
A New Observer-Based Fault Tolerant Shared Control for SbW Systems
with Actuator Fault for Driver Assistance
Mohammed Boudaoud
1,2
, Chouki Sentouh
1,3
, Cindy Cappelle
2
, Maan El Badaoui El Najjar
2
and Jean-Christophe Popieul
1,3
1
LAMIH UMR CNRS 8201, Universit
´
e Polytechnique Hauts-de-France, Valenciennes, France
2
Univ. Lille, CNRS, Centrale Lille, UMR 9189 CRIStAL, F-59000 Lille, France
3
INSA Hauts-de-France, Valenciennes, France
Keywords:
SbW System, Fault-Tolerant Control, Fault Estimation, Observer, Shared Control, Lane Keeping Systems,
T-S Fuzzy Models, LPV System.
Abstract:
This paper addresses the problem of fault tolerant shared control (FTSC) of Steer-by-Wire (SbW) systems
with actuator fault for driver lane keeping assistance system. The main contribution of this work is to propose
a novel co-design of a robust adaptive simultaneous estimation of system state and actuator faults associated
with an adaptive control law for the stability purposes and also to ensure lane keeping performance even
in faulty situations by limiting the influence of actuator faults on the vehicle trajectory. An LPV observer
architecture is proposed to estimate the vehicle state and unknown actuator faults considering real-time un-
measurable variations in longitudinal and lateral velocities, represented within a polytope with finite vertices.
Subsequently, a robust and adaptive state feedback active fault-tolerant controller is proposed using the Takagi-
Sugeno (T-S) approach. An optimization problem is formulated in terms of linear matrix inequalities (LMI)
to guarantee system stability and the asymptotic convergence of state and fault estimation errors. Lyapunov
stability arguments are used to allow more relaxation and additional robustness against immeasurable nonlin-
earities. Hardware validation carried out with the SHERPA dynamic car simulator in real driving situations
demonstrated the performance and the effectiveness of the proposed FTSC scheme.
1 INTRODUCTION
The integration of computers and electronics into
modern vehicles has paved the way for innovations
such as electric vehicles (EVs) equipped with Steer-
by-Wire (SbW) systems. These systems present
unique advantages over traditional mechanical steer-
ing systems by eliminating the mechanical linkage be-
tween the steering wheel and the front wheels. In-
stead, SbW systems use two motors and an electronic
control unit (ECU) to generate feedback torque and
steering angle, coupled with sensors that measure the
driver’s steering input and the front wheel angle. The
ECU processes the electronic signals from these sen-
sors and translates them into mechanical motion (Al-
tby and Majdanzic, 2014). Before the commercial-
ization of SbW systems can proceed, two of the most
pressing issues that must be resolved are maintain-
ing reliability and fault-tolerance capabilities. Sensor
faults in autonomous vehicles can result in a partial or
complete loss of critical information needed to per-
form driving tasks. In contrast, actuator failures can
cause a total loss of vehicle control, leading to inef-
fective or unstable maneuvers with potentially catas-
trophic consequences (Sentouh et al., 2024).
When an actuator motor suddenly fails, it becomes
difficult for the driver to maintain the same steering
behavior as before, potentially causing the vehicle to
deviate from its intended lane. In such situations, the
driver must exert considerable effort to keep the vehi-
cle on course and ensure its stability through manual
steering operations. This research aims to support the
driver’s steering actions and enhance the performance
and fault-tolerance capabilities of the SbW system,
especially during actuator failures. Hence, actuator
faults detection and compensation schemes ensuring
that the system remains operational even when fail-
ures occur, play an important role in achieving the re-
liability of SbW system. In the literature, many stud-
ies have been reported on fault detection and isolation
(FDI), fault diagnosis (FD), and fault-tolerant con-
trol (FTC) to address these concerns (Zinoune et al.,
Boudaoud, M., Sentouh, C., Cappelle, C., El Najjar, M. B. and Popieul, J.-C.
A New Observer-Based Fault Tolerant Shared Control for SbW Systems with Actuator Fault for Driver Assistance.
DOI: 10.5220/0013069800003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 189-197
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
189

2015) (Kommuri et al., 2016) (Xiong et al., 2019)
(Khelladi et al., 2020) (Abbaspour et al., 2020).
Substantial research has been conducted on fault-
tolerant control (FTC) of SbW systems with actuator
or sensor failures. FTC systems can be categorized
into active FTC systems (AFTCS) and passive FTC
systems (PFTCS). Active FTC systems react to fail-
ures through a reconfiguration mechanism, adapting
the control system based on real-time fault informa-
tion from an FDI scheme. In contrast, passive FTC
systems assume a predefined set of potential malfunc-
tions known a priori and do not require an FDI scheme
or controller reconfiguration. The goal of a passive
FTC design is to synthesize a single fixed controller
that makes the closed-loop system as insensitive as
possible to these predefined faults. Reliable passive
FTC of an autonomous electric vehicle affected by
front wheel steering actuator faults was proposed in
(Chen et al., 2019) for path following. A robust H
∞
fault-tolerant observer-based PID path tracking con-
trol strategies have been developed to integrate both
actuator and sensor faults as well as control saturation
is proposed in (Chen et al., 2024).
