
Optimal Segmentation of LPV Systems for Control Applications via
Genetic Algorithms
Zolt
´
an T
´
eczely
a
and B
´
alint Kiss
b
Budapest University of Technology and Economics, Department of Control Engineering and Information Technology,
M
˝
uegyetem rkp. 3, H-1111 Budapest, Hungary
Keywords:
LPV, Polytopic, Conservatism, LMI, Genetic Algorithms, Global Optimization.
Abstract:
The paper presents an automatic method for subdividing parameter regions in a Linear Parameter-Varying
(LPV) controlled system based on global optimization. A known limitation of the LPV framework is the
conservatism originating from excessive parameter regions. This conservatism can be relaxed if the controller
design is performed in a collection of subregions of the parameter bounding box wherein local controllers are
synthesized yielding an increased performance level. The choice of subregion boundaries, however, is usually
based on heuristics. This, combined with the recurring issue of scheduling variable selection motivates an
automated LPV parameter space description. The paper suggests genetic algorithms to automate parameter
space subdivision where the problem is posed in terms of global optimization, considering closed-loop per-
formance, computational complexity and parameter-dependent performance constraints. The benefits of the
proposed approach are demonstrated on a pitch-axis missile autopilot, which is formulated as a quasi-LPV
model but generally does not admit the polytopic framework. Hence, the necessary simplifications and selec-
tion criteria are introduced to effectively employ polytopic LPV methods in the vertical acceleration control
for such a missile.
1 INTRODUCTION
Nonlinear mechatronic systems are often mod-
elled and controlled based on the polytopic Linear
Parameter-Varying framework. Numerically efficient
controller synthesis is usually formulated as a set of
linear matrix inequality (LMI) problems largely built
around the works of (Gahinet and Apkarian, 1994)
and (Apkarian and Gahinet, 1995). Arguably the most
important limitation characterizing LPV control is the
conservatism introduced by the definition of the pa-
rameter region which might be a result of inadequate
knowledge of the system operating range or geomet-
ric and computational complexity. Traditionally, in
the overwhelming majority of research efforts, a large
emphasis has been put on parameter dimension re-
duction, e.g. (Kwiatkowski and Werner, 2008) or the
notion of parameter-dependent Lyapunov functions
(PDLFs) (Gahinet et al., 1996). The celebrated paper
(Scherer, 2001) introduced the idea of subdivision of
the parameter space stating that, performance can be
increased arbitrarily, while (Kruszewski et al., 2009)
a
https://orcid.org/0009-0005-7592-9038
b
https://orcid.org/0000-0002-5532-3435
uses a fuzzy approach. Regarding the transition be-
tween two sets of polytope regions, several famous
articles have been presented including (Lu and Wu,
2004) and (Yan and
¨
Ozbay, 2007) stating the theoret-
ical problem whilst more recent advancements tend
to be more application-oriented e.g. (Jiang et al.,
2015) and (Huang et al., 2021) and (Robert et al.,
2007). Most of these articles are concerned with mul-
tiple Lyapunov functions assigned to neighbouring
systems resulting in the problem of switching LPV
systems. Although these methods form the basis of
current developments in LPV control, a more sophis-
ticated mathematical effort prevents them from being
used day-to-day in engineering practices. Although
polytope segmentation is nothing new, an automated
framework for scheduling variable selection and deal-
ing with more complicated nonlinear matters is still
lacking. On the other hand, computational complex-
ity issues and along with them, associated solutions
typically originate from either high-complexity struc-
tures or inherently numerically demanding models
like flows (Das and Heiland, 2023).
The primary contribution of this paper, therefore,
is a systematic method for designing segmented poly-
Téczely, Z. and Kiss, B.
Optimal Segmentation of LPV Systems for Control Applications via Genetic Algorithms.
DOI: 10.5220/0013067200003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 503-510
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
503

topic LPV controllers. The proposed method uses a
common Lyapunov function as the basis of the solu-
tion and partitions the parameter space into multiple
smaller sub-polytopes according to a cost function in-
volving a joint metric describing the performance gain
and additional complexity. A secondary contribution
is a case study on a missile, wherein the key hardships
and limitations are also highlighted along with open
questions and improvement possibilities. The general
missile model is a well-known example of quasi-LPV
modelling and subsequent control but the polytopic
approach is not particularly suited for it unless the
necessary design consideration steps are taken.
The remainder of the paper is structured as fol-
lows: the following section introduces the necessary
background for LPV controller synthesis and pro-
poses the segmented polytopic description. Section
3 presents a genetic algorithm-based optimization for
such a system and Section 4 introduces the missile
model in a polytopic LPV formulation. Finally, Sec-
tions 5 and 6 include validation results performed in
a simulation environment and conclusive remarks re-
spectively.
