Estimation of Overlapped Tactical Actions from Soccer Match Video
Kento Kuroda
1
, Ikuma Uchida
1
, Keisuke Fujii
2 a
and Yoshinari Kameda
3 b
1
Graduate School of Science and Technology, University of Tsukuba, Japan
2
Graduate School of Informatics, Nagoya University, Japan
3
Center for Computational Sciences, University of Tsukuba, Japan
Keywords:
Tactical Action, Soccer, Action Estimation.
Abstract:
In a soccer match, there may be overlaps of tactical actions performed at a certain point in time, because two
teams take different tactical actions and each tactical action has no clear temporal boundary. In this study, we
propose a new method for the estimation of overlapped tactical actions from soccer match videos. We enable
the estimation of overlapped tactical actions considering exclusive relationships. We achieve this by having
the deep learning model learn all tactical actions simultaneously. We validate this method using data from 10
matches. We succeeded in expressing the tactical actions performed at a given time in terms of the strength of
several tactical actions.
1 INTRODUCTION
According to Federation Internationale de Foot-
ball Association (FIFA) coaching manual, soccer is
broadly classified into offensive and defensive ac-
tions (Barnerat et al., 2000). They are further clas-
sified into several tactical actions. In soccer, tactical
actions are actions that are performed by the unifi-
cation of several players to score a goal or defend a
goal. People involved in soccer, such as the play-by-
play announcers and the coaches, can subjectively es-
timate tactical actions that are performed in a specific
match situation. If we can estimate tactical actions
for a specific match situation without having to rely
on people involved in soccer, we can treat tactical ac-
tions as objective indicators. This would make it pos-
sible to represent match situations using the strength
of each tactical action performed by the two teams.
It is expected that automatic editing of match videos,
tactical analysis with more information, and describ-
ing match situations will become possible.
Each tactical action can be expressed by the tem-
poral changes of the positional relationships among
22 players and between the ball and the players. There
may be overlaps to tactical actions performed at a cer-
tain point in time. There are two reasons for this. The
first reason is that the two teams will each have their
a
https://orcid.org/0000-0001-5487-4297
b
https://orcid.org/0000-0001-6776-1267
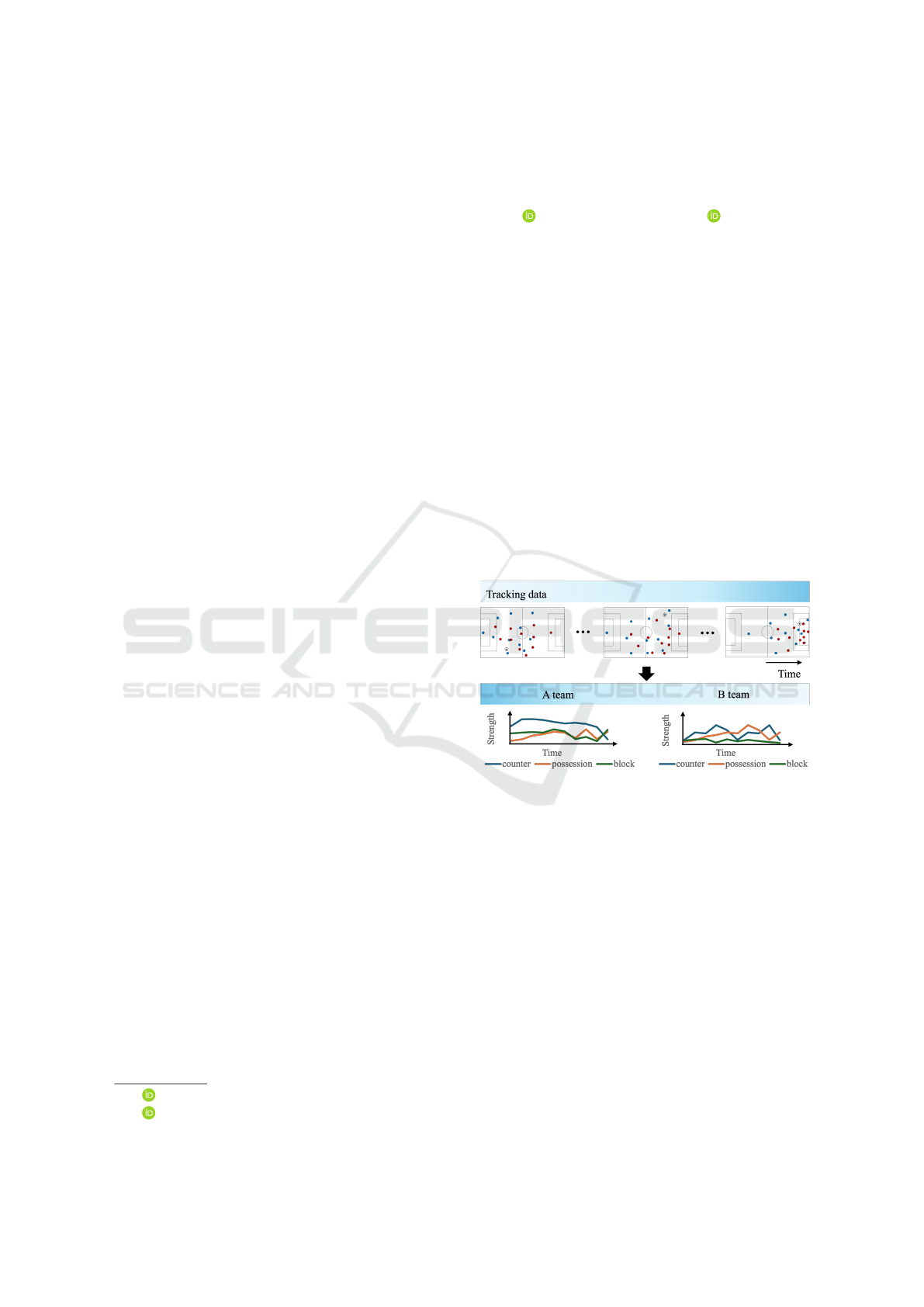
Figure 1: Overview. We estimate tactical actions of the two
teams. We use the temporal changes of the positional rela-
tionships of the ball and players in tracking data.
tactical actions. The second reason is that the tem-
poral boundaries of tactical actions performed by the
same team are unclear. In addition, overlapped tac-
tical actions have exclusive relationships. In soccer,
some tactical actions are performed simultaneously,
while some are not.
