Enhancing Parameters Estimation in Subsurface Imaging with
Ground Penetrating Radars
Deepak Pareek
a
and Jyoti Khandelwal
b
Department of CSE, University of Engineering and Management, Jaipur, India
Keywords:
GPR, U-net, HMC, Convolution, Regression.
Abstract:
Ground Penetrating Radar (GPR) images cannot be directly inverted to obtain subsurface source images, mak-
ing it a challenging computational problem. This work investigates two fundamentally different approaches
to solving the GPR inverse problem: a Hamiltonian Monte Carlo (HMC) method and a U-net neural network.
HMC, a Markov Chain Monte Carlo technique, evolves the system state to minimize the objective function,
while U-net leverages convolutional neural networks for regression to predict pixel-wise reflectivity values.
Extensive experiments on simulated GPR data with varying numbers of sources reveal that HMC’s perfor-
mance, measured by the Structural Similarity Index (SSI), deteriorates as more sources are introduced. In
contrast, the U-net model demonstrates remarkable robustness, maintaining high SSI scores even with nu-
merous sources present. The results indicate that in scenarios with abundant GPR training data and complex
source distributions, a U-net model is preferable over HMC due to its superior generalization capability and
efficient parallel processing. However, HMC offers interpretability advantages by allowing statistical analysis
of individual pixels. This work highlights the trade-offs between the two approaches and provides insights for
selecting the appropriate method based on the problem’s complexity and data availability.
1 INTRODUCTION
1.1 Ground Penetrating Radar
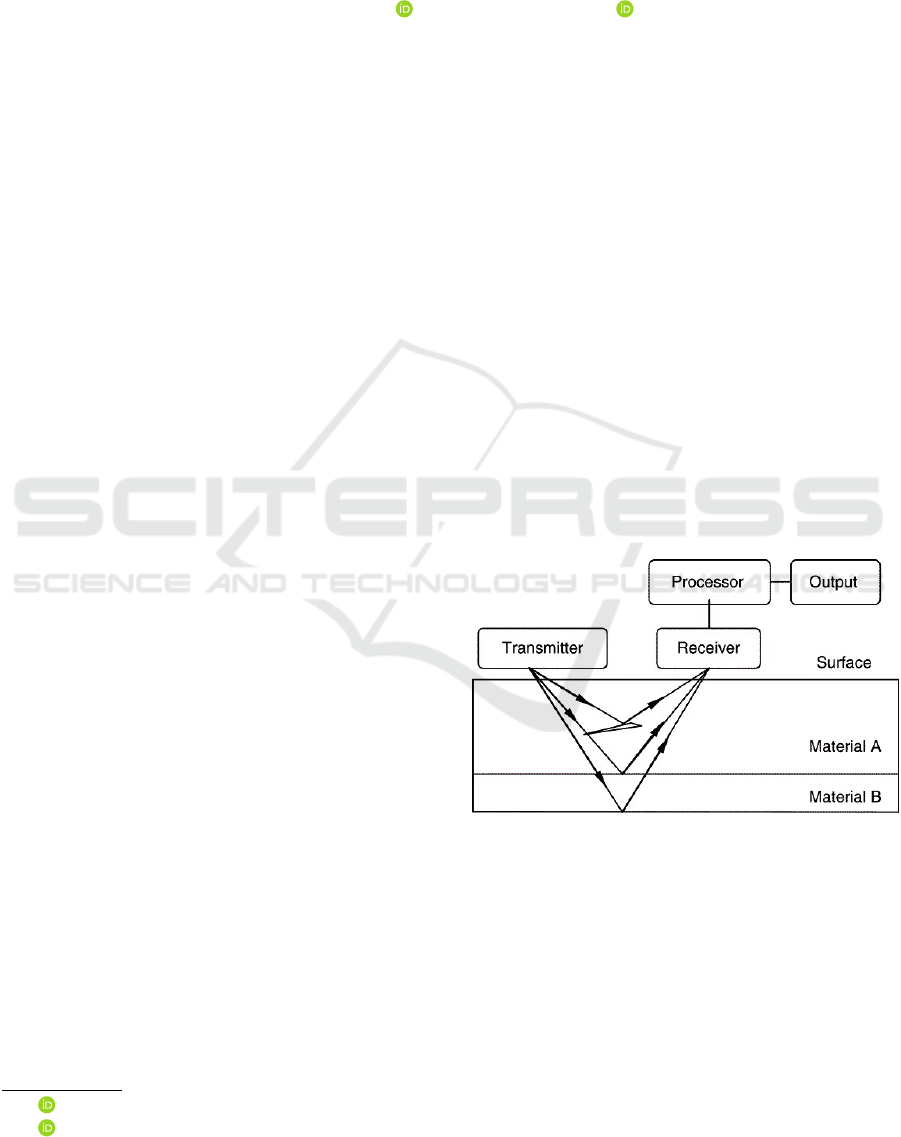
GPR Fig. 1 is broken down into the below subcate-
gories, which are categorized as geophysical surveys
and specifically involve the use of radar to probe the
surface of the ground. This method is very helpful
for locating items on the ground, especially utility
lines, where the gourd contains features like concrete,
metal, or plastic lines, cables and even masonry struc-
tures. GPR works by emitting high-frequency electro-
magnetic pulses into the earth’s surface and measur-
ing the reflection of the pulse that comes back from
the objects and interfaces lying in the ground. In this
study we use two methods to obtain object source im-
ages from GPR images: Hamiltonian Monte Carlo
and a U-net Neural Network.
a
https://orcid.org/0009-0009-7739-1832
b
https://orcid.org/0000-0002-3027-258X
Figure 1: GPR System.
1.2 Hamiltonian Monte Carlo