2 BACKGROUND
2.1 LPV Models and Robust Controller
Synthesis
A polytopic LPV model can be generated from gen-
eral LPV models with the sector nonlinearity ap-
proach (Ohtake et al., 2001), even if the parameters
enter the matrices nonlinearly. Consider a polytopic
LPV model in the form
˙x =
N
∑
i=1
µ
i
(θ)(A
i
x + B
2i
u + B
1i
d)
y =
N
∑
i=1
µ
i
(θ)(C
2i
x)
(1)
where µ
i
are weighting functions belonging to the
simplex
Ξ
θ
=
µ(θ) ∈ R
n
:
N
∑
i=1
µ
i
(θ) = 1
:
µ
i
(θ) ≥ 0
(2)
and the scheduling parameter vector θ and its deriva-
tive ρ are available in real-time and lie inside the hy-
percube defined by
S
θ
=
(θ
1
...θ
s
)
T
:
θ
i
∈ (θ
min
θ
max
)
S
ρ
=
(ρ
1
...ρ
s
)
T
:
ρ
i
∈ (ρ
min
ρ
max
)
(3)
with N = 2
s
.
Based on these parameter boxes, vectors can be
formed by taking all possible permutations of the
bounds of the parameters. These vectors will, in turn,
accommodate the polytopic LPV form. If the depen-
dence of the state space matrices in (1) on the schedul-
ing variables θ is affine, all the possible models will be
located inside the polytope of models whose vertices
are the images of the vertices, ω
i
, that is, the param-
eter vector belongs to the convex hull formed by the
vertices
P(θ) ∈ Co
A
i
B
i
C
i
D
i
:
=
N
∑
i=1
µ
i
(θ)M
i
:
µ
i
(θ) ≥ 0,
N
∑
i=1
µ
i
(θ) = 1
(4)
Controller synthesis for an LPV system with H
∞
objective can be built on the well-known Bounded-
Real Lemma (BRL) (Apkarian et al., 1995). For the
closed-loop, it states that the LPV system of the form
(1) has quadratic performance γ if and only if there
exists a single matrix X ≻ 0 such that
A
T
cl
(θ)X +XA
cl
(θ) * *
B
T
cl
(θ)X −γI *
C
cl
(θ) D
cl
(θ) −γI
≺ 0 (5)
is feasible for any values of the parameter vector.
Based on convex geometric considerations, the above
theorem holds if and only if it holds at the vertices.
This result holds for the situation, where the matri-
ces are affine functions of the scheduling parameters
(Apkarian et al., 1995). For the static state feedback
u(t) = K(θ(t))x(t) (6)
we need the controller, that is parameterized by the
scheduling parameters
K(θ(t)) =
N
∑
i=1
µ
i
(θ)K
i
, µ
i
(t) ≥ 0,
N
∑
i=1
µ
i
(t) = 1 (7)
where the controller corresponding to the vertex is de-
signed with respect to a common Lyapunov function.
The resulting controller can be scheduled in real-time
based on (7) by the weighting functions µ.
2.2 Segmentation Strategy
Now let us consider the following scenario: the oper-
ating region is assumed to fully cover the parameter
space S
θ
and an H
∞
LPV controller is designed for P
with γ performance. Let us now define P
1
⊂ P and
P
2
⊂ P such that P
1
∩ P
2
=
/
0 and corresponding H
∞
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
504

controllers are designed with better (γ
1
< γ and γ
2
< γ)
performances such that (P
1
∪P
2
) = P . In general, it is
always assured, that whichever subregion the system
resides in, corresponds to a less conservative perfor-
mance level, that is, γ
1
< γ and γ
2
< γ. For now, we
do not care about the relation between γ
1
and γ
2
.
Starting from (1) with a slight reformulation, let
us consider i number of convex hulls and P
i
. These
sets of systems lie within these polytopes
P
i
(θ
i
) =
A(θ) B
1
(θ) B
2
(θ)
C
1
(θ) D
11
(θ) D
12
(θ)
C
2
(θ) D
21
(θ) D
22
(θ)
∈ P
i
(8)
that is, the model sets are parameterised by i sets of
scheduling variables that describe the same quantities
but have different bounds.
