
Enhance Equity in Agricultural Economic Interest Groups
Pascal Francois Faye
1 a
, Daba Dieng
2
, Jeanne Ana Awa Faye
3
and Mariane Senghor
1
1
Dept. Mathematics and Computer Sciences, University of Sine Saloum El Hadj Ibrahima NIASS (USSEIN),
Kaolack, Senegal
2
Dept. Applied Mathematics and Computer Sciences, University of Cheikh Amidou KANE (UNCHK), Dakar, Senegal
3
Institut of Management Public et Gouvernance Territoriale, University of Aix-Marseille, Marseille, France
Keywords:
Farmers’ Collaboration, Dynamic Collaborations, Coalition Formation, Stable Coalition, Data Analysis.
Abstract:
In agriculture, several structures are set up as cooperative or economic interest group (EIG). However, these
structures have a set of limits such as the access to finance, to national and international markets, etc. In
addition, they do not care about gender balance or farmers’ vulnerability (climate, education, disability, age,
fitness, assets, communication channels, socio-cultural norms, prejudice, ethnicity, etc.). This work provides
a Citizen Support and Solidarity (CSS) mechanism in a context of self-interested farmers (agents) in unstable
and uncertain context (interests, availabilities, interdependencies, etc.) where we consider each EIG or each
cooperative as a coalition. CSS proposes a core-stable, auto-stabilizing coalition formation mechanism which
maximizes social welfare, and converges gradually to near optimal results. CSS combines game theory meth-
ods and the laws of probability. Our experiments and their analysis demonstrate the efficiency of CSS.
1 INTRODUCTION
In Senegal, many social communities are set up as co-
operative, economic interest group (EIG), etc. with
interdependency that can allow them to access to
finance, to national and international markets, etc.
Moreover, they do not take into account the gender
balance or the farmers’ vulnerability (climate, edu-
cation, disability, age, fitness, assets, communication
channels, socio-cultural norms, prejudice, ethnicity,
etc.).
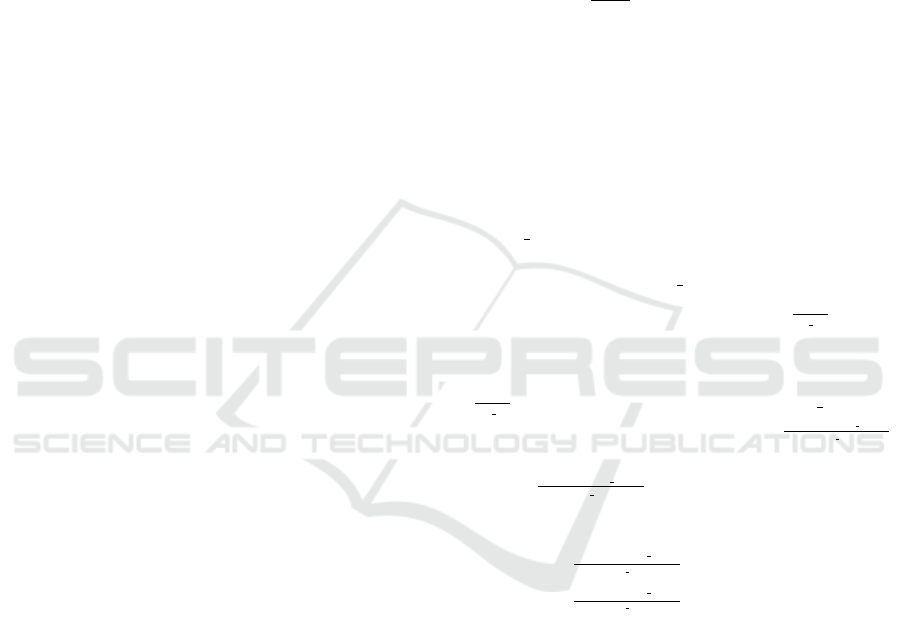
Figure 1: Required supports and ecosystem for farmers.
This suggests new challenges for collaboration be-
tween farmers, where we can consider each EIG or a
cooperative as a coalition. In game theory, a coalition
a
https://orcid.org/0000-0002-2078-5891
is typically a set of agents which have decided to join
together for a limited period of time, to cooperatively
reach a set of goals. In our real world context, an
agent can be deployed on a personal device (smart-
phone, laptop, etc.) of a farmer which must assist
through climate information access, financial infor-
mation, coordination in an EIG (coalitions), etc. The
goal of each farmer is to join a coalition that max-
imises its benefits and minimises the costs incurred
or the vulnerabilities. Indeed, different coalition for-
mation mechanisms have been studied, most of them
assume that - a stable coalition structure can be com-
puted - the coalition formation process is not inter-
rupted or broken before fitting goals - tasks do not
evolve during the coalition’s lifetime. In some real-
world environments, these assumptions do not hold,
for example, when agents face uncertainties about the
information they receive or about their dependencies.
For example, in an EIG we can have any given struc-
ture such as farms’ association, non-governmental or-
ganization (NGO), a set of singletons (non connected
farmer, non associated farmers, a farmer who is not in
an EIG, etc.) and farmers with vulnerability factors
who can act together in order to establish a coopera-
tion strategy. Thus, a farmer can remain without some
useful information or without a teammate to obtain
required funding or resource (eligible crops, equip-
Faye, P. F., Dieng, D., Faye, J. A. A. and Senghor, M.
Enhance Equity in Agricultural Economic Interest Groups.
DOI: 10.5220/0013044200003893
In Proceedings of the 14th International Conference on Operations Research and Enterprise Systems (ICORES 2025), pages 199-206
ISBN: 978-989-758-732-0; ISSN: 2184-4372
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
199

ment of farm production, etc.) and has only a limited
knowledge of the distribution of the resources and the
available funds.