Markov Chain Monte Carlo (MCMC) methods are
widely used to obtain source images from GPR re-
sults. For instance (Hunziker et al., 2019) (Qin et al.,
2016) use Bayesian-based MCMC methods to sim-
ulate and reconstruct GPR source images. In this
work, we use a Hamiltonian Monte Carlo approach
(HMC) to do this task. HMC was initially devel-
oped in 1987 by (Duane et al., 1987) as a method
based on the idea of energy conservation and mini-
mal action path from Hamiltonian Mechanics (HM).
154
Khandelwal, J. and Pareek, D.
Enhancing Parameters Estimation in Subsurface Imaging with Ground Penetrating Radars.
DOI: 10.5220/0013263400004646
In Proceedings of the 1st International Conference on Cognitive & Cloud Computing (IC3Com 2024), pages 154-160
ISBN: 978-989-758-739-9
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
Compared to standard random walk-in metropolis al-
gorithms, HM properties allow HMC methods better
convergence to the typical set-in problems with high
dimensionality. This is therefore very useful for GPR
problems where the solution space has the same di-
mensions as the number of pixels in the image (there-
fore for typical images of 64 × 64 pixels one has to
consider systems of dimensions up to 4096)
1.3 Neural Networks
The U-net fig. 2 architecture, initially developed for
segmenting biomedical images, consists of two main
components: it contains an encoder and a decoder,
an encoder and a decoder. In semantic segmentation,
unlike in image classification applications where the
main output is the primary goal, pixel-level accuracy
is needed, and a way to transfer the detected features
when they are processed at different encoder stages
back to the pixel domain is required (Ronneberger
et al., 2015). The encoder part of the U-net struc-
ture, depicted in Fig. 1, usually employs an exist-
ing classification network like VGG or ResNet (He
et al., 2015). This component uses a layer of convo-
lution block made up of several numbers of convo-
lutions each of which is followed by down sampling
max pooling to extract multi-level features from the
input image. The decoder, which forms the second
half of the U-net, should be able to generate an out-
put map that is high in resolution and semantic con-
tent from a set of lower-resolution features obtained
by the encoder section. This process involves; up-
sampling operations on the feature maps; concatena-
tion of features; and more convolutional operations to
obtain per-pixel density maps.
2 METHODOLOGY
In this section, we explain our approach to solve the
GPR problem using HMC and Neural Network.