For each of these sets of models, we require the
closed-loop BRL (5) to hold, moreover, the semidefi-
nite programming task should be performed simulta-
neously corresponding to a common Lyapunov matrix
X. The resulting optimization problem is then formu-
lated as
min
X
γ
i
(9)
subject to
X ≻ 0
A
T
cl,i
(θ)X +XA
cl,i
(θ) * *
B
T
cl,i
(θ)X −γ
i
I *
C
cl,i
(θ) D
cl,i
(θ) −γ
i
I
≺ 0
(10)
where i denotes the number of subsegments. Based
on these minimization problems, dynamic or static
feedback controllers can be designed and the result-
ing sub-controllers can be easily switched in real time
according to the instantaneous state of the system.
Remark 1. The closed-loop is quadratically stable
and has H
∞
performance with γ
i
performance limit for
the separate subsections as long as all regions corre-
spond to a common Lyapunov function.
3 AUTOMATIC SEGMENTATION
Polytope segmentation and, in fact, the selection of
the scheduling variables especially if there is nonlin-
ear coupling in the system is usually a heuristic pro-
cess, in many cases, leading to suboptimal choices.
Therefore, to depart from this nature, a systematic
procedure is proposed to refine the number of sub-
polytopes and their respective boundaries. This leads
to an optimization task, which prescribes a maximiza-
tion of overall closed-loop performance over the en-
tire parameter range with additional penalty terms
for computational complexity and operating point-
dependent weighting in the loss function. Since these
constraints often counteract each other, a multiobjec-
tive optimization framework is adopted in the form
of genetic algorithms. The next two sections present
an overview of genetic algorithms and multiobjec-
tive global optimization. The described methods are
directly applicable to the internal LMI optimization
loop with a user-defined loss function involving a
number of configurable performance and robustness
metrics, out of which a key element is the closed-loop
H
∞
norm γ.
3.1 Genetic Algorithms
Genetic algorithms are based on the natural selec-
tion scheme initializing with a random population
evolving through the genetic operations selection,
crossover and mutation into a subsequent population.
First, the survival of the fittest individuals is ensured
by the selection process, then the crossover and mu-
tation operations will generate the following popula-
tion. The optimization is continued until the optimiza-
tion objectives or any exit criteria (e.g. number of
generations) are reached. For the interested reader,
an overview of genetic algorithms can be found in
(Kramer, 2017).
3.2 Multiobjective Optimization
Genetic algorithms are suitable options for multiob-
jective optimization problems described by
min
x∈C
F(x) =
f
1
(x)
f
2
(x)
.
.
.
f
n
(x)
(11)
where n is the number of optimization objectives. Of
course, especially if these objectives are conflicting,
the existence of a x
∗
solution is not guaranteed. The
usual solution to this is through the notion of Pareto-
sets (Marler and Arora, 2004). In this paper, the
weighted sum method is applied, which converts mul-
tiple objectives to a single objective via the convex
combinations of the individual objectives (Do et al.,
2011) resulting in
min J =
n
∑
i=1
α
i
f
i
(x), x ∈ C (12)
where
∑
n
i=1
α
i
= 1.
Optimal Segmentation of LPV Systems for Control Applications via Genetic Algorithms
505

3.3 Optimization of LPV Segment
Boundaries for H
∞
Control
Let us denote the vector of the optimization variable
with η. Then, the general augmented LPV system is
˙x
z
y
=
A(θ,η) B
1
(θ,η) B
2
(θ,η)
C
1
(θ,η) D
11
(θ,η) D
12
(θ,η)
C
2
(θ,η) D
21
(θ,η) D
22
(θ,η)
x
w
u
(13)
where x ∈ R
n
is the state vector, w ∈ R
m
is the input
vector of disturbances, u ∈ R
n
u
is the vector of control
inputs, z ∈ R
p
are the performance outputs and y ∈ R
n
y
are the measured outputs.
For any vertex model, all parameter boundaries
- or the extreme values of scheduling variables - are
part of the optimization vector, that is, θ ⊂ η. Hence,
the dependence (η, θ) will be shortened to (η) More-
over, η may contain terms corresponding to the con-
troller (tuning parameters) and meta-information re-
garding the number of sub-polytopes formulated by
the ’closeness’ of the parameter boundaries.
The dynamic LPV controller is defined as
˙x
c
u
=
A
c
(θ) B
c
(θ)
C
c
(θ) D
c
(θ)
x
c
y
(14)
with A
c
∈ R
n×n
, B
c
∈ R
n×n
y
, C
c
∈ R
n
u
×n
and D
c
∈
R
n
u
×n
y
.
The standard way of closed-loop controller syn-
thesis is to start from (10) and develop controllers
with a single Lyapunov matrix for all vertices. The
number of vertices for a single polytope is exact but
for a segmented polytope, the number of subsegments
(i) needs to be defined in advance. Therefore our
strategy is to declare a maximum number of segments
on each dimension and set the boundaries according
to the optimization outcome, which in the extremes
may mean that either no segmentation takes place (all
boundaries are optimized to be the same) or the max-
imum number of subsegments are generated.