In previous studies, specific tactical actions, such
as counter-attacks, were recognized (Sigari et al.,
2015; Kobayashi et al., 2012; Fassmeyer et al., 2021;
Bauer and Anzer, 2021). In addition, match situations
were categorized into five tactical actions (Suzuki
et al., 2020). There are two problems with the pre-
vious studies. The first problem is that it does not
take into account the overlapping of tactical actions.
Therefore, the tactical actions that a team performs at
a given time are discretely represented by only one
Kuroda, K., Uchida, I., Fujii, K. and Kameda, Y.
Estimation of Overlapped Tactical Actions from Soccer Match Video.
DOI: 10.5220/0013066300003828
In Proceedings of the 12th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2024), pages 257-264
ISBN: 978-989-758-719-1; ISSN: 2184-3201
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
257

in the conventional approaches (Suzuki et al., 2020;
Wang et al., 2015). The second problem is that it is
difficult to collect a large amount of data when using
deep learning to recognize tactical actions.
We propose a new method for the estimation of
overlapped tactical actions from soccer match videos.
We enable the estimation of overlapped tactical ac-
tions considering exclusive relationships. We achieve
this by having the deep learning model learn all tac-
tical actions simultaneously. We handcraft a large
number of tactical actions based on simple defini-
tions to estimate tactical actions using deep learning.
We estimate tactical actions in deep learning by fo-
cusing on the temporal changes of the positional re-
lationships among 22 players and between the ball
and the players. We estimate eight types of tacti-
cal actions, including offensive and defensive tacti-
cal actions. The four offensive tactical actions are
long counter, short counter, opposition half posses-
sion, and own half possession. The four defensive
tactical actions are counter-press, high press, middle
press, and block. We validated the estimation of over-
lapped tactical actions considering exclusive relation-
ships by using 10 matches. We succeeded in express-
ing the tactical actions performed at a given time in
terms of the strength of several tactical actions. Fig-
ure 1 shows an overview of this study.
2 RELATED WORKS
2.1 Research on Recognition of Tactical
Actions
This study aims to estimate overlapped tactical ac-
tions. Similar to this study, there are studies that have
investigated tactical action.
There are studies that recognize only specific tac-
tical actions. First, several methods have been pro-
posed for counter-attack recognition, which is also
the estimated target of this study. Sigari et al. pro-
posed a method to recognize counter-attacks based on
camera motion (Sigari et al., 2015). Kobayashi et al.
proposed a method to recognize counter-attacks us-
ing machine learning based on the position of agents
in the RoboCup (Kobayashi et al., 2012). They pro-
posed a model to recognize counter-attacks based on
the following three characteristics: the collapse of
the opponent’s defense, the attack by a small num-
ber of players, and the movement of the ball into
the opposition half. Dennis et al. used a Varia-
tional Auto-Encoder (VAE) to extract counter-attack
features from unlabeled data. The authors extracted
the characteristics of counter-attacks from unlabeled
data using VAE (Fassmeyer et al., 2021). In addi-
tion, Bauer et al. proposed a method for recogniz-
ing and quantitatively evaluating the tactical action
of counter-press (Bauer and Anzer, 2021). Forcher
et al. proposed a quantitative evaluation method for
defensive tactical actions (Forcher et al., 2022). Al-
though there have been studies on the recognition of
various tactical actions, recognition methods have not
yet been established.
Suzuki et al. proposed a method to classify several
tactical actions of a specific match situation through
whole match (Suzuki et al., 2020). The classification
was performed using deep learning with the opinions
of experts as a teacher signal. However, it is believed
that there are match situations that cannot be repre-
sented because they did not recognize tactical actions
in overlapping. They considered exclusive relation-
ships between the tactical actions performed by the
two teams. They corrected the recognition results to
account for exclusive relationships. Since we focus
on estimating tactical actions in overlapping, we use a
method that takes exclusive relationships into account
when training the deep learning models.
2.2 Research Using the Temporal
Changes of the Ball and Players
Position
With the development and spread of tracking devices,
tracking data has become readily available. This has
led to research using the temporal changes of the ball
and players’ positions.
First, the temporal changes of the ball and players’
position are used to analyze match situations. Lucey
et al. examined a method for quantifying the possibil-
ity of chances by considering defensive positions and
formations obtained from tracking data (Lucey et al.,
2015). Kamiya et al. estimated the changes in match
situations based on variables such as the ball position,
front line position, and compactness (Kamiya et al.,
2017).
In addition, indicators of team characteristics have
been generated using tracking data. Lucey et al. pro-
posed a method for capturing team characteristics
and identifying teams from tracking data alone us-
ing multi-agent plan recognition (Lucey et al., 2012).
Bialkowski et al. proposed a method for analyzing
roles within a team by assigning each player soccer
position (Bialkowski et al., 2014).
In this study, we also use the positions of the ball
and players obtained from the broadcast videos for the
estimation of tactical actions.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
258

3 ESTIMATION OF
OVERLAPPED TACTICAL
ACTIONS
In this section, we describe a method for estimating
overlapped tactical actions. We describe the details of
the tactical actions we estimate in Section 3.1. We de-
scribe the estimation of each tactical action in Section
3.2. We describe the estimation of overlapped tactical
actions in Section 3.3.