2.1 Selecting a Temp
To generate our GPR data we have used a forward
model simulation. The usual procedure for GPR im-
age reconstruction involves performing time evolu-
tion of a simulated source using Finite Time Dif-
ference Methods (FDTD) to simulate wave propaga-
tion for a candidate source distribution. Although
more efficient approaches using other methods such
as Runge-Kutta schemes, (WAN, 2020) have been de-
veloped, these methods are often time-consuming and
resource-intensive. Therefore, in this study, we use a
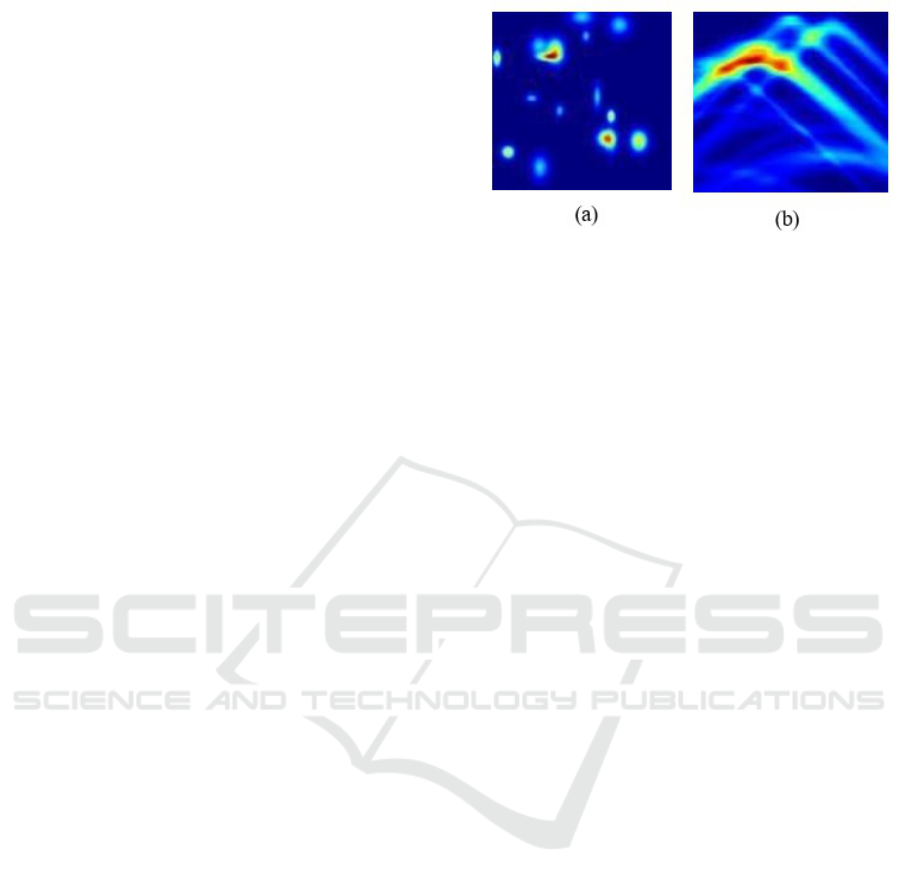
Figure 2: GPR image, (a) Forward model obtained from
Object Image (b) Object Image.
simplified method based on simple wave propagation
equations to build a forward model, that is, a simu-
lation of the resulting GPR image produced by a pro-
posed source. The resulting forward image will be
modelled by the equation (1).
A(r) = A
0
P(2∆t)e
−
2γr (1)
Where γ is a dampening constant depending on
the media properties, r is the Euclidean distance from
the GPR to each source and DT = r /u, where u is
the speed of light in the media, is the time taken to
travel from the GPR to the source. In the equation
above, the reader will recognize the typical equation
of an over-damped harmonic oscillator (hyperbolic
equations). This is the result of considering only the
evolution of the amplitude of the wave with time and
omitting all the imaginary terms that result in more
complicated interactions like destructive interference.
Other usual effects in this field like refraction caused
by water droplets in the media have also been omitted
here and introduced in a simplified way in the source
model as Gaussian noise. The equation above can be
rewritten as propagator equation D = G · F where F
is the pixel-wise map of sources, G is the wave prop-
agator given by A(r) and D is the resulting image in
the GPR. We call the resulting image forward model
as shown in Fig 2 (a) and (b).
