
Control of Fixed-Wing Tethered Aircraft in Circular Take-Off and
Landing Maneuvers
S
´
ergio Vinha
a
, Gabriel M. Fernandes
b
, Manuel C. R. M. Fernandes
c
,
Huu Thien Nguyen
d
and Fernando A. C. C. Fontes
e
SYSTEC-ISR-ARISE, Department of Electrical and Computer Engineering,
Faculty of Engineering, University of Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal
Keywords:
Airplane Control, Tethered Aircraft, Automatic Take-off and Landing, Circular Take-off and Landing,
Unmanned Aerial Vehicles (UAVs), Airborne Wind Energy.
Abstract:
This article addresses the control of tethered aircraft with fixed wings during take-off and landing maneuvers
with a circular motion, particularly focusing on controlling the aircraft’s roll attitude. The tether forces acting
on the aircraft make the roll control, in some operating regions, particularly challenging or even impossible
when just ailerons are used. We describe a novel bridle system to actuate on the roll angle, the development
of a controller for such a device, and its integration in the overall take-off and landing control architecture.
Simulation results are reported, showing the adequacy of the approach. Further analysis identifies operational
regions where it is possible to have a tethered flight or a coordinated turn flight as a function of the tether
length and of the aircraft’s height.
1 INTRODUCTION
In the last few years, we have been witnessing a rapid
increase in tethered aircraft applications and in the
literature on this subject. A recent survey (Marques
et al., 2023) identified a broad range of applications,
namely inspection/monitoring, security/surveillance,
military, agricultural spraying, communications, ve-
hicle towing and the generation of electrical power.
The latter application, known as Airborne Wind En-
ergy (AWE), has seen a particularly active research
(Schmehl, 2018; Directorate-General for Research
and Innovation (European Commission) and Ecorys,
2018).
Airborne Wind Energy Systems (AWES) are
mechanisms that convert wind energy into electricity
using autonomous aircraft attached to the ground by
a tether. These mechanisms can harvest wind energy
at high altitudes, where the wind is stronger and less
intermittent, being able to generate electricity from
a yet unexplored renewable energy resource. This
a
https://orcid.org/0000-0002-6364-6736
b
https://orcid.org/0009-0005-6321-8677
c
https://orcid.org/0000-0003-2322-8182
d
https://orcid.org/0000-0002-2266-9560
e
https://orcid.org/0000-0003-3516-5094
makes AWE a promising renewable energy player.
However, developing AWES into a competitive and
commercially viable renewable energy technology is
challenging. One of the main challenges is the abil-
ity to operate safely, reliably, and autonomously for
long periods of time in various weather and environ-
mental conditions (see e.g., the European Commis-
sion report (Directorate-General for Research and In-
novation (European Commission) and Ecorys, 2018)
and a study for Airborne Wind Europe (Blanch et al.,
2022)). Despite the progress made in this field, most
existing technology demonstrators still require super-
vised operation, particularly in the take-off and land-
ing phases, and thus, are not fully autonomous. To
achieve full autonomous operation it is essential to de-
velop reliable automatic Take-Off and Landing (TOL)
schemes for tethered aircraft.
The control of tethered aircraft, in particular for
AWE, is a demanding problem, but one for which
a significant number of contributions has been pro-
duced (see e.g.(Vermillion et al., 2021) and the many
references therein). Different Automatic Take-Off
and Landing (ATOL) approaches for tethered aircraft
have been tried (Fagiano and Schnez, 2017). Among
those, we can distinguish three techniques for fixed-
wing aircraft: linear, vertical and circular TOL tech-
niques. In vertical TOL, the technology is vastly stud-
Vinha, S., Fernandes, G. M., Fernandes, M. C. R. M., Nguyen, H. T. and Fontes, F. A. C. C.
Control of Fixed-Wing Tethered Aircraft in Circular Take-Off and Landing Maneuvers.
DOI: 10.5220/0013067000003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 2, pages 319-326
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
319

ied in the multicopter area. The same happens in the
linear TOL with the common airplanes. However, cir-
cular TOL has a much lower possibility of reusing
existing similar technology and thus is the least in-
vestigated technique of the three. The Circular Take-
off and Landing (CTOL) is the technique studied in
this article and it has several advantages: the facil-
ity to re-launch due to the infinite runway (the air-
craft can do as many turns as needed) and the low
peak power and additional mass required for climb-
ing (Vinha et al., 2024a). There are two variants of
the CTOL technique. One of such variants, the most
investigated one, uses a rotating platform or rigid arm
to generate enough airspeed (Sieberling et al., 2011;
Zanon et al., 2013; Geebelen et al., 2013; Rieck et al.,
2017). Other variants use a tethered aircraft equipped
with landing gear and propellers to produce the cir-
cular motion during the take-off and landing phases,
similarly to the scheme studied here and in (Cherubini
et al., 2017; Cherubini, 2017; Fernandes, 2023; Vinha
et al., 2024b). It is also noteworthy that Miles Loyd,
a pioneer of Airborne Wind Energy, describes in its
seminal patent (Loyd, 1981) a mechanism based on a
circular launch system.
A control system for automatic circular take-off
and landing and transition to flight has been pro-
posed, which can be adopted by a fixed-wing, self-
motorized, tethered aircraft. The main application
foreseen for the proposed technology is to include it
in an Airborne Wind Energy System. It used a hierar-
chical control architecture. In the top layer, a supervi-
sory controller is responsible for governing the transi-
tion between flight phases, for path-planning, and for
setting the references to the lower-level controllers at
each phase of operation. At the lower level, the con-
trollers that were designed for each phase range from
simple PID, controlling on a single variable, to multi-
variable optimal regulators for the locally linearized
systems. This control architecture was detailed in
(Vinha et al., 2024b) and is summarized here for com-
pleteness.
In this paper, we introduce a novel bridle actuator
to control the angle between the wings and the tether
and thereby control the roll angle of the tethered air-
craft. We also develop a dynamic model and control
system for the aircraft’s roll angle, integrated into the
overall control architecture.