Let us now introduce the shorthand notations with
separated performance outputs z = [z
1
z
2
]
T
and dis-
turbance inputs for reference and actual disturbance
parts w = [w
1
w
2
]
T
ˆ
A(η)
:
= A(η) − B
2
(η)C
12
(η)
˜
A(η)
:
= A(η) − B
12
(η)C
2
(η)
B
1
(η)
:
= [B
11
(η) B
12
(η)]
C
T
1
(η)
:
= [C
T
11
(η) C
T
12
(η)]
where the dependence on (η) suggests that each ma-
trix corresponds to an individual in the genetic algo-
rithm population.
Based on (Wu et al., 1995) the general formulation
of (10) is augmented with the optimization variables
leading to the set of synthesis LMIs
Y
ˆ
A
T
+
ˆ
AY − B
2
B
T
2
* *
C
11
Y I
ne1
*
γ
−1
B
T
1
0 −I
nd
≺ 0
˜
A
T
X +X
˜
A −C
T
2
C
2
* *
B
T
11
X I
nd1
*
γ
−1
C
1
0 −I
ne
≺ 0
X γ
−1
I
n
γ
−1
I
n
Y
⪰ 0
(15)
with
ˆ
A =
ˆ
A(η),
˜
A =
˜
A(η), B
⋆
= B
⋆
(η), C
⋆
= C
⋆
(η)
and γ = γ(i) dependence omitted for conciseness. This
semidefinite programming task will have to be solved
for all possible edge models for all individuals in the
population.
Once the optimization is performed, the controller
can be recovered based on (Wu et al., 1995).
3.4 Recombination and Mutation
Definition
Mutation in the genetic algorithm for the nested LMI
optimization task can be described by
η
child
= η
parent
rand[0,
η
parent
θ
max
] (16)
Recombination in the genetic algorithm for the
nested LMI optimization task is performed as de-
scribed in (Deep et al., 2009) by the Laplace crossover
logic as
η
child,1
= η
parent,1
+ λ
(η
parent,1
–η
parent,2
)
η
child,2
= η
parent,2
+ λ
(η
parent,1
–η
parent,2
)
(17)
where λ is an integer randomly chosen from a Laplace
distribution.
3.5 Objective Function
The decision vector will include the optimizing vari-
ables η, the closed-loop performance γ
i
for each sub-
segment and an added computational complexity met-
ric (Cc). With each term, a weighting α will be asso-
ciated. Moreover, a kernel function is introduced with
the objective of weighting the relevant parameter sub-
space.
Since the scheduling parameter space might cover
combinations that are physically not reachable (this
can happen e.g. when there is a coupling between
multiple scheduling variables) an extra weighting
function is introduced to remove the importance of
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
506

unreachable subregions. This is formulated via a ker-
nel function denoted with K
g
and the corresponding
weights are given as the convolution of K
g
and the
closed-loop H
∞
norm γ by the equation
w(1,. ..,i) = K
g
∗ ∥F
l
(P(η),
˜
K(θ))∥
H∞
(18)
with the controller
˜
K(θ) =
N
∑
i=1
α
i
(θ)K
i
(19)
where θ = [θ
1
.. .θ
r
] is the scheduling parameter
vector, r is the number of scheduling parameters,
w(η
1
,. .., η
r
) is the weight of the actual subsegment
and F
l
represents the lower linear fractional transfor-
mation operation. The optimization term correspond-
ing to subsegment weighting then reads
Z
¯
θ
¯
θ
w(i)∥F
l
(P(η),
˜
K(θ))∥
H∞
r
d
r
η (20)
Note, that in (20) the integral is a multiple integral
depending on the dimension of θ. An example result
of the subsection weighting is presented in Figure 1.
Figure 1: Edge models encompassing parameter subsec-
tions with corresponding weights represented by colours.
Moreover, computational complexity is formu-
lated as a polynomial function of the number of sub-
polytopes to reflect the number of LMIs to be solved,
that is,
Cc = r
3
(21)
The combination of the subsegment performance
terms will be predefined according to the system con-
straints and performance criteria. With that, the ob-
jective function reads
J(η,γ,Cc,w) = α
1
r
3
+ α
2
Z
¯
θ
¯
θ
w(i)∥F
l
(P(η),
˜
K(θ))∥
H∞
r
d
r
η
(22)
3.6 Genetic Algorithm Program for
Optimised LMI Synthesis
3.6.1 Algorithm
The program for the nested genetic algorithm - LMI
optimization task is presented in the following algo-
rithm.