2.2 Hamiltonian Monte Carlo
Details of the Hamiltonian Monte Carlo method can
be found in (Betancourt, 2018). As usual, our Hamil-
tonian is the resulting sum of potential and kinetic
energy functions, where kinetic energy is indepen-
dent of spatial coordinates and potential energy is
independent of momentum coordinates 1. Momen-
tum values are generated pixel-wise with random nor-
mal distribution, with a standard deviation dependent
on the temperature of the system. The kinetic en-
ergy is then calculated as the classical kinetic energy
considering the identity as a mass matrix, therefore,
Enhancing Parameters Estimation in Subsurface Imaging with Ground Penetrating Radars
155

K(p
)
= 1/2pp2. The potential function is our ob-
jective function and it is through the gradient of the
potential that our state converges to the typical set.
The potential energy is calculated as the squared error
V (q) = 1/2(DGF)2 where D is the real forward im-
age, G is the propagator of the problem as described
above, and F is the current state of the HMC chain. At
each iteration, a new Hamiltonian resulting from new
kinetic and potential energies is calculated. The re-
sulting Hamiltonian evolves in time with the leapfrog
integration method.
For 0 ≤ n <
T
E
do
A ← A − E δV (q
n+
1
2
)δq
n
q
n+1
← q
n
+ E p
n+
1
2
A
n+
1
2
← A
n+
1
2
− 2δq(a
n
+ q)
End For.
Where T is the total time evolved and E is the
step size. This simple method allows us to evolve the
Hamiltonian in time following a path that minimizes
its action, as described by Hamilton equations. Note
that if K and V are scleronomic, Hamilton equations
reduce to
dq
dt
=
δK(p)
δp
(2)
d p
dt
=
δV (q)
δq
(3)
Which bears similarity to the leapfrog algorithm.
The forward image used for the HMC method was
of size 64 × 64 and was generated using the forward
model described above for 1, 3 and 50 sources. The
simplified single-source scenario was used to build
and tune hyperparameters for the HMC model. Hy-
perparameters in HMC govern the evolution of the
state and its convergence to the typical set. These
parameters are typically referred to as Temperature
and step size, where the former governs the amount
of chaos or variation introduced to the system at each
iteration, and the latter is the step size used in the
leapfrog integrator to calculate the variation of the
Hamiltonian at each integration step. One of the diffi-
culties of the HMC method is to use optimal parame-
ters for convergence, which depend on the typical set
and the nature of the problem. In addition to the ones
described above, it is also useful to find a good seed to
allow for faster convergence. To find the best values
for these parameters (T, step size, seed) an exhaustive
search over common parameter ranges was conducted
in the iris-cluster (Varrette et al., 2014). After find-
ing the best set of parameters, we run the HMC for
10,000 iterations for 1, 3 and 50 initial sources. To
compare the final states to the initial simulation we
perform a structural similarity test on the final states
smoothed with a Gaussian filter. For completeness,
we also compare the initial simulation and the final
HMC state with a full waveform inversion model ob-
tained using back projection.
2.3 Neural Networks approach
As we see the in GPR data (see Fig. 2 & 3) every pixel
intensity defines the reflectivity and shows the object
property. It means we have to predict the exact values
of these pixels to find the objects. Traditionally U-net
is used for segmentation and assigns class labels to
each pixel. But in our case, it is more of a regression
problem to predict the reflectivity values of pixels.
• Neural Networks Architecture: The network ar-
chitecture, inspired by U-net as illustrated in Fig.
1, consists of two main pathways: PATH A has
elements that compress, control or confine: re-
gressive, directive and enclosed (left side of the
figure), PATH B has elements that open up, en-
courage, and set free: progressive, persuasive and
most encompassing (right side of the figure). The
compressive path is implemented with the general
architecture of a convolutional network. It suc-
cessively performs two convolutions of 3x3 with
the same padding and uses the ReLU activation
function; and then a max pooling of 2x2 with
a stride of 2 for down sampling. Thus, in the
down-sampling processes, the number of chan-
nels is doubled while the size of the feature maps
is reduced. Steps of the expansive path are up-
sampling the feature map, then followed by a con-
volution operation with a 2 x 2 filter, which is also
known as up-convolution that reduces the num-
ber of channels in the feature map by two at that
step. Which is then concatenated to a feature map
extracted from the compressive path at the same
level but with precise cropping. Two 3 x 3 con-
volutions and ReLU are next to each other, one
convolution is followed by ReLU. The cropping
is needed because the convolution operation crops
out a portion of the border in each instance of the
feature map. The network ends with a 1x1 convo-
lution layer at the last stage that transforms each
64-element vector into the output. Blue rectan-
gles denote the multi-channel feature maps. Next
to each rectangular figure, there is a number that
represents the number of channels; the x-y dimen-
sions are also provided in the lower left corner.
