
Computing Bounds for the Synchronization Errors of Nonidentical
Nonlinear Oscillators with Time-Varying Diffusive Coupling
Tabea Trummel, Zonglin Liu
a
and Olaf Stursberg
b
Control and System Theory, EECS Dept., University of Kassel, Germany
Keywords:
Oscillators, Synchronization, Networked Systems, Reachable Sets, Limit Cycles.
Abstract:
The paper studies bounds of the synchronization error for networks of diffusively coupled and nonidentical
nonlinear oscillators. In contrast to preceding work, which only analyzes the synchronization error in the limit
and for constant coupling, a method based on over-approximating reachable sets of the synchronization error
is proposed. The method allows the evaluation of different and time-varying gains along the limit cycles.
Instead of using st rong coupling gains to preserve synchronization, it is proposed to vary the coupling gains
over time, while the synchronization error determined via reachable set does not exceed a specified bound.
Evaluation results for the proposed method are provided for different types of coupled oscillators.
1 INTRODUCTION
The synchronization of sets of oscillators has been in-
vestigated in context of several applications, such as
high-precision motion contro l (Xiao and Zhu, 2006),
power grids (Wang et al., 2 016), or in biological sys-
tems (Kim et al., 2019).
An essential point is to investigate in how far the
coupling strengths among the oscillators as well as the
interaction topology affects the synchronization error
over time. This error encodes (temporary or perma-
nent) deviation of the amplitudes (or phases) of the
oscillators. While for coupled identical linear oscilla-
tors, the dynam ic s of the synchronization error can be
expressed explicitly (Scardovi and Sepulchre, 2008),
the situation for sets of nonlin ear oscillators is more
involved, since the dynamics of the syn chronization
error cannot be co mputed in closed form. Existing
work can roughly be categorized in appro aches that
aim to seek sufficiently large static gains of diffusive
coupling to obtain convergen ce of the errors to zero
in th e limit, a nd to those where the coupling strength
is varied over time – this paper is focused on the latter
case.
Among th e existing approaches for this case,
(Zhao et al., 2012) determine time-varying coupling
gains by treating the error of nonidentical nonlin-
ear systems with Lyapunov-like functions. Although
a
https://orcid.org/0000-0002-0196-9476
b
https://orcid.org/0000-0002-9600-457X
bounded synchronization is guaranteed by the cou -
pling gains, the network structure is restricted to an
undirected form and the error is only considered in
the limit, potentially leading to conservatively large
gains. In the work by (Wang et al., 2011), the p roce-
dure is similar but o nly identical nonlin ear systems in
discrete time are consider ed. Also, (Zhu et al., 2020)
and (Panteley and Lor´ıa, 2017) u se the construction of
Lyapunov- like functions to synthe size coupling gains
bounding the error. The disadvantage of these ap-
proach e s is, apart from using possibly larger gains
than necessary for synchronizatio n, the lack of the
possibility to compute the evolution of the synchro-
nization error over time.
A different approach for bounded synch ronization
uses funnel control (Lee et al., 2022), where the syn-
chroniza tion error of nonidentical nonlinear systems
is forced to a specific bo und by different time-varying
coupling gains. However, the evolution of the error
over time is restricted by the funnel shape, i.e., it is
not possible to allow a larger synchronization error
for certain times if an application requires this. It is
not possible to check which e rror bounds arise fr om
given coupling gain s.
In contrast to the aforementioned approaches, the
method proposed in this paper offers the possibility to
(i) analyze if the synchronization error stays beyond
a certain threshold for given coupling gains, and ( ii)
to synthesize time-varying coupling gain s (possibly
different for any coupling of the network topology)
while maintaining a chosen error bound. The syn-
612
Tr ummel, T., Liu, Z. and Stursberg, O.
Computing Bounds for the Synchronization Errors of Nonidentical Nonlinear Oscillators with Time-Varying Diffusive Coupling.
DOI: 10.5220/0013071100003822
In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics (ICINCO 2024) - Volume 1, pages 612-622
ISBN: 978-989-758-717-7; ISSN: 2184-2809
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

thesis of gains is particularly useful if a compromise
between the synch ronization error and th e synchro -
nization effort (through large couplin g gains) has to
be determined. A recent pa per by (Trummel e t al.,
2023) has suggested to solve this task by numeric op -
timization, however, the computation of error bounds
was not included there.
In order to establish the schemes f or analysis and
synthesis, the paper on hand uses the techn ique of
computing over-approximatio ns of reachable sets for
nonlinear systems, see e.g. (Stursberg and Krogh,
2003), (Girard, 2005), (Rungger and Zama ni, 2018)
and adopts it to analyze the evolution of the synchro-
nization error. According to the knowledge of the
authors, this is the first exposition on using reach-
able sets to explicitly compute upper bounds of syn-
chroniza tion errors for coupled nonlinear oscillators,
while the only similar work by (Sang and Zhao, 2020)
limits the focus to linear time-delayed local dynamics.
After introdu cing into the proble m setting in
Sec. 2, the main part (Sec. 3) introduces the procedure
for computing over-approxima tions of reachable sets
for synch ronization errors for given coupling gains,
including an analysis of the c omplexity of the compu-
tation. The section includes also a modification o f the
proced ure, in which the coupling gains are iteratively
changed on certain time intervals in order to limit the
upper bounds of the synchro nization errors on the re-
spective inte rvals. The effectiveness of the techniqu e s
is illustrated by numerical examples in Sec. 4, before
a conclusion and an outlook on future work is pro-
vided in Sec. 5.
2 PROBLEM DESCRIPTION
With an index set N = {1, . . . , n}, consider a set of
nonlinear dynamics:
˙x
i
(t) = f
i
(x
i
(t)), i ∈ N (1)
with state vector x
i
∈ R
n
x
, tim e variable t ∈ R, and
flow function f
i
: R
n
x
→ R
n
x
.
Assumption 1. Let f
i
(x
i
(t)) be c ontinuous in time,
continuously differentiable with respect to x
i
(t), as
well as bounded on ea ch c ompact subset of R
n
x
. For
the solution of (1), let furthermore a unique limit cy-
cle
1
exist, and let x
i
(t) converge to the limit c y cle for
any initialization.
With this assumption, we refer to the set o f dy-
namics according to (1) as nonidentical nonline ar os-
cillators. Obviously, one can expect different limit
1
For a definition of limit cycles, see e.g. the book by
(Ye and Cai, 1986).
cycles for any i in th e general case. Now con sider an
extension of (1) by a diffusive coupling law to:
˙x
i
(t) = f
i
(x
i
(t)) +
∑
j∈N
i
k
i j
(t)(x
j
(t) −x
i
(t)) ∈ R
n
x
(2)
with the subset of N
i
⊆ N of indices referring to
the o scillators cou pled directly to oscillator i, and
k
i j
(t) ∈ R
≥0
denotes different time-varying cou pling
gains. Any k
i j
(t) models the individual gain by which
the state difference of j and i affects the oscillator i.
Assume that k
i j
(t) 6= k
ji
(t) is possible and that th e
coupling network is directed and strongly co nnected.
From (Lee and Shim, 2022) it is known that the
solutions of diffusively coupled nonidentical nonlin-
ear systems
2
converge for a sufficiently large k
i j
(t) =
k = const.∀i, j ∈ N to the solution s(t) ∈ R
n
x
of the
averaged dynamics:
˙s(t) =
1
n
∑
i∈N
f
i
(s(t)), s(t
0
) =
1
n
∑
i∈N
x
i
(t
0
). (3)
It is shown by (Lee and Shim, 2022) that for any syn-
chroniza tion acc uracy ε > 0 , a threshold κ of the co u-
pling gain k exists for which:
limsup
t→∞
k x
i
(t) −s(t) k≤ ε, ∀i ∈ N (4)
for any k ≥ κ ∈ R
≥0
. Since Eq. (3) represents the av-
eraged dynamics of all oscillators and encodes itself a
nonlinear oscillator, the averaged trajectory s(t) also
converges to a lim it cycle for t → ∞.