In this work, the main contribution is to pro-
vide a coalition formation mechanism denoted Citizen
Support and Solidarity (CSS) mechanism in uncer-
tain context (farmers’ vulnerabilities, gender balance,
resource availability and interdependencies among
farmers) which can dynamically form and maintain
stable coalitions by:
• managing singletons or vulnerabilities in a decen-
tralized way following the needs of the coalitions;
• organizing the grouping and/or the tutoring of sin-
gletons following the needs of the coalition(s) or
the equity strategy to form core-stable coalition
like in (Faye et al., 2015).
• managing the dynamic merging or splitting of
coalitions by allowing the maintenance of the
tutelage or to break the tutelage of singletons to
form core-stable coalition(s).
CSS mechanism is based on a multilateral nego-
tiation in which control and decision-making are de-
centralized to enable A-core (Auto-stabilizing Core-
stable) coalitions when it is required to deal with the
uncertainties. It combines:
1. laws of probability to model the dynamics and un-
predictable events;
2. machine learning (ML) algorithms to find the bet-
ter decision making and similarities;
3. game theory methods to form coalitions.
The remainder of this paper is organized as fol-
lows: Section 2 provides an overview of the works in
the same field. Section 3 highlights our coalition for-
mation mechanism. Section 4 gives an analysis and
performance evaluations of our CSS mechanism. Sec-
tion 5 concludes this study.
2 STATE OF THE ART
In (Zingade et al., 2018), the authors have presented
an android based application and an internet site that
uses Machine learning methods to predict the fore-
most profitable crop in the current weather and soil
conditions and with current environmental conditions.
This system helps the farmers with a sort of option
for the crops that will be cultivated, which will be
helping them over the long run. Usually, smart agri-
cultural produces enormous quantities of multidimen-
sional time series data and frequent problems with the
smart agricultural’s IOT devices. In order to solve
the issues (Cheng et al., 2022) proposes an anomaly
detection model that can handle these multidimen-
sional time series data. In (Faye et al., 2024) au-
thors proposes a model called AIMS (Agricultural In-
formation and Management System) based on some
Machine Learning (ML) algorithm which describes
both a multi-agent system and Internet Of Things de-
vice that ensures data collection and control as well
as a data monitoring system via a web platform for
decision-making support. This in cases where agents’
collaboration are needed for efficient tasks’ execution
(e. g. data processing and decision making) in a dy-
namic and uncertain context.
In (Klusch and Gerber, 2002), a dynamic coalition
formation mechanism (DCF-A) is proposed, to enable
rational agents to react to events which occur dynami-
cally. In DCF-A, each formed coalition is represented
by a distinguished agent acting as the coalition leader.
The leader examines coalition adjustments by build-
ing hypothetical re-configurations and evaluating the
risk of adding and removing coalition members. If the
leader identifies a significant improvement in coali-
tion value (by simulation), it informs the members
about the alternatives. In turn, the agents send their
own estimations. Then, the agents and the leader be-
gin a negotiation phase to re-configure the coalition.
However, the leaders are sensitive central points and
there is no mechanism to manage their unavailability.
In addition, the agents in DCF-A are considered not
self-interested and always available. Coalition forma-
tion in dynamic environments with dynamic tasks are
dealt with in (Khan et al., 2011). That work uses
MDPs to determine (deterministic) tasks’ evolution.
However, that study does not consider agent unavail-
ability or the stability of coalitions during tasks’ ex-
ecution. Further, in contrast to our work, it assumes
that agents are homogeneous and cooperative.
By using graph theory concepts, (Sless et al.,
2014) addresses the problems of computing coali-
tion structures that maximize social welfare, and core-
stable coalition structures in situations where the
coalitions and their values indicating the strength of
relationships between agents is determined by a social
network. However, it is assumed that, a central orga-
nizer builds coalition structures by using a function
mapping agents to their coalitions in order to carry
out a given set of tasks. In addition, it is possible for
this central organizer to create new relationships be-
tween agents to adapt the game and it doesn’t require
that agents in a coalition form a connected component
in the corresponding social network.
In contrast to our work, we aim to set up a
coalitions’ migration (Citizen Support and Solidar-
ity coalition) mechanism that allows the emergence
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
200
and maintenance of stable coalitions of self-interested
agents in an uncertain context.
3 OUR CONTRIBUTION
3.1 Basic Concepts
To model our context with game theory methods, we
assume that, a farmer is an agent. Let A={a
1
,...,a
n
}
be the set of agents and C be a coalition such as
C={A
c
,G
c
,P
c
,V
c
}. A
c
={a
1
,a
2
,...,a
k
}: A
c
⊂ A is a
set of agents with a set of goals G
c
⊆ {G
a
i
: i ∈
N, a
i
∈ A}. P
c
is the set of preferences due to
agents’ vulnerabilities in C and V
c
is the expected pay-
off value with the coalition. P
c
={Θ
P
c
,S
P
c
}, where
Θ
P
c
={p
1
, p
2
,..., p
n
} comprises one or more prefer-
ences p
i
and S
P
c
={S
t1
,S
t2
,...S
tn
} is the set of prefer-
ences’ constraints (low,middle or hight).
C receives a payoff value V
c
and for each agent a
i
to a
share v
a
i
of V
c
, where V
c
=
∑
a
i
∈c
v
a
i
.