The control of the roll angle in tethered aircraft
can be demanding in some situations due to the ten-
dency of the tether tension to impose a specific wings-
tether angle. The take-off, landing, and transition to
normal tethered flight are some of such demanding
situations for which it is crucial to have a roll angle
control authority. Here, we explore in the examples
the roll control during the phase immediately after the
take-off, in loiter with levelled wings, and in coordi-
nated turn situations. The developed controllers have
been tested in simulations. The results show the vi-
ability of the approach to take-off and transition to
other tethered flight modes. In the analysis of the re-
sults, we identify viable operational regions accord-
ing to tether length and height for different roll angle
intervals.
The document is organized as follows. In Section
2, we derive the model used to represent the motion of
a tethered aircraft and introduce the control architec-
ture used. Next, in Section 3 we detail the parameters
and results from simulations designed to test the pro-
posed control system. Finally, in Section 4, we dis-
cuss the results and implications of the simulations,
including a discussion of the conditions in which co-
ordinated turn flight is possible.
2 TETHERED AIRCRAFT
MODEL
The motion of a tethered aircraft, when the tether is
taut, is constrained to the surface of a sphere with
a radius equal to the tether length. Therefore, it is
convenient to use spherical coordinates centred at the
tether anchorage point. The aircraft’s location is rep-
resented by (r,ϕ,β), where r is the radial distance, ϕ
is the azimuth angle, and β the elevation angle (mea-
sured from the horizontal plane). The coordinate ba-
sis is denoted by (e
r
,e
ϕ
,e
β
). See nomenclature in Ta-
ble 1. In spherical coordinates, the position, velocity,
and acceleration vectors are (Riley et al., 2006):
p =
r
ϕ
β
,
˙
p =
˙r
r cos β
˙
ϕ
r
˙
β
, and (1)
¨
p =
¨r
r cos β
¨
ϕ
r
¨
β
+
−r
˙
β
2
− r
˙
ϕ
2
cos
2
β
2˙r
˙
ϕcos β − 2r
˙
ϕ
˙
βsin β
2˙r
˙
β + r
˙
ϕ
2
cosβ sin β
. (2)
The aircraft’s velocity vector is also denoted by V
(V =
˙
p) and the airspeed vector is given by V
a
=
V − V
w
where V
w
is the wind speed vector (assumed
zero in this work). The last term in
¨
p is due to the use
of a rotating frame and is equal to −F
i
/m, where F
i
represents the inertial force,
F
i
= m
r
˙
β
2
+ r
˙
ϕ
2
cos
2
β
−2˙r
˙
ϕcos β + 2r
˙
ϕ
˙
βsin β
−2˙r
˙
β − r
˙
ϕ
2
cosβ sin β
. (3)
It is also convenient to consider the body coordi-
nate frame with basis (e
X
,e
Y
,e
Z
), where e
X
is the air-
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
320
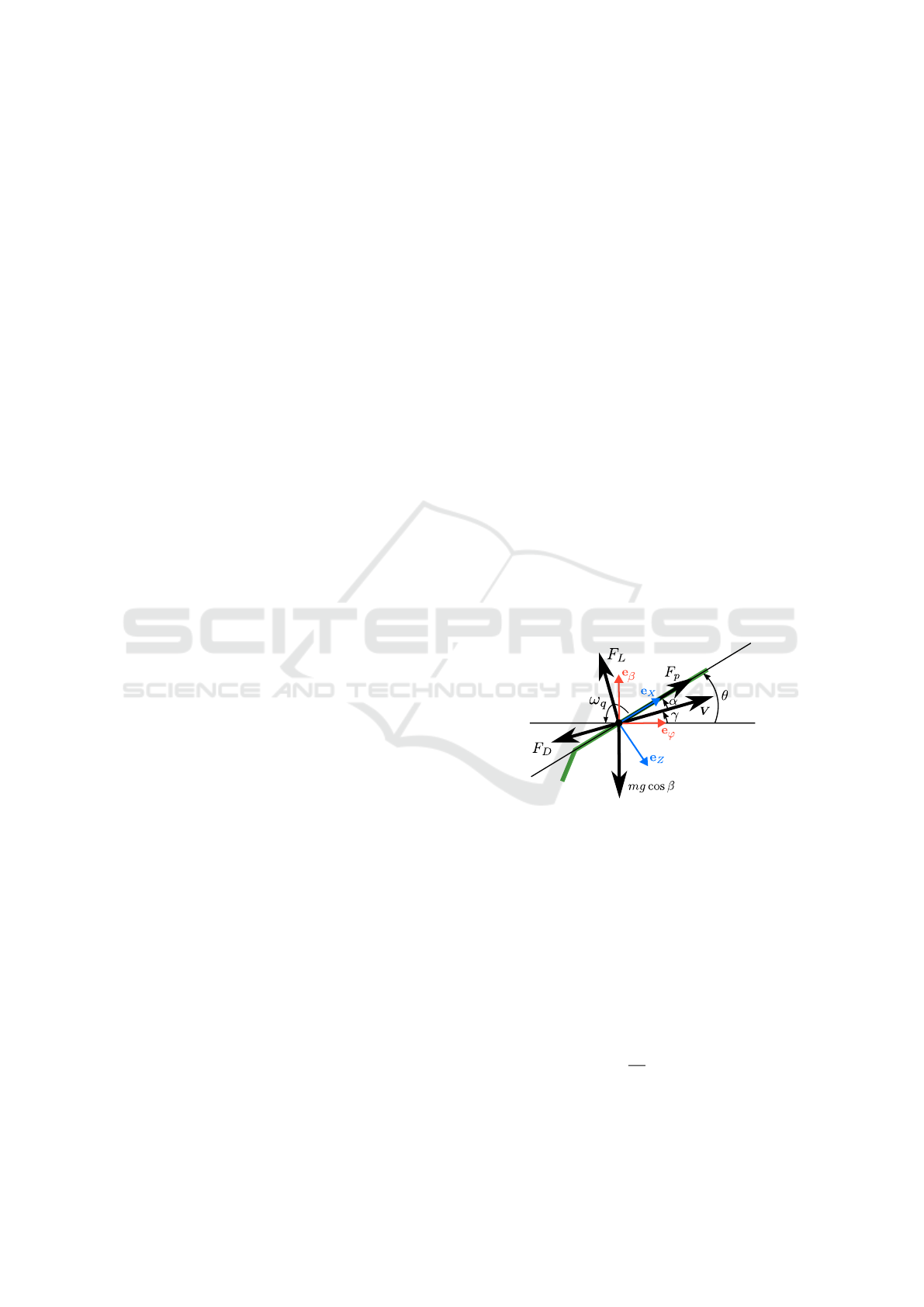
Table 1: Nomenclature.
