
A Universal Railway Obstacle Detection System Based on Optical-Flow
Guided Semi-Supervised Segmentation
Qiushi Guo, Bin Cao, Dehao Hao, Cheng Wang, Lijun Chen, Peng Yan
China SWJTU Railway Development Co., Ltd(CSRD), China
Keywords:
Obstacles Detection, Railway Security, Deep Learning.
Abstract:
Detecting obstacles in railway scenarios is both crucial and challenging due to the wide range of obstacle
categories and varying ambient conditions such as weather and light. Given the impossibility of encompass-
ing all obstacle categories during the training stage, we address this out-of-distribution (OOD) issue with a
semi-supervised segmentation approach guided by optical flow clues. We reformulate the task as a binary
segmentation problem instead of the traditional object detection approach. To mitigate data shortages, we
generate highly realistic synthetic images using Segment Anything (SAM) and YOLO, eliminating the need
for manual annotation to produce abundant pixel-level annotations. Additionally, we leverage optical flow as
prior knowledge to train the model effectively. Several experiments are conducted, demonstrating the feasibil-
ity and effectiveness of our approach.
1 INTRODUCTION
With the rapid advancement of high-speed trains, en-
suring the security of railway systems has emerged
as a critical public concern. One of the primary chal-
lenges is obstacle detection, which plays a crucial role
in railway safety. The potential obstacles range from
falling rocks to pedestrians, from trucks to animals
and eta. Besides, the scenarios is complex due to un-
predictable environment conditions. Developing a re-
liable and robust obstacle detection system can em-
power train operators and dispatchers to take preemp-
tive actions and mitigate potential accidents.
Deep learning techniques have been widely
adopted across various security domains, including
mobile payments(Cai et al., 2022), remote sens-
ing(Bischke et al., 2019), disaster detection(Sazara
et al., 2019), and fraud detection (Guo et al., 2023).
This technology exhibits substantial promise in en-
hancing railway safety through sophisticated obsta-
cle detection capabilities. Significant efforts have re-
cently been devoted to addressing obstacle detection
using deep learning methods(Brucker et al., 2023;
Lis et al., 2023). Although these approaches have
achieved some success, they also exhibit notable dis-
advantages:
• Fragility to complex ambient conditions.
• Requirement for extensive manual annotations.
Figure 1: The pipeline for synthetic data generation, utiliz-
ing SAM and YOLO to extract target objects from a gallery
and superimpose them onto a base image (specifically, a
railway image). Notably, this process does not necessitate
annotations.
• Difficulty in extending to different scenarios.
Designing an extendable, annotation-free approach
with strong generalization ability remains a signifi-
cant challenge in both industry and academia.
To address the aforementioned issues, we pro-
pose a semi-supervised approach guided by optical
flow. To mitigate the data shortage problem, we em-
ploy SAM (Kirillov et al., 2023) and YOLO (Red-
mon et al., 2016) to generate highly realistic pseudo-
images for training. Instead of manually collecting
and annotating images pixel by pixel, we prepare two
image sets: base images (fewer than 100 background
images with only railway areas annotated) and object
Guo, Q., Cao, B., Hao, D., Wang, C., Chen, L. and Yan, P.
A Universal Railway Obstacle Detection System Based on Optical-Flow Guided Semi-Supervised Segmentation.
DOI: 10.5220/0013057600003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 259-265
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
259

images. The object images include categories such
as pedestrians, animals, vehicles,and textures. The
bounding boxes of above objects can be detected by
YOLO as the prompts for SAM. The pixel-level anno-
tations(masks) can be obtained automatically. These
objects are then pasted onto the base images accord-
ing to the masks. The entire process are illustrated as
Fig. 1 This process simultaneously generates image
and mask pairs without manual effort.
To address the challenges posed by varying
weather conditions, we implement two complemen-
tary strategies. Firstly, we compile a dataset of base
images captured under diverse weather conditions,
our experiment sites have the ability to simulate dif-
ferent weather environments,including rainy, foggy,
and clear (sunny). Secondly, we utilize optical-flow
model RAFT(Teed and Deng, 2020) to provide po-
sitional information as prior knowledge. To obtain
above predictions, we generate pseudo sequences of
obstacles. This involves creating an initial pseudo
frame at point P
i
(x, y) and subsequently generating a
new frame at P
i+1
(x + δ, y + δ) with the same object
superimposed.