In the following, the existence of the averaged dy-
namics is exploited to determine the error dynamics,
whereas the requirement of a large gain is omitted,
(e.g., in order to establish tradeoffs between synchro-
nization errors and efforts). In particular, the quan-
titative determination of gains, or upper bounds of
the synchronization errors are addre ssed along the fol-
lowing lines:
Problem 1. For a given κ or given time-dependent
profiles o f the coupling g ains k
i j
(t), determine the nu-
meric value o f the up per bound σ > 0 of the synchro-
nization error.
Problem 2. For specified time-varyin g upper bounds
of the synchronization error, determine values k
i j
(t)
which ensure that error bound s a re never exceeded.
Both problems will be addressed based on the
computation of over-approximations of the sets of
reachable synchronization errors. When ca lc ulating
the reachable sets, both the local d ynamics and the
2
(Lee and Shim, 2022) refer to the case that the network
is undirected and connected, which corresponds to the case
of a directed and strongly connected network.
Computing Bounds for the Synchronization Errors of Nonidentical Nonlinear Oscillators with Time-Varying Diffusive Coupling
613

network structu re are taken into account in order to re-
duce the conser vatism of the over-approximation. For
the case of Problem 1, the question may arise where
from the course of the k
i j
(t) would b e known. A pos-
sible option is the use of the method by (Trummel
et al., 2023), which uses a scheme of numeric op-
timization to compu te the tim e-varying gains, how-
ever, without guaranteeing synchronization for these
gains. The procedure proposed below to solve Prob-
lem 1 aims at providing this g uarantee. The scheme
to be developed as solution to Prob le m 2 iterates over
candidates for the gain profiles in order to eventually
satisfy the specified bounds on the synchronization er-
ror.
3 ENCLOSURE OF
SYNCHRONIZATION ERRORS
3.1 Conservative Linearization of the
Coupled Dynamics
Since it is, in the general case, not possible to compute
the dynamics of the synchronization error in closed
form, the concept followed here is to (1.) conser-
vatively linearize the nonlinear oscillator dynamics,
i.e., to resor t to a local differential inclusions of affine
structure (which is guaranteed to include the nonlin-
ear dynamics), and (2.) to use the differential inclu-
sions to determine upper bounds for the synchroniza-
tion error.
Assume for the moment that all coupling gain s
k
i j
(t) would be known and c onstant at any time, such
that a limit cycle of the averaged dynamics s(t) will
be obtained. It is then reasonable to select a suitable
number of suppo rting points along this limit cycle in
order to obtain th e local conservative linearizations.
Assume further tha t the oscillators have initial states
x
i
(t
0
) = x
i,0
close to a point s(t
0
) that belongs to the
solution of the averaged dynamic s (i.e., an initial syn-
chroniza tion er ror is possible).
Choosing a first linearization po int x
i,0
and an ele-
ment of the set:
X
i,0
:=
x ∈ R
n
x
|x −x
i,0
| ≤
ε
√
n
x
1
n
x
(5)
for all i ∈ N , where 1
n
x
∈ R
n
x
denotes a vector of
ones and ε is a g iven desired accuracy according to
(4). Additional linearization points x
i,1
, x
i,2
, . . . , x
i,p
are distributed along the limit cycle s(t) for sample
times t
q
, thus leading to partitioning of the period of
the limit cycle into time intervals [t
q
,t
q+1
] with t
q+1
=
t
q
+ δt
q
and q ∈ {0, 1, . . ., p −1}. δt
q
> 0 can change
from time step to time step, and is suitably chosen
based on the curvature of s(t), i.e., based on the value
of the second derivative of (3).
Assumption 2. Assume from now on that the cou-
pling gains k
i j
(t) are piecewise constant on [t
q
,t
q+1
]
and thus denoted by k
i j,q
.
The linearization points result from the step-by-
step computation of the solutions x
i
(t)∀t ∈ [t
q
,t
q+1
],
where the set X
i,q
of the current linearization point
is the initial set for the next computation. The set-
based com putation of the solutions is carried out us-
ing the procedure previously proposed in (Althoff
et al., 2008), which uses Lagrangian remainders to
conservatively encode the right-hand sides of (2).
When denoting the Lagrangian remainders by L
i,q,r
the conservative linearization of (2) around x
i,q
for all
i ∈ N and q ∈ {0, 1, . . . , p −1} is:
˙x
i,r
(t) = f
i,r
(s
0
) +
∂ f
i,r
(x
i
(t))
∂x
i
(t)
x
i
(t)=x
i,q
(x
i
(t) −x
i,q
)
+
∑
j∈N
i
k
i j,q
(x
j,r
(t) −x
i,r
(t)) + L
i,q,r
(6)
for each dimension r ∈ {1, . . . , n
x
} of x
i
(t) with t ∈
[t
q
,t
q+1
]. L
i,q,r
is evaluated on a set X
i,q
which is pa-
rameterized according to (5) using x
i,q
, leading to the
bound:
|L
i,q,r
| ≤w
max,i,q,r
(7)
with:
w
max,i,q,r
:= max
0≤α≤1,x
i
∈X
i,q
1
2
(x
i
−x
i,q
)
T
∂
2
f
i,r
(x
i
)
∂x
2
i
x
i
=ξ
(x
i
−x
i,q
)
and ξ := x
i,q
+ α(x
i
−x
i,q
). The values w
max,i,r
form a
vector w
max,i
∈ R
n
x
and are used to establish:
W
max,i,q
:= {w
i
∈ R
n
x
|w
i
| ≤ w
max,i,q
}.
Now, the nonlinear dynamics (2) is over-
approximated by the linearized inclusions:
˙x
i
(t) ∈(A
i,q
x
i
(t) + b
i,q
+
∑
j∈N
i
k
i j,q
(x
j
(t) −x
i
(t))) ⊕W
max,i
(8)
for t ∈ [t
q
,t
q+1
], where:
A
i,q
:=
h
∂ f
i
(x
i
)
∂x
i
i
x
i
=x
i,q
and b
i,q
:= f
i
(x
i,q
) −A
i,q
x
i,q
holds, and the symbol ⊕ denotes Minkowski addi-
tion. In order to ensure the tightness of the over-
approximations, it is important to determine or select
appropriate δt
q
, as already mentioned.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
614

Furthermore, the quantities of the local lineariza-
tions are c ollected in A
q
:= diag(A
1,q
, . . . , A
n,q
), b
q
:=
[b
T
1,q
. . . b
T
n,q
]
T
, w
m,q
:= [w
T
max,1,q
. . . w
T
max,n,q
]
T
, and
in the weighted Laplacian matrix:
K
q
=
m
11
m
12
. . . m
1n
m
21
m
22
. . . m
2n
.
.
.
.
.
.
.
.
.
.
.
.
m
n1
m
n2
. . . m
nn
∈R
n×n
. (9)
In here, m
ii
=
∑
j∈N
i
k
i j,q
and m
i j
= −k
i j,q
applies if a
coupling from oscillator j to i exists, while m
i j
= 0
otherwise. By defin ing W
m,q
:= {w ∈ R
n
x
n
|w| ≤
w
m,q
}, the dynamics of the global vector x(t) =
[x
T
1
(t) . . . x
T
n
(t)]
T
satisfies:
˙x(t) ∈ ((A
q
−(K
q
⊗I
n
x
))x(t) + b
q
) ⊕W
m,q
(10)
for t ∈[t
q
,t
q+1
], where ⊗ denotes the Kronecker pr od-
uct an d I
n
x
is the n
x
×n
x
identity matrix.