White rectangles are the duplicative feature maps
as indicated below. Some of the operations are
IC3Com 2024 - International Conference on Cognitive & Cloud Computing
156
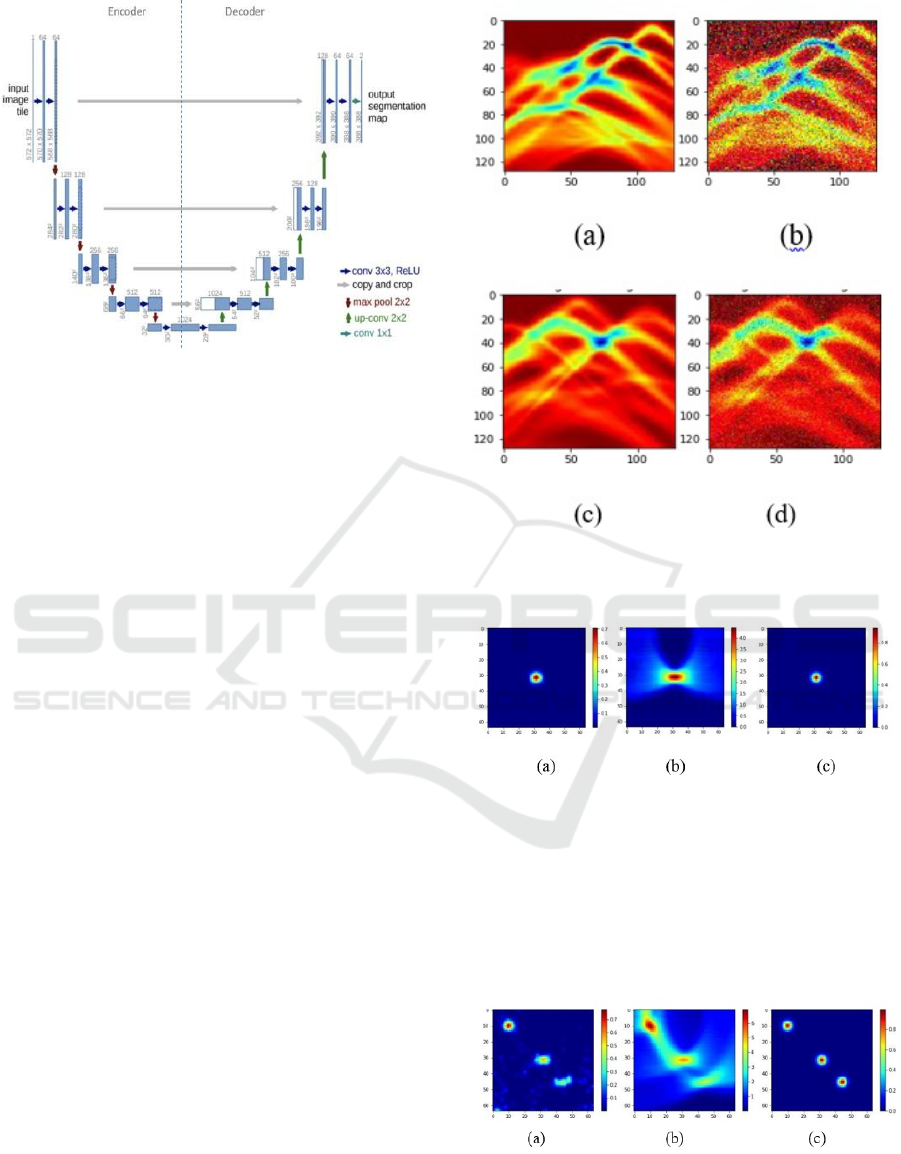
Figure 3: U-net architecture (example for 32x32 pixels in
the lowest resolution).
shown by the arrows linking these elements.