3.1 Description of Tactical Actions
This section describes tactical actions. There are eight
types of tactical actions that we estimate. Four types
of offensive tactical actions are long counter (lc),
short counter (sc), opposition half possession (opp),
and own half possession (own). Four types of defen-
sive tactical actions are counter-press (cp), high press
(hp), middle press (mp), and block (bl). FIFA states
that there are 7 phases of play when the ball is in pos-
session, attacking, and 9 phases of play when the ball
is not in possession, defending (FIFA Training Cen-
tre, 2022). Among the 16 phases of play, 8 represen-
tative ones were selected as the tactical actions to be
estimated.
The overlapped tactical actions have exclusive re-
lationships. There are two types of exclusive rela-
tionships. First, there are tactical actions that can-
not be performed by the two teams at the same time.
Second, there are tactical actions that cannot be per-
formed by the same team at the same time. In soccer,
two teams play with one ball. It is impossible for the
two teams to simultaneously perform a tactical action
when it is in ball possession. It is also impossible
for the same team to perform a tactical action when
it is in ball possession and a tactical action when it is
not in ball possession at the same time. In this study,
the six tactical actions, excluding counter-attacks, are
the tactical actions that cannot be performed by the
two teams at the same time, as shown in the Table 1.
Counter-attacks can overlap the execution times of the
two teams. Long and short counters are tactical ac-
tions that cannot be performed by the same team at
the same time, as shown in the Table 2. Other than
the combination of long and short counters, the exe-
cution times of the two tactical actions can overlap in
the transition.
3.2 Estimation of Each Tactical Action
In this section, we describe the estimation method for
each tactical action. First, we organize the state vari-
ables used in this study. We describe the position of
Table 1: Tactical actions that can be performed simultane-
ously by the two teams. Y represents tactical actions that
can be performed by two teams simultaneously; N repre-
sents tactical actions that cannot be performed by two teams
simultaneously.
A Team
lc sc opp own cp hp mp bl
B Team
lc Y Y Y Y Y Y Y Y
sc Y Y Y Y Y Y Y Y
opp Y Y N Y Y Y Y Y
own Y Y Y N Y Y Y Y
cp Y Y Y Y N Y Y Y
hp Y Y Y Y Y N Y Y
mp Y Y Y Y Y Y N Y
bl Y Y Y Y Y Y Y N
Table 2: Tactical actions that can be performed simultane-
ously by the same team. Y represents tactical actions that a
team can perform simultaneously; N represents tactical ac-
tions that a team cannot perform simultaneously.
X Team
lc sc opp own cp hp mp bl
X Team
lc N Y Y Y Y Y Y
sc N Y Y Y Y Y Y
opp Y Y Y Y Y Y Y
own Y Y Y Y Y Y Y
cp Y Y Y Y Y Y Y
hp Y Y Y Y Y Y Y
mp Y Y Y Y Y Y Y
bl Y Y Y Y Y Y Y
the ball and players and the sequence consisting of
them. Next, we describe the teacher signal given to
the sequence.
The state variables used in this study are the posi-
tions of the ball and players on the field. The position
of the ball is given in three-dimensional coordinates
as shown in Fig. 2. The state variable is represented
by the following equation. The position of the player
is given by xy two-dimensional coordinates in Fig. 2.
O
O
O = (O
x
, O
y
, O
z
)
⊤
(1)
A
A
A[n] = (A[n]
x
, A[n]
y
)
⊤
(2)
B
B
B[n] = (B[n]
x
, B[n]
y
)
⊤
(3)
P
P
P = {O
O
O, A
A
A[0], . . . , A
A
A[10], B
B
B[0], . . . , B
B
B[10]} (4)
G
G
G = {P
P
P
0
, . . . , P
P
P
t
, . . . , P
P
P
T
}
⊤
0 ≤ t ≤ T (5)
X
X
X
t
= {P
P
P
t−l
, . . . , P
P
P
t
}
⊤
(6)
The position of the ball at a given time is repre-
sented by Eq. (1). The position of the n-th player of
A team is represented by Eq. (2). The position of the
n-th player of B team is represented by Eq. (3). As
Estimation of Overlapped Tactical Actions from Soccer Match Video
259

Figure 2: Direction of the 3D coordinates of the field.
Figure 3: Sorting the positions of the ball and players in the
tracking data by ball, A team keeper to forward, and B team
keeper to forward.
in Eq. (4), P
P
P contains the positions of the ball, the
players of A team, and the players of B team, in that
order. The positions of the players of each team are
stored in the order of keeper, defender, midfielder, and
forward, as shown in Fig. 3. The position P
P
P at time t
is denoted as P
P
P
t
. A match can be represented by the
Eq. (5) using P
P
P
t
. To represent a specific match situ-
ation, a match is divided into sequences consisting of
position at each time and past time. We denote by l
the length of past time included in the sequence. The
sequence X
X
X
t
at a given time t can be expressed by Eq.
(6).
Next, we describe the teacher signal. To train a
deep learning model, it is necessary to provide the
teacher signal Y
Y
Y
t
along with the sequence X
X
X
t
con-
taining the positions of the ball and players. The
teacher signal for a specific tactical action is denoted
as Y [tacaction]
t
. The teacher signal indicates whether
the tactical action is being performed at time t. We as-
sign a value of 1 to the teacher signal Y [tac action]
t
when the tactical action is being performed and 0
when it is not. This is expressed by Eq. (7). We
recognize tactical actions with simple definitions. We
denote the start time of a tactical action as start, the
end time as end, and the focus time as t. If the focus
time t is between the start time start and the end time
end, the tactical action is considered to be ongoing at
time t.