Despite these advances, passive FTC systems of-
ten struggle to achieve optimal performance under
varying fault conditions compared to active FTC sys-
tems. Most work on SbW FTC systems has fo-
cused on active approaches, where FDI plays a vi-
tal role in providing information about faults, en-
abling corresponding actions to eliminate or mini-
mize their effects and maintain overall system per-
formance. FDI aims to monitor the system, identify
faults as they occur, and pinpoint their type and loca-
tion. Two fundamental analytical redundancy-based
approaches for FDI are residual-based FDI and fault
estimation-based FDI. Residual-based FDI methods
generate residuals, the difference between measured
and calculated variables, which have a nominal zero
mean value under normal conditions. Common resid-
ual generation methods for SbW systems include un-
known input observers (dos Santos et al., 2016), slid-
ing mode observers (Anwar and Niu, 2014), Kalman
filters (Gadda, 2009), and interval observers (Ifqir
et al., 2019). However, residual methods do not pro-
vide direct information about the fault itself. In con-
trast, observer-based fault estimation techniques use
observers to estimate faults directly, providing infor-
mation on their size, severity, and nature. By using
the fault estimation dynamics, the controller can be
designed to compensate for the effect of the fault.
Two stage Kalman filter is presented in (Huang et al.,
2021) to estimate state and efficiency loss factor sim-
ulaniously in the presence of front wheel actuator
fault and based on the fault information the MPC-
based reconfigurable controller replaces the old fault-
free model with a new faulty model to maintain ve-
hicle stability and steering tracking performance. In
(Zhao et al., 2020), through the forgetting factor re-
cursive least squares (FFRLS) algorithm, the state
and the partial damage degree of the motor are trans-
ferred to ECU then they propose an individual aux-
iliary and fault-tolerant control considering different
drivers steering characteristics in the case of actua-
tor fault. An interval observer is used to estimate
the actuator fault as though as if it were another (un-
measurable) state of the system in (Lamouchi et al.,
2022). Adaptive fault diagnosis observer (AFDO) ap-
proaches have also gained attention for their ability to
estimate both the state vector and actuator fault vector
simultaneously (Jiang et al., 2006)(Wang and Daley,
1996)(Zhang et al., 2008). A fuzzy fast adaptive fault
estimation (FAFE) algorithm for T-S fuzzy nonlinear
systems is proposed in (Zhang et al., 2009)(Zhang
et al., 2008).
The aforementioned works offer valuable insights
and solutions, primarily focus on the quadratic ap-
proach to study the asymptotic convergence of the
system and the observer separately. However, they
do not address the robust co-design needed to achieve
simultaneously an adaptive fault estimation (FE) and
FTC strategy.
In this paper, we focus on the front wheel subsys-
tem of the SbW system to assist the driver in faulty
situation. The main objective is to utilize the steering
command to reduce the physical steering workload of
the driver during faulty steering actuator situations.
One of the main challenges we address is providing a
natural and a smoother transition mode by offering
fault-tolerant shared control between the controller
and the driver, especially in cases where the actuators
fail. When the steering actuator suddenly fails, it is
difficult for the driver to maintain the steering behav-
ior, which can lead to a vehicle lateral deviation from
its desired lane. The driver then must exert consider-
able effort to keep the vehicle in the lane and ensure
the vehicle stability through steering operations.
Under these conditions of steering motor failure,
the purpose of this work is to propose a novel co-
design to achieve both adaptive fault estimation (FE)
and fault-tolerant control (FTC) strategy. For that, a
robust adaptive observer for simultaneous state and
actuator fault estimation is combined with an adap-
tive feedback control to guarantee the observer-based
fault-tolerant system stability while ensuring the lane
keeping performance by restricting the impact of ac-
tuators’ faults on the vehicle trajectory.
The remainder of the paper is structured as fol-
lows. The vehicle system modeling is given in
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
190

Figure 1: Bicycle model for lateral dynamics.
Sec.2. Sec.3 presents the representation of this model
through the T-S fuzzy model. Then, the adaptive ob-
server design is given in Sec. 4 while Sec.5 presents
the proposed fault-tolerant shared control and the
closed-loop stability. Finally, the experimental vali-
dation are discussed in Ses.6.