3.2 Dynamics of the Synchronization
Error
The synch ronization error e(t) ∈ R
n
x
(n−1)
for t ≥t
0
is
defined as the difference between x
1
(t) and any other
x
j
(t), j ∈ {2, 3, . . . , n}, i.e.:
e(t) =
x
2
(t) −x
1
(t)
x
3
(t) −x
1
(t)
.
.
.
x
n
(t) −x
1
(t)
= (
−1 1 0 0 . . . 0
−1 0 1 0 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
−1 0 . . . 0 1 0
−1 0 . . . 0 0 1
⊗I
n
x
)
|
{z }
:=L
e
x(t).
By use of (10), the over-approximation of the reach-
able state set can be computed by propagating the set
at time t
q
forward over the time interval [t
q
,t
q+1
]. An
over-approximation of reachable synchronization er-
rors e(t) can be de termined by using the extreme val-
ues of each loc al state x
i
(t), i ∈ N in each dimension
r ∈{1, . . . , n
x
}. The result may, however, be conserva-
tive, i.e., the set of feasible e(t) may be considerably
over-approximated. To address this p roblem, the con-
servatively linearized dynamics of e(t) is determined
accordin g to (10): First, a new matrix:
L
d
:=
[I
n
x
0
n
x
×n
x
(n−1)
]
L
e
∈ R
n
x
n×n
x
n
(11)
is defined based on L
e
, and L
d
is always invertible.
Since the relations:
x
1
(t)
e(t)
= L
d
x(t),
˙x
1
(t)
˙e(t)
= L
d
˙x(t) (12)
hold, the dynamic s of the vector [x
T
1
(t) e
T
(t)]
T
for t ∈
[t
q
,t
q+1
] is given by:
˙x
1
(t)
˙e(t)
∈ (L
d
(A
q
−(K
q
⊗I
n
x
))L
−1
d
)
x
1
(t)
e(t)
+ L
d
b
q
) ⊕W
d,q
(13)
accordin g to (10) with:
W
d,q
:=
w ∈ R
n
x
n
−|L
d
|w
m,q
≤ w ≤ |L
d
|w
m,q
.
When defining d(t) := [x
T
1
(t) e
T
(t)]
T
for simplicity of
notation, the initial set E(t
0
) of d(t
0
) can be written
as:
E(t
0
) :=
d ∈ R
n
x
n
|d −
x
1,0
0
.
.
.
0
| ≤
x
max
1
n
x
2x
max
1
n
x
.
.
.
2x
max
1
n
x
(14)
with x
max
:=
ε
√
n
x
accordin g to (5). Starting
from E(t
0
), a method to compute a tight over-
approximation of the reachable set of d(t) (and thus
of the synchronization er ror e(t)) for the time interval
[t
0
,t
p
] is introduced, which is based on the results by
(Girard, 2005).
3.3 Reachable Set of the
Synchronization Error
As (10) and (13) only hold for the time interval
[t
q
,t
q+1
], the reachable set of d(t) is iteratively c om-
puted for each q ∈ {0, 1, . . . p − 1}. As the reach-
able set of d(t) may be small at the sampling time
t
q
, while being large otherwise, the reac hable set of
d(t) is computed for each interval, instead of only at
the sampling times.
For the interval [t
q
,t
q+1
], it is known from (13) that
the relation:
d(t) ∈e
A
d,q
δt
q
E(t
q
)
⊕
Z
t
q+1
t
q
e
(t
q+1
−τ)A
d,q
(L
d
b
q
⊕W
d,q
)dτ (15)
holds with A
d,q
:= L
d
(A
q
− (K
q
⊗ I
n
x
))L
−1
d
. The
set on the right-hand side of (15) thus con-
tains the true reachable set of d(t) in this in-
terval. To (efficiently) determine this set, the
Computing Bounds for the Synchronization Errors of Nonidentical Nonlinear Oscillators with Time-Varying Diffusive Coupling
615
integral
R
t
q+1
t
q
e
(t
q+1
−τ)A
d,q
(L
d
b
q
⊕ W
d,q
)dτ is over-
approximated by a hypercube C
l
q
⊆ R
n
x
n
centered in
the origin 0
n
x
n
, and all sides have a com mon length
l
q
∈R
>0
determined by:
l
q
:= 2
Z
t
q+1
t
q
e
(t
q+1
−τ)kA
d,q
k
∞
k L
d
b
q
+ |L
d
|w
m,q
k
∞
dτ
:=
2(e
δt
q
kA
d,q
k
∞
−1)
k A
d,q
k
∞
k L
d
b
q
+ |L
d
|w
m,q
k
∞
. (16)
Let R
[t
q
,t
q+1
]
(E(t
q
)) denote the true reachable set
of d(t) for the interval [t
q
,t
q+1
]. The relation:
R
[t
q
,t
q+1
]
⊆
[
t∈[t
q
,t
q+1
]
e
A
d,q
t
E(t
q
)
⊕C
l
q
(17)
thus applies according to ( 15) and (16), where
S
t∈[t
q
,t
q+1
]
e
A
d,q
t
E(t
q
) is the union of e
A
d,q
t
E(t
q
) for all
t ∈ [t
q
,t
q+1
]. Following the method in (Girar d, 2005)
to determine the union, the reachable set of d(t) at
time t
q+1
is first over-approximated by:
ˆ
E(t
q+1
) := e
A
d,q
t
q+1
E(t
q
) ⊕C
l
q
(18)
accordin g to (17). Based on E(t
q
) and
ˆ
E(t
q+1
),
the union
S
t∈[t
q
,t
q+1
]
e
A
d,q
t
E(t
q
) is then over-
approximated by a zonotope. The general form of a
zonotope is:
Z := {z ∈ R
n
x
n
| z = c +
o
∑
h=1
g
h
, |z| ≤ 1} (19)
with the center c ∈ R
n
x
n
and the generators g
h
∈
R
n
x
n
, h ∈ {1, . . . , o} of Z. Note that the initial set
E(t
q
) in (14) also represents a zo notope Z
t
q
with
the center c
t
q
:= [x
T
1,q
0
1×n
x
(n−1)
]
T
and a number of
n
x
n generators g
h,t
q
∈ R
n
x
n
with: [g
1,t
q
, . . . , g
n
x
n,t
q
] :=
diag(x
max
I
n
x
, 2x
max
I
n
x
, . . . , 2x
max
I
n
x
). Based on Z
t
q
, a
new zonotope Z
[t
q
,t
q+1
]
with the center:
c
[t
q
,t
q+1
]
:= 0.5(e
A
d,q
t
q
+ e
A
d,q
t
q+1
)d(t
q
) (20)
and a numb er of 2n
x
n + 1 generators g
h,[t
q
,t
q+1
]
∈R
n
x
n
,
h ∈{1, . . . , 2n
x
n + 1}can be determined. The first n
x
n
generato rs are ob tained to:
g
h,[t
q
,t
q+1
]
:= 0.5(e
A
d,q
t
q
+ e
A
d,q
t
q+1
)g
h,t
q
(21)
for all h ∈ {1, . . . , n
x
n}, while for the last n
x
n genera-
tors:
g
h,[t
q
,t
q+1
]
:= 0.5(e
A
d,q
t
q
−e
A
d,q
t
q+1
)g
h−(n
x
n+1),t
q
(22)
applies for all h ∈ {n
x
n + 2, . . . , 2n
x
n + 1}. The re-
maining (n
x
n + 1)-th generator assumes the value:
g
n
x
n+1,[t
q
,t
q+1
]
:= 0.5(e
A
d,q
t
q
−e
A
d,q
t
q+1
)d(t
q
). (23)
In this way, the zonotope Z
[t
q
,t
q+1
]
is ensured to con-
tain the initial set E(t
q
) and th e end set
ˆ
E(t
q+1
).