A wing area
h
m
2
i
b wingspan [m]
c
D
,c
L
aerodynamic drag and lift coefficients
F
D
,F
D
aerodynamic drag vector and magnitude [N]
F
L
,F
L
aerodynamic lift vector and magnitude [N]
F
p
,F
p
propeller thrust vector and magnitude [N]
F
i
,F
i
inertial force vector and magnitude in a rotating frame [N]
F
t
,F
t
tether force vector and magnitude [N]
g gravitational acceleration
h
ms
−2
i
m mass [kg]
ρ air density
h
kgm
−3
i
h height [m]
p kite position
V,V kite velocity vector and magnitude
h
ms
−1
i
V
a
,V
a
kite airspeed vector and magnitude
h
ms
−1
i
V
w
,V
w
wind velocity vector and magnitude
h
ms
−1
i
X,U state and control vectors
r,ϕ, β spherical coordinates [m],[
◦
,rad],[
◦
,rad]
α,γ angle-of-attack and flight-path angle [
◦
,rad]
φ,θ, ψ roll, pitch and yaw angles [
◦
,rad]
ζ wings-tether angle [
◦
,rad]
ω
p
,ω
q
,ω
r
roll, pitch and yaw rates
h
◦
s
−1
,rad s
−1
i
craft’s longitudinal axis pointing to its nose, e
Y
is the
transversal axis pointing out of the right wing, and e
Z
is the aircraft’s vertical axis pointing down from its
belly.
We define also a set of angles that characterize the
aircraft’s attitude. The pitch angle, denoted by θ, is
the angle between the direction of the aircraft’s longi-
tudinal axis e
X
and the horizontal plane. The flight-
path angle, denoted by γ, is the angle between the hor-
izontal plane and the aircraft’s velocity vector V. The
aircraft’s angle-of-attack, denoted by α, is the angle
between the aircraft’s longitudinal axis and its veloc-
ity vector (when both the sideslip angle and the wind
speed are considered to be zero, as is the case in this
work). These three angles are represented in Fig. 1
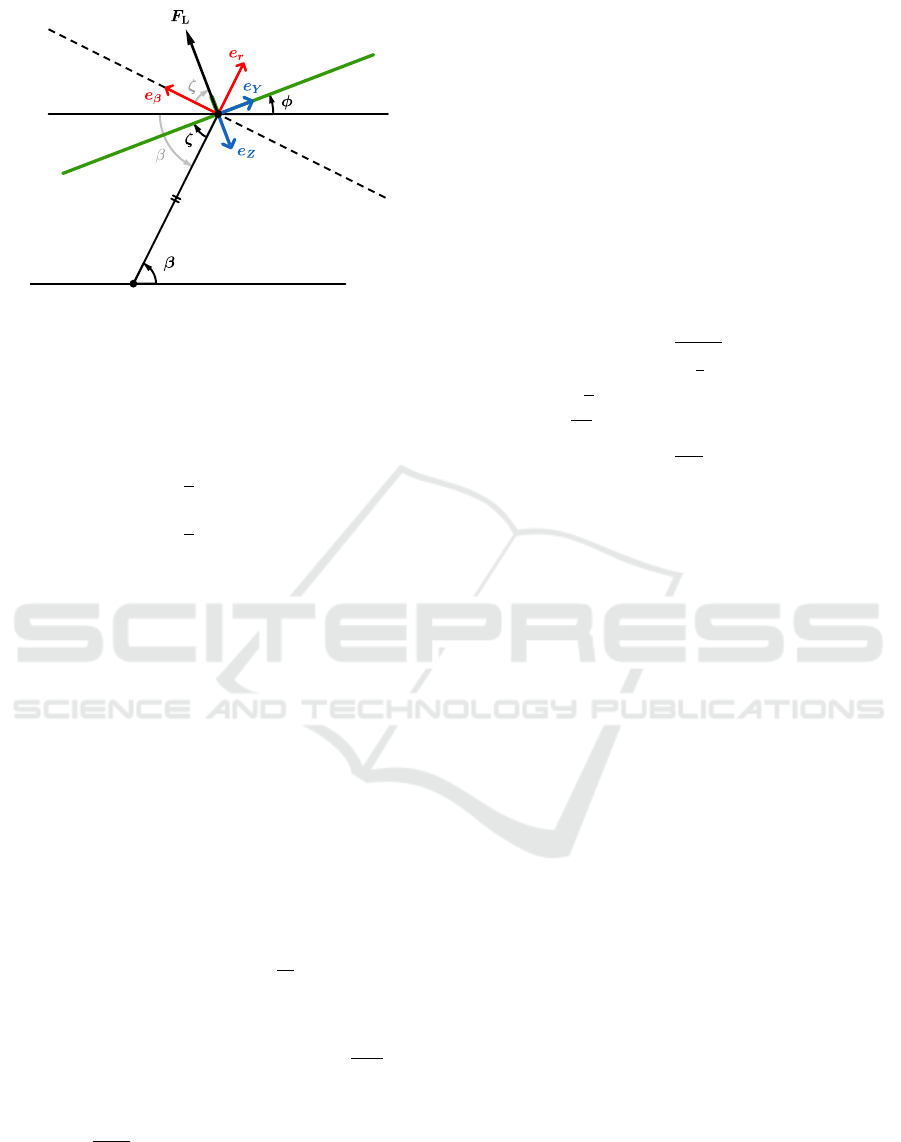
and are related by the equation θ = γ + α . The roll
angle, denoted by φ, is the angle between the hori-
zontal plane and the aircraft’s transversal axis e
Y
. We
define also the wings-tether angle ζ to be the angle be-
tween the aircraft’s transversal axis e
Y
and the tether
direction e
r
. These angles are related by the equation
β = φ + ζ and are represented in Fig. 2.