Due to the context with which we deal,
each agent is constrained by the parameters:
{P
a
i
,CDD
a
i
,ϑ
a
i
,U
a
i
,L
Net
a
i
}. P
a
i
is its pref-
erence(s). CDD
a
i
is its contract set which
consists of the set of f ixed − term contracts
(∪
|A
′
|
j=1
FTC
a
i
,a
j
: A
′
⊆ A). A fixed-term contract
FTC
a
i
,a
j
=({Contract
a
i
,a
j
},{T
a
i
hel p
,T
a
j
hel p
}) is a persis-
tent agreement between agents a
i
and a
j
in which
they establish mutual commitment to cooperate with
their preferences and share information during a time
period. The f ixed − term contract above specify
that, a
i
commits a contract Contract
a
i
,a
j
with a
j
during a time period T
a
i
hel p
and a time period T
a
j
hel p
of
a
j
. The aim of the fixed-term contracts is to facilitate
agreements between agents and the stabilisation of
the coalitions by taking into account agents’ vulnera-
bilities. The view ϑ
a
i
of an agent a
i
is the number of
agents of its contact or mailing list (neighbour) with
whom it can directly communicate. For example, if
ϑ
a
i
={(a
j
,x
i, j
),(a
k
,x
i,k
)} then a
j
and a
k
are neighbour
agents of a
i
. The parameters x
i, j
and x
i,k
are boolean
parameters which specify, respectively, whether a
fixed-term contract exists between a
i
, a
j
(x
i, j
=true)
and between a
i
, a
k
(x
i,k
=true). U
a
i
is its private
utility function. U
a
i
=
∑
∞
c=1
u
a
i
c
where u
a
i
c
is the utility
that a
i
tries to maximize through negotiation by
participating in coalition C.
u
a
i
c
= v
a
i
−Cost
a
i
c
(1)
The cost function Cost
a
i
c
and the payoff v
a
i
of a
i
in C are private knowledge, while for each preference
the maximum payoff is a common knowledge. L
Net
a
i
defines its dependence level in a given group (Net).
A fixed-term contract is canceled by an agent if
the reliability of its ally is below some threshold. The
reliability of a
j
is computed by a
i
using the Poisson
law (Yates and Goodman, 2005), which expresses the
prior probability of random events over a time inter-
val t. In our case, the random events are the number
of times that an agent doesn’t respect an established
fixed-term contract. Thus, the reliability of a
j
is:
ρ
a
j
=e
(−λ
a
j
)
∗ (
(λ
a
j
)
k
k!
). The agents are self-interested,
a
i
cannot know the preferences of a
j
and must assume
a
j
prefers staying within fixed-term contracts, which
implies that the a-prior probability of a
j
to break a
fixed-term contract is 0. Hence, k=0 in the reliabil-
ity’s computation:
ρ
a
j
= e
(−λ
a
j
)
(2)
where λ
a
j
is the withdrawal rate of a
j
from FTC
a
i
,a
j
over a time interval t. The withdrawal’ thresh-
old W th depends on the multi-agent application do-
main. If the number of withdrawal of a
j
(NW
a
j
)
from FTC
a
i
,a
j
exceeds W th, then a
i
cancels all fixed-
term contracts with a
j
. Hence, λ
a
j
=
NW
a
j
W th
. How-
ever, a
i
doesn’t need to store λ
a
j
∀ a
j
∈ A. Let
us consider that, ρ
a
j
=0.74, then: e
(−λ
a
j
)
=0.74 ⇒
NW
a
j
W th
=−ln(0.74) ⇒ NW
a
j
=−ln(0.74) ∗ W th. If a
j
does another withdrawal then, ρ
a
j
=e
−(
(−ln(0.74)∗W th)+1
W th
)
or if a
j
successfully cooperates with a
i
then,
ρ
a
j
=e
−(
(−ln(0.74)∗W th)−1
W th
)
. Thus, the relation between
ρ
a
j
and its update ρ
′
a
j
is:
ρ
′
a
j
=
e
−[(−ln(ρ
a
j
)∗W t h)+1]
W th
if NW
a
j
= NW
a
j
+ 1
e
−[(−ln(ρ
a
j
)∗W t h)−1]
W th
if NW
a
j
= NW
a
j
− 1
(3)
Hence, to enhance or conserve its reliability, a
j
∈
A must join and respect its commitments. We identify
three fixed-term contract properties namely equitable,
preferable and non-dominated. A fixed-term contract
FTC
a
i
,a
j
is equitable if it doesn’t constrain a
i
and a
j
,
and it enhances the means to both agents.
FTC
a
i
,a
j
does not constrain an agent means: -
P
a
i
∼ P
a
j
and T
a
i
hel p
∼ T
a
j
hel p
.
FTC
a
i
,a
j
enhances the means ∀a
i
and a
i
∈ A, then:
- P
a
i
∼ P
a
j
∀P
a
i
and ∀P
a
j
∈ FTC
a
i
,a
j
⊆ ∪
|A
′
|
k=1
FTC
a
i
,a
k
:
A
′
⊆ A.
-∀a
i
,a
j
and a
k
∈ A, FTC
a
i
,a
j
∩ FTC
a
i
,a
k
=
/
0.
The fact that, each FTC
a
i
,a
j
of an agent a
i
depends on
T
a
j
hel p
, P
a
j
and ρ
a
j
of its ally a
j
, implies that a
i
can have
a preference between its allies. a
i
may prefer FTC
a
i
,a
j
Enhance Equity in Agricultural Economic Interest Groups
201
over FTC
a
i
,a
k
, e.g., because a
i
has more confidence in
a
j
than in a
k
. In such a case FTC
a
i
,a
j
is a preferable
fixed-term contract. We denote this preferable fixed-
term contract by: a
j
≻
Al
a
k
.
However, a fixed-term contract may be equi-
table but not preferred. Hence, we define the non-
dominated fixed-term contract as one which is both
equitable and preferable.
We consider that, to maximize its utility, each
agent a
i
has to deal with its dependence level L
Net
a
i
with other agents in a given group (Net). Thus, ∀a
i
∈
Net,∃ L
Net
a
i
such as L
Net
a
i
= {γ
Net
a
i
,H
Net
a
i
,S
Net
a
i
} where
γ
Net
a
i
is the set of leader agents of a
i
, H
Net
a
i
is the set
of agents which have the same importance in Net or
just neighbour without relationship with a
i
and S
Net
a
i
is
the set of agents which have a
i
as a leader agent.
In the next section, we present our Citizen Support
and Solidarity (CSS) mechanism.