Then, a new hypercube C
γ
q
is defined with a center
at 0
n
x
n
and with all sides having a common length
γ
q
∈ R
>0
:
γ
q
:= (e
t
q+1
kA
d,q
k
∞
−t
q+1
k A
d,q
k
∞
−1) sup
d∈{e
A
d,q
t
q
E(t
q
)}
k d k
∞
. (24)
In accordance with a result in (Girard, 2005), the
relation:
[
t∈[t
q
,t
q+1
]
e
A
d,q
t
E(t
q
) ⊆ Z
[t
q
,t
q+1
]
⊕C
γ
q
(25)
holds. To this end, the reachable set R
[t
q
,t
q+1
]
(E(t
q
))
is over-approxim ated by a new set:
ˆ
R
[t
q
,t
q+1
]
(E(t
q
)) := Z
[t
q
,t
q+1
]
⊕C
γ
q
⊕C
l
q
(26)
accordin g to (17), see also Fig. 1.
Remark 1. The described procedure to compute the
set
ˆ
R
[t
q
,t
q+1
]
(E(t
q
)) is tractable even for a large num-
ber of oscillators, which is important for the applica-
tion to larger networks. This holds true since l
q
and
γ
q
of the two hypercubes can b e directly computed
according to (16) and (24), while for the zonotope
Z
[t
q
,t
q+1
]
, the numbe r of generators to be computed
increases only linearly with the number n of oscilla-
tors.
By iteratively determining the over-approximated
reachable sets of Eq. (26), an over-approximated
reachable set can be determined for the whole period
[t
0
,t
p
] of the limit cycle consisting of p intervals:
ˆ
R
[t
0
,t
p
]
(E(t
0
)) :=
p−1
[
q=0
ˆ
R
[t
q
,t
q+1
]
(
ˆ
E(t
q+1
)) (27)
with
ˆ
E(t
0
) := E(t
0
). As only the part e(t) of the vec-
tor d(t) := [x
T
1
(t) e
T
(t)]
T
refers to th e synchronization
0
1
3 4
0
E
3 4
d
3
(t)
d
4
(t)
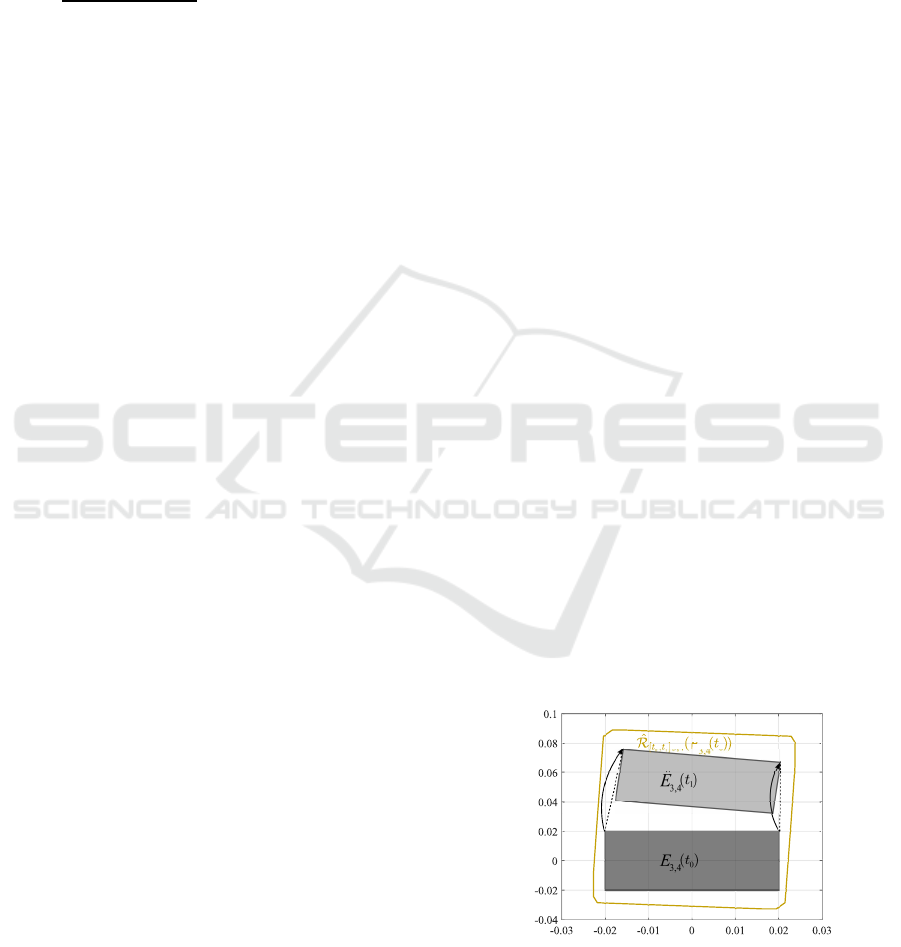
Figure 1: Consider the first reachable set for compo-
nent three and four of d(t): Starting from E
3,4
(t
0
),
which is also the zonotope Z
t
0
,3,4
, the sets
ˆ
E
3,4
(t
1
) and
ˆ
R
[t
0
,t
1
]3,4
(E
3,4
(t
0
)) can be determined, and both are zono-
topes.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
616

error, on e can project
ˆ
R
[t
q
,t
q+1
]
(
ˆ
E(t
q+1
)) o nto the cor-
respond ing subspac e in order to obtain the reachable
set of e(t). Now let σ := k
ˆ
R
[t
0
,t
p
]
(E(t
0
))k
max
, such
that the so ught u pper bound of the synchronization
error is obtaine d.
3.4 Determination of Coupling Gains
Based on Reachable Sets
While the last section aimed at computing an upper
bound o n the size of the over-approximated set of syn-
chroniza tion errors, the perspective is now r everted,
i.e., given a bounding set fo r the erro r, the objective is
to obtain adm issible time-varying coupling gains.
First of all, a possibly time-varying bounding set
E
max
(t) ⊆ R
n
x
n
of the maximally allowable synchro-
nization errors is chosen for any x
j
(t) − x
1
(t), j ∈
{2, . . . , n}. Corre sponding to Assumption 2, it makes
sense to c hoose aga in a piecewise constant bounding
set E
max
(t) = E
max,q
for t ∈[t
q
,t
q+1
]. The objective is
now to synthesize the coupling gains k
i j,q
such that
the reachable set of x
i
(t) −x
1
(t) within one period
never leaves E
max,q
. An option to o btain k
i j,q
is to
start from an initial value and then to iterate it until
the size of the over-approximation of the set of reach-
able synchroniza tion errors is limited to E
max,q
.
To do so, first determine the period T of the limit
cycle of (3) and set t
p
equal to T while t
0
= 0 . The pe-
riod is divided into p inter vals, whereby it should be
noted that although the k
i j,q
are assumed to be dif-
ferent for each time interval [t
q
,t
q+1
], the coupling
gains can also be constant for a series of time inter-
vals [t
q
,t
q+1
], . . . , [t
q+v
,t
q+1+v
] with v ∈ N, v < p.
