interesting property since both DE and DER can
also be exploited as a tool to discover in which scenes
CMRNet is likely to fail, even for datasets without an
accurate pose ground truth.
5 CONCLUSIONS
We proposed an application of state-of-the-art meth-
ods for uncertainty estimation in a multi-modal DNN
for camera localization. In particular, we consid-
ered a direct uncertainty estimation approach named
Uncertainty-Aware DNN for Multi-Modal Camera Localization
87
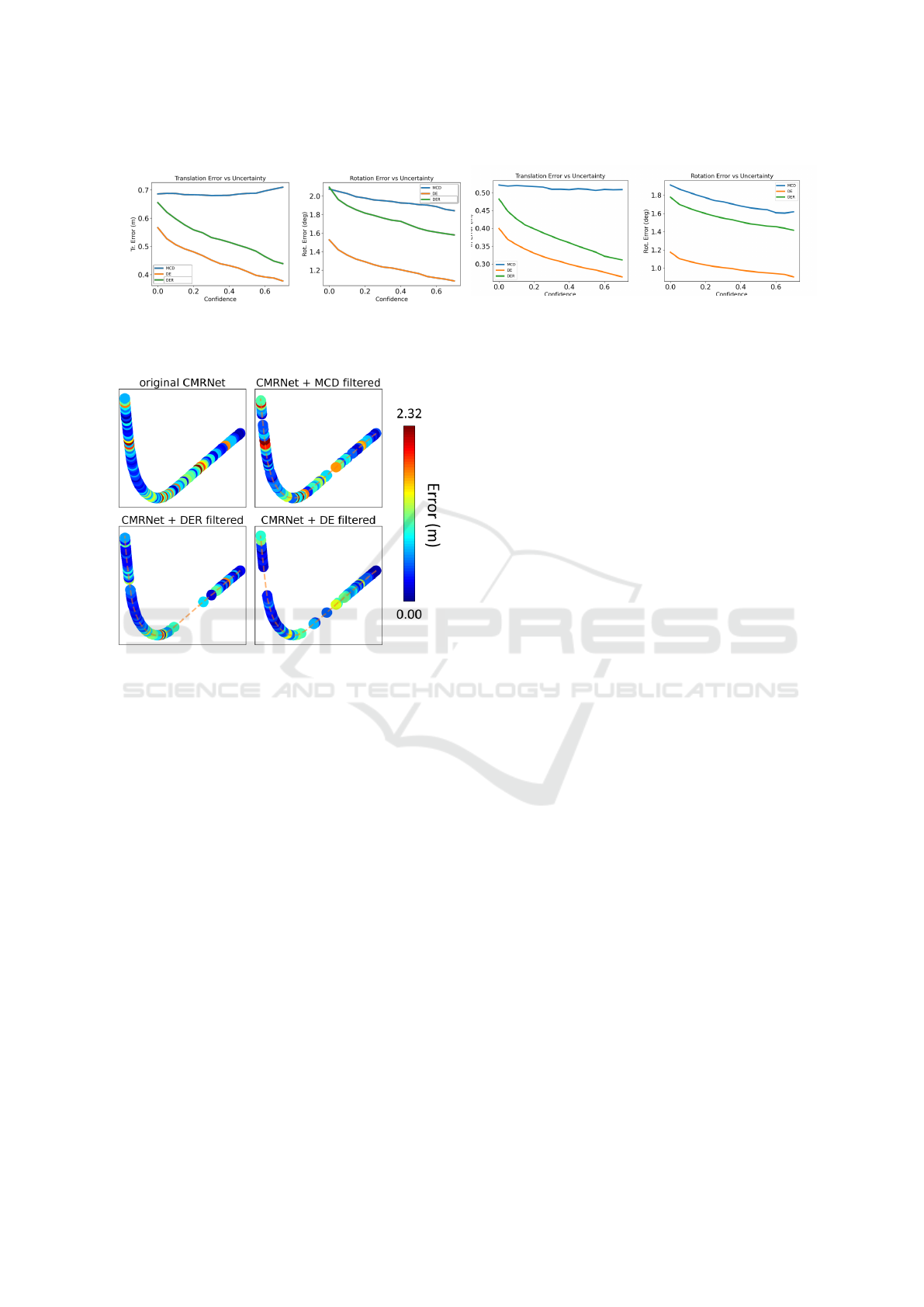
KITTI KITTI360
Figure 4: Prediction errors vs CMRNet confidence level. High confidence coincides with small uncertainty (except for
MCD). Blue color corresponds to MCD, orange to DE, and green to DER. With DE and DER we can assign large uncertainty
to inaccurate predictions.
Figure 5: Qualitative comparison between original
CMRNet and our uncertainty aware models on a slice of
the kitti 00 run. While the original CMRNet provides in-
accurate estimates in the proximity of the depicted curve,
CMRNet + DE and CMRNet + DER are able to identify lo-
calization failures and finally to discard them.