To validate the effectiveness and robustness of
our proposed approach, we conduct experiments on
different possible obstacles under different scenar-
ios. The categories of obstacles include pedestrians,
rocks, cubes and parcels. Except pedestrians, all cat-
egories of obstacles are unseen in training stage. Ex-
perimental results indicate that our approach yields
satisfactory performance across different weather sce-
narios.
2 RELATED WORK
2.1 Railway Obstacles Detection
Matthias Brucker et al.(Brucker et al., 2023)propose
a shallow network to learn railway segmentation from
normal railway images. They explore the controlled
inclusion of global information by learning to halluci-
nate obstacle-free images. Zhang Qiang et al.(Zhang
et al., 2023). combine segmentation model with the
LiDAR in their obstacle detection system; Amine
Boussik et al.(Boussik et al., 2021) propose an unsu-
pervised models based on a large set of generated con-
volutional auto-encoder models to detect obstacles on
railway’s track level. To best of our knowledge, there
has been no work implementing optical-flow in rail-
way obstacles scenarios.
2.2 Segmentation with Optical Flow
Optical flow is used to detect continuous motion be-
tween sequential frames, serving as an important cue
for identifying objects in scenarios where the back-
ground remains stable and motionless. Laura et al.
(Sevilla-Lara et al., 2016). demonstrate the effective-
ness of jointly optimizing optical flow and video seg-
mentation using an iterative scheme; Volodymyr et
al(Fedynyak et al., 2024). present an architecture for
Video Object Segmentation that combines memory-
based matching with motion-guided propagation re-
sulting in stable long-term modeling and strong tem-
poral consistency.
3 METHOD
3.1 Data Acquisition
The pipeline of our approach is illustrated in Fig.2.
Given a set of base images B and target images T, our
objective is to identify potential obstacles within spe-
cific regions η. Unlike traditional detection methods
that categorically detect each obstacle, we reformu-
late the problem as a binary segmentation task. In-
stead of attempting to detect all potential obstacles,
which is impractical, our emphasis is on segmenting
the railway area, a region that remains consistent over
time compared to obstacles. To simulate these scenar-
ios effectively, we generate highly realistic pseudo-
images using a copy-paste approach. Additionally,
to address challenges posed by extreme weather con-
ditions, which can obscure object segmentation, we
introduce optical flow to provide prior information
guiding the segmentation model. Pseudo images I
t
and I
t+δ
are generated by applying a small shift δ to
the target object, simulating its movement. The out-
put of the optical flow model is incorporated along
with pseudo images as input to facilitate accurate pre-
dictions. This section will delve into the detailed
methodology employed throughout this process.
3.2 Experimental Site
All experiments were conducted at our experimental
site in Xinjin, Chengdu. The site measures approx-
imately 70 meters in length and 8 meters in width.