Starting from initial values x
i,0
close to a poin t
of the limit cycle of the averaged dynamics, an ini-
tial set E(0) results as in (14), and the reachable
set
ˆ
R
[0,T ]
(E(0)) can thus be determined. By allow-
ing the coupling gains to be adjusted in each inter val
[t
q
,t
q+1+r
], the reachable set
ˆ
R
[t
q+l
,t
q+1+l
]
(
ˆ
E(t
p+l
)),
l ∈ {0, . . . , v + 1} can be su ccessively constructed.
The synthesis ta sk, accordingly, is to find suitable
gains k
i j,q
for ea c h interval (e.g. the smallest on es
which are just sufficient to keep the error within the
selected bound).
Theorem 1. Let the projectio ns of
ˆ
R
[t
q+l
,t
q+1+l
]
(
ˆ
E(t
p+l
)), l ∈ {0, . . . , v + 1} onto each
subspace of e
( j,1)
(t) := x
j
(t) −x
1
(t), j ∈ {2, . . . , n}
be denoted by
ˆ
R
[t
q+l
,t
q+1+l
]r,r+1
(E
r,r+1
(t
0
)) with the
dimensions r ∈ {1, . . . , n
x
n −1}. If:
a.) the projected sets
ˆ
R
[t
q+l
,t
q+1+l
]r,r+1
(E
r,r+1
(t
0
))
with the dimensions r ∈ {1, . . . , n
x
n −1} are co n-
tained in E
max,q
for all coordinates r and all q,
and if
b.)
ˆ
E(T ) is contained in the initial set E(t
0
) at the
end of the last interval,
then the synchronization error e
( j,1)
(t), j ∈{2, . . . , n},
never exceeds E
max,q
for the whole phase of preserv-
ing syn chroniza tion.
Proof. Starting from the first interval of the limit cy-
cle, the if-cond ition under a.) ensures that the syn-
chroniza tion error starting from E(0) at t = 0 is al-
ways bounded by the E
max,q
within the first period.
At the time t = T , which is the end of the first pe-
riod as well as the beginning of the second period,
the second if-condition b.) ensures that the initial set
ˆ
E(T ) of the second period is a subset of E(0). Thus,
the synchron iz ation er ror within the second period is
further bounded by the E
max,q
and containe d in E(0)
at the end. Recursive application guarantees that the
error is bounded by the E
max,q
for all t > 0.
By using this scheme, Problem 2 of synth esizing
the couplin g gains k
i j,q
is solved. Note that the set
ˆ
R
[t
q+l
,t
q+1+l
]
(
ˆ
E(t
p+l
)), l ∈ {0, . . . , v + 1 } for each in-
terval dep ends explicitly on the linearization (10) and
the Laplacian matrix L.
4 NUMERICAL EXAMPLES
In the following, two settings with two different
classes of nonlinear limit cycle oscillato rs are consid-
ered. For the first setting, a constant gain k
i j
(t) = k
is used, while a tim e-variable k(t) is synthesized for
the r e spective oscillator ne twork in the second setting.
For the sake of sim plicity, the gains for all coupling
links are selected to be the same, a uniform step size
δt
q
= δt > 0 is selected, and E
max
(t) is chosen to be
constantly E
max
for all times.
4.1 Coupled van-der-Pol Oscillators
In the first te st, the synchronization problem for an
example of n = 10 nonidentical van-der-Pol o scilla-
tors:
˙x
i,1
(t)
˙x
i,2
(t)
=
x
i,2
(t)
−x
i,1
(t)+ µ
i
(1−x
i,1
(t)
2
)x
i,2
(t)
(28)
with significantly different parameter µ
i
> 0 and i ∈
N is considered, see e.g. (Trummel et al., 2023). The
value of µ
i
decides the form of each loc a l limit cycle.
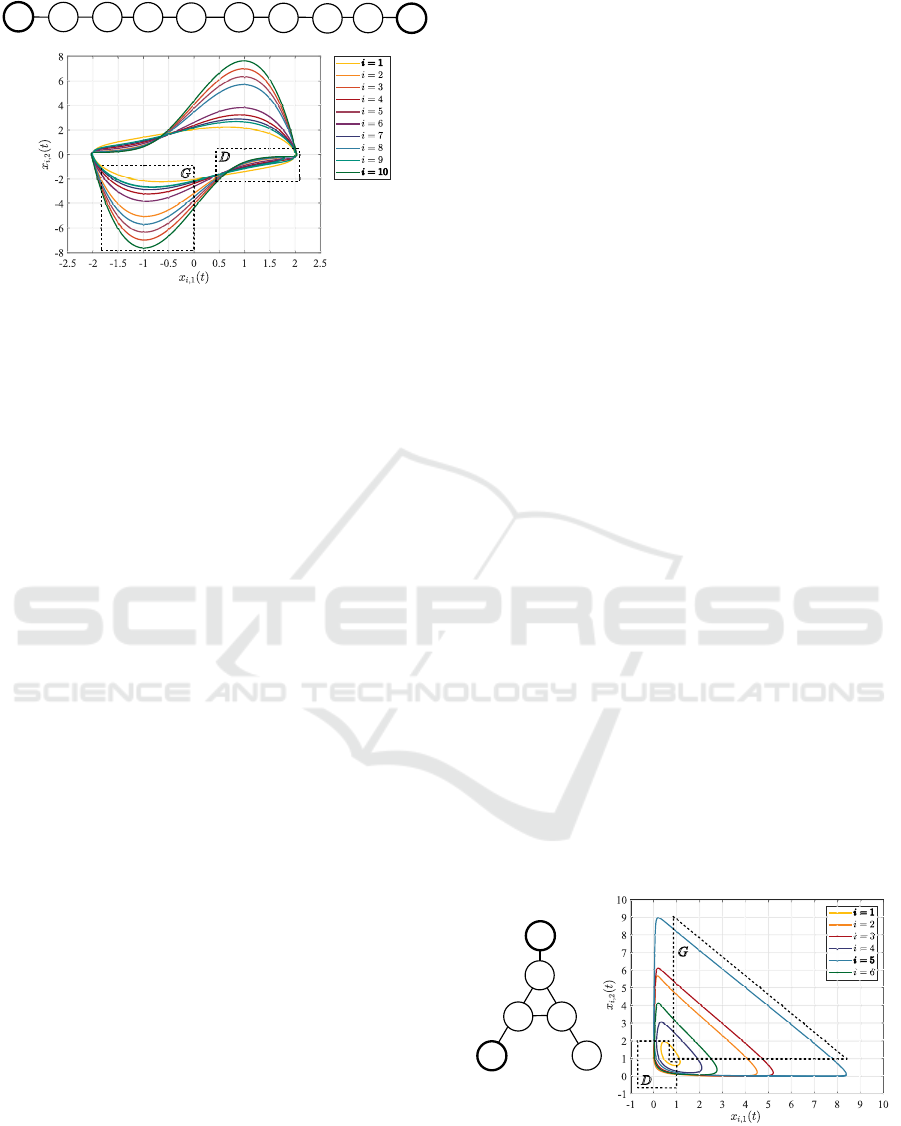
It can be noticed fr om their limit cycles in Fig. 2
that even without coupling, the lim it cycles are close
to each other in the region marked as D, while far
to each in the region G. Hence, one can infer that a
Computing Bounds for the Synchronization Errors of Nonidentical Nonlinear Oscillators with Time-Varying Diffusive Coupling
617
G
D
3
2
4
5
9
6
8
10
1
7
Figure 2: The considered 10 oscillators are assumed
to be connected by undirected edges in chain structure,
while their parameters are selected to: µ
1
= 0.5, µ
2
=
3, µ
3
= 4.5, µ
4
= 1.5, µ
5
= 4, µ
6
= 2, µ
7
= 1.2, µ
8
= 3.5, µ
9
=
1, µ
10
= 5. Their uncoupled limit cycles are quite different
in the region G, while being quite similar in the region D.