3.2 Citizen Support and Solidarity
(CSS) Mechanism
During the asynchronous and decentralized interac-
tions for the CSS, the agents have to deal with uncer-
tainties on their availability, dependence and agree-
ments. An offer from an agent a
i
to an agent a
j
to
join a coalition C of a given structured group Net
A
(a
i
∈ A and a
j
̸∈ A) is Call
a
i
,a
j
=(P
c
,O
a
i
c
) which spec-
ifies the set of preferences and goals (O
a
i
c
) that a
j
is
requested to perform in the coalition C (cf. Fig. 2).
O
a
i
c
is a set of compound offer sent by a
i
which con-
tains a set of multiple offers for a coalition formation
demand. For example, if an agent a
i
∈ C request from
a
j
to provide one or both preferences P
1
and P
2
, the
O
a
i
c
is seem that:
P
1
P
2
δ
a
j
< D
c
δ
a
j
> D
c
δ
a
j
< D
c
δ
a
j
> D
c
reward
a
j
Val
c
reward
a
j
Val
c
- FTC
a
i
,a
j
- FTC
a
i
,a
j
- P
a
j
s
> 0.5 - P
a
j
s
> 0.5
O
a
i
c
=(O
a
i
P
1
,O
a
i
P
2
) such as O
a
i
P
1
={δ
a
j
<
D
c
,reward
a
j
,−,−},{δ
a
j
> D
c
,Val
c
,FTC
a
i
,a
j
,P
a
j
s
>
0.5} and O
a
i
P
2
={δ
a
j
< D
c
,reward
a
j
,−,−},{δ
a
j
>
D
c
,Val
c
,FTC
a
i
,a
j
,P
a
j
s
> 0.5} Where D
c
is the time
for the coalition and δ
a
j
is a
j
time spent in the
coalition. This means that, if a
j
agrees to join C
during a remaining time δ
a
j
< D
c
and to provide the
preference P
1
⊆ P
a
j
then it obtains only a reward
reward
a
j
. Nonetheless, if a
j
joins C during a re-
maining time δ
a
j
> D
c
then it obtains the maximum
reward Val
c
and a fixed-term contract FTC
a
i
,a
j
if it
ensures a probable stability P
a
j
s
> 0.5.
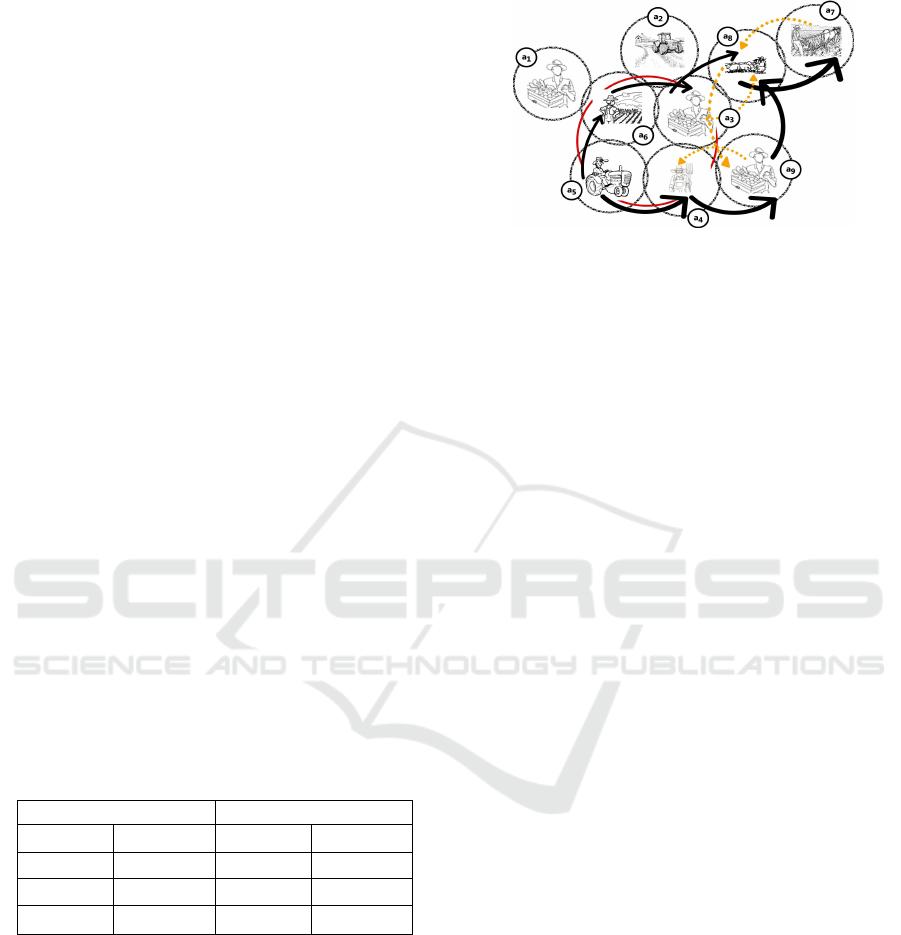
Figure 2: Spread of the offer message Call
a
i
,a
j
by a
5
know-
ing that A
c
={a
3
,a
4
,a
5
,a
6
} and local negotiation with sin-
gleton of the neighbourhood.
Here, we use compound offers because in our con-
text where we suppose that the agents are spread in
electronic devices we try to enhance the sharing in-
formation and to reduce the quantity of messages ex-
changed during the negotiations seen that the sending
of messages is more expensive than the mental analy-
sis or oral communication regarding energy used. The
second justification is strategic because by spreading
out the offers it is easier for the agents to compare
their utility between offers and also it allows to re-
duce the egoism of the agents because the offers are
spread out so that if an agent wants to obtain a max-
imal utility, he has to share information, preferences,
and give more guarantee. Also, we allow an agent
a
i
to propose such compound offer because an agent
does not know the utility function and preferences of
other agents a
j
. An agent a
i
may propose a different
fixed-term contract and reward for each offer in its O
a
i
c
and for each agent a
j
.