It includes rail lines, sleepers, and road debris to
simulate realistic railway conditions. The facility is
equipped with rain and fog simulation devices capa-
ble of replicating four different levels of rainfall and
fog intensity. As illustrated in the figure below, the
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
260
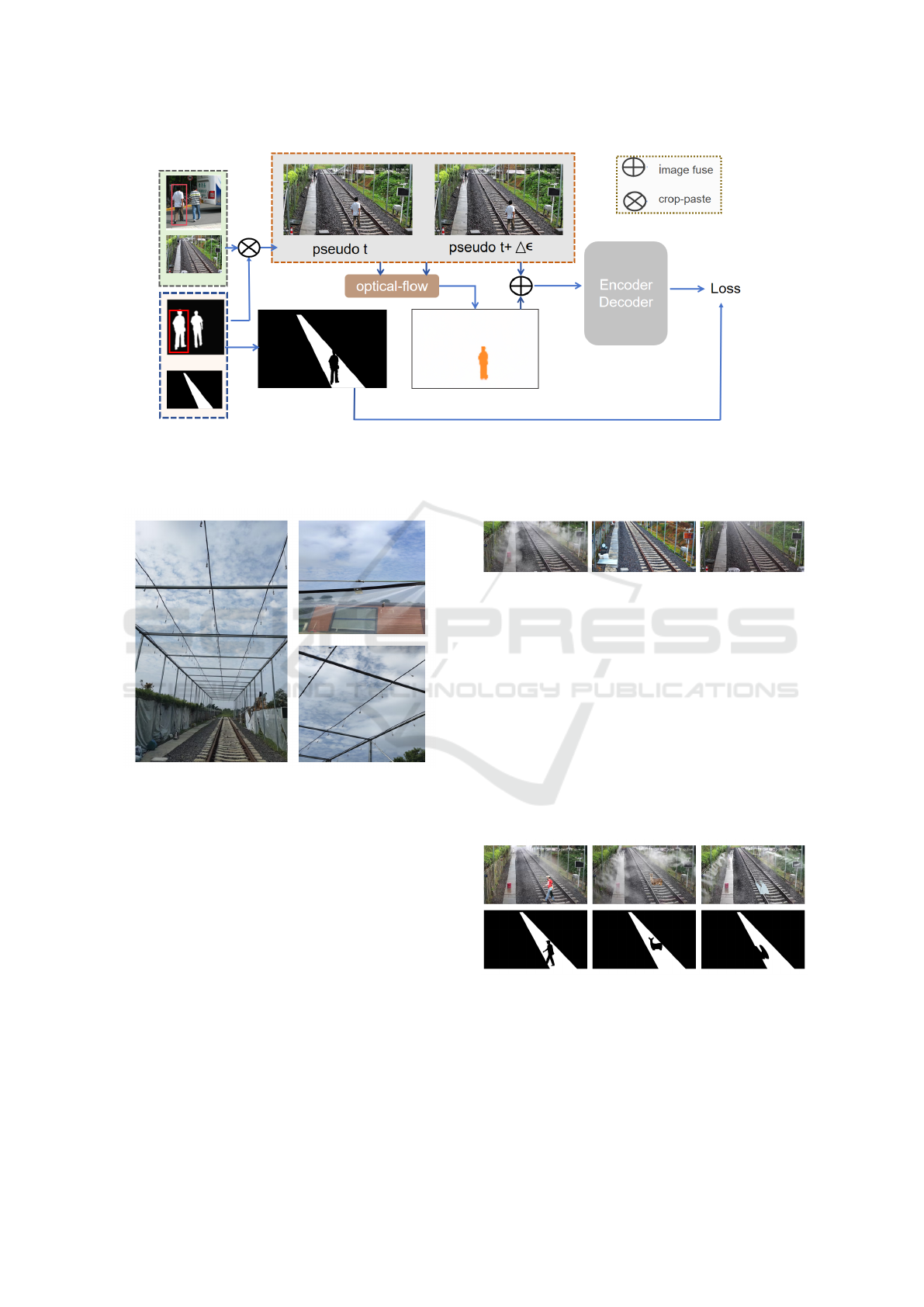
Figure 2: The pipeline of our proposed approach involves generating synthetic images and masks using background images,
object images, and their corresponding masks. An image at time step t + ∆ε is generated based on the image at time step
t with a slight displacement of the pasted object. The predictions from the optical flow model, along with the generated
pseudo-images, are then fed into an encoder-decoder framework for training.
Figure 3: Experimental site in Chengdu.
spray system covers the entire railway area. The sim-
ulation process is controlled by a dedicated control
system developed by CSRD.
Base Images are used in our experiments are gathered
at our facility in Chengdu, which features a railway
spanning over 60 meters and includes simulators for
fog and rain conditions. To ensure diversity in our
dataset, we capture images under different weather
scenarios, specifically rainy, foggy, and sunny condi-
tions Fig. 6. Due to the fixed position of the cam-
era, only one mask is required for annotation pur-
poses. Importantly, the railway areas in the base im-
ages are devoid of any potential obstacles. Any obsta-
cles present are generated using a copy-paste method.
Figure 4: Sample base images depicting various weather
conditions. From left to right, the images illustrate scenes
captured under foggy, normal, and rainy conditions.