larger coupling gain would be required to preserve the
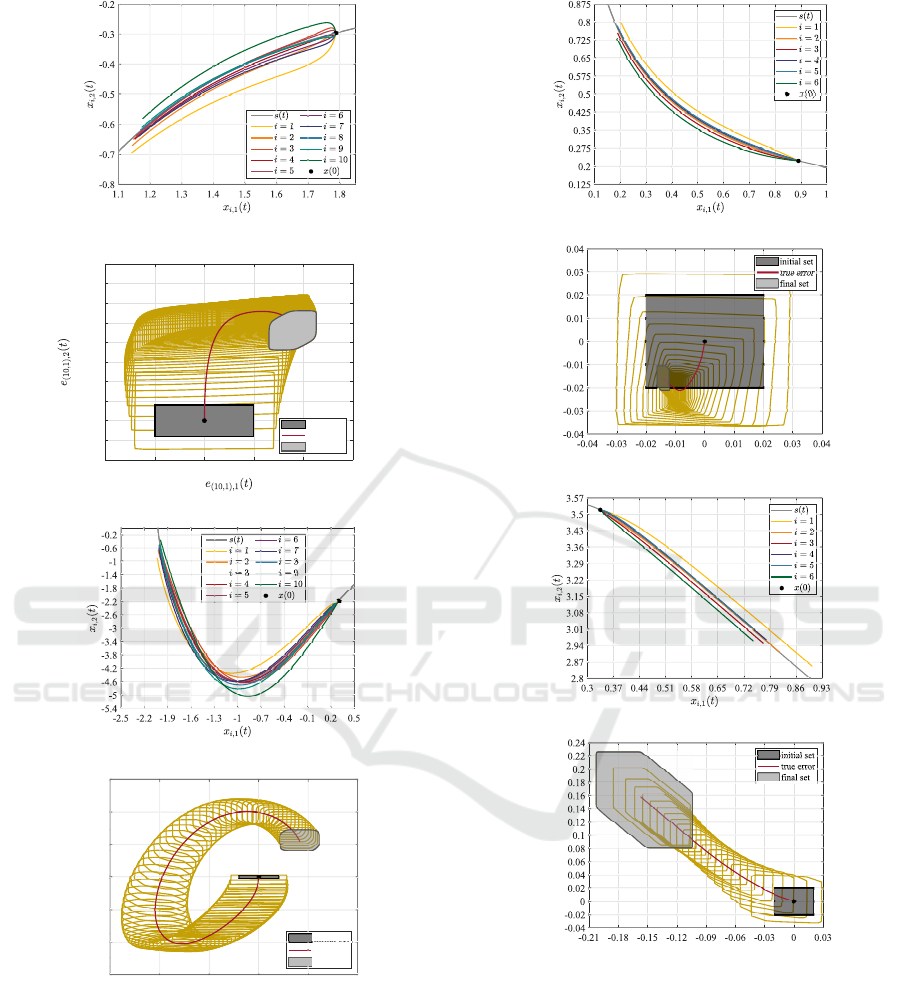
synchro nization in G than in D. To examine this, the
reachable set
ˆ
R
[0,t
p
]
(E(t
0
)) of the synchronization er-
ror is computed for using a gain k = 20 – once for an
initial set in the region G (on the limit cycle of the
averaged dynamics (3)), and once with an initial set
in D, see Fig. 4. Note that the obtained reachable set
ˆ
R
[0,t
p
]
(E(t
0
)) is projected onto the subspace of the
error e
10,1
(t) for illustration rea sons. This pair of os-
cillators is chosen since the parameters µ
1
= 0.5 and
µ
10
= 5 differ the most over all oscillators. By com-
paring the reachable sets in Fig . 4b and Fig. 4d, one
can notice that th e reac hable set starting from the re-
gion D in the former plot is m uch smaller than the
one starting from G even for a la rger time interval
(t
p
= 1.5 versus t
p
= 0.75). This shows that, in or-
der to keep the synchronization e rror below a certain
bound, a coupling gain sm a ller than k = 20 can be ap-
plied for the region D, while a larger on e is required
for the region G.
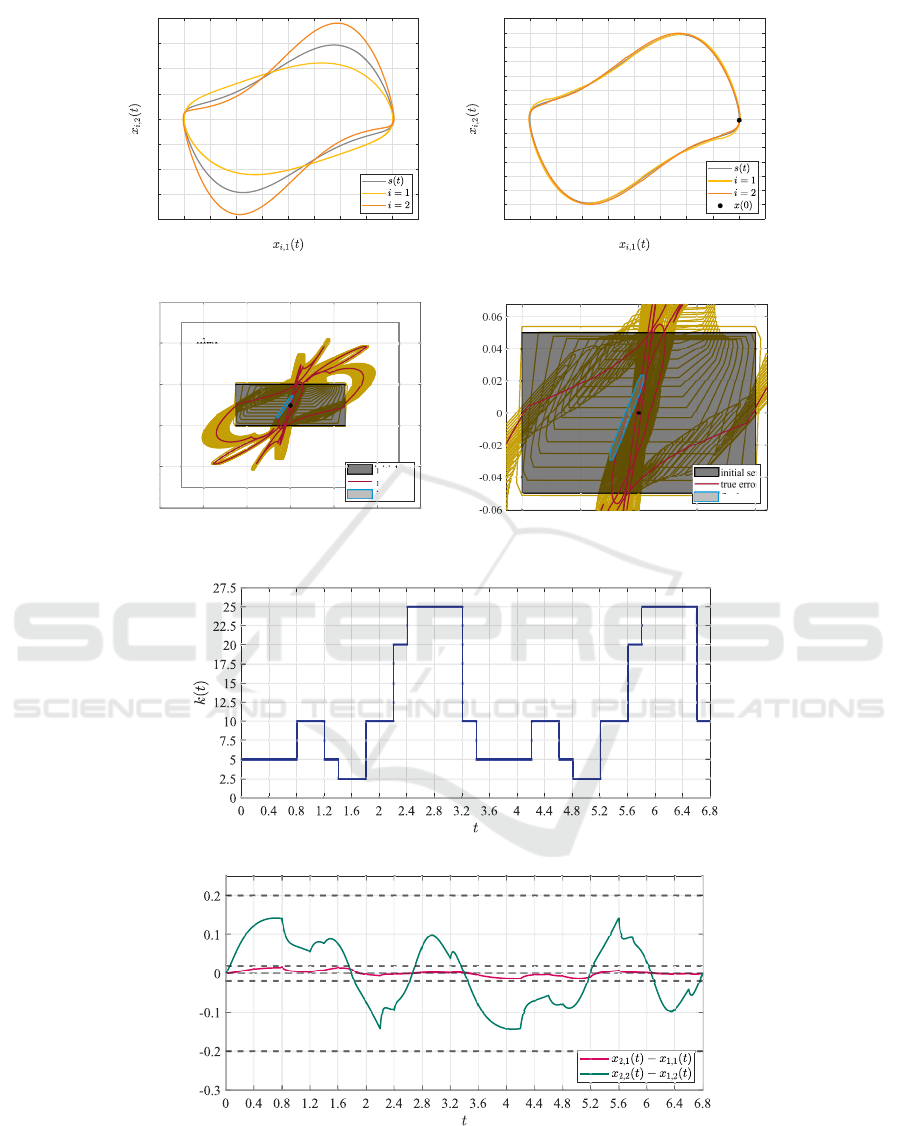
Then, the coupling gain k for two diffusively cou-
pled van-der-Pol oscillators with µ
1
= 0.5 and µ
2
= 2
is synthesized based on the reachable set (see the limit
cycles of the two oscillators and the one of the aver-
aged dynamics (3) in Fig. 6a). A given set E
max
of a
maximally permitted synchronization er ror is shown
in Fig. 6c. It is shown that by using the time -varying
coupling ga in in Fig. 6e, the reachable sets of the syn-
chroniza tion error are always contained in E
max
. At
the same time, the reachable set
ˆ
E(T ) at the end of a
period with T = 6.8 and v = 34 is also contained in
the initial set E(0), see Fig. 6d.