DER (Amini et al., 2020) that we compared to other
two popular sampling-base methods, i.e., MCD and
DE (Gal and Ghahramani, 2016; Lakshminarayanan
et al., 2017). To evaluate these methods, we pro-
posed to integrate them within CMRNet (Cattaneo
et al., 2019), which performs map-agnostic camera
localization by matching a camera observation with
a LiDAR map. As shown in this work, the integra-
tion of DER required several changes in the model
architecture and training procedure. The experiments
performed on the KITTI and KITTI360 datasets eval-
uate localization accuracy and uncertainty calibration,
also assessing the direct proportion between the in-
crease in accuracy and the decrease in the estimated
uncertainty. Although CMRNet + MCD showed good
localization accuracy and uncertainty calibration, it
cannot guarantee that in presence of large uncertainty,
we also obtain large errors. Although this behaviour
was instead observed with CMRNet + DE, together
with an increase in the overall localisation accuracy
and a decrease in the variance of the error distribu-
tion, it should be considered that such a method relies
on multiple model instances by increasing the com-
putational resources required. Finally, without under-
mining its original localization accuracy, we applied
a DER-based approach to CMRNet showing the abil-
ity to provide well-calibrated uncertainties that can be
also employed to detect localization failures using a
one-shot estimation scheme. To the best of our knowl-
edge, this is the first work that integrates a DER-based
approach in a DNN for camera pose regression.
ACKNOWLEDGMENTS
The work of Augusto Luis Ballardini has been funded
by the Mar
´
ıa Zambrano Grants for the attraction of
international talent in Spain.
REFERENCES
Amini, A., Schwarting, W., Soleimany, A., and Rus, D.
(2020). Deep evidential regression. In Larochelle,
H., Ranzato, M., Hadsell, R., Balcan, M., and Lin,
H., editors, Advances in Neural Information Process-
ing Systems, volume 33, pages 14927–14937. Curran
Associates, Inc.
Arandjelovic, R., Gronat, P., Torii, A., Pajdla, T., and Sivic,
J. (2016). Netvlad: Cnn architecture for weakly super-
vised place recognition. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). SemanticKITTI:
A Dataset for Semantic Scene Understanding of Li-
DAR Sequences. In Proc. of the IEEE/CVF Interna-
tional Conf. on Computer Vision (ICCV).
Caselitz, T., Steder, B., Ruhnke, M., and Burgard, W.
(2016). Monocular camera localization in 3d lidar
maps. In 2016 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 1926–
1931.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
88

Cattaneo, D., Vaghi, M., Ballardini, A. L., Fontana, S.,
Sorrenti, D. G., and Burgard, W. (2019). Cmrnet:
Camera to lidar-map registration. In 2019 IEEE In-
telligent Transportation Systems Conference (ITSC),
pages 1283–1289.
Cattaneo, D., Vaghi, M., Fontana, S., Ballardini, A. L., and
Sorrenti, D. G. (2020). Global visual localization in
lidar-maps through shared 2d-3d embedding space. In
2020 IEEE International Conference on Robotics and
Automation (ICRA), pages 4365–4371.
Deng, H., Bui, M., Navab, N., Guibas, L., Ilic, S., and
Birdal, T. (2022). Deep bingham networks: Dealing
with uncertainty and ambiguity in pose estimation. In-
ternational Journal of Computer Vision, pages 1–28.
Feng, M., Hu, S., Ang, M. H., and Lee, G. H. (2019). 2d3d-
matchnet: Learning to match keypoints across 2d im-
age and 3d point cloud. In 2019 International Con-
ference on Robotics and Automation (ICRA), pages
4790–4796.
Fort, S., Hu, H., and Lakshminarayanan, B. (2019). Deep
ensembles: A loss landscape perspective. arXiv
preprint arXiv:1912.02757.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian
approximation: Representing model uncertainty in
deep learning. In Balcan, M. F. and Weinberger,
K. Q., editors, Proceedings of The 33rd International
Conference on Machine Learning, volume 48 of Pro-
ceedings of Machine Learning Research, pages 1050–
1059, New York, New York, USA. PMLR.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
International Conference on Computer Vision (ICCV).
Hausler, S., Garg, S., Xu, M., Milford, M., and Fischer, T.
(2021). Patch-netvlad: Multi-scale fusion of locally-
global descriptors for place recognition. In Proceed-
ings of the IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 14141–
14152.
Kendall, A. and Cipolla, R. (2016). Modelling uncertainty
in deep learning for camera relocalization. In 2016
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 4762–4769.
Kendall, A. and Cipolla, R. (2017). Geometric loss func-
tions for camera pose regression with deep learning.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Kendall, A. and Gal, Y. (2017). What uncertainties do we
need in bayesian deep learning for computer vision?
In Guyon, I., Luxburg, U. V., Bengio, S., Wallach, H.,
Fergus, R., Vishwanathan, S., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 30. Curran Associates, Inc.