2 VEHICLE SYSTEM MODELING
NOMENCLATURE
m Mass of vehicle [kg]
I
z
Yaw inertia
kg.m
2
v
y
,v
x
Lateral and longitudinal velocity [m/s]
F
y f
,F
yr
Front/rear wheels lateral tire forces [N]
C
y
Lateral aerodynamic drag coefficient[Kg/m]
F
x f
Front wheels longitudinal tire forces [N]
δ
f
Steering wheel angle [rad]
F
w
Crosswinds force [N]
ψ
L
Heading error [rad]
y
L
Lateral position error [m]
ρ
c
Road curvature [m
−1
]
C
α
f
,C
α
r
Front/rear cornering stiffness [N/rad]
α
f
,α
r
Front/rear side slip angle [rad]
˙
ψ Yaw rate [rad/s]
l
f
,l
r
Distance from COG to front and rear axles [m]
2.1 Lateral Dynamic Model
In this section, we explore the modeling of vehicle
lateral motion by considering the non-linear dynam-
ics of a bicycle model. The vehicle is modeled as a
symmetric single-track bicycle in a fixed frame with
six degrees of freedom (6 DoF). Neglecting roll and
pitch motions, the left and right wheels at each axle
are combined into a single equivalent tire as described
by (Rajamani, 2011) and illustrated in Fig.1. The lat-
eral dynamics of the vehicle, characterized by vari-
ations in lateral speed v
y
and yaw rate
˙
ψ, are repre-
sented by the following equations:
m ˙v
y
= F
x f
sin(δ
f
) + F
y f
cos(δ
f
) + F
yr
− mv
x
˙
ψ −C
y
v
2
y
+F
w
I
z
¨
ψ = l
f
F
y f
cos(δ
f
) − l
r
F
yr
+ l
f
F
x f
sin(δ
f
) + l
w
F
w
(1)
2.2 Tire Force Dynamics
Most tire models used in the literature primarily con-
sider a small values of the slip ratio λ and the slip
angle α and maintain the tire behavior within the lin-
ear zone (Rajamani, 2011). Thus, the longitudinal and
lateral forces of the front and rear tires are expressed
as:
F
y
f ,r
= C
α
f ,r
α
f ,r
F
x
f ,r
= C
λ
f ,r
λ
f ,r
(2)
Although this model describes static behavior, the
elastic deformation of tires introduces a transient be-
havior. To account for this transient behavior, some
literature incorporates a first-order low-pass filter dy-
namics (
σ
t
v
x
), as described in (Vantsevich and Gray,
2015) and (Rajamani, 2011) where σ
t
is the time con-
stant. So, the tire-ground forces are then dynamically
modeled as:
(
˙
F
y
f ,r
= −
v
x
σ
t
F
y
f ,r
+
v
x
σ
t
C
α
f ,r
α
f ,r
˙
F
x
f ,r
= −
v
x
σ
t
F
x
f ,r
+
v
x
σ
t
C
λ
f ,r
λ
f ,r
(3)
2.3 Lateral Positioning
To ensure effective lane keeping when control is
shared between the driver and the system, it is es-
sential to minimize the lateral position error y
L
and
the heading error ψ
L
at a lookahead distance l
p
. The
dynamics of these two errors are given by (Sentouh
et al., 2018):
˙
ψ
L
=
˙
ψ − ρ
c
v
x
˙y
L
= v
y
+ l
p
˙
ψ + ψ
L
v
x
(4)
3 T-S FUZZY MODELING OF
VEHICLE DYNAMICS
3.1 Actuator Faults
Actuator faults in the vehicular system can be addi-
tive or multiplicative, as shown in Tab.1. The faulty
control input to the system can be defined as f
a
(t) =
(I
n
u
− ρ
a
)u(t) for given feedback control u(t). This
fault can be easily rewritten as an external additive
signal (u(t) + f
a
(t)) where f
a
(t) = −ρ
a
u(t).
3.2 T-S Model Formulation in the
Presence of Actuator Faults
Note that the system nonlinearity is caused by the
variation of longitudinal and lateral velocities. These
A New Observer-Based Fault Tolerant Shared Control for SbW Systems with Actuator Fault for Driver Assistance
191

Table 1: Actuator faults.
Fault Kind Conditions Fault Name
Additive if f
a
i
constant Bias
u
i
(t)+ f
a
i
(t) if f
a
i
= λ
i
t, Drift
0 < λ ≪ 1
Multiplicative if ρ
a
i
= 1 Totally effective
ρ
a
i
u
i
(t) if ρ
a
i
= 0 Totally loss
if 0 < ρ
a
i
(t) ≤ 1 Loss of
for all t effectiveness
variations are treated as premise parameters (q = 2)
and transformed into T-S representation by the upper
and lower bounds using the sector nonlinearity con-
cept (Tanaka and Wang, 2004) with r = 2
q
= 4 sub-
models weighted by membership functions η
i
(θ). By
assuming a small variation of the steering angle under
normal driving conditions, a continuous LPV road-
vehicle system with actuator faults can be described
from Eq.(1)(3)(4) by the following state-space equa-
tions:
˙x(t) = A(θ)x(t) + B(θ)u(t) + d(θ)w(t) + E(θ) f
a
(t)
y(t) = Cx(t)
(5)
where x =
v
y
˙
ψ F
y f
F
yr
ψ
L
y
L
⊤
is
the state space vector, u =
δ
f
⊤
is the control in-
put for the SbW system, y =
˙
ψ a
y
ψ
L
y
L
⊤
is
the output vector. Whereas w =
f
w
ρ
c
⊤
is the
disturbance vector. f
a
(t) represent the actuator faults.