Y [tac action]
t
=
0 (t < start, end < t)
1 (start ≤ t ≤ end)
(7)
Figure 4: Teacher signal. We have the deep learning model
to learn all tactical actions simultaneously.
3.3 Estimation of Overlapped Tactical
Actions Considering Exclusive
Relationships
We discuss the method to estimate overlapped tactical
actions considering exclusive relationships. We have
the deep learning model to learn all tactical actions
simultaneously, as shown in Fig. 4. This allows for
the estimation of overlapped tactical actions. When
we train the deep learning model, we make the teacher
signals of the tactical actions exclusive, which cannot
be performed at the same time. This allows for the
estimation considering exclusive relationships. The
tactical actions that cannot be performed at the same
time are based on Table 1 and 2.
4 IMPLEMENTATION
In this section, we describe how to implement the pro-
posed method in Section 3. We describe the data used
in this study in Section 4.1. We describe how to divide
the data into sequences in Section 4.2. We describe
the teacher signals for each sequence in Section 4.3.
We describe the processes of training the model and
the estimation in Section 4.4.
4.1 Data Format
In this study, two sets of data are used. The first is
tracking data provided by SkillCorner. The second is
event data provided by StatsBomb. We describe the
tracking data. The three-dimensional coordinates of
the ball and 22 players on the field are obtained at
10 fps. SkillCorner detects the ball and the players
from the broadcast video and estimates their positions
on the field. The positions of players not captured in
the broadcast video are predicted using deep learning.
Next, we describe the event data. Event data contains
events such as passes, drives, shots, and goals, along
with the time of occurrence and the position of the
ball at that time. It also includes information such as
whether the ball carrier was under pressure for each
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
260
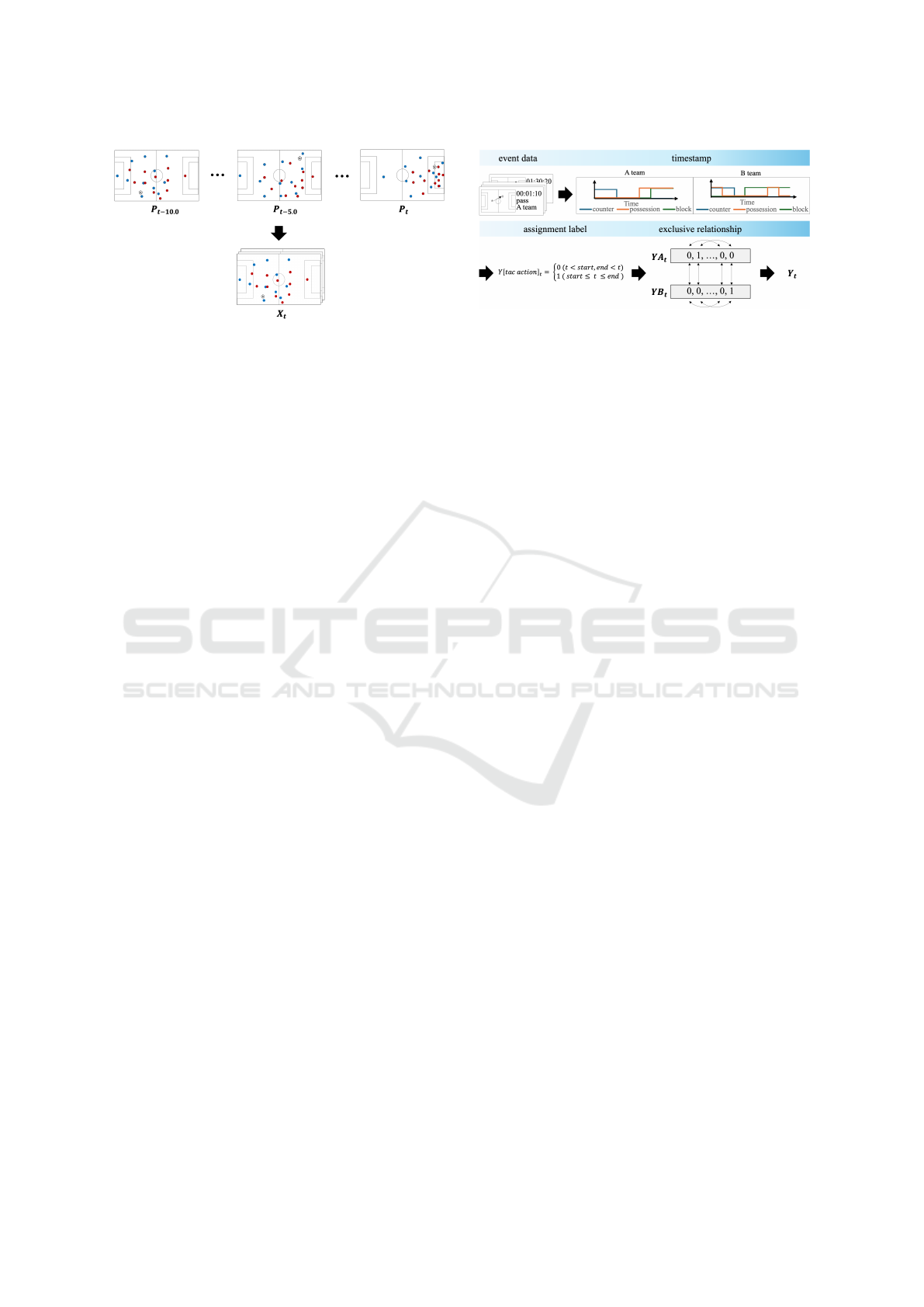
Figure 5: Sequence segmentation.
event. This information can be used to provide the
teacher signals for tactical actions.
4.2 Sequence Segmentation
We describe the method for sequence segmentation.
As shown in Eq. (6), the data is divided into se-
quences. The length of past time l is set to l = 10.0.