4.2 Coupled Merkin–Needham–Scott
Oscillators
In the second test, a number of six diffusively coupled
Merkin–N eedham–Scott oscillators (Saha and Gan-
gopad hyay, 2017) in the form of:
˙x
i,1
(t)
˙x
i,2
(t)
=
−x
i,1
(t) + (η
i
+ x
i,1
(t)
2
)x
i,2
(t)
β
i
−(η
i
+ x
i,1
(t)
2
)x
i,2
(t)
with non identical parameters η
i
≥ 0, β
i
∈ R, and
i ∈ N are consid e red, see Fig. 3. The regions D and
G are defined equivalently to the previous example,
and again the oscillators with the largest difference
between their limit cycles are taken into account. It
can be noticed that the reachable error sets starting
from regio n D are much smaller than the one initializ-
ing from area G. T herefore, a gain much smaller tha n
5 can be applied to obtain a synchronization which is
similar to the one for k = 5. For the area G, the re-
verse case is observed: the gain has to be increased to
reduce the size of the reachable sets. This observation
can once more be exam ined b y computing the reach-
able set of the synchronization error for usin g a gain
k = 5, and similar as the first test, once starting from
the region G a nd once from the region D. The result-
ing reachable sets are demonstrated in Fig. 5, which
confirmed the ob servation.
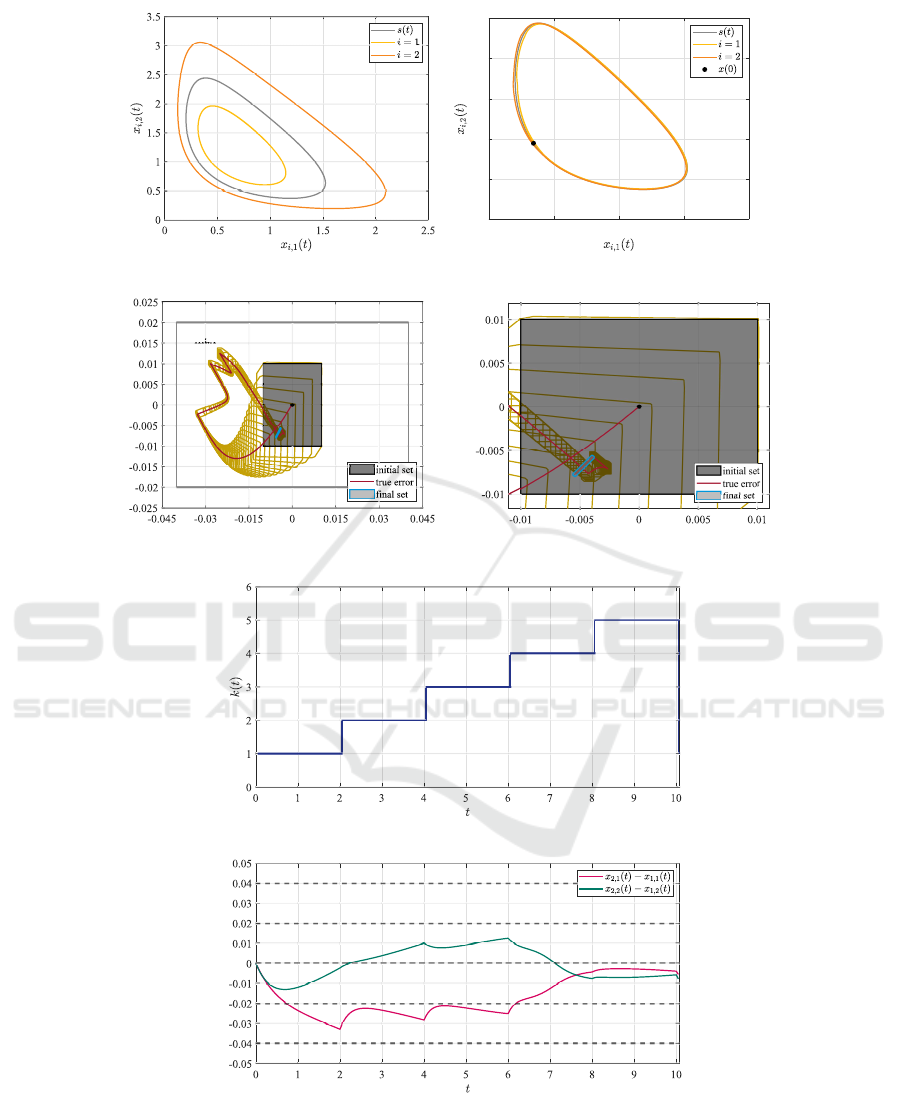
Finally, the coupling gains for two coupled
Merkin–N eedham–Scott oscillators (see Fig. 7a) with
parameters η
1
= 0.1, β
1
= 0.6, η
2
= 0.05, and β
2
=
0.5 are synthesized for the phase of preserving syn-
chroniza tion. The application of the procedure ex-
plained in Sec. 3.4 results in the time-varying cou-
pling gains shown in Fig. 7e, and satisfying E
max
as
in Fig. 7c. Obviously, E
max
contains
ˆ
E(T ) at the end
of a period with T = 10.05 and v = 201, see Fig. 7d.
Thus, the time-varying coupling gain satisfies the
two conditio ns in Sec. 3.4, making it a good choice
for preserving synchronization.
G
D
3
2
4
5
6
1
Figure 3: Network of 6 Merkin–Needham–Scott limit cy-
cle oscillators with parameters: η
1
= 0.1, η
2
= 0.01, η
3
=
0.01, η
4
= 0.05, η
5
= 0.005, η
6
= 0.02, and β
1
= 0.6, β
2
=
0.2, β
3
= 0.3, β
4
= 0.5, β
5
= 0.4, β
6
= 0.25. Similar to the
van-der-Pol oscillator example, the trajectories in region D
are more similar than the ones in area G.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
618
(a)
-0.04 -0.02 0 0.02 0.04 0.06
-0.05
-0.025
0
0.025
0.05
0.075
0.1
0.125
0.15
0.175
0.2
initial set
true error
final set
(b)
(c)
-0.15 -0.1 -0.05 0 0.05 0.1
-1.5
-1
-0.5
0
0.5
1
1.5
initial set
true error
final set
e
(10,1),1
(t)
e
(10,1),2
(t)
(d)
Figure 4: By using a coupling gain k = 20, the reachable set
of e
(10,1)
(t) is computed once starting from the region D and
once from the region G in Fig. 2. The gray limi t cycle seg-
ments in (a) and (c) are the one from the averaged dynamics
(3). The zonotopes in yellow in (b) and (d) are the interme-
diate reachable sets
ˆ
R
[t
q
,t
q+1
]
(
ˆ
E(t
q+1
)) projected onto the
space of e
(10,1)
(t) with δt = 0.005. The union of those inter-
mediate reachable sets is thus the reachable set of the whole
interval [0, 1.5] for (b) and [0, 0.75] for (d).