Since we consider only the steering angle as a control
input then E(θ) = B(θ) and the state space equation
(5) can be written as:
˙x(t) = A(θ)x(t) + B(θ)(u(t) + f
a
(t)) + d(θ)w(t)
y(t) = Cx(t)
(6)
Note that the system matrices A(θ), B(θ), d(θ)
and E(θ) in (5) explicitly depend on the premise
variables vector θ given as:
θ = {v
x
, v
y
}, q = 2 (7)
It is assumed that θ is bounded and also included in a
convex polytopic domain of vertices such that:
Θ = {θ(t) ∈ R
r
| v
x
∈ [v
min
x
, v
max
x
]; v
y
∈ [v
min
y
, v
max
y
]}
(8)
Where v
min
x
and v
max
x
(respectively v
min
y
and v
max
y
) are
known lower and upper bounds on longitudinal and
lateral speeds. Considering the time-varying matrices
S ∈ {A, B, d, E} in (5), and using the sector nonlin-
earity approach in (Tanaka and Wang, 2004), we can
derive the following polytopic LPV representation of
model (5) with :
S =
r
∑
i=0
η
i
(θ)S
i
(9)
Where S
i
∈ {A
i
, B
i
, d
i
, E
i
} are constant for all i ∈
[0,...,r]. The variable r = 2
q
represents the number
of local sub-models, with the q non-linearities related
to θ ∈ Θ captured via membership weighting func-
tions η
i
(θ). The membership functions adhere to the
convex-sum property within the compact set of the
state space:
∑
r
i=0
η
i
(θ) = 1,
∑
r
i=0
˙
η
i
(θ) = 0, η
i
∈ [0 1]
∀i = {1, 2,..., r}
(10)
4 ADAPTIVE LPV-TS OBSERVER
FOR STATE AND FAULT
ESTIMATION
In this section, we are interested to propose an adap-
tive LPV-TS observer to estimate the system state and
detect the actuator fault at the same time. For this
purpose, the following assumptions must be verified
Assumption 1. The triples (A,B,C) are controllable
and observable to guarantee the LMI solution.
Assumption 2. The matching condition for the faults
hold
rank(CB
i
) = rank(B
i
) (11)
Assumption 3. The faults f
a
(t) are assumed to be a
time varying signal, and have a norm-bounded first-
time derivative.
∥
˙
f
a
(t) ∥≤ f
a
max
, 0 ≤ f
a
max
≤ ∞
(12)
Motivated by the adaptive observer proposed in
(Zhang et al., 2009) and (Sentouh et al., 2024), an
adaptive Luenberger nonlinear observer for a vehi-
cle equipped with SbW system considering actuator
faults (5) is proposed as:
˙
ˆx(t) = A(θ) ˆx(t) + B(θ)(u(t) +
ˆ
f
a
(t)) + d(θ)w(t)
+ L( ˆy(t) − y(t))
ˆy(t) = C ˆx(t)
˙
ˆ
f
a
(t) = ΓH(˙e
y
− σe
y
)
(13)
Where ˆx ∈ R
n
is the observer state vector, ˆy ∈ R
m
is the observer output vector, L ∈ R
n×m
and H ∈ R
f ×m
are the observer gain matrices, and
ˆ
f ∈ R
f
is the esti-
mated fault vector which depends on the output error
vector e
y
and its derivative. Note that the observer’s
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
192
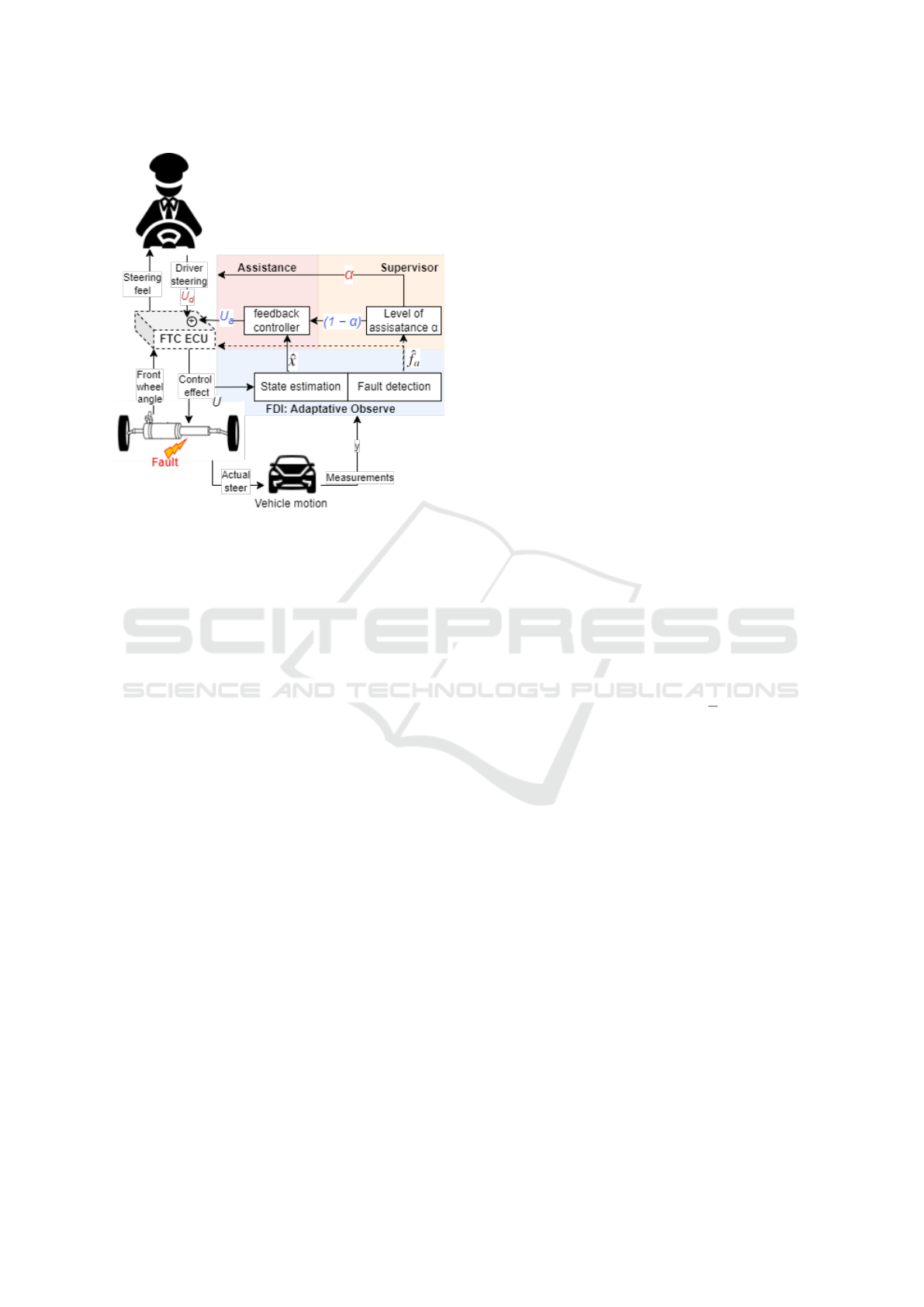
Figure 2: Driver assistance in SbW system with actuator
fault.