As shown in Fig. 5, the sequence X
X
X
t
at focus time t
includes the position data from t − 10.0 to t. Since
the fps is 10, the sequence contains 100 frames. The
focus time t is slid 0.1 seconds at a time for segmenta-
tion. This allows the estimation results for each frame
to be outputted.
Each frame contains a three-dimensional coordi-
nate indicating the ball position, two-dimensional co-
ordinates indicating the positions of 11 players from
A team, and two-dimensional coordinates indicating
the positions of 11 players from B team, as described
by Eq. (4) and shown in Fig. 3. The players of
each team are arranged in the order of goalkeeper, de-
fender, midfielder, and forward. There is no specific
rule regarding the order of players within the same po-
sition. Additionally, in Fig. 2, A team is set to attack
in the positive direction, while B team is set to attack
in the negative direction.
4.3 Acquiring Teacher Signals
We describe the method for obtaining the teacher sig-
nal. We handcraft a large number of tactical actions
based on simple definitions. As shown in Fig. 6, the
start and end times of each team’s eight types of tac-
tical actions are recognized from the event data using
simple definitions. Next, the teacher signal at focus
time t is obtained based on the start and end times of
each tactical action. Finally, we reflect exclusive rela-
tionships of the tactical actions in the teacher signal.
First, we describe the recognition of tactical ac-
tions using simple definitions. We adapt the defini-
tions of team style indicators published by the anal-
ysis company DataStadium. The definitions of each
Figure 6: Assignment a teacher signal. We recognize start
and end times of each tactical action from event data. We
assign a teacher signal for the tactical action based on the
start and end times.
tactical action are shown in Table 3. We have modi-
fied some of the definitions to simplify the recognition
from event data. Based on these definitions, the start
and end times of each tactical action are recognized
from the event data through whole matches.
Next, we provide the teacher signal Y
Y
Y
t
for each
sequence X
X
X
t
. The teacher signal for A team’s tactical
actions is denoted as Y
Y
Y A
A
A
t
. The teacher signal for B
team’s tactical actions is denoted as Y
Y
Y B
B
B
t
. Since there
are eight types of tactical actions, the teacher signal
for one team consists of 8 values, as shown in Eqs.
(8) and (9). To estimate the tactical actions of both
teams simultaneously, the teacher signal Y
Y
Y
t
is struc-
tured as shown in Eq. (10). As explained in Section
3.2, the teacher signal is either 0 or 1, as expressed
by Eq. (7). The start and end are the start and end
times recognized from the event data, and t refers to
the focus time.
Finally, to consider exclusive relationships of tac-
tical actions, we make the teacher signals of the tac-
tical actions exclusive, which cannot be performed at
the same time.
Y
Y
Y A
A
A
t
= (YA[lc]
t
,YA[sc]
t
,YA[opp]
t
,YA[own]
t
,
YA[cp]
t
,YA[hp]
t
,YA[mp]
t
,YA[bl]
t
)
(8)
Y
Y
Y B
B
B
t
= (Y B[lc]
t
,Y B[sc]
t
,Y B[opp]
t
,Y B[own]
t
,
Y B[cp]
t
,Y B[hp]
t
,Y B[mp]
t
,Y B[bl]
t
)
(9)
Y
Y
Y
t
= (Y
Y
Y A
A
A
t
, Y
Y
Y B
B
B
t
) (10)
4.4 Training Model and Estimation
First, we describe the deep learning model used.
Next, we describe the processes of training the model
and the estimation.
The deep learning model used in this study is
Long Short-Term Memory (LSTM). We use LSTM
because it excels in supervised learning of time series
data.
Estimation of Overlapped Tactical Actions from Soccer Match Video
261
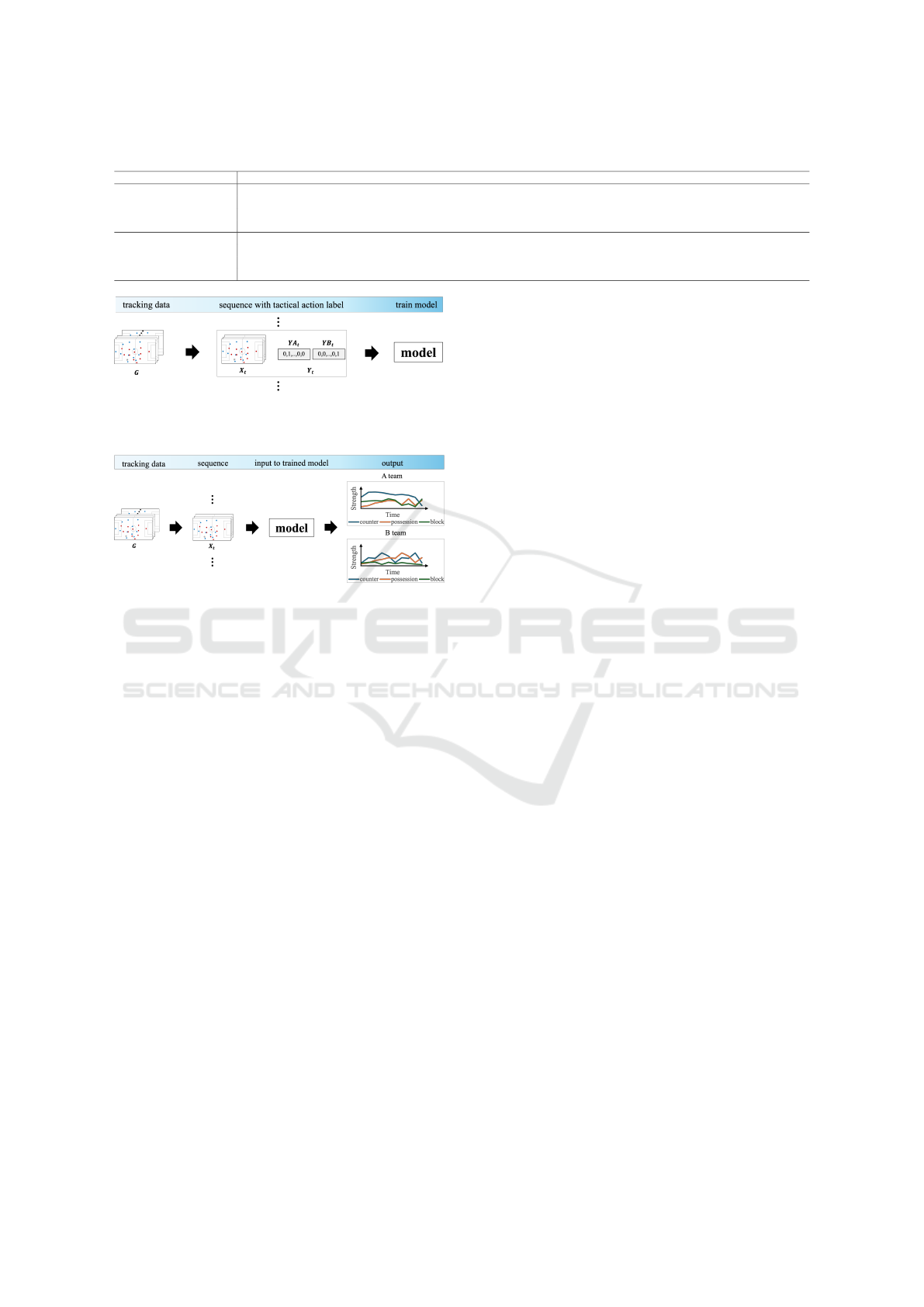
Table 3: Definition of tactical actions.
Tactical Action Definition
long counter Attacks that penetrate into the attacking third within 15 seconds after winning the ball in the defensive third