Object Image dataset comprises three categories:
PennFudanPed, Obj365 (part) (Shao et al., 2019), and
DTD (Cimpoi et al., 2014). To facilitate fully auto-
mated application of our methodology, we proceed
under the assumption that no masks are initially avail-
able. We focus on selecting categories likely to oc-
cur in our scenario, such as animals (e.g., deer, horse,
cow) and vehicles (e.g., truck, cart). This ensures our
approach is tailored to handle relevant objects effec-
tively.
Figure 5: Sample of generated image-mask pairs. From left
to right: pedestrian, animal and texture.
The entire process can be delineated into sequen-
tial steps: Initially, object images are fed into the
YOLO model, which returns a list of bounding boxes
identifying detected targets. These bounding boxes
serve as inputs for SAM, which generates segmenta-
A Universal Railway Obstacle Detection System Based on Optical-Flow Guided Semi-Supervised Segmentation
261
tion masks to outline the object pixels. Subsequently,
these segmented object pixels are integrated into the
base images based on the segmentation mask guid-
ance. Here, we elaborate on the detailed methodol-
ogy.
• Object Detection with YOLO: Object images
are inputted into the YOLO model, specifically
trained on Obj365, to detect objects belonging to
predefined target categories fitting our scenario.
• Segmentation with SAM: Bounding boxes from
YOLO are used as prompts for SAM to generate
segmentation masks. These masks delineate ob-
ject pixels, facilitating their extraction from the
object images.
• Integration with Base Images: Extracted ob-
ject pixels are seamlessly integrated into the cor-
responding regions of base images, aligning with
the guidance provided by the segmentation masks.
During the SAM stage, while not every segmenta-
tion mask achieves perfection, each contributes to the
overall objective of accurately segmenting the railway
area rather than focusing on obstacles. To address
challenges related to out-of-distribution (OOD) sce-
narios, we introduce random polygon generation with
texture rendering from DTD. Additionally, object re-
sizing and rescaling are applied to enrich image con-
tent and bolster model robustness.
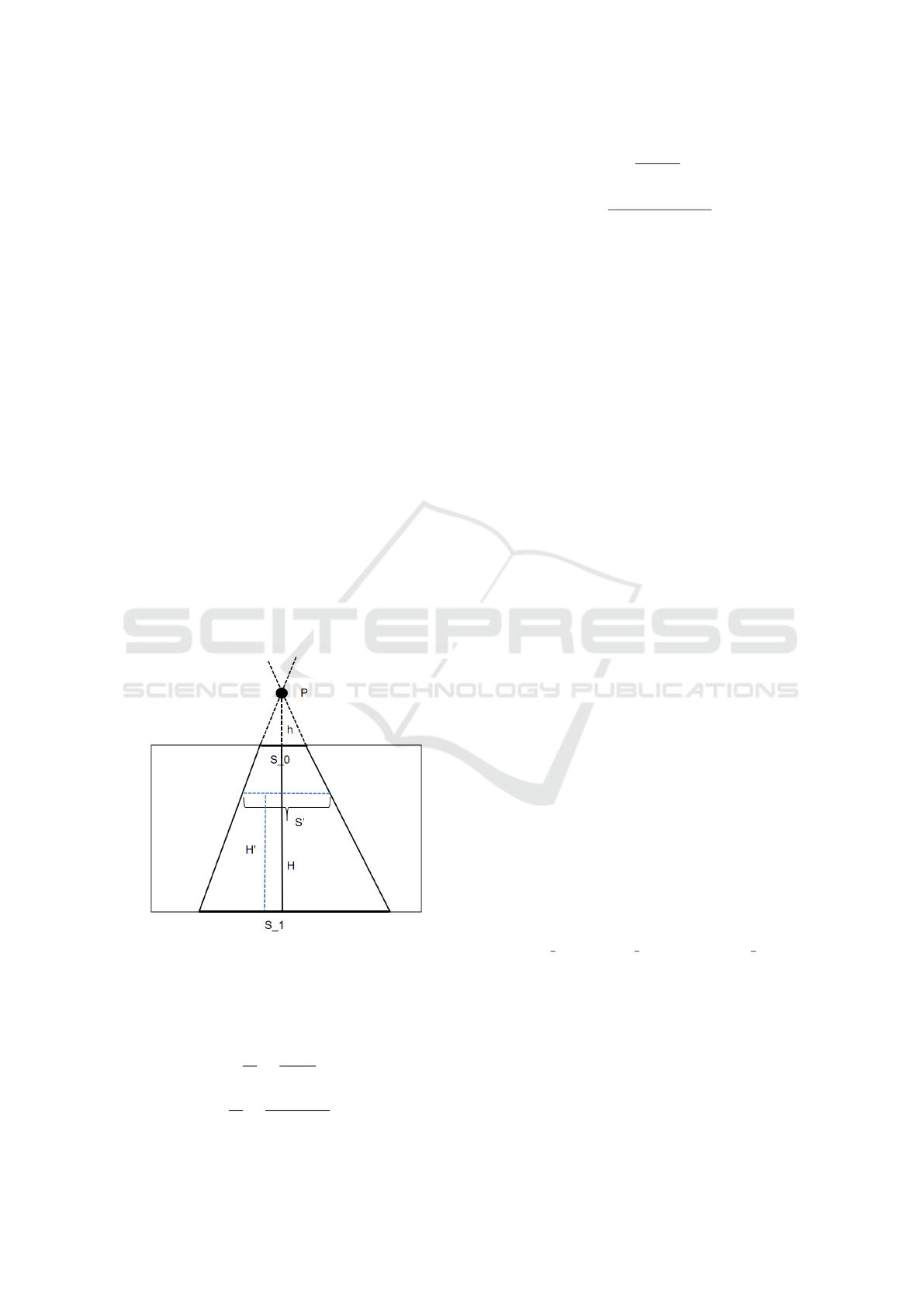
Figure 6: Re-scale illustration. We assume that two rails in-
tersect at point P. S
1
and S
0
are width of two rails in image.