matrices L and H are parameter varying with the same
LPV form (9) and given by:
L =
r
∑
i=0
η
i
(θ)L
i
, H =
r
∑
i=0
η
i
(θ)H
i
(14)
This adaptive fault estimation algorithm can guar-
antee lim
t→∞
e
x
(t) = 0 and lim
t→∞
e
f
(t) = 0 where e
x
is the state estimation error and e
f
is the fault esti-
mation error, Γ ∈ R
f × f
is the learning rate and σ is a
tuning parameter.
5 FTC SHARED CONTROL FOR
ACUATOR FAULT
COMPENSATION
In this work, the objective is to compute a new shared
control law u(t) in order to compensate the effect of
the actuators’ faults and minimize the driver physical
steering workload as shown in the architecture Fig. 2.
for that, the FTC shared controller is given by:
u = αu
d
+ (1 − α)u
a
−
ˆ
f
a
(15)
Where u
d
is the driver steering angle and u
a
is the
feedback controller given by:
u
a
= −K ˆx (16)
Where the controller gain k is parameter varying with
the same LPV form (9) and given by
K =
r
∑
i=0
η
i
(θ)K
i
(17)
The purpose of the feedback controller u
a
is to as-
sist the driver in keeping the vehicle on the lane, espe-
cially when the actuator fails. To take into account the
lane-keeping performance, we define the performance
output of system (6) as:
y =
˙
ψ a
y
ψ
L
y
L
⊤
(18)
We define the following cost function:
J =
Z
∞
0
y
⊤
Qy + u
⊤
a
Ru
a
dt (19)
Where Q and R are two symmetric positive def-
inite matrices and are referred as the weighting ma-
trices. The automatic system can takes over the con-
trol of the vehicle (α = 0) when the actuator becomes
faulty. The SbW control reconfigures the fault toler-
ant controller for a good steering performance.
In the following, we present the robust co-design
conditions of adaptive fault estimation and FTSC
strategy expressed as an LMIs optimization problem.
The design process is based on a Lyapunov function,
which takes into account both the observer and the
system stability, as well as the lane keeping perfor-
mance and robustness against actuator faults and dis-
turbances. Considering the following polytopic Lya-
punov function defined by:
V (t) = x
⊤
(t)Px(t) + e
⊤
x
(t)P
e
e
x
(t) +
1
σ
e
⊤
f
(t)Γ
−1
e
f
(t)
(20)
Where P ∈ R
n×n
and P
e
∈ R
n×n
are symmetric positive
definite matrices.
In order to stabilize the vehicle system (6), as well
as the observer (13) and to guarantee an upper-bound
for the cost function (19) under zero-initial condition
we apply the following condition:
˙
V (t) + x
⊤
(t)Qx(t) + u
⊤
(t)Ru(t) ≤ γ f
⊤
a
f
a
+ γw
⊤
w
(21)
Where
˙
V (t) is the time-derivative of the Lyapunov
function (20) along the trajectory of (6).
Lemma 1. For every positive definite matrix G > 0
the following property holds (Fouka et al., 2021)
2e
⊤
f
Γ
−1
˙
f
a
≤ e
⊤
f
G +
˙
f
a
Γ
−1
G
−1
Γ
−1
˙
f
a
(22)
Using successively Schur complement lemma
(Boyd et al., 1994) and Lemma.1 with X = P
−1
,
M = KX and N = P
e
L it follows that we can obtain
the LMI optimization problem after some algebraic
A New Observer-Based Fault Tolerant Shared Control for SbW Systems with Actuator Fault for Driver Assistance
193

H
e
(AX −BM) X
⊤
C
⊤
M
⊤
0 B D 0 0 I
x
M
⊤
R
∗ −Q
−1
0 0 0 0 0 0 0 0
∗ ∗ −R
−1
0 0 0 0 0 0 0
∗ ∗ ∗ H
e
(P
e
A − NC) −
1
σ
(A
⊤
P
e
B −C
⊤
N
⊤
B − P
e
B) 0 P
e
D P
e
0 0
∗ ∗ ∗ ∗
1
σ
G 0
−B
⊤
P
e
D
σ
−B
⊤
P
e
σ
0 0
∗ ∗ ∗ ∗ ∗ −γ 0 0 0 0
∗ ∗ ∗ ∗ ∗ ∗ −εI
d
0 0 0
∗ ∗ ∗ ∗ ∗ ∗ ∗ −εI
x
0 0
∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ −εI
x
0
∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ −γ + R
< 0
(23)
manipulations as shown in the matrix at the top of
the next page (see Equation 23), with I
x
∈ R
n×n
and
I
d
∈ R
ω×ω
are identity matrix. γ, ε are positive scalars,
and the operator H
e
(A) = A
⊤
A . When the above con-
dition hold, the observer gain matrix is given by:
L = P
−1
e
N (24)
And the controller gain matrix is given by:
K = MX
−1
(25)
On the other hand, if the assumption rank(CB) =
rank(B) holds, it is possible to obtain matrices H such
that (see (Corless and Tu, 1998)):
HC = B
⊤
P
e
(26)
The control and observer co-design conditions ex-
pressed in terms of LMIs (23) are solved with
YALMIP toolbox and SeDuMi solver (Lofberg,
2004).