Data: η,γ,Cc
Result: Optimal boundaries of polytopes
Initialize with η = η
0
and γ = γ
0
and
Cc = Cc
0
;
Set frozen w weighting to each subsegment;
while exit criteria do
Solve synthesis LMIs (15) to acquire γ;
Calculate computational complexity
value (Cc);
Compute the loss function J(η,γ,Cc,w)
for the current generation;
Select the individuals;
Apply crossover and mutation to generate
η
child
;
end
Algorithm 1: Polytopic segmentation based on closed-loop
gain optimization.
3.6.2 Computational Complexity
As per the synthesis process, for r number of schedul-
ing variables the number of LMIs to be solved is
(3r + 2) to make sure X and Y in (15) are positive
definite. That is, for a single polytopic LPV region.
Assuming equal segmentation in all dimensions, the
growth can be described by (3r +2)r
2
. This results in
O(n
3
) which means the problem is tractable and can
be solved in polynomial time.
4 PITCH-AXIS CONTROL OF A
MISSILE
For the validation of the automatic segmentation
method, the well-known example of a generic missile
is presented based on (Shamma and Cloutiert, 1993)
and (Tan et al., 2000) with the single purpose of ver-
tical acceleration control. The main design steps and
modelling ideas are taken over from (Wu et al., 1995),
while the fundamental difference of using a polytopic
formulation is also introduced. The notations are col-
lected in table 1. The plant variables are tail deflection
(δ[deg]), angle of attack (α[deg]), pitch rate (q[
deg
s
]),
requested and measured normal acceleration (A
z,req
[g]
and A
z
[g]) respectively and the Mach number (M).
Optimal Segmentation of LPV Systems for Control Applications via Genetic Algorithms
507

Table 1: Parameters of the missile model.
Notation Value Description
P
0
4748
kg
m
2
Static pressure at
6000 m
S 0.04 m
2
Surface area
m 204 kg Mass
v
s
315
m
s
Speed of sound
d 0.2286 m Diameter
I
y
0.7 Pitch-axis inertia
K
α
7 scale(P
0
S/mv
s
)
K
q
7 scale(P
0
Sd/I
y
)
K
z
3.5 scale(P
0
S/m)
C
a
-0.3 Drag coefficient
a
n
0.000103f deg
−3
b
n
-0.00945f deg
−2
c
n
-0.1696f deg
−1
d
n
-0.034f deg
−1
a
m
0.000215f deg
−3
b
m
-0.0195f deg
−2
c
m
0.051f deg
−1
d
m
-0.206f deg
−1
where f is the power-dependent deg to rad conversion
operator.
4.1 Quasi-LPV Model of a Missile
The nonlinear model of the missile reads
˙
α = K
α
MC
n
(α,δ, M)cos(α) + q
˙q = K
q
M
2
C
m
(α,δ, M)
(23)
with the aerodynamic coefficients
C
n
(α,δ, M) = α(a
n
|
α
|
2
+ b
n
|
α
|
+ c
n
(2 −
M
3
))
+ d
n
δ
C
m
(α,δ, M) = α(a
m
|
α
|
2
+ b
m
|
α
|
+ c
m
(−7 +
8M
3
))
+ d
m
δ
(24)
and the measurement equation is
A
z
= K
z
M
2
C
n
(α,δ, M) (25)
One common way to recover an LPV model from
the missile is to select the scheduling variables θ =
(α,M). However, the scheduling variables do not
enter the state space matrices linearly preventing the
adoption of polytopic LPV techniques. The usual way
therefore is to create a grid in the parameter space and
design controllers at those specific operating points.
On the other hand, polytopic LPV allows for desir-
able qualities, like asymptotic stability over the en-
tire polytope region as long as the edge closed-loop
models are stable (Apkarian and Gahinet, 1995). We
may therefore choose the new scheduling variables as
θ = (α
2
,
|
α
|
) and use the approximation cos(α) ≈ 1
for small angles. Moreover, the dependence on M
may remain frozen at a single value and the same
design procedure can be performed over a grid over
the feasible parameter range. In real-time, traditional
gain scheduling can be adopted, leading to the quasi-
LPV model
˙
α
˙q
=
K
α
M p
n
1
K
q
M
2
p
m
0
α
q
+
K
α
Md
n
K
q
M
2
d
m
δ
A
z
q
=
K
z
M
2
p
n
0
0 1
α
q
+
K
z
M
2
d
n
0
δ
(26)
with the shorthands
p
n
:
= a
n
θ
1
+ b
n
θ
2
+ c
n
(2 −
M
3
)
p
m
:
= a
m
θ
1
+ b
m
θ
2
+ c
m
(−7 +
8M
3
)
(27)
Note, that for the current paper, actuator dynamics
character is not considered, but a general saturation
for the fin deflection is set at ±40 deg.