An agent a
j
has the following utility function
which it tries to maximize.
u
a
j
c
= reward
a
j
−Cost
a
j
c
(4)
We assume that, the cost function Cost
a
j
c
and
the reward
a
j
of an agent a
j
in a coalition C are
private information, while the maximum reward af-
ter tasks’ achievement depending on the preference
is a common knowledge. An agent a
j
may de-
cide to accept (Accept(Call
a
i
,a
j
)), counter-propose
(Counter(Call
a
i
,a
j
)), reject (Reject(Call
a
i
,a
j
)) or ig-
nore a
i
’s offer (O
a
i
c
).
Alternatively, a
j
can counseling a
i
(Council(a
i
))
on how to modify O
a
i
c
in order to enhance the ability
of a
i
to get an agreement with another agent. When
accepting or counter offering, an agent must specify
an offer (instead of a compound one) from the set of
received offers.
For example, in the offer O
a
i
c
if a
j
ac-
cept only the constraint of O
a
i
P
1
and has
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
202
P
a
j
s
> 0.5 then Accept(Call
a
i
,a
j
)=(O
a
i
P
1
,P
a
j
s
). A
counter-propose which concerns O
a
i
P
1
is such as
Counter(Call
a
i
,a
j
)=(O
a
i
P
1
,P
a
j
s
).
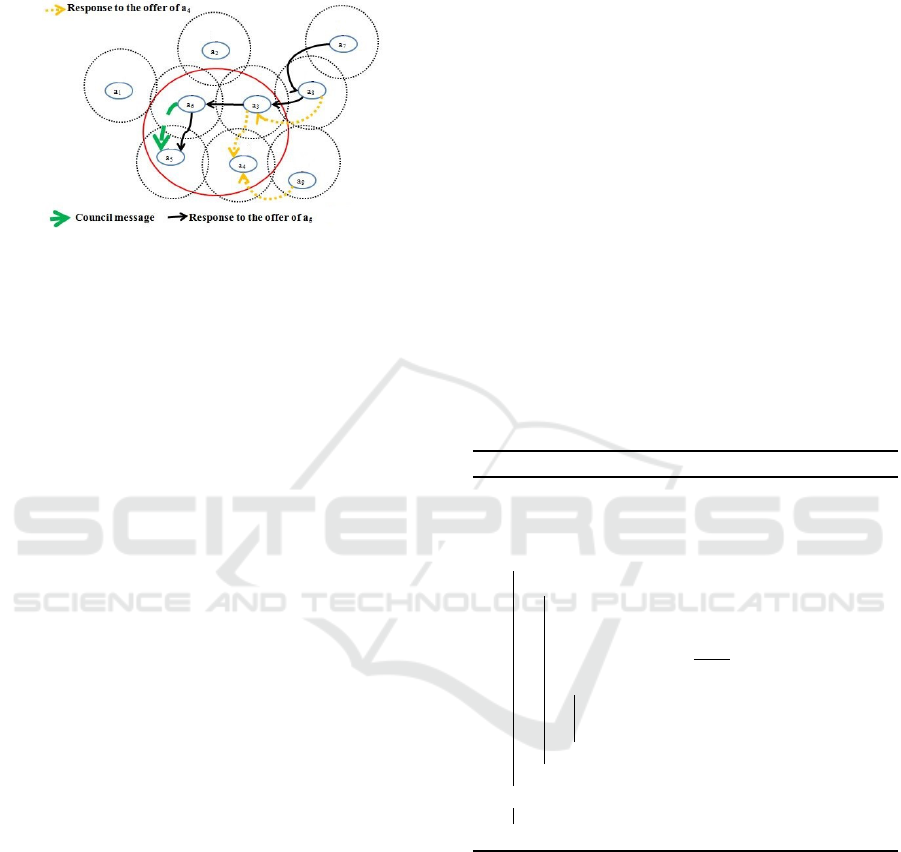
Figure 3: responses to the Call
a
i
,a
j
A Reject(Call
a
i
,a
j
) means that a
j
has the required
preference(s) but it refuses the offers because its pref-
erence(s) is (are) not available yet or it has a better
utility with another agent. As, a rejection of an of-
fer may be due to a bad assessment or ignorance on
which offer’s constraints may be acceptable for the
singleton, a
j
can counseling a
i
by proposing another
O
a
j
c
to a
i
to enhance an offer that does not make an
agent in C worse off:
(1) It provides a better utility (u
a
i
c
′
≥ u
a
i
c
: C
′
=C ∪ a
j
)
for each a
i
∈ C,
(2) each fixed-term contract in O
a
j
c
is equitable.
(3) a
j
can counseling a
i
if it exists a fixed-term
contract between both agents or if it exist an
agent a
k
which has a fixed-term contract with a
i
which can grant a
j
otherwise a
i
ignore the coun-
seling. The formal expression of a counseling is:
Council(a
i
)=(O
a
j
c
,FTC
a
i
,a
j
).
Note that, a singleton a
j
can initiate a request for
joining a given coalition C. In this case, the sin-
gleton a
j
must specify the set of preference(s) P
a
j
it is ready to contribute in C and its probable sta-
bility P
a
j
s
. To do that a
j
uses the following for-
mal expression: Recall
a
j
,a
i
=(P
a
j
,P
a
j
s
). An agent a
i
∈
C can accept this a
j
’s request by an acknowledge
Accept(Recall
a
j
,a
i
)=(O
a
i
P
a
j
) in order to highlight the
required constraints or refuse a
j
’s request by an ac-
knowledge Re f use(Recall
a
j
,a
i
).
If an agent a
i
∈ A
c
has more than one acceptation,
it must follow:
(1) Choose the singleton a
j
with the higher probable
stability P
a
j
s
.
(2) Choose the singleton a
j
which guarantees a higher
remain time δ
a
j
.