• Training: The input to the model is, image pairs
consisting of the input image and the object map
of the same image. Indeed we use stochastic gra-
dient descent for the training implementation. The
input images underlying our filters are of the di-
mension 128 x 128 pixels. For better detail cap-
turing, the batch size is selected to be 32 and the
learning rate is 1e-4. As for the loss function,
since our objective is less about trying to catego-
rize data as it is to predict it, we use Mean Squared
Error (MSE). It also enables this choice to make
the pixel intensities forecasts more accurate. To
effectively capture these intensity values, we im-
plement the ReLU function as our non-linear ac-
tivation. We have also added dropouts 0.4 to stop
overfit.
MSE = L
D
(x
i
− y
i
)
2
(4)
• Data Augmentation: It is necessary to build an ap-
propriate level of invariance and robustness in the
network by applying the strategies of data aug-
mentation. We used the augmentations library for
this and added Gaussian noise to the data to make
it robust (Fig. 4).
3 RESULTS
In this section, we discuss our results from HMC and
Neural Network approach.
3.1 HMC
The final state (object image) from the resulting HMC
chain is shown for 1, 3 and 50 sources in Fig. 5 to
Figure 4: Gaussian Noise Augmentation, (a) and (c) rep-
resent the Original image, (b) and (d) represent the Aug-
mented Image.
Figure 5: Left to right for 1 source, (a) Final state of the
HMC chain (b) source image obtained with backpropaga-
tion (c) real (simulated) source image
7 respectively. The resulting forward image of
the final HMC state and the real image for the same
sources are shown in Figures 5 to 10. Table 1 shows
the values of SSI for all sources for both the HMC
result and backpropagation.
Figure 6: Left to right for 3 sources (a) Final state of the
HMC chain (b) source image obtained with backpropaga-
tion (c) real (simulated) source image
Enhancing Parameters Estimation in Subsurface Imaging with Ground Penetrating Radars
157
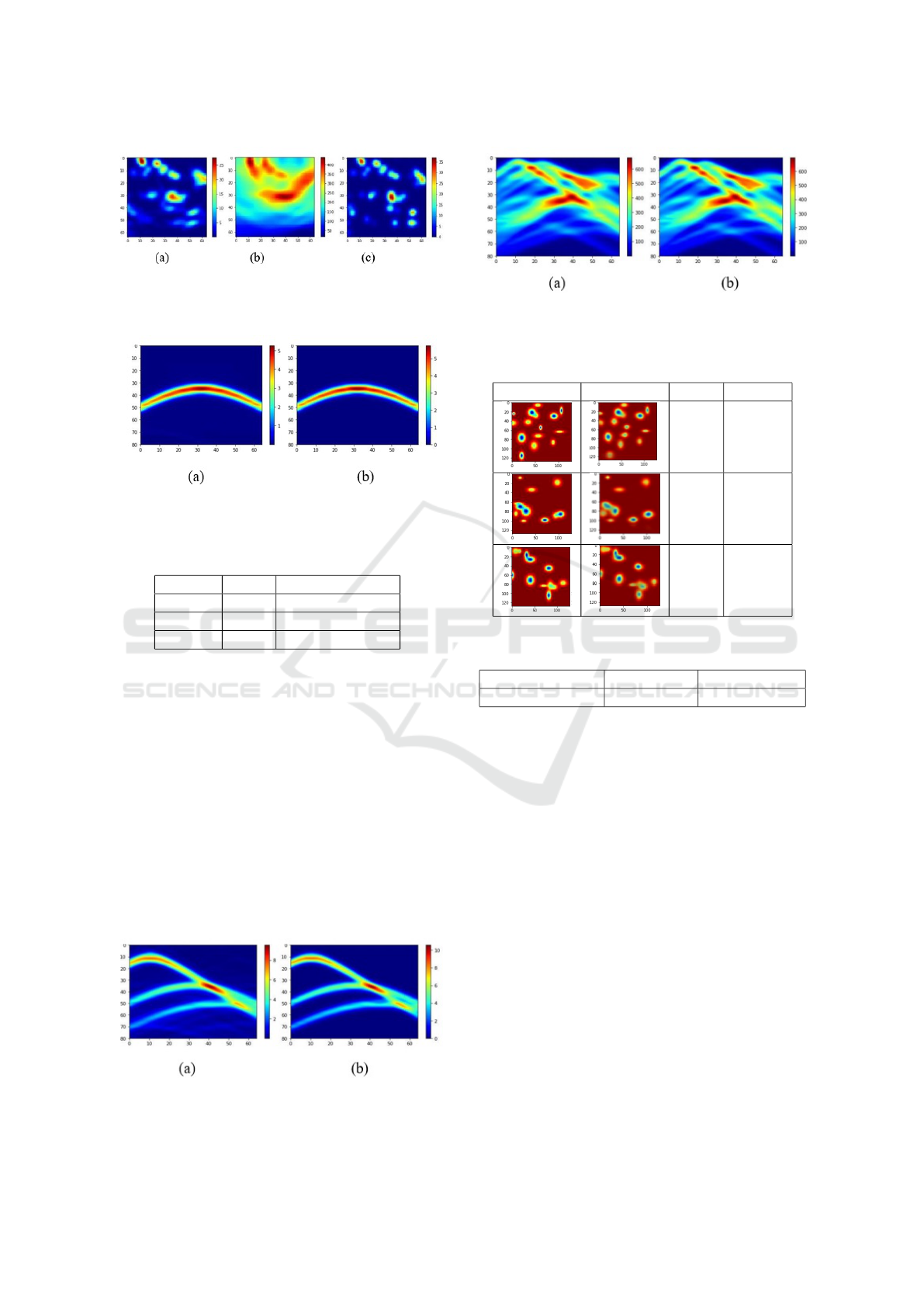
Figure 7: Left to right for 50 sources: (a) Final state of the
HMC chain (b) source image obtained with backpropaga-
tion (c) real (simulated) source image
Figure 8: From left to right for 1 source, (a) the forward
image of the HMC final state and (b) the forward image of
the real source image
Table 1: SSI values for deferent numbers of sources.
Sources HMC Backpropagation
1 0.99 0.31
3 0.84 0.05
50 0.52 0.006
3.1.1 Neural Network
Table 2, shows the results from neural network pre-