In the spherical coordinate frame, the kinematic
horizontal line
longitudinal axis
Figure 1: Airplane longitudinal model for circular tethered
flight (aircraft longitudinal shape colored green).
model of the aircraft is
r cos β
˙
ϕ =V cos γ,
r
˙
β =V sin γ,
˙
θ = ω
q
,
(4)
where ω
q
is the pitch rate. Taking the derivative of the
kinematics (4), when r is assumed constant, we have
r
¨
β =sin γ
˙
V +V cos γ
˙
γ,
r cos β
¨
ϕ =cos γ
˙
V − V sin γ
˙
γ
+
V
2
r
tanβ cos γ sinγ .
(5)
The aircraft is subject to the following forces: the pro-
peller thrust F
p
= F
p
e
X
, the weight F
g
with magnitude
Control of Fixed-Wing Tethered Aircraft in Circular Take-Off and Landing Maneuvers
321
-1.5-1.5 -1-1 -0.5-0.5 0.50.5 11 1.51.5 22 2.52.5 33 3.53.5 44 4.54.5 55 5.55.5 66 6.56.5 77 7.57.5 88 8.58.5 99
11
1.51.5
22
2.52.5
33
3.53.5
44
4.54.5
55
5.55.5
66
6.56.5
horizontal plane
horizontal plane
Figure 2: Tethered aircraft with wings-tether angle ζ possi-
bly nonzero (aircraft lateral axis colored green).
mg pointing down, the aerodynamic lift F
L
= −F
L
e
Z
,
the aerodynamic drag F
D
= −F
D
e
X
, the tether pull
F
t
= −F
t
e
r
, and also the inertial forces F
i
when a ro-
tating frame are considered. In this setting,
F
D
=
1
2
ρAV
a
2
c
D
(α) (6)
F
L
=
1
2
ρAV
a
2
c
L
(α) (7)
where V
a
is the magnitude of the airspeed vector V
a
.
Considering the total force in spherical coordi-
nates m
¨
p = [F
r
F
ϕ
F
β
]
T
= F
L
+F
D
+F
p
+F
g
+F
t
+F
i
,
we obtain for each component
F
r
=F
L
sinζ − F
t
− mg sinβ
+ mr
˙
β
2
+ mr
˙
ϕ
2
cos
2
β,
F
ϕ
= − F
L
sinγ cos ζ − F
D
cosγ + F
p
cosθ
− 2m˙r
˙
ϕcos β + 2mr
˙
ϕ
˙
βsin β, (8)
F
β
=F
L
cosγ cos ζ − F
D
sinγ + F
p
sinθ − mg cosβ
− mr
˙
ϕ
2
cosβ sin β − 2m˙r
˙
β.
Combining the last two equations with (5) and solving
for (
˙
V ,
˙
γ), we have
sinγ V cosγ
cosγ −V sin γ
˙
V
˙
γ
=
"
F
β
/m
F
ϕ
/m −
V
2
r
tanβ cos γ sin γ
#
,
which results in the dynamic equations for V and γ:
m
˙
V = − F
D
+ F
p
cosα − mg cosβ sin γ −
2V ˙r
r
,
mV
˙
γ =F
L
cos(β − φ) + F
p
sinα − mg cosβ cos γ
−
mV
2
r
tanβ cos γ.
(9)
These latter equations combine with the kinematics
(4) to define the longitudinal motion model of the
tethered aircraft. The resulting model is analogous
to the well-known longitudinal model of a fixed-wing
plane (see (Nguyen et al., 2023; Beard and McLain,
2012) and Fig. 1) when applied to the case of circular
tethered flight.
We define the control variables to be the thrust
force F
p
, the pitch rate ω
q
, and the wings-tether an-
gle ζ.
The resulting state and control vectors consid-
ered are, respectively, X =
ϕ,β,V, γ,θ
⊤
, U =
F
p
,ω
q
,ζ
⊤
, and the state-space model is given by
˙
X = f (X,U), (10)
where the dynamic function f is obtained by combin-
ing equations (4) and (9), yielding
˙
ϕ
˙
β
˙
V
˙
γ
˙
θ
=
1
r cos(β)
V cos γ
1
r
V sin γ
1
m
−F
D
+ F
p
cosα − mg cosβ sin γ
1
mV
F
L
cosζ + F
p
sinα − mg cosβ cos γ
−
mV
2
r
tanβ cos γ
ω
q
2.1 Supervisory Controller
The control of a tethered airplane during the different
stages of take-off, tethered flight and landing has var-
ious control requirements, needing different control
references and even methodologies. As such, we have
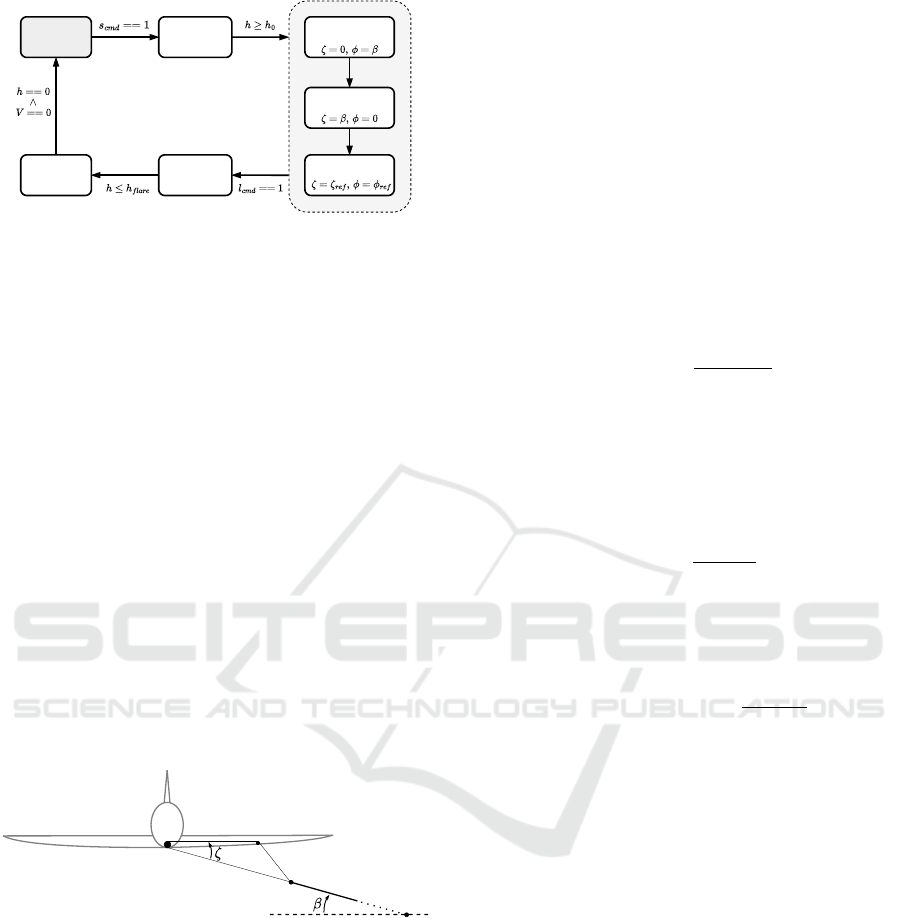
developed a hierarchical control architecture where,
in the top layer, we have designed a supervisory con-
troller that is responsible for overseeing phase transi-
tions, path planning, and establishing references for
lower-level controllers throughout each operational
phase. Figure 3 delineates the operational phases con-
sidered. The operational phase follows closely the
work (Vinha et al., 2024b), where further details can
be found. In the current work, we will focus on the
loiter phases and roll control (see Fig. 3, dashed and
shadowed loiter phase). As explained below, we study
three different loiter phases with distinct roll angles:
(i) loiter with zero wings-tether angle, (ii) loiter with
zero roll angle, and finally (iii) loiter with zero lateral
acceleration in coordinated turn flight.