(3) Choose the singleton a
j
with which it has a pre-
vious fixed-term contract FTC
a
i
,a
j
and which has the
higher reliability ρ
a
j
.
(4) Choose the first singleton which has accept.
(5) Send a reject (Reject(Call
a
i
,a
j
)) to the singleton
which is not chosen.
These steps are asynchronous because they can be
started by each agent. For that, each agent in C has
to - check the coalition manageability - synchronize
with other agents about its decision - compute its risk
to loose its utility with a new coalition configuration.
The agents use the probability of ruin ξ
t
C
if it remains
in C at time t. This ruin occurs if its utility U
t
a
i
at time
t becomes lower than U
a
i
. We model the cost as X
k
.
The utility at time t is given by:
U
t
a
i
= U
a
i
+ g
t
−
N
t
∑
k=1
X
k
(5)
U
a
i
is the initial utility, g
t
gain of prefer-
ences added since the beginning of the tasks’
achievement.N
t
is the number of EIG that an agent
knows during the time interval [0, t]. The process N
t
,
t ≥ 0 is a Poisson process with the parameter λ. The
ruin probability can be written as follows:
ξ
t
C
= P(in f
t≥0
U
t
a
i
≤ 0/U
a
i
) (6)
Algorithm 1: Ring creation.
Data: A set of linked singletons S
Net
A
c
a
i
: a
i
∈ A
c
Result: Creation of a ring around the coalition C
∀a
j
∈ A
c
: P
a
j
∈ P
min
⊂ C;
if U
t
a
j
≥ U
a
j
: a
j
∈ A
c
then
if ∃ P
a
j
≡ P
a
k
: a
k
∈ S
Net
A
c
a
i
then
Computes the probability to become
unavailable Q
a
j
s
=(q
a
j
s
)
k
∗ (1 − q
a
j
s
);
Were q
a
j
s
=e
−λ
a
j
∗
(λ
a
j
)
k
k!
;
if Q
a
j
s
̸= 0 and δ
a
j
≤ D
c
then
Send a message Request(a
i
):
a
i
∈ H
Net
A
c
a
j
and a
i
∈ γ
Net
A
c
a
k
end
end
else
Execute Algorithm 2
end
To avoid risk to loose its utility, an agent must
keep the average cost of tasks in terms of prefer-
ences used per time unit under a critical threshold p.
Thus, if the coalition remains Nash stable (the task(s)
is(are) well managed and each agent remains agreed
(U
t
a
i
≥ U
a
i
) with the coalition C) the configuration is
committed by an Syn() message. However:
(a) the problem can be only localized in the agent
which has requested to link singleton(s). Hence, no
synchronizing message is required.
(b) the linked singleton(s) can be shared by the agents
of the same coalition for example, if a set of linked
Enhance Equity in Agricultural Economic Interest Groups
203
Algorithm 2: Structuring the singletons such as they do
not hurt an a
i
∈ A
c
.
Data: U
t
a
j
≤ U
a
j
: a
j
∈ A
c
Result: Structuring the set of singletons S
Net
A
c
a
i
∀a
j
∈ A
c
: U
t
a
j
≤ U
a
j
;
if ∃ S
Net
A
c
a
i
: U
t
a
j
≥ U
a
j
: a
i
and a
j
∈ A
c
then
Notice(S
Net
A
c
a
i
) and wait during εt ∈ N
end
if AckNotice(S
Net
A
c
a
i
) then
Computes U
t
a
j
;
if U
t
a
j
≤ U
a
j
then
Algorithm 4
end
else
Algorithm 4
end
Algorithm 3: Auto-grouping the singletons.
Data: Notice(S
Net
A
c
a
i
)
Result: AckNotice(S
Net
A
c
a
i
)
if Notice(S
Net
A
c
a
i
) from a
i
∈ A
c
then
Each a
k
∈ S
Net
A
c
a
i
compute its probable
stability P
a
k
s
;
Each a
k
∈ S
Net
A
c
a
i
computes its U
t
a
k
;
Each a
k
∈ S
Net
A
c
a
i
sends P
a
k
s
and U
t
a
k
to the
a
i
≡ γ
Net
A
c
a
k
;
a
i
sorts its singletons S
Net
A
c
a
i
such as the
Designated agent (DA) a
n
has (Max(U
t
a
n
),
Max(P
a
n
s
)) and the Backup Designated agent
(BDA) a
m
has the next (Max(U
t
a
m
),
Max(P
a
m
s
)): a
n
and a
m
∈ S
Net
A
c
a
i
.;
a
i
sends a AckNotice(S
Net
A
c
a
i
) to singleton in
S
Net
A
c
a
i
and agents in A
c
;
end
singletons which have a set of preferences can be
needed by a set of agents of the coalition.
If the coalition is not Nash stable due to the fact
that an agent a
i
of C will get a lower utility or the
task(s) is (are) not well managed, then a Notice()
message is used by the agents in C. This can lead to
one of the following migration of the configuration:
(c) Structuring the singletons such as they do not hurt
a
i
∈ A
c
(cf. algorithm 2).
(d) Sub-coalition for the singletons which has the
coalition C as a tutor (cf. algorithm 4).
(e) Break the tutoring and create a new coalition
formed by former singletons with maybe a set of
agents of the former coalition C. However, both coali-
tions must be stable (cf. algorithm 5).
Algorithm 4: Create a sub-coalition for the singletons
which has the coalition C as a tutor.
Data: U
t
a
i
≤ U
a
i
: a
i
∈ A
c
Result: sub-coalition (Sub
A
c
) for singletons S
Net
A
c
a
i
which will have C as tutor.