6 EXPERIMENTAL VALIDATION
The experimental validation involves the implemen-
tation in a SHERPA-LAMIH road vehicle dynamic
simulator as shown in Fig.3. Note that in this work,
the steering wheel feedback motor is controlled by a
PD regulator of the tracking error between the actual
steering wheel angle and front wheel angle to provide
the driver with the true feeling of the steering effort.
In this section, we explain our main results
through two use cases. The first one (Fig. 4 and Fig.
5), the human driver takes over the control authority
and undergoes a lane-keeping maneuver. During this
maneuver, time-varying fault signals for the steering
are generated to represent a varying degree of effi-
ciency loss in the actuator, as discussed in Section
3.1. These fault signals simulate real-world scenar-
ios where the steering system might not operate opti-
mally due to various reasons. Figure 4 illustrates the
observer performance, showing that the proposed ob-
server provides an accurate estimation of both the sys-
tem states and actuator faults accurately. This demon-
strates the robustness and reliability of the proposed
fault estimation approach.
The performance of the actuator fault compensa-
tion system are depicted in Figure 5, where the ve-
hicle dynamics behavior with and without the fault
compensation are compared to that of the normal driv-
ing condition (without faults). This figure highlights
the effectiveness of our compensation strategy in min-
imizing the impact of actuator faults during manual
driving. However, even though a driver can manipu-
late the steering wheel angle and correct the deviation
path through the compensation of the steering wheel
angle, he/she does not have a good understanding of
the driving situation and can deviate from the desired
lane.
In the second use case, we are interested by the
purpose of further assisting the steering behavior of
the driver especially during an actuator faults. Figures
6 and 7 show the main results of the FTC shared con-
trol. We performed a test by injecting an actuator fault
at time t = 30s as shown in Fig. 6. When the fault is
detected, the control is shared between the driver and
the system. Hence, driver authority decreases, and the
need for assistance increases by activating the weight-
ing decision parameter α for shared control to guar-
antee a smooth control transition between the driver
and the lane keeping assist system. We can observe
from Fig. 7 the good performance of the proposed
fault-tolerant shared control to maintain a lower vehi-
cle lateral deviation after the appearance of the actu-
ator fault. After activating the driving assistance dur-
ing the actuator fault compensation, the lateral posi-
tion error becomes smaller compared to the manual
driving mode with actuator fault compensation, en-
suring that the vehicle maintains its desired trajectory
and stability more efficiently even in the presence of
faults. The observed results clearly indicate that our
fault compensation mechanism can effectively restore
the vehicle’s positioning performance as the nominal
driving situation, thereby enhancing safety and relia-
bility.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