dictions. We used the Multi-Scale Structural Simi-
larity Index (MSSIM) and Structural Similarity Index
(SSIM) to compare matrices (Higher values are bet-
ter). The table presents the mean values of the Multi-
Scale Structural Similarity Index (MSSIM) and Struc-
tural Similarity Index (SSIM) achieved by the U-net
model on the test data. These metrics quantify how
similar the U-net’s predicted object images are to the
ground truth images, with higher values indicating
better structural similarity and, consequently, better
performance.
Figure 9: From left to right for 3 sources: forward image of
the HMC final state, forward image of the real source image
Figure 10: From left to right for 50 sources: forward image
of the HMC final state, forward image of the real source
image
Table 2: Prediction result.
Label Prediction SSIM MSSIM
0.99 0.94
0.99 0.95
0.99 0.95
Table 3: Shows the mean values of SSIM and MSSIM on
test data.
Test data number Mean SSIM Mean MSSIM
1000 0.99 0.93
The purpose of Table 3, is two-fold: first, it evalu-
ates the generalization performance of the trained U-
net model by reporting its mean SSIM and MSSIM
scores on a separate test dataset of 1000 samples. This
demonstrates the model’s ability to perform well on
unseen GPR data. Second, it provides a direct com-
parison point with the HMC results reported in Ta-
ble I, allowing the reader to appreciate the relative
strengths of the U-net approach, especially in scenar-
ios with many sources where the HMC method’s per-
formance declines.
Likewise, from the results presented in Table III
that demonstrate high mean SSIM and MSSIM on the
test data, confidence can be gained with the proposed
U-net for subsurface imaging with GPR data. It sup-
ports the authors’ assertion that the U-net model is
more suitable for handling several sources of com-
plexity in the capturing of data than the HMC tech-
nique. In general, Table III is instrumental in measur-
ing the generalization capability of the U-net model
and provides valuable insight into this study; it un-
derscores the U-net model’s capacity to obtain highly
IC3Com 2024 - International Conference on Cognitive & Cloud Computing
158

accurate results in detecting subsurface sources in un-
seen data.
4 COMPUTATIONAL COST
ANALYSIS
However, besides the comparison of the performance,
the computational costs of the HMC and U-net should
be compared as well, since they play a critical role in
determining the feasibility of these approaches’ appli-
cation in practice.