Kendall, A., Gal, Y., and Cipolla, R. (2018). Multi-task
learning using uncertainty to weigh losses for scene
geometry and semantics. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet: A
convolutional network for real-time 6-dof camera re-
localization. In Proceedings of the IEEE International
Conference on Computer Vision (ICCV).
Kingma, D. P., Salimans, T., and Welling, M. (2015). Vari-
ational dropout and the local reparameterization trick.
In Cortes, C., Lawrence, N., Lee, D., Sugiyama, M.,
and Garnett, R., editors, Advances in Neural Infor-
mation Processing Systems, volume 28. Curran Asso-
ciates, Inc.
Kuleshov, V., Fenner, N., and Ermon, S. (2018). Accurate
uncertainties for deep learning using calibrated regres-
sion. In Dy, J. and Krause, A., editors, Proceedings of
the 35th International Conference on Machine Learn-
ing, volume 80 of Proceedings of Machine Learning
Research, pages 2796–2804. PMLR.
Lakshminarayanan, B., Pritzel, A., and Blundell, C. (2017).
Simple and scalable predictive uncertainty estimation
using deep ensembles. In Guyon, I., Luxburg, U. V.,
Bengio, S., Wallach, H., Fergus, R., Vishwanathan,
S., and Garnett, R., editors, Advances in Neural Infor-
mation Processing Systems, volume 30. Curran Asso-
ciates, Inc.
Liao, Y., Xie, J., and Geiger, A. (2022). KITTI-360: A
novel dataset and benchmarks for urban scene under-
standing in 2d and 3d. Pattern Analysis and Machine
Intelligence (PAMI).
McAllister, R., Gal, Y., Kendall, A., Van Der Wilk, M.,
Shah, A., Cipolla, R., and Weller, A. (2017). Con-
crete problems for autonomous vehicle safety: Ad-
vantages of bayesian deep learning. In Proceedings
of the 26th International Joint Conference on Artifi-
cial Intelligence, IJCAI’17, page 4745–4753. AAAI
Press.
Meinert, N. and Lavin, A. (2021). Multivariate deep evi-
dential regression. CoRR, abs/2104.06135.
Neubert, P., Schubert, S., and Protzel, P. (2017). Sampling-
based methods for visual navigation in 3d maps by
synthesizing depth images. In 2017 IEEE/RSJ Inter-
national Conference on Intelligent Robots and Sys-
tems (IROS), pages 2492–2498.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Wallach, H., Larochelle, H.,
Beygelzimer, A., d'Alch
´
e-Buc, F., Fox, E., and Gar-
nett, R., editors, Advances in Neural Information Pro-
cessing Systems 32, pages 8024–8035. Curran Asso-
ciates, Inc.
Peretroukhin, V., Wagstaff, B., Giamou, M., and Kelly,
J. (2019). Probabilistic regression of rotations using
quaternion averaging and a deep multi-headed net-
work. CoRR, abs/1904.03182.
Petek, K., Sirohi, K., B
¨
uscher, D., and Burgard, W. (2022).
Robust monocular localization in sparse hd maps
leveraging multi-task uncertainty estimation. In 2022
International Conference on Robotics and Automation
(ICRA), pages 4163–4169.
Uncertainty-Aware DNN for Multi-Modal Camera Localization
89

Radwan, N., Valada, A., and Burgard, W. (2018). Vloc-
net++: Deep multitask learning for semantic visual
localization and odometry. IEEE Robotics and Au-
tomation Letters, 3(4):4407–4414.
Sarlin, P.-E., Unagar, A., Larsson, M., Germain, H., Toft,
C., Larsson, V., Pollefeys, M., Lepetit, V., Ham-
marstrand, L., Kahl, F., and Sattler, T. (2021). Back to
the feature: Learning robust camera localization from
pixels to pose. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 3247–3257.
Schneider, N., Piewak, F., Stiller, C., and Franke, U. (2017).
Regnet: Multimodal sensor registration using deep
neural networks. In 2017 IEEE Intelligent Vehicles
Symposium (IV), pages 1803–1810.
Sensoy, M., Kaplan, L., and Kandemir, M. (2018). Evi-
dential deep learning to quantify classification uncer-
tainty. In Bengio, S., Wallach, H., Larochelle, H.,
Grauman, K., Cesa-Bianchi, N., and Garnett, R., edi-
tors, Advances in Neural Information Processing Sys-
tems, volume 31. Curran Associates, Inc.
Wolcott, R. W. and Eustice, R. M. (2014). Visual local-
ization within lidar maps for automated urban driving.
In 2014 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 176–183.
Yin, Z. and Shi, J. (2018). Geonet: Unsupervised learning
of dense depth, optical flow and camera pose. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Zhu, Y., Wang, J., Xie, L., and Zheng, L. (2018). Attention-
based pyramid aggregation network for visual place
recognition. In Proceedings of the 26th ACM Inter-
national Conference on Multimedia, MM ’18, page
99–107, New York, NY, USA. Association for Com-
puting Machinery.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
90