Remark 2. The new scheduling variables bear the
burden of conservative parameter layout design due
to the coupling between them. In other words, to hide
the nonlinear character of the missile model, we have
to add an extra dimension to the variable vector (Fig-
ure 1). To offset this, the proposed method helps to
reduce the weight of the infeasible parameter region.
Remark 3. Since the state α is not available as a
measured variable, we have to estimate it. For the
sake of this paper, estimation was modelled with a
second-order lowpass filter.
Figure 2 presents the extended model structure
with weights.
Figure 2: Augmented closed-loop control structure with
synthesis weights.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
508
There is a good case to be made for the inclusion
of these weights in the optimization vector η but for
demonstrative purposes, they were kept frozen at
W
re f
=
200(−0.05s + 1)
0.7s
2
+ 19.2s + 200
, Act = 1,
W
δ
=
s
0.01s + 10
,
W
e
=
10(s + 1)
8s + 0.1
, W
n1
= W
n2
= 0.001.
(28)
4.2 Optimizing Missile Polytope
Parameters
Parameter boundaries were preset as θ
1
= [0 0.09]
rad
2
and θ
2
= [0 0.3] rad. For ease, the maximum
number of subsegments was set at 9. The optimiza-
tion process was terminated after 15 generations and
the optimized scheduling variable boundaries were
found to be
θ
1
= [0 0.016 0.063 0.09]
θ
2
= [0 0.11 0.21 0.3]
The objective function (22) was slightly modified for
better tunability by the addition of a constant in the
optimization vector η on the individual edge con-
trollers. These can then be set optimally so that the
tuning weights can be kept frozen throughout the en-
tire process. It is to be noted though, that a more com-
prehensive solution would be to include actuator input
and error weight transfer function terms in the vec-
tor η. Controller design based on (15) was nested in
the genetic algorithm framework. The resulting LPV
controllers are then selected and subsequently gain-
scheduled based on the scheduling variable vector in
real time.
5 SIMULATIONS
Every step of the calculations was implemented in
Matlab/Simulink with a sampling time of 1 ms. The
actuator effort was set to an equal average power in all
cases. Vertical acceleration control is demonstrated
on a step manoeuvre. For reference, a standard PID
controller and a regular polytopic LPV controller are
given.
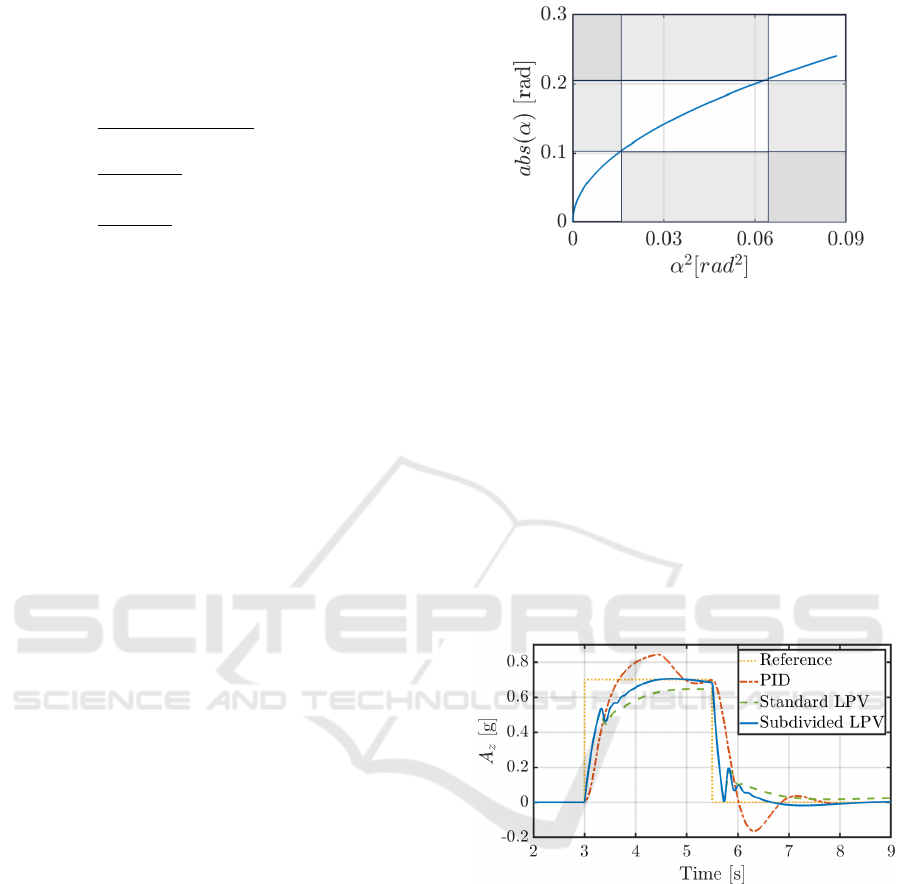
Figure 3 gives a visual representation of the op-
timized parameter boundaries for 9 regions and the
corresponding parameter trajectories.