Let us consider that
¯
A
c
is the set of a
j
∈ A
c
:
U
t
a
j
≤ U
a
j
;
a
i
≡ γ
Net
A
c
a
k
∀ a
k
∈ S
Net
A
c
a
i
; a
i
send Probe
¯
A
c
() and
Probe
S
Net
A
c
a
i
();
if Probe
¯
A
c
()==True and Probe
S
Net
A
c
a
i
()==True
and U
t
a
i
≤ U
a
i
then
a
i
sends a message
In f orm(Sub
A
c
) which informs the creation of
Sub
A
c
={S
Net
A
c
a
i
,Rew
Sub
A
c
,
∑
j∈S
Net
A
c
a
i
P
a
j
,(P
Sub
A
c
∈
P
c
)};
∀a
j
∈ A
c
,a
j
≡ γ
Net
A
c
a
k
∀a
k
∈ Sub
A
c
;
∀a
j
∈ A
c
,a
j
send(FTC
a
j
,a
k
∀a
k
∈ Sub
A
c
;
end
if Probe
¯
A
c
()==True and Probe
S
Net
A
c
a
i
()==False
and U
t
a
i
≤ U
a
i
then
a
i
demands a grant process (Grant()) to
motivate a
k
∈ S
Net
A
c
a
i
;
else
a
i
demands the creation of a new coalition
formed by former singletons with maybe a
set of agents of the former coalition C by
Grouping() (algorithm 5);
end
A message AckNotice(S
Net
A
c
a
i
) means the single-
tons has already a given structure after the negotia-
tion of their auto-grouping. However, it must be re-
quired to break the tutoring and to create a new coali-
tion formed by former singletons with maybe a set of
agents of the former coalition C such as both coali-
tions are stable.
(1) A new coalition where members are the former
singletons.
(2) A new coalition which hosts former singletons and
a set of agents of the former coalition.
4 ANALYSE AND
PERFORMANCES
EVALUATIONS
We highlight the properties of CSS that lead to re-
quired, auto-stabilizing core stable coalitions, the
convergence of the negotiations in such dynamic, un-
certain and asynchronous context.
Lemma 1. CSS terminates without deadlock, regard-
less of the existence of a coalition.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
204

Algorithm 5: Break the tutoring and create a new coali-
tion formed by former singletons with maybe a set of
agents of the former coalition C (Grouping()).
Data: Probe
¯
A
c
()==False
Result: Creation of a new coalition C
′
which
emerges from C
∀ a
i
≡ γ
Net
A
c
a
k
computes the stability of Sub
A
c
to form a coalition;
if Sub
A
c
will be stable then
The tutoring is broken and the singletons
establish fixed-term contract between
them;
end
if Sub
A
c
will be not stable then
a
i
≡ γ
Net
A
c
a
k
computes the stability of
Sub
A
c
if it is in Sub
A
c
;
if a
i
can stabilize Sub
A
c
then
∀a
j
∈ A
c
computes the stability of the
coalition C when a
i
∈ A
c
and when
a
i
̸∈ A
c
;
if C remains stable then
a
i
breaks the tutoring and joins
the singletons. Then, they
establish fixed-term contract
between them in order to
manage in decentralized manner
their coalition Sub
A
c
∪ a
i
and to
ensure the stability of Sub
A
c
∪ a
i
;
end
end
end
Proof. ∀Call
a
i
,a
j
of an offer of a
i
or ∀Probe(O
a
i
C
) a
probe message of a
i
, is forwarded if ϑ
t
a
i
̸=
/
0 by re-
specting the pitch deck principle to avoid message
loop back. Each conflict between a
i
and a
j
is man-
aged by the rest of the agents of their network (Net)
by selecting the agent which provides a larger weight
to its network (Net). This avoids the case where a
i
and
a
j
are in an impasse without awareness by the agents
which are awaiting a commitment. Note that, every
conflict resolution is decentralized and localized in
the network (Net) concerned by the conflict (see in
each algorithms). Thus, deadlocks are avoided in the
negotiation. This proves our lemma.□
Definition 1. A set of agents A form a Nash-stable
partition P, if none of the agents in A is motivated to
leave other agents in order to join another partition
P
′
of another set of agents, i.e, ¬(∃ a
i
∈ A : a
i
∈ P,
∃P
′
: P
′
∪ {a
i
} ≻
a
i
P).□
Theorem 1. An AckNotice(S
Net
A
c
a
i
) entails that there
exists a set of agents of a network (Net) which guar-
antees a Nash-stable partition in C.
Proof. Consider W-Set as the set of agents which
responded with an AckNotice(S
Net
A
c
a
i
) in a network
(Net). Consider that, U
t
a
x
is the outcome of the utility
function U
a
x
of a
x
at time t. Also, consider that W
a
i
as
the weight of a
i
depending to its fixed-term contracts.
(1) ∀a
j
, W-Set=W-Set ∪ a
j
if and only if G
a
j
∈ O
a
i
C
and
U
t−1
a
j
⩽ U
t
a
j
. This means ∀a
j
∈ W-Set it has agreed to
join coalition C in offer O
a
i
C
.
(2) ∀a
i
,a
j
∈ W-Set, G
a
i
̸≡ G
a
j
, U
t−1
a
i
⩽ U
t
a
i
and U
t−1
a
j
⩽
U
t
a
j
. This means that, there is no conflict between the
agents in W-Set and each utility is maximized.
(3) ∀ W
a
i
of a
i
∈ W-Set, W
a
i
depends on its fixed-term
contracts of its view ϑ
t
a
i
. In addition, a
i
aims to maxi-
mize its weight and reliability because if it withdraws
from W-Set its weight and reliability will decrease.
(1), (2) and (3) above mean that, ∀a
i
∈ W-Set is not
motivated to deviate from W-Set and has agreed to
join C with each agent in W-Set. Thus, W-Set ⊆ C
is Nash-stable. This proves our lemma.□
Lemma 2. The merging of two W-Set gives also a set
of agents which is a Nash-stable partition in C.