194
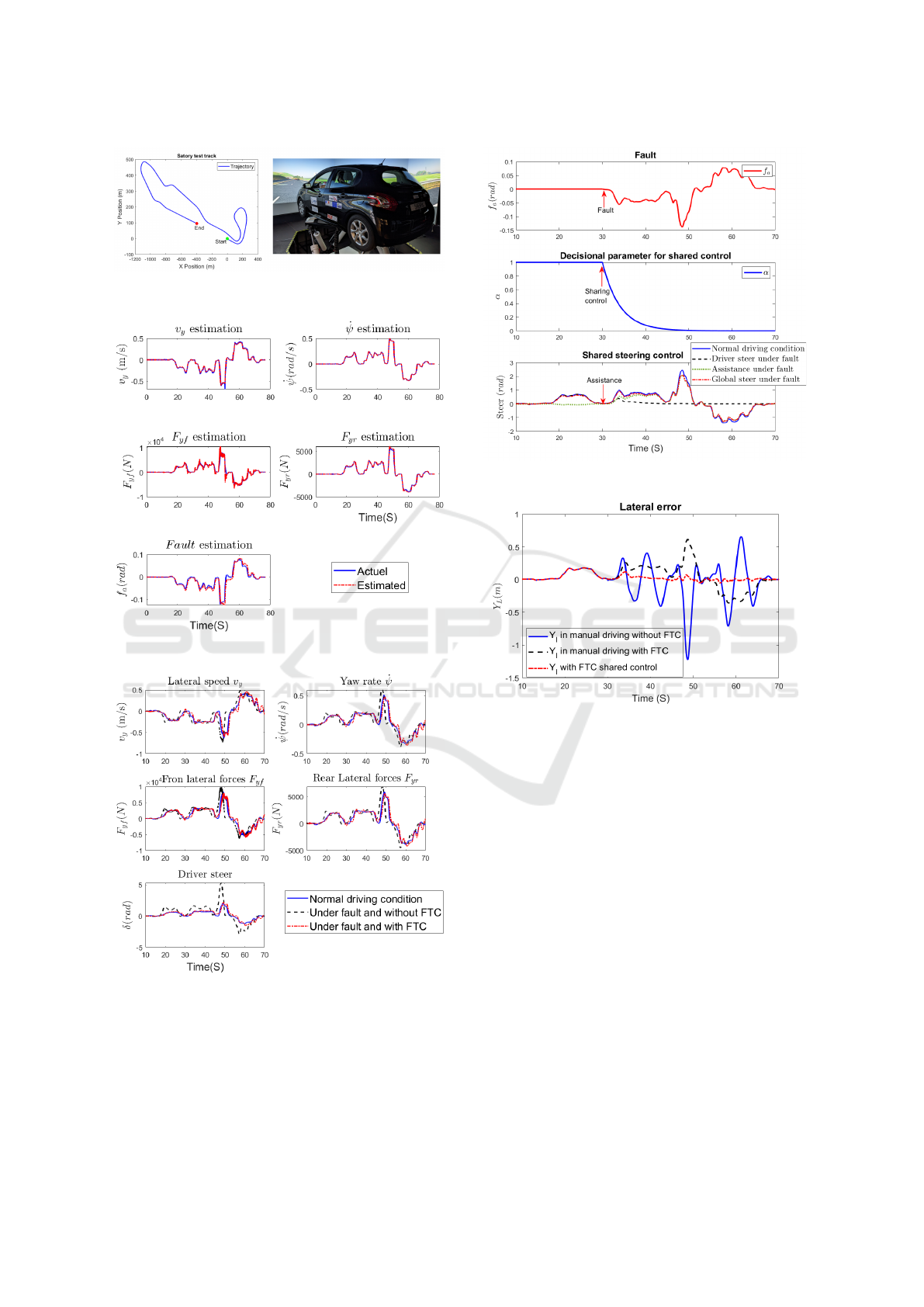
Figure 3: SHERPA dynamic driving simulator on the Satoty
test.
Figure 4: Observer performance: state and fault estimation.
Figure 5: FTC performance: Actuator Fault Compensation
in manual driving.
7 CONCLUSIONS
This paper proposed a new co-design of the observer-
based fault-tolerant shared control strategy of Steer-
Figure 6: FTC shared control.
Figure 7: FTC shared control performance: lateral error in
manual and assistance driving during actuator fault.
by-Wire (SbW) systems with actuator fault for driver
lane keeping assistance system. An LPV observer ar-
chitecture was proposed to estimate simultaneously
the vehicle state and unknown actuator faults con-
sidering real-time unmeasurable variations in longi-
tudinal and lateral velocities based on T-S represen-
tation with polytopic approach. Based on the Lya-
punov stability arguments, the system stability and
the asymptotic convergence of state and fault estima-
tion errors has been proved. The control and observer
co-design conditions have been obtained through an
optimization problem which is formulated in terms of
linear matrix inequalities (LMI). Experimental valida-
tion was performed using the LAMIH-SHERPA dy-
namic car simulator in real driving situations. The
experimental results showed that the LPV observer
provides an accurate estimation of both the vehicle
state and actuator faults. On the other hand, the fault-
tolerant controller effectively minimizes the impact of
such faults, where the shared control mechanism al-
A New Observer-Based Fault Tolerant Shared Control for SbW Systems with Actuator Fault for Driver Assistance
195

lows to guarantee a smooth control transition between
the driver and the lane keeping assist system, which
enhance safety and system reliability. The obtained
results demonstrated the performance and the effec-
tiveness of the proposed FTSC strategy.
8 FUTURE WORK
In this work, we addressed the issue of loss of actuator
effectiveness as a fault. Our control system strategy is
effective in cases of additive or multiplicative faults
with a loss of actuator efficiency of up to 90%. How-
ever, we did not consider scenarios where the nature
of the fault changes or there is a total loss of the actu-
ator. Investigating these scenarios will be the focus of
our future work.
REFERENCES
Abbaspour, A., Mokhtari, S., Sargolzaei, A., and Yen, K. K.
(2020). A survey on active fault-tolerant control sys-
tems. Electronics, 9(9):1513.
Altby, A. and Majdanzic, D. (2014). Design and implemen-
tation of a fault-tolerant drive-by-wire system.
Anwar, S. and Niu, W. (2014). A nonlinear observer based
analytical redundancy for predictive fault tolerant con-
trol of a steer-by-wire system. Asian Journal of Con-
trol, 16(2):321–334.
Boyd, S., El Ghaoui, L., Feron, E., and Balakrishnan, V.
(1994). Linear matrix inequalities in system and con-
trol theory. SIAM.
Chen, B.-S., Liu, H.-T., and Wu, R.-S. (2024). Robust $
h \infty $ fault-tolerant observer-based pid path track-
ing control of autonomous ground vehicle with control
saturation. IEEE Open Journal of Vehicular Technol-
ogy.
Chen, T., Chen, L., Xu, X., Cai, Y., Jiang, H., and Sun, X.