Figure 3: Optimized polytopic subsegments with actual
scheduling variable trajectory. The colours denote the
weighting of each subsegment (darker - less weight)).
It is easy to see that the darker areas are outside
of interest with respect to the parameter trajectory.
A standard LPV controller weights the overall edge
controllers without consideration of the actual values
of the parameter vector while the proposed method
can efficiently exclude those controllers and automat-
ically deploy the controllers more closely related to
the actual operating point.
Figure 4 presents a comparison between standard
LPV and the proposed approach for a typical vertical
acceleration reference series.
Figure 4: Comparison of controllers in a series of step input
reference tracking task.
Since the PID is a linear controller and the missile
is nonlinear, it is no wonder, that the PID has con-
siderably lesser performance. The standard LPV on
the other hand shows much better behaviour but the
proposed partitioned controller can surpass its perfor-
mance due to the reduced conservatism.
In Figure 5 the vertical acceleration in relation to
the angle of attack is presented for a series of step
inputs in different directions.
Optimal Segmentation of LPV Systems for Control Applications via Genetic Algorithms
509
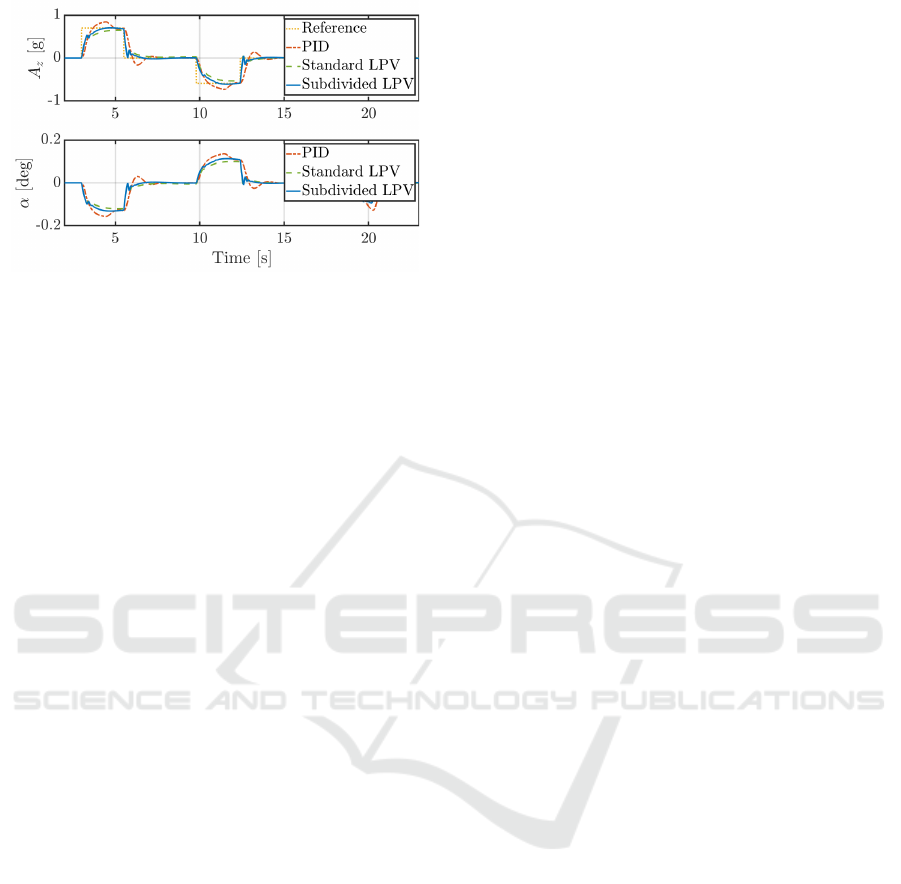
Figure 5: Vertical acceleration and corresponding angle of
attack.
6 CONCLUSIONS
The proposed method demonstrates an automatic de-
cision method for polytopic LPV parameter range
subdivision. The results of the paper showed that con-
troller performance can be significantly improved by
reducing the allowable operating region. Moreover,
an example was given for a missile control problem
otherwise not well-suited for the polytopic control
framework. As a future field of study, further investi-
gation into the optimization process might be worth-
while and also, a deeper inspection of several nonlin-
ear models is needed to map the possible modification
requisites and potential improvement options related
to individual classes of systems.