Proof. Consider that W
a
i
as the weight of a
i
depend-
ing to its fixed-term contracts. Also, consider X1 and
X2 two sets of agents of two different network (Net)
which responded with an AckNotice(S
Net
A
c
a
i
). By the-
orem 1, X1 and X2 are both Nash-stables. X1 ∪ X2
is such that X1 ∩ X 2=
/
0. Thus, X1 ∪ X2 is such that
∀a
i
∈ X1 ∪ X2, W
a
i
and utilities are maximized. Thus,
if the merging is a success, each agent maintains
its agreement to join coalition C with each agent in
X1 ∪ X2. This proves our theorem.□
Definition 2. Let us consider CS as a coalition struc-
ture. CS is in the core of a game if no coalition C ∈CS
wants to deviate from CS, i.e, each coalition C earns
at least as much as it can make on its own (utilitarian
social welfare is maximized). This means, C is core
stable.
Theorem 2. CSS convergences toward a core stable
coalitions if the core is not empty.
Proof. Lemma 1 proves that, if a AckNotice(S
Net
A
c
a
i
)
exist for a network (Net), CSS will take it into account
without deadlock. In addition, CSS works even if
some agents are unavailable, the termination is always
guaranteed and each agent has control over the out-
come of CSS regardless the state of other agents. The-
orem 1 implies that, the outcome of CSS is always a
stable coalition. By lemma 2, if an AckNotice(S
Net
A
c
a
i
)
Enhance Equity in Agricultural Economic Interest Groups
205

comes from a network (Net) or from the merging of a
set of network (Net) then, no agent is motivated to
deviate from the outcome. In addition, the utility,
the reliability, the probable stability and the utilitar-
ian social welfare of the set of agents are maximized
because the network (Net) which provides a larger
weight is always preferred. Thus, for each agent’s
offer, the outcome of CSS leads to a coalition where
no agent is motivated to deviate and where the utili-
tarian social welfare is maximized. This proves our
theorem.□
Lemma 3. The outcome of CSS is a coalition C where
each agent has at least one neighbour agent in C.
Proof. By theorem 1 an AckNotice(S
Net
A
c
a
i
) means
that, there exists a set of agents that can form a
Nash-stable partition in C. By lemma 2, each agent
which responds with an AckNotice(S
Net
A
c
a
i
) in a net-
work (Net) or of the merging of a set of network (Net)
has at least one neighbor agent with which it accepts
to form at least a Nash-stable coalition. Thus, if C is
committed due to one or a set of network (Net), each
agent in C has at least one neighbour agent in C. This
completes the proof.□
Theorem 3. If CSS terminates with a formed coali-
tion, that coalition is necessarily A-core and auto-
stabilizing.
Proof. Theorem 2 proves the convergence toward a
core stable coalition. Lemma 3 means that, each event
which dynamically affects tasks and agent availabil-
ity will be detected by at least one agent of the coali-
tion. Lemmas 1 suggests that, after some instability,
a coalition will stabilize after a bounded number of
steps without a deadlock. In addition, the decision to
add a set of agents to the coalition must respect the
preference of each agent of the coalition. Knowing
that, we can formalize the addition of a set of agents
to a coalition as the merging of two W-Set, lemma 2
shows that, CSS enables dynamic stabilization. This
completes the proof.□
5 CONCLUSION
In Senegal, the farmers face with the challenges on
finance, on markets, on the vulnerability factors with
the poor management of the gender balance and the
unequal distribution of agriculture inputs. Farmers are
grouped together in cooperatives or economic inter-
est groups (EIGs) to address these issues. However,
many of them may wish to leave or join these groups
depending on the crop year, skills, preferences, or so-
cial welfare. This work takes into account this con-
text to provide a coalition’s migration mechanism that
enables the rising of core-stable, auto-stabilizing and
asynchronous coalition formation mechanism which
we denote as CSS (Citizen Support and Solidarity).
CSS combines game theory methods and the laws
of probability. Our experiments and their analysis
demonstrate the efficiency of CSS. In the future we
aim to analyse the socio-economic impact of CSS on
local communities by selecting performances metrics
and comparison with traditional methods.
REFERENCES
Cheng, W., andXiaoting Wang, T. M., and Wang,
G. (2022). Anomaly detection for internet of
things time series data using generative adversar-
ial networks with attention mechanism in smart
agriculture. Frontiers in Plant Science, page
https://doi.org/10.3389/fpls.2022.890563.
Faye, P. F., Aknine, S., Sene, M., and Shehory, O. (2015).
Dynamic coalitions formation in dynamic uncertain
environments. International Conference on Web In-
telligence and Intelligent Agent Technology (WI-IAT),
page 273-276.
Faye, P. F., FAYE, J. A., and Senghor, M. (2024). Decen-
tralized intelligence for smart agriculture. In Proceed-
ings of the 16th International Conference on Agents
and Artificial Intelligence (ICAART 2024), 1:240–
247, ISBN 978–989–758–680–4, ISSN 2184–433X.
DOI: 10.5220/0012342100003636.
Khan, M. A., Turgut, D., and B ¨ol ¨oni, L. (2011). Optimizing
coalition formation for tasks with dynamically evolv-
ing rewards and nondeterministic action effects. AA-
MAS, pages 415–438.
Klusch, M. and Gerber, A. (2002). Issues of dynamic coali-
tion formation among rational agents. Intelligent Sys-
tems, IEEE, pages 42–47.
Sless, L., Hazon, N., Kraus, S., and Wooldridge, M. (2014).
Forming coalitions and facilitating relationships for
completing tasks in social networks. AAMAS, pages
261–268.
Yates, R. D. and Goodman, D. J. (2005). Probability
and Stochastic Processes: A Friendly Introduction for
Electrical and Computer Engineers. John Wiley and
Sons, INC, Rutgers, The State University of New Jer-
sey.
Zingade, P. D., Buchade, O., Mehta, N., Ghodekar, S., and
Mehta, C. (2018). Machine learning-based crop pre-
diction system using multi-linear regression. Interna-
tional Journal of Emerging Technology and Computer
Science(IJETCS), pages Vol 3, Issue 2.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
206