(2019). Passive fault-tolerant path following control
of autonomous distributed drive electric vehicle con-
sidering steering system fault. Mechanical Systems
and Signal Processing, 123:298–315.
Corless, M. and Tu, J. (1998). State and input estimation for
a class of uncertain systems. Automatica, 34(6):757–
764.
dos Santos, B., Lopes, A., and Ara
´
ujo, R. E. (2016). Fault
detection scheme for a road vehicle with four indepen-
dent single-wheel electric motors and steer-by-wire
system. In Advanced Vehicle Control, pages 417–422.
CRC Press.
Fouka, M., Nehaoua, L., and Arioui, H. (2021). Motorcy-
cle state estimation and tire cornering stiffness identi-
fication applied to road safety: Using observer-based
identifiers. IEEE Transactions on Intelligent Trans-
portation Systems, 23(7):7017–7027.
Gadda, C. D. (2009). Optimal fault-detection filter design
for steer-by-wire vehicles. Stanford University.
Huang, C., Huang, H., Naghdy, F., Du, H., and Ma,
D. (2021). Actuator fault tolerant control for steer-
by-wire systems. International Journal of Control,
94(11):3123–3134.
Ifqir, S., Dalil, I., Na
¨
ıma, A.-O., and Sa
¨
ıd, M. (2019). Adap-
tive threshold generation for vehicle fault detection
using switched t–s interval observers. IEEE Trans-
actions on Industrial Electronics, 67(6):5030–5040.
Jiang, B., Staroswiecki, M., and Cocquempot, V. (2006).
Fault accommodation for nonlinear dynamic sys-
tems. IEEE Transactions on automatic Control,
51(9):1578–1583.
Khelladi, F., Boudali, M., Orjuela, R., Cassaro, M., Bas-
set, M., and Roos, C. (2020). An emergency hierar-
chical guidance control strategy for autonomous vehi-
cles. IEEE Transactions on Intelligent Transportation
Systems, 23(5):4319–4330.
Kommuri, S. K., Defoort, M., Karimi, H. R., and Veluvolu,
K. C. (2016). A robust observer-based sensor fault-
tolerant control for pmsm in electric vehicles. IEEE
Transactions on Industrial Electronics, 63(12):7671–
7681.
Lamouchi, R., Raissi, T., Amairi, M., and Aoun, M. (2022).
On interval observer design for active fault tolerant
control of linear parameter-varying systems. Systems
& Control Letters, 164:105218.
Lofberg, J. (2004). Yalmip: A toolbox for modeling and op-
timization in matlab. In 2004 IEEE international con-
ference on robotics and automation (IEEE Cat. No.
04CH37508), pages 284–289. IEEE.
Rajamani, R. (2011). Vehicle dynamics and control.
Springer Science & Business Media.
Sentouh, C., Fouka, M., Rath, J. J., and Popieul, J.-C.
(2024). Adaptive observer-based output feedback ftc
for nonlinear interconnected vehicle dynamics with
unknown actuator faults. IEEE Transactions on In-
telligent Vehicles, pages 1–11.
Sentouh, C., Nguyen, A.-T., Benloucif, M. A., and Popieul,
J.-C. (2018). Driver-automation cooperation oriented
approach for shared control of lane keeping assist sys-
tems. IEEE Transactions on Control Systems Technol-
ogy, 27(5):1962–1978.
Tanaka, K. and Wang, H. O. (2004). Fuzzy control sys-
tems design and analysis: a linear matrix inequality
approach. John Wiley & Sons.
Vantsevich, V. V. and Gray, J. P. (2015). Relaxation length
review and time constant analysis for agile tire dy-
namics control. In International design engineering
technical conferences and computers and informa-
tion in engineering conference, volume 57106, page
V003T01A038. American Society of Mechanical En-
gineers.
Wang, H. and Daley, S. (1996). Actuator fault diagnosis: an
adaptive observer-based technique. IEEE transactions
on Automatic Control, 41(7):1073–1078.
Xiong, J., Cheong, J. W., Xiong, Z., Dempster, A. G., Tian,
S., and Wang, R. (2019). Integrity for multi-sensor
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
196

cooperative positioning. IEEE Transactions on Intel-
ligent Transportation Systems, 22(2):792–807.
Zhang, K., Jiang, B., and Cocquempot, V. (2008). Adap-
tive observer-based fast fault estimation. Interna-
tional Journal of Control, Automation, and Systems,
6(3):320–326.
Zhang, K., Jiang, B., and Shi, P. (2009). A new approach
to observer-based fault-tolerant controller design for
takagi-sugeno fuzzy systems with state delay. Cir-
cuits, Systems & Signal Processing, 28(5):679–697.
Zhao, W., Wang, A., Zou, S., and Zhang, H. (2020). In-
dividual auxiliary and fault-tolerant control of steer-
by-wire system considering different drivers steering
characteristics. IEEE/ASME Transactions on Mecha-
tronics, 26(3):1558–1569.
Zinoune, C., Bonnifait, P., and Iba
˜
nez-Guzm
´
an, J. (2015).
Sequential fdia for autonomous integrity monitor-
ing of navigation maps on board vehicles. IEEE
Transactions on Intelligent Transportation Systems,
17(1):143–155.
A New Observer-Based Fault Tolerant Shared Control for SbW Systems with Actuator Fault for Driver Assistance
197