2.2 Roll Control and Wings-Tether
Angle Actuation
In tethered aircraft, the tether tension tends to set the
roll angle into a specific position, being very hard to
drive to any other position just using the ailerons as
in standard untethered airplanes. This is because the
tether is restricting the motion and centrifugal forces
play a major role in this situation. Therefore the air-
craft’s center of mass tends to align with the tether
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
322
Take-off
ApproachLanding
Rest
Loiter
with
Loiter
with
Coordinated
Turn
Figure 3: The different operational phases of a tethered air-
craft during take-off and landing and three loiter maneuvers
with three different roll angles φ (and the corresponding dif-
ferent wings-tether angles ζ).
direction. The roll position is φ = β if the tether at-
tachment point is at the wing tip, or is φ = β − π/2
if the attachment point is on the fuselage surface, on
the vertical symmetry plane (see Fig. 2). In the for-
mer situation, the wings align with the tether direc-
tion, making the wings-tether angle ζ equal to zero. In
the latter, it is the aircraft’s vertical axis e
Z
that aligns
with the tether direction, making the wings-tether an-
gle ζ equal to 90 degrees. To overcome such a limita-
tion, we have devised a bridle system with attachment
points in both the wing and the fuselage surface, with
a winch inside the aircraft (see Fig. 4). The actuation
on the winch enables the bridle geometry, and thereby
the wings-tether angle and roll angle, to be controlled.
This control can be done for a wide range of values:
for the wings-tether angle ζ between 0 and π/2 rad,
corresponding to a roll angle φ between β − π/2 and
β. This bridle system was developed in (Fontes et al.,
2023) and we refer to it for further details.
Figure 4: Bridle system with attachment points on both the
wing and on the fuselage surface, with a winch inside the
aircraft to change the bridle geometry and the wings-tether
angle (in this figure, φ = 0).
2.3 Coordinated Turn
The coordinated turn is a crucial flight condition in
manned flight operations primarily for enhancing pas-
senger comfort. It involves executing turns without
experiencing lateral acceleration in the aircraft’s body
frame, resulting in a smoother flight experience. In
our work, this technique allows the aircraft to exe-
cute turns instead of skidding laterally, thus reducing
or even cancelling out the tension in the tether that
is connected to the aircraft. If there is a situation in
which the tether has to be released during the ATOL,
this coordinated turn can be performed so that the
aircraft can still perform the turn, without the tether.
Otherwise, the instant release of the tether could re-
sult in instability or even a crash.
During a coordinated turn, the roll angle φ is set
so that there is no net side force acting on the aircraft.
For this condition, the centrifugal force acting is
equal and opposite to the horizontal component of the
lift force. Moreover, in equilibrium, the vertical com-
ponent of the lift force is equal and opposite to the
vertical component of the gravity force. Summing the
forces in the horizontal and vertical direction we have
F
L
sinφ = m
(V cos γ)
2
R
, (11)
F
L
cosφ = mg cosγ , (12)
where R is the curvature radius, the horizontal pro-
jection of the tether length r in the horizontal plane
R = r cos β. Dividing both equations we obtain the
roll angle required for this maneuver
tanφ
ref
=
V
2
cosγ
gR
. (13)
Since the wings-tether angle ζ is the variable that
can be actuated directly via the bridle mechanism, we
have
ζ
ref
= β − φ
ref
= β − arctan
V
2
cosγ
gr cos β
!
. (14)
2.4 Roll Controller
The roll control itself is an easy task since it is an im-
mediate consequence of an actuated variable (recall
φ = β− ζ). However by changing the roll, the vertical
and horizontal components of the lift are modified,
with consequences on the equilibrium of forces that
the tethered aircraft is subject to. The challenge is
then to maintain the equilibrium when changing the
roll. Thus, we use a multivariable control method
and as is usual in airplane control methodology, we
devise a set of equilibrium points, compute a lin-
earized model around those points, and design a Lin-
ear Quadractic Regulator (LQR) as the controller.
For the required values of β, α, γ and φ, we deter-
mine the equilibrium points with a speed V satisfying
(
˙
β,
˙
V ,
˙
γ,
˙
θ) = (0, 0,0, 0). In section 3, in Table 3, we
report the values for the reference states used. The
state considered to design the LQR does not include
the azimuth angle ϕ. Since in CTOL we have an end-
less runway, there is no need to control the azimuth
position ϕ. Moreover, the evolution of β, V
a
, γ, and θ
Control of Fixed-Wing Tethered Aircraft in Circular Take-Off and Landing Maneuvers
323

described by the dynamic equations is not dependent
on ϕ. As such, we can safely omit ϕ from the state-
space considered for control purposes, just using it to
draw the kite trajectories during the simulation.