(a)
e
(5,1),1
(t)
e
(5,1),2
(t)
(b)
(c)
e
(5,1),1
(t)
e
(5,1),2
(t)
(d)
Figure 5: Reachable sets of e
(5,1)
(t) determined for k = 5,
once starting from the region D and once from G in Fig.
3. The parts (a) and (c) show the gray limit cycle seg-
ments from the averaged dynamics (3). The yellow colored
zonotopes in (b) and (d) are the intermediate reachable sets
ˆ
R
[t
q
,t
q+1
]
(
ˆ
E(t
q+1
)) projected onto the space of e
(5,1)
(t) with
δt = 0.05. The union of these reachable sets is the reachable
set for the whole interval [0, 2] for (b) and [0, 1] for (d).
Computing Bounds for the Synchronization Errors of Nonidentical Nonlinear Oscillators with Time-Varying Diffusive Coupling
619
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-4
-3
-2
-1
0
1
2
3
4
(a)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
(b)
-0.024 -0.016 -0.008 0 0.008 0.016 0.024
-0.25
-0.15
-0.05
0.05
0.15
0.25
initial set
true error
final set
e
(2,1),1
(t)
e
(2,1),2
(t)
E
max
(c)
-0.01 -0.005 0 0.005 0.01
t
r
final set
e
(2,1),1
(t)
e
(2,1),2
(t)
(d)
(e)
(f)
Figure 6: By using the time-varying coupling gains in (e), the reachable sets of the synchronization error in (c) are always
contained in E
max
for the whole period, while
ˆ
E(T ) at the end of a period is also contained in E(0), see (d). A possible
evolution of the synchronization error e
(2,1)
(t) in (f) of the synchronizing states in (b) confirms the result.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
620
(a)
0 0.5 1 1.5 2
0
0.5
1
1.5
2
2.5
(b)
e
(2,1),1
(t)
e
(2,1),2
(t)
E
max
(c)
e
(2,1),1
(t)
e
(2,1),2
(t)
(d)
(e)
(f)
Figure 7: The application of the time-varying coupling gains in (e) leads to the reachable sets of the synchronization error in
(c), while they are always contained in E
max
for the whole period.
ˆ
E(T ) at t he end of a period is also contained in E(0), see
(d). In (f), the evolution of the synchronization error e
(2,1)
(t) is illustrated for the synchronizing states in (b).
Computing Bounds for the Synchronization Errors of Nonidentical Nonlinear Oscillators with Time-Varying Diffusive Coupling
621

5 CONCLUSIONS
The pap e r has provid ed techniques to analyze and
synthesize bounds of the synchronization error f or a
network of diffusively coupled nonidentical nonlin-
ear limit cycle oscillators. Since the synchronization
error cannot be derived as analytic expression due to
the non linear dynamics of the local oscillators, over-
approximating reachable sets of the error are deter-
mined for evaluation over time. Based on the obtained
reachable set, a suitable coupling gain to preserve
the sync hronizatio n can be synthesized with a guar-
anteed bound on the maximal synchronization e rror.
Effectiveness of this method is con firmed in differ-
ent simulations with respect to both, the reachable set
computations and the synthesis of the cou pling gain.
The method s can be applied to any possible coupling
topology of the oscillator network.
Future work aims at applying the method to other
types of n onlinear oscillators, and to the consideration
of exogenous signals imposed on the oscillators.
ACKNOWLEDGMENTS
Partial funding from the German Research Founda-
tion (DFG) as part of the Research Training Group
’Biological Clocks o n Mu ltiple Time Scales’ is grate-
fully acknowledged.
REFERENCES
Althoff, M., Stursberg, O., and Buss, M. (2008). Reach-
ability analysis of nonlinear systems with uncertain
parameters using conservative linearization. In IEEE
Conf. on Decision and Control, pages 4042–4048.
Girard, A. (2005). Reachability of uncertain linear systems
using zonotopes. In Int. Workshop on Hybrid Systems:
Computation and Control, pages 291–305. Springer.
Kim, P., Oster, H., Lehnert, H., Schmid, S. M., Sala-
mat, N., Barclay, J. L., Maronde, E ., Inder, W. , and
Rawashdeh, O. (2019). Coupling the circadian clock
to homeostasis: The role of period in timing physiol-
ogy. Endocrine reviews, 40(1):66–95.
Lee, J. G. and Shim, H. (2022). Design of heteroge-
neous multi-agent system for distri buted computation.
Trends in Nonlinear and Adaptive Control: A Tribute
to Laurent Praly for his 65th Birthday, pages 83–108.
Lee, J. G., Trenn, S., and Shim, H. (2022). Synchro-
nization with prescribed transient behavior: Hetero-
geneous multi-agent systems under f unnel coupling.
Automatica, 141:110276.
Panteley, E. and Lor´ıa, A. (2017). Synchronization and
dynamic consensus of heterogeneous networked sys-
tems. IEEE Trans. on Automatic Control, 62(8):3758–
3773.
Rungger, M. and Zamani, M. (2018). Accurate reachability
analysis of uncertain nonlinear systems. In Int. Conf.
on Hybrid Systems: Comp. and Control, pages 61–70.
Saha, S. and Gangopadhyay, G. (2017). Isochronicity and
limit cycle oscillation in chemical systems. Journal of
Mathematical Chemistry, 55:887–910.
Sang, H . and Zhao, J. (2020). Event-driven synchronization
of switched complex networks: A reachable-set-based
design. IEEE Trans. on Neural Networks and Learn-
ing Systems, 32(10):4761–4768.
Scardovi, L. and Sepulchre, R. (2008). Synchronization in
networks of identical linear systems. In IEEE Conf.
on Decision and Control, pages 546–551.
Stursberg, O. and Kr ogh, B. H . (2003). Efficient representa-
tion and computation of reachable sets for hybrid sys-
tems. In Hybrid Systems: Comp. and Control, pages
482–497. Springer.
Trummel, T., Liu, Z., and Stursberg, O. (2023). On optimal
synchronization of diffusively coupled heterogeneous
van-der-Pol oscillators. Proc. of the 22nd IFAC World
Congress, pages 9475––9480.
Wang, B., Suzuki, H., and Aihara, K. (2016). Enhancing
synchronization stability in a multi-area power grid.
Scientific reports, 6(1):26596.
Wang, Y.-W., Xiao, J.-W., Wen, C., and Guan, Z.-H. (2011).
Synchronization of continuous dynamical networks
with discrete-time communications. IEEE Trans. on
neural networks, 22(12):1979–1986.
Xiao, Y. and Zhu, K. (2006). Optimal synchronization con-
trol of high-precision motion systems. IEEE Trans. on
Industrial Electronics, 53(4):1160–1169.
Ye, Y. and Cai, S.-l. (1986). Theory of limit cycles, vol-
ume 66. American Mathematical Soc.
Zhao, J., Hill, D. J., and Liu, T. (2012). Global bounded
synchronization of general dynamical networks with
nonidentical nodes. IEEE Trans. on Automatic Con-
trol, 57(10):2656–2662.
Zhu, S., Zhou, J. , Yu, X., and Lu, J. (2020). Bounded
synchronization of heterogeneous complex dynamical
networks: A unified approach. IEEE Trans. on Auto-
matic Control, 66:1756–1762.
ICINCO 2024 - 21st International Conference on Informatics in Control, Automation and Robotics
622