short counter Attacks that penetrate into the attacking third within 10 seconds after winning the ball in the middle third or behind the attacking third
opposition half possession Attacks with the ball possession for more than 20 seconds in opposition half
own half possession Attacks with the ball possession for more than 20 seconds in own half
counter-press Defenses that presses an opponent’s ball carrier less than 5 seconds after the ball lost.
high press Defenses that presses continuously against the play of the opponent’s keeper or defenders
middle press Defenses that presses continuously against the play of an opponent’s midfielders or forwards
block Defenses that do not press in own half when the opponent do the ball possession
Figure 7: The process of training. We input sequences and
teacher signals into a deep learning model.
Figure 8: The process of estimation. We input a sequence
into a trained model. The trained model outputs a estima-
tion result for each tactical action of the two teams.
As shown in Fig. 7, the combinations of sequence
X
X
X
t
and teacher signal Y
Y
Y
t
are input for training the
LSTM model. Next, as shown in Fig. 8, when a se-
quence X
X
X
k
is input to the trained LSTM model, the
estimation result Z
Z
Z
k
is output. The estimation results
in Z
Z
Z
k
, similar to the teacher signal, consists of eight
values for each team, as shown in Eqs. (11) and (12).
The estimation result Z
Z
Z
k
is composed of the estima-
tion results of both teams as shown in Eq. (13). In
certain tactical actions, the closer the estimation re-
sult is to 1, the higher the likelihood that the tactical
action is being performed.
Z
Z
ZA
A
A
k
= (ZA[lc]
k
, ZA[sc]
k
, ZA[opp]
k
, ZA[own]
k
,
ZA[cp]
k
, ZA[hp]
k
, ZA[mp]
k
, ZA[bl]
k
)
(11)
Z
Z
ZB
B
B
k
= (ZB[lc]
k
, ZB[sc]
k
, ZB[opp]
k
, ZB[own]
k
,
ZB[cp]
k
, ZB[hp]
k
, ZB[mp]
k
, ZB[bl]
k
)
(12)
Z
Z
Z
t
= (Z
Z
ZA
A
A
t
, Z
Z
ZB
B
B
t
) (13)
5 EXPERIMENT
In this section, we describe the estimation results of
tactical actions using a trained model. First, we de-
scribe the dataset used for the experiments in Sec-
tion 5.1. In Section 5.2, we present the estimation
results for a particular scene. Finally, in Section 5.3,
we describe the estimation results of tactical actions
through whole matches as an ablation study.
5.1 Experimental Dataset
We describe the dataset used in this experiment. We
use both a training dataset and a test dataset. First, we
describe the training dataset. For the training dataset,
we use tracking data from SkillCorner and event data
from StatsBomb for 40 matches. All 40 matches are
from the La Liga 2023-2024 season. From these 40
matches, we prepare 2500 sequences for each team’s
tactical actions, except for counter-pressing, which
has 2000 sequences. A total of 39,000 sequences and
their corresponding teacher signals are used to train
the LSTM model. Next, we describe the test dataset.
We prepare a test dataset of 10 matches, all from the
La Liga 2023-2024 season, but not included in the
training dataset. After training the LSTM model with
the training dataset, we input the test dataset into the
trained LSTM model to verify the estimation results.
Finally, we describe a particular scene that we evalu-
ate qualitatively. We use the scene with overlapped
tactical actions. The scene is a one-minute period
from 43:30 to 44:30 in the second half of the Real
Madrid vs. Barcelona match. The scene is illustrated
using images that reflect the positions of the ball and
the players on the field of the CG environment based
on the tracking data, as shown in Figure 9. In this
scene, the players are switching between offense and
defense, and overlapped tactical actions are occurring
in between.