REFERENCES
Apkarian, P. and Gahinet, P. (1995). A convex characteriza-
tion of gain-scheduled h∞ controllers. Automatic Con-
trol, IEEE Transactions on Automatic Control, 40:853
– 864.
Apkarian, P., Gahinet, P., and Becker, G. (1995). Self-
scheduled h∞ control of linear parameter-varying sys-
tems: a design example. Automatica, 31(9):1251–
1261.
Das, A. and Heiland, J. (2023). Low-order linear param-
eter varying approximations for nonlinear controller
design for flows.
Deep, K., Singh, K. P., Kansal, M., and Mohan, C. (2009).
A real coded genetic algorithm for solving integer and
mixed integer optimization problems. Applied Math-
ematics and Computation, 212(2):505–518.
Do, A., Sename, O., Dugard, L., and Soualmi, B. (2011).
Multi-objective optimization by genetic algorithms
in h
∞
/lpv control of semi-active suspension. IFAC
Proceedings Volumes, 44(1):7162–7167. 18th IFAC
World Congress.
Gahinet, P. and Apkarian, P. (1994). A linear matrix in-
equality approach to h∞ control. International Jour-
nal of Robust and Nonlinear Control, 4(4):421–448.
Gahinet, P., Apkarian, P., and Chilali, M. (1996). Affine
parameter-dependent lyapunov functions and real
parametric uncertainty. IEEE Transactions on Auto-
matic Control, 41:436 – 442.
Huang, B., Lu, B., Li, Q., and Tong, Y. (2021). Average
dwell time based smooth switching linear parameter-
varying proportional-integral-derivative control for an
f-16 aircraft. IEEE Access, 9:30979–30992.
Jiang, W., Dong, C., and Wang, Q. (2015). A systematic
method of smooth switching lpv controllers design for
a morphing aircraft. Chinese Journal of Aeronautics,
28(6):1640–1649.
Kramer, O. (2017). Genetic Algorithm Essentials.
Kruszewski, A., Sala, A., Guerra, T. M., and Ari
˜
No, C.
(2009). A triangulation approach to asymptotically
exact conditions for fuzzy summations. IEEE Trans-
actions on Fuzzy Systems, 17(5):985–994.
Kwiatkowski, A. and Werner, H. (2008). Pca-based parame-
ter set mappings for lpv models with fewer parameters
and less overbounding. Control Systems Technology,
IEEE Transactions on, 16:781 – 788.
Lu, B. and Wu, F. (2004). Control design of switched
lpv systems using multiple parameter-dependent lya-
punov functions. In Proceedings of the 2004 Ameri-
can Control Conference, volume 4, pages 3875–3880
vol.4.
Marler, R. and Arora, J. (2004). Survey of multi-objective
optimization methods for engineering. Structural and
Multidisciplinary Optimization, 26:369–395.
Ohtake, H., Tanaka, K., and Wang, H. (2001). Fuzzy mod-
eling via sector nonlinearity concept. In Proceed-
ings Joint 9th IFSA World Congress and 20th NAFIPS
International Conference (Cat. No. 01TH8569), vol-
ume 1, pages 127–132.
Robert, D., Sename, O., and Simon, D. (2007). A reduced
polytopic lpv synthesis for a sampling varying con-
troller: Experimentation with a t inverted pendulum.
In 2007 European Control Conference (ECC), pages
4316–4323.
Scherer, C. (2001). Lpv control and full block multipliers.
Automatica, 37(3):361–375.
Shamma, J. and Cloutiert, J. (1993). Gain-scheduled missile
autopilot design using linear parameter varying trans-
formation. Journal of Guidance Control and Dynam-
ics - J GUID CONTROL DYNAM, 16:256–263.
Tan, W., Packard, A., and Balas, G. (2000). Quasi-lpv mod-
eling and lpv control of a generic missile. In Proceed-
ings of the 2000 American Control Conference. ACC
(IEEE Cat. No.00CH36334), volume 5, pages 3692–
3696 vol.5.
Wu, F., Packard, A., and Balas, G. (1995). Lpv control de-
sign for pitch-axis missile autopilots. In Proceedings
of 1995 34th IEEE Conference on Decision and Con-
trol, volume 1, pages 188–193 vol.1.
Yan, P. and
¨
Ozbay, H. (2007). On switching h
∞
controllers
for a class of linear parameter varying systems. Sys-
tems & Control Letters, 56(7):504–511.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
510