In LQR, we start by defining the error state
e
x =
X − x
re f
, and the error control
e
u = U − u
re f
. The lin-
earized model around the equilibrium point (
e
x,
e
u) =
(0,0) is expressed as
˙
e
x = A
e
x + B
e
u, where A and B
are the Jacobian matrices computed at the equilibrium
point.
The objective function
R
∞
0
e
x
T
Q
e
x +
e
u
T
R
e
u
dt, in-
cludes two matrices, Q and R, which are initially set
to be diagonal and satifying the Bryson and Ho rule
(Bryson and Ho, 1975). These matrices are then man-
ually adjusted to achieve the desired response. Table
3 reports the values of the matrices used in the simu-
lation for each phase.
In order to test the roll controllers, we devise an
experiment with three loiter phases with different roll
values (see Fig. 3).
In the first loiter phase, we maintain the wings-
tether equal to zero (corresponding to roll angle equal
to β). In the second loiter phase, we seek another sim-
ple control objective which is to attain zero roll, cor-
responding to leveled wings. In this case , we want
that φ
ref
= 0 and ζ
ref
= β These variables can be mea-
sured and controlled directly by the aircraft sensors
and actuators (in our case using a small winch). In
the third loiter phase, the control objective is to attain
a coordinated turn. The variable to regulate is, as we
have seen, the lateral acceleration a
Y
. As the last case,
this variable can be measured directly by the aircraft
sensors.
The transitions between phases can be done by
an operator command or after a specified time pe-
riod. In this simulation, we defined as t
loiter1
∈
[0,10]s, t
loiter2
∈ [10,30]s and t
loiterCT
∈ [30,60]s to be
the time in each loiter phase, respectively.
3 SIMULATION RESULTS
The simulation parameters were established consid-
ering a small-scale aircraft, facilitating the compari-
son of simulation results with future experiments data.
The aircraft and simulation parameters are given in
Table 2.
Table 2: Aircraft and Simulation Parameters.
A = 0.0720m
2
, m = 0.350kg
b = 0.60m, r = 30b = 18m
ω
q
∈ [−20;20]
◦
s
−1
, F
p
∈ [0;1.5] N, ζ ∈ [0;90]
◦
ρ = 1.225kg m
−3
, g = 9.8m s
−2
, V
w
= 0m s
−1
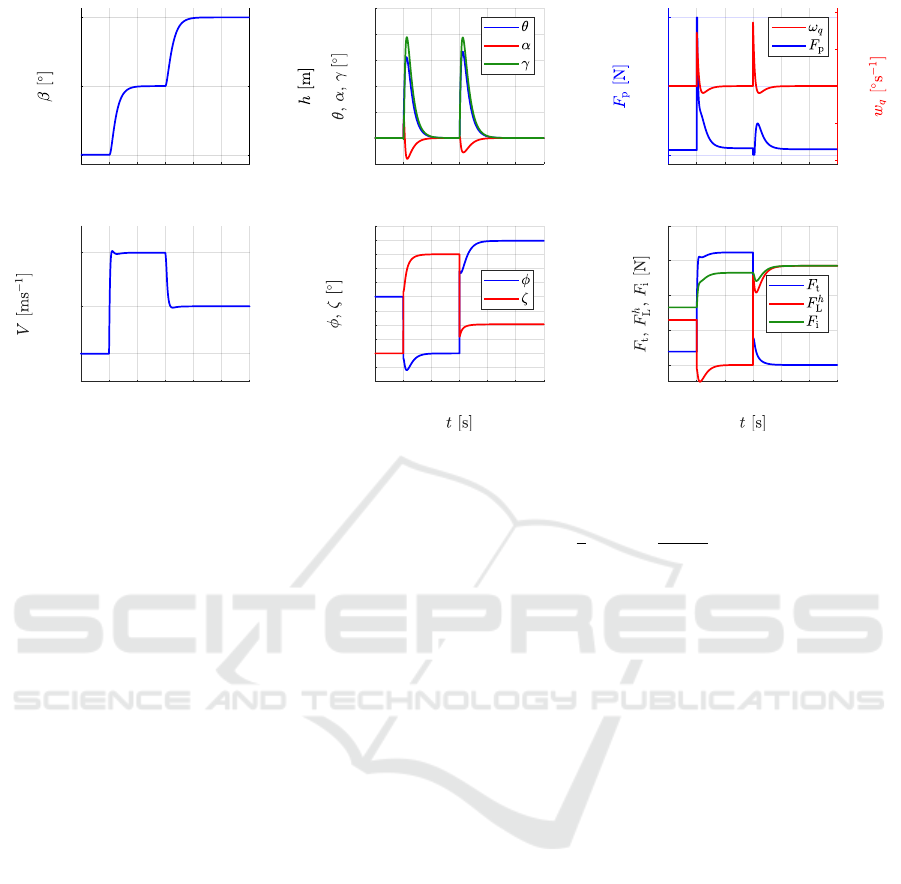
Table 3 provides a summary of the reference
values and gains for the controllers tested for each
phase. The controllers were implemented using Mat-
lab/Simulink and the results of the simulation are dis-
played in Fig. 5.
Table 3: Controller references, gains, and objectives for
each loiter phase.
Loiter with φ = β
(β,V,γ, θ)
re f
= (20.00,8.95, 0,0)
Q = diag([63.68 0.085 5.62e3 33.19])
R = diag([2.61 8.21])
Loiter with φ = 0
(β,V,γ, θ)
re f
= (35.00,10.57, 0,0)
Q = diag([14.59 0.39 8.21 8.21])
R = diag([0.44 8.21 2.68])
Coordinated Turn
(β,V,γ, θ)
re f
= (50,9.71, 0,0)
Q = diag([14.59 0.39 8.21 8.21])
R = diag([0.44 8.21 2.68])
In the left column of the figure, we can see the el-
evation angle of the kite on the left axis and the height
on the right axis, on top of the velocity V of the air-
craft. In the second column, we can see the pitch,
angle-of-attack and flight-path angles on the top, and
on the bottom the control variables: propeller thrust
force and pitch rate (with different axes on the oppo-
site side, respectively). Finally, in the right column,
we can see the roll and wings-tether angles above the
forces graph: tether force, the horizontal component
of the lift force (F
h
L
) and the inertial force magnitude.