5.2 Estimation Results of Overlapped
Tactical Actions
In this section, we describe the estimation results of
the situation with overlapped tactical actions using
the trained LSTM model. From this experiment, we
confirmed that the trained model can estimate over-
lapped tactical actions considering exclusive relation-
ships. As the results show, we succeeded in express-
ing the tactical actions performed at a given time in
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
262
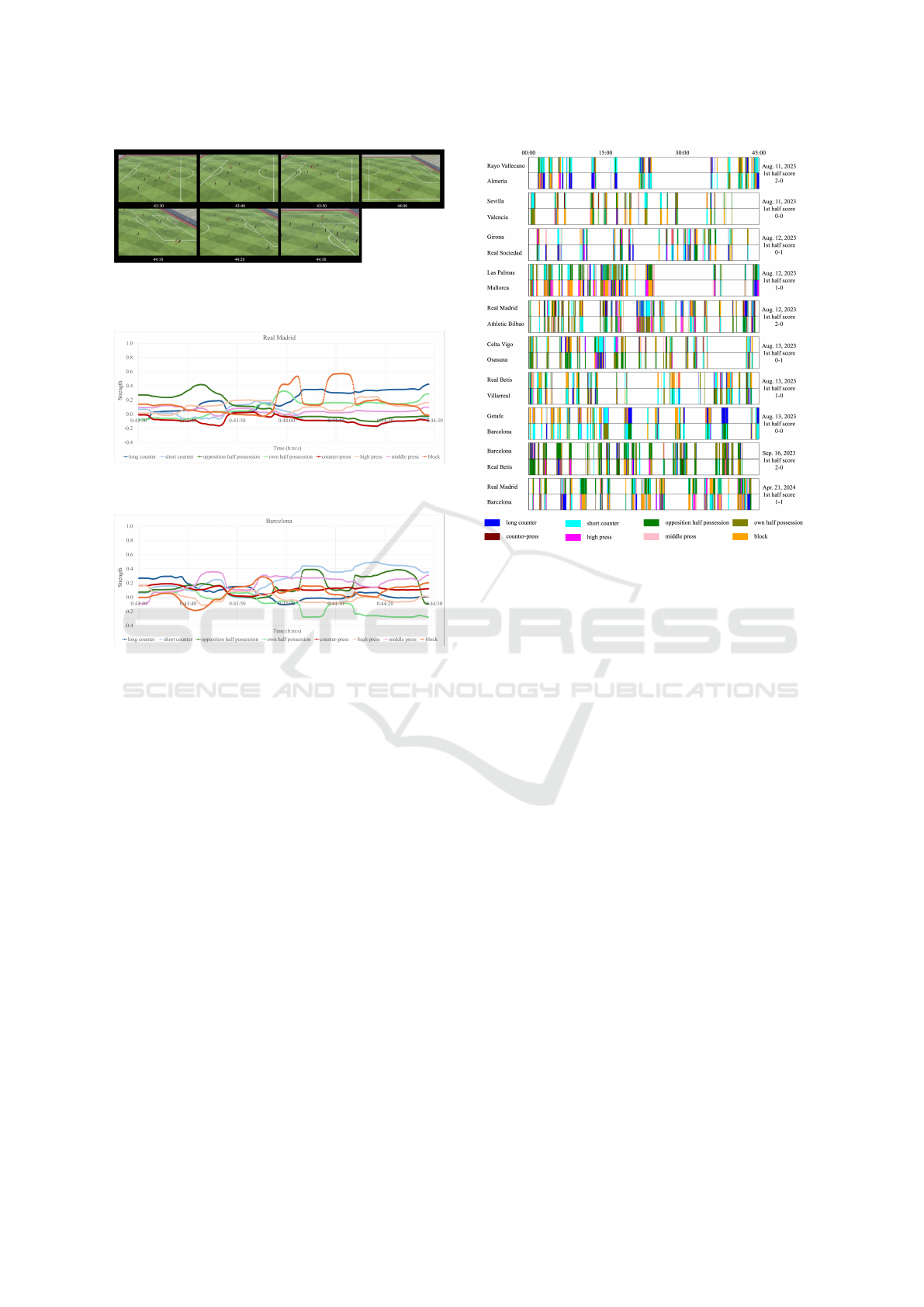
Figure 9: The scene with overlapped tactical actions. The
scene is a one-minute period from 43:30 to 44:30 in the
second half of the Real Madrid vs. Barcelona match
Figure 10: Estimation results of tactical actions of Real
Madrid.
Figure 11: Estimation results of tactical actions of
Barcelona.
terms of the strength of several tactical actions. Cur-
rently, the dataset we handcrafted does not represent
the strength of tactical actions as time-varying. To
verify the performance for continuous estimation, we
need to expand the dataset for this purpose in the fu-
ture.
Figure 10 shows the estimation results for Real
Madrid’s tactical actions. Figure 11 shows the esti-
mation results for Barcelona’s tactical actions. The
trained model estimated that Real Madrid was attack-
ing with opposition half possession from 43:30 to
43:50. At the same time, it estimated a high pos-
sibility that Barcelona was performing long counter
and middle press. The estimation results changed as
the attack and defense roles reversed at around 43:50.
The model estimated a high possibility that Real
Madrid was performing block and long counter while
Barcelona was performing short counter and oppo-
sition half possession. In the actual match, around
44:30, Real Madrid regained the ball and attempted
a counter-attack, but it was stopped by a foul. The
trained model estimated this as a long counter. The
model did not estimate the likely to be performed two
tactical actions that cannot be performed at the same
Figure 12: Estimation results for the first 45 minutes of the
10 games. This graph shows the tactical actions estimated
as most likely to be performed by each team at each time.
time based on Table 1 and 2. We believe that the esti-
mation of overlapped tactical actions considering ex-
clusive relationships was achieved.