4.1 Time Complexity
The Hamiltonian Monte Carlo (HMC) is an iterative
sampling tactic, and the time-consuming option in-
creases with the number of iterations needed to reach
convergence. Further, due to the high dimensions in-
duced by the number of pixels in the GPR image,
HMC’s time complexity becomes high. On the other
hand, the U-net neural network approach once trained
can predict in a single forward pass and hence the time
complexity will be constant irrespective of the input
size/complexity.
4.2 Resource Requirements
Dew Fletcher indeed pointed out that HMC is a com-
putationally dense method, especially for problems
with high dimensionality. Depending on the size of
the objective function and the number of parameters
there can be a high computational cost, computations
of the objective function and its gradients are needed
in each iteration which may be expensive and can re-
quire parallel computing resources or special purpose
hardware acceleration.
On the other hand, the U-net model even though
it may be time-consuming during training, can take
advantage of the parallelism that modern GPU offers
for inference. The evaluation of the model shows that
it can construct a prediction system based on the new
data with relatively low overhead helping to reduce
the computational load and increase the efficiency of
the solution for deployment.
4.3 Practical Implications
Therefore, near real-time predictions are mandatory,
such as in real-life applications of GPR, the constant
time complexity and the insignificant inference over-
head of the U-net model seem to be concomitantly
beneficial. Also, it is crucial to note that the actual-
ization of the model requires flexibility in the choice
of deployment mechanism.When the trained U-net
model is concluded on resource limited devices or
edge computing platforms, it makes the model very
suitable for use.
However, for situations where the distinction be-
tween different categories is important or the results
need to be presented and analyzed statistically the
HMC method may seem preferable. Covariance and
the ability to follow the Markov Chain means that the
changes in each pixel and the statistical properties in
the image such as the value distribution can be ana-
lyzed and this could prove useful in research and anal-
ysis oriented applications.
However, it is necessary to emphasize that when
choosing between computational cost and accuracy,
one should think more about the special conditions
of the particular application. In cases where there is
ample computation to be done and where exact so-
lutions are desired the HMC method could be used
though it has been mentioned to be computationally
more expensive. On the other hand, where informa-
tion is in limited supply or time is critical and near
real time predictions are necessary then perhaps the
U-net model despite having slightly less interpretabil-
ity may be more beneficial.
5 CONCLUSION
It can be observed that the usage of U-net NN has
enhanced the results as compared to HMC. This im-
provement however is not without a downside since
Unet requires a large amount of data to train the model
and HMC does not. HMC also enables tracking
the changes in each single pixel through the Markov
Chain thus enabling statistical calculation such as
variance and value distribution for each single pixel,
which Unet does not enable because it was unde-
fined. Further investigations might attempt to use a
hybrid method combining both techniques, as well
as a more complex forward model with interactions
between wavefronts and more dispersion effects with
the underground media.
REFERENCES
(2020). An interpolating scaling functions method with
low-storage five-stage fourth-order explicit runge-
kutta schemes for 3d ground penetrating radar simula-
tion. Journal of Applied Geophysics, 180:104128.
Betancourt, M. (2018). A conceptual introduction to hamil-
tonian monte carlo.
Duane, S., Kennedy, A., Pendleton, B. J., and Roweth,
Enhancing Parameters Estimation in Subsurface Imaging with Ground Penetrating Radars
159

D. (1987). Hybrid monte carlo. Physics Letters B,
195(2):216–222.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition.
Hunziker, J., Laloy, E., and Linde, N. (2019). Bayesian full-
waveform tomography with application to crosshole
ground penetrating radar data. Geophysical Journal
International, 218(2):913–931.
Qin, H., Xie, X., Vrugt, J. A., Zeng, K., and Hong, G.
(2016). Underground structure defect detection and
reconstruction using crosshole gpr and bayesian wave-
form inversion. Automation in Construction, 68:156–
169.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. arXiv e-prints, page arXiv:1505.04597.
Varrette, S., Bouvry, P., Cartiaux, H., and Georgatos, F.
(2014). Management of an academic hpc cluster: The
ul experience. In 2014 International Conference on
High Performance Computing Simulation (HPCS),
pages 959–967.
IC3Com 2024 - International Conference on Cognitive & Cloud Computing
160