We can observe that the trajectories follow closely
the references determined previously. Starting with
the first loiter, where ζ is zero, the aircraft maintains
its attitude and altitude/elevation for 10s without any
changes. Then, in the second loiter phase, the roll
angle is set to zero and the elevation angle to 35
◦
.
This makes the aircraft pitch up and accelerate until it
reaches the new speed required for this new equilib-
rium point. As predicted, ζ goes to 35
◦
, which equals
the new elevation angle. Note that in this phase, the
horizontal component of the lift force is zero, that is
true when the roll is zero. Finally, after 20s in this
second phase, the aircraft performs a coordinated turn
flight with an elevation angle chosen as 50
◦
. Here, the
kite goes to a new equilibrium point where the wings-
tether angle goes to the predefined value computed
using equation (14), which is 10
◦
. The new speed ref-
erence is also followed. We can also point out that
in the coordinated turn phase, the tether force is zero,
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
324
0
10
20
30
40
50
60
20
35
50
6.16
10.32
13.79
0
10
20
30
40
50
60
8.95
9.71
10.57
0
10
20
30
40
50
60
-2
0
2
4
6
8
10
0
10
20
30
40
50
60
0
0.75
1.5
-20
-10
0
10
20
0
10
20
30
40
50
60
-10
-5
0
5
10
15
20
25
30
35
40
45
0
10
20
30
40
50
60
0
1
2
3
4
Figure 5: Simulation results during the 3 types of loiter.
which proves that if the tether needs to be released,
the aircraft will still be able to perform the turn with-
out it. Also, as predicted, the inertial force magnitude
is equal to the horizontal component of the lift force
acting on the aircraft.
4 DISCUSSION AND
CONCLUSIONS
It was shown that the aircraft is able to successfully
control its roll angle during each of the three phases
described here. This paper, together with (Vinha
et al., 2024b), reveals that the implementation of a
circular take-off and landing approach, particularly
for tethered aircraft like those employed in Airborne
Wind Energy Systems, is viable and allows the au-
tomation required by this industry.
In the overall control architecture, we switch be-
tween different controllers. We are aware that such an
approach might lead to instability issues. The simula-
tion results do not show any unstable behavior. Nev-
ertheless, the stability properties of the overall archi-
tecture should be studied in future work.
The tethered flight is here further explored by im-
plementing a coordinated turn flight which grants the
aircraft the capability to be released from its tether
and remain stably airborne. However, a coordinated
turn flight can only be performed within certain con-
ditions. If we combine F
L
from equations (11) and
(7), and assuming that we are in a situation with
V
w
= 0, both V
2
terms can be cancelled. Also, if we
assume that we are in the 1st loiter phase where ζ = 0
and β = φ, we can solve for β, obtaining:
β
∗
= φ
∗
=
1
2
arcsin
4m
rρAc
L
, β ∈ [0, 45]
◦
. (15)
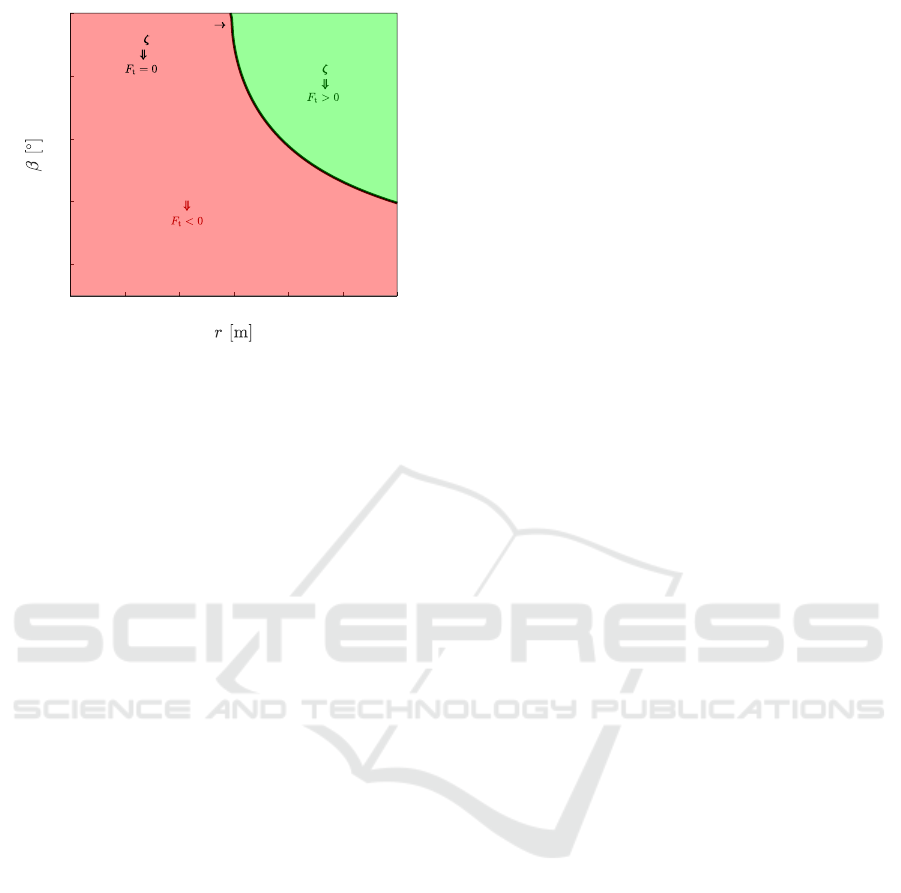
This equation identifies, for the aircraft dimen-
sions defined previously, the regions where it is possi-
ble to perform a coordinated turn flight for a specific
tether length in this loiter phase. In Fig. 6, β
∗
is plot-
ted for several tether lengths (dark line). This line cor-
responds to a situation in which the coordinated turn
flight is performed with ζ = 0 and the tether force is
zero. A coordinated turn flight would be impossible
to achieve for the flight conditions with the elevation
and tether length in the red region (left and below the
dark line). In this situation, the tether tension would
be negative which is an impossible condition since the
tether is not rigid.