5.3 Ablation Study
In this section, we describe the estimation results of
tactical actions through whole matches using a test
dataset of 10 matches. From this experiment, we con-
firmed the validity of the estimation results. Addition-
ally, we demonstrated the potential to represent match
situations through the tactical actions performed by
the two teams. Figure 12 shows the tactical actions
that were estimated as most likely to be performed by
each team at each time. We present the estimation
results for the first 45 minutes of each match. Tac-
tical actions are estimated only in situations where
play continues for more than 10 seconds, as each se-
quence requires 10 seconds of position data. Look-
ing at Fig. 12 as a whole, the team with the superior
score often performs offensive tactical actions most
of the time. Conversely, inferior teams often perform
defensive tactical actions most of the time. By com-
paring the last three matches, we can confirm the cor-
relation between estimation results and the objective
match content using Barcelona as an example. In the
match against Real Betis, Barcelona had an advantage
in terms of score. The estimation results show a domi-
Estimation of Overlapped Tactical Actions from Soccer Match Video
263

nance of possession attacks. In the match against Real
Madrid, the team performed defensive tactical actions
most of the time, indicating a struggle against a strong
opponent. In the match against Getafe, although of-
fensive tactical actions were predominant, the score
was 0-0. The estimation results predict that Barcelona
struggled to convert their attacks into goals. In fact,
Barcelona’s expected goals (xG) in this match were
significantly higher than Getafe’s, but they failed to
score. From these observations, we confirmed that
the estimation results align with the objective match
content. Furthermore, by representing match situa-
tions using the combination of tactical actions of the
two teams, we demonstrated the potential to predict
match situations.
6 CONCLUSION
In this study, we propose a new method for estimating
overlapped tactical actions from soccer match videos.
We enable the estimation of overlapped tactical ac-
tions considering exclusive relationships. We achieve
this by having the deep learning model learn all tacti-
cal actions simultaneously. We handcraft a large num-
ber of tactical actions based on simple definitions to
estimate tactical actions using deep learning. We esti-
mate tactical actions in deep learning by focusing on
the temporal changes of the positional relationships
among 22 players and between the ball and the play-
ers.
We validated the estimation of overlapped tactical
actions considering exclusive relationships by using
10 matches. We succeeded in expressing the tacti-
cal actions performed at a given time in terms of the
strength of several tactical actions. In the ablation
study, we confirmed the validity of the estimation re-
sults.
ACKNOWLEDGEMENTS
Part of this research is supported by JSPS KAKENHI
Grand Number 21H03476 and 21H05300.
REFERENCES
Barnerat, T., Crevoisier, J., Hoek, F., Redon, P., and
Ritschard, M. (2000). FIFA Coaching. Druckerei
Feldegg AG.
Bauer, P. and Anzer, G. (2021). Data-driven detection of
counterpressing in professional football: A supervised
machine learning task based on synchronized posi-
tional and event data with expert-based feature extrac-
tion. Data Mining and Knowledge Discovery, 35.
Bialkowski, A., Lucey, P., Carr, P., Yue, Y., Sridharan, S.,
and Matthews, I. (2014). Large-scale analysis of soc-
cer matches using spatiotemporal tracking data. In
2014 IEEE International Conference on Data Mining,
pages 725–730.
Fassmeyer, D., Anzer, G., Bauer, P., and Brefeld, U. (2021).
Toward automatically labeling situations in soccer.
Frontiers in Sports and Active Living, 3.
FIFA Training Centre (2022). EFI Explanation
Documents (PDF) — fifatrainingcentre.com.
https://www.fifatrainingcentre.com/en/fwc2022/
efi-metrics/efi-metrics-pdfs.php. [accessed on 13th
July 2024].
Forcher, L., Altmann, S., Forcher, L., Jekauc, D., and
Kempe, M. (2022). The use of player tracking data to
analyze defensive play in professional soccer - a scop-
ing review. International journal of Sports Science &
Coaching, 17:174795412210757.
Kamiya, K., Nakanishi, W., and Izumi, Y. (2017). Track-
ing data to extract changes in football game situation.
Proceedings of the Institute of Statistical Mathemat-
ics, 65.
Kobayashi, Y., Kawamura, H., and Suzuki, K. (2012).
Counter attack detection with machine learning from
log files of robocup simulation. In The 6th Interna-
tional Conference on Soft Computing and Intelligent
Systems, and The 13th International Symposium on
Advanced Intelligence Systems, pages 1821–1826.
Lucey, P., Bialkowski, A., Carr, P., Foote, E., and Matthews,
I. (2012). Characterizing multi-agent team behavior
from partial team tracings: Evidence from the english
premier league. In The AAAI Conference on Artificial
Intelligence, pages 1387–1393.
Lucey, P., Bialkowski, A., Monfort, M., Carr, P., and
Matthews, I. (2015). ”quality vs quantity”: Improved
shot prediction in soccer using strategic features from
spatiotemporal data. In The 8th Annual MIT Sloan
Sports Analytics Conference, pages 1–9.
Sigari, M.-H., Soltanian-Zadeh, H., Kiani, V., and Pour-
reza, A.-R. (2015). Counterattack detection in broad-
cast soccer videos using camera motion estimation. In
2015 The International Symposium on Artificial Intel-
ligence and Signal Processing (AISP), pages 101–106.
Suzuki, G., Takahashi, S., Ogawa, T., and Haseyama, M.
(2020). An estimation method of candidate region
for superimposing information based on gaze track-
ing data in soccer videos. In 2020 IEEE Interna-
tional Conference on Consumer Electronics - Taiwan
(ICCE-Taiwan), pages 1–2.
Wang, Q., Zhu, H., Hu, W., Shen, Z., and Yao, Y. (2015).
Discerning tactical patterns for professional soccer
teams: an enhanced topic model with applications. In
The 21th ACM SIGKDD International Conference on
Knowledge Discovery and Data Mining, pages 2197–
2206.
icSPORTS 2024 - 12th International Conference on Sport Sciences Research and Technology Support
264