Finally, the green area, above the dark line, is the
region where any tethered flight can be achieved using
a positive wings-tether angle. Here, the tether force is
positive, partially canceling the centrifugal forces act-
ing on the aircraft in this flight condition. Note that, in
this region, the aircraft can also perform a coordinated
turn flight, if the roll angle is set adequately. However,
the use of a bridle device is essential to achieve such
roll with a positive wings-tether angle, as was simu-
lated in the third loiter case.
We can also conclude that the length of the tether
serves as a crucial design parameter, significantly de-
termining the maximum altitude achievable through
a circular take-off and landing strategy, but also the
conditions for which is possible to perform coordi-
nated turn flights.
Control of Fixed-Wing Tethered Aircraft in Circular Take-Off and Landing Maneuvers
325
0 5 10 15 20 25 30
5
15
25
35
45
Coordinated turn flight
with = 0
Any tethered flight
(coordinated turn or not)
with > 0
Coordinated turn flight
impossible
Figure 6: Plot of β
∗
for various tether lengths, using the
aircraft parameters from the simulation.
ACKNOWLEDGEMENTS
This research is supported by FCT/MCTES
(PIDDAC), through projects 2022.02320.PTDC-
KEFCODE, and 2022.02801.PTDC-UPWIND-
ATOL (https://doi.org/10.54499/2022.02801.PTDC),
and grants 2021.06313.BD, and 2021.07346.BD.
REFERENCES
Beard, R. W. and McLain, T. W. (2012). Small Unmanned
Aircraft. Princeton.
Blanch, M., Makris, A., and Valpy, B. (2022). Getting air-
borne – the need to realise the benefits of airborne
wind energy for net zero. Technical report, Zenodo.
Bryson, A. E. and Ho, Y.-C. (1975). Applied Optimal Con-
trol: Optimization, Estimation, and Control. Taylor &
Francis.
Cherubini, A. (2017). Advances in airborne wind en-
ergy and wind drones. PhD thesis, Scuola Superiore
Sant’Anna.
Cherubini, A., Szalai, B., Schmehl, R., and Fontana, M.
(2017). Preliminary Test on Automatic Take-Off and
Landing of a Multi-Drone Low-Drag Airborne Wind
Energy System. In 7th Airborne Wind Energy Confer-
ence (AWEC 2017).
Directorate-General for Research and Innovation (European
Commission) and Ecorys (2018). Study on challenges
in the commercialisation of airborne wind energy sys-
tems. Publications Office of the European Union, LU.
Fagiano, L. and Schnez, S. (2017). On the take-off of air-
borne wind energy systems based on rigid wings. Re-
newable Energy, 107:473–488.
Fernandes, G. M. (2023). Take-off and Landing of Au-
tonomous Flying Wings in Airborne Wind Energy
Systems. Master’s thesis, Universidade do Porto,
Porto, Portugal.
Fontes, F. A. C. C., Paiva, L. T., Fernandes, M. C. R. M., and
Vinha, S. (2023). A tethered aircraft bridle system,
method of operating the same and use thereof. Internal
Report, SYSTEC, University of Porto.
Geebelen, K., Vukov, M., Zanon, M., Gros, S., Wagner, A.,
Diehl, M., Vandepitte, D., Swevers, J., and Ahmad,
H. (2013). An Experimental Test Setup for Advanced
Estimation and Control of an Airborne Wind Energy
System. In Ahrens, U., Diehl, M., and Schmehl,
R., editors, Airborne Wind Energy, Green Energy and
Technology, pages 459–471. Springer, Berlin, Heidel-
berg.
Loyd, M. L. (1981). Wind driven apparatus for power gen-
eration.
Marques, M. N., Magalh
˜
aes, S. A., Dos Santos, F. N., and
Mendonc¸a, H. S. (2023). Tethered Unmanned Aerial
Vehicles—A Systematic Review. Robotics, 12(4):117.
Number: 4 Publisher: Multidisciplinary Digital Pub-
lishing Institute.
Nguyen, H. T., Prodan, I., and Fontes, F. A. C. C. (2023).
Trajectory Optimization and NMPC Tracking for a
Fixed–Wing UAV in Deep Stall with Perch Landing.
In 2023 European Control Conference (ECC), pages
1–7.
Rieck, B., Ranneberg, M., Candade, A., Bormann, A., and
Skutnik, S. (2017). Comparison of Launching and
Landing Approaches. In 7th Airborne Wind Energy
Conference (AWEC 2017).
Riley, K., Hobson, M., and Bence, S. (2006). Mathemati-
cal Methods for Physics and Engineering. Cambridge
University Press.
Schmehl, R., editor (2018). Airborne Wind Energy: Ad-
vances in Technology Development and Research.
Green Energy and Technology. Springer, Singapore.
Sieberling, S., Ruiterkamp, R., de Bie, R., and Bontekoe,
E. (2011). Discussion of a rotating platform for take-
off and landing of a tethered aircraft. In 4th Airborne
Wind Energy Conference (AWEC 2011).
Vermillion, C., Cobb, M., Fagiano, L., Leuthold, R., Diehl,
M., Smith, R. S., Wood, T. A., Rapp, S., Schmehl,
R., Olinger, D., and Demetriou, M. (2021). Electric-
ity in the air: Insights from two decades of advanced
control research and experimental flight testing of air-
borne wind energy systems. Annual Reviews in Con-
trol, 52:330–357.
Vinha, S., Fernandes, G. M., and Fontes, F. A. C. C.
(2024a). A Discussion on Automatic Take-off and
Landing Approaches for Airborne Wind Energy Sys-
tems. In Book of Abstracts of the International Air-
borne Wind Energy Conference 2024, Madrid, Spain.
Vinha, S., Fernandes, G. M., Nguyen, H. T., Fernandes,
M. C., and Fontes, F. A. (2024b). Automatic Circular
Take-off and Landing of Motorized Tethered Aircraft.
In 2024 European Control Conference (ECC), pages
681–686.
Zanon, M., Gros, S., and Diehl, M. (2013). Rotational start-
up of tethered airplanes based on nonlinear MPC and
MHE. In 2013 European Control Conference (ECC),
pages 1023–1028.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
326