H is the height of the image. h is the distance between P
and top line of two rails in image space.
The re-scale follow the equation below:
S
0
S
1
=
h
h + H
(1)
S
′
S
1
=
H − h
′
+ h
h + H
(2)
h =
s
0
· H
S
1
− S
0
(3)
S
′
=
S
1
· (h + H − H
′
)
h + H
(4)
We assume that two rails will interact at point P.
S
1
and S
0
are distances in 2D images. H is the height
of the image and h is the distance between P and
top of image. The estimated width of pasted objects
in height H
′
can be calculated as equations above.
demonstrated as Fig .5
3.3 Optical-Flow
Optical flow is based on the assumption that the in-
tensity of a point in an image remains constant as it
moves from one frame to the next.
I(x, y, t) = I(x + ∆t, y + ∆t, t + ∆t) (5)
In our scenario, we employ RAFT (Recurrent All-
Pairs Field Transforms) as our chosen model, which
demonstrates robust performance across a wide range
of scales from tiny to large. The size of obstacles
in our dataset varies, spanning from hundreds of pix-
els down to less than 50 pixels in size. Utilizing the
RAFT model requires two consecutive frames for op-
tical flow estimation. Accordingly, we generate two
pseudo images I
t
and I
t+1
, where the same target ob-
jects are pasted with a slight positional shift η.
Motion = φ(I
t
, I
t+1
) (6)
I
t+1
= I
t
(ob j
x
+ ∆x, ob j
y
+ ∆y) (7)
We set ∆x and ∆y range between 5-10. The mo-
tion prediction will be leveraged as prior information
fused with pseudo image to train the model.
4 EXPERIMENTS
4.1 Dataset and Evaluation Metrics
Dataset Our training dataset is consisted of three
parts: obs person, obs animals and obs textures,
namely person obstacles, animal obstacles and obsta-
cles generated from texture polygons. The details are
described as follow: As for the test dataset, we rec-
ollect images with various obstacles under different
weather conditions in different distance to the cam-
era.
Metrics mIoU is used to evaluate the performance of
our model. mIoU refers to the Mean Intersection over
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
262
union, which is a widely used metric in segmentation
task. It can be calculated as follow:
IoU
i
=
T P
i
T P
i
+ FP
i
+ FN
i
(8)
mIoU =
1
n
n
∑
i=0
IoU
i
(9)
pixel accuracy is also a metric to evaluate the segmen-
tation models.
Pixel accuracy =
N corr
N total
(10)
where N corr is the number of correctly classified
pixels, N total is the number of total pixels.
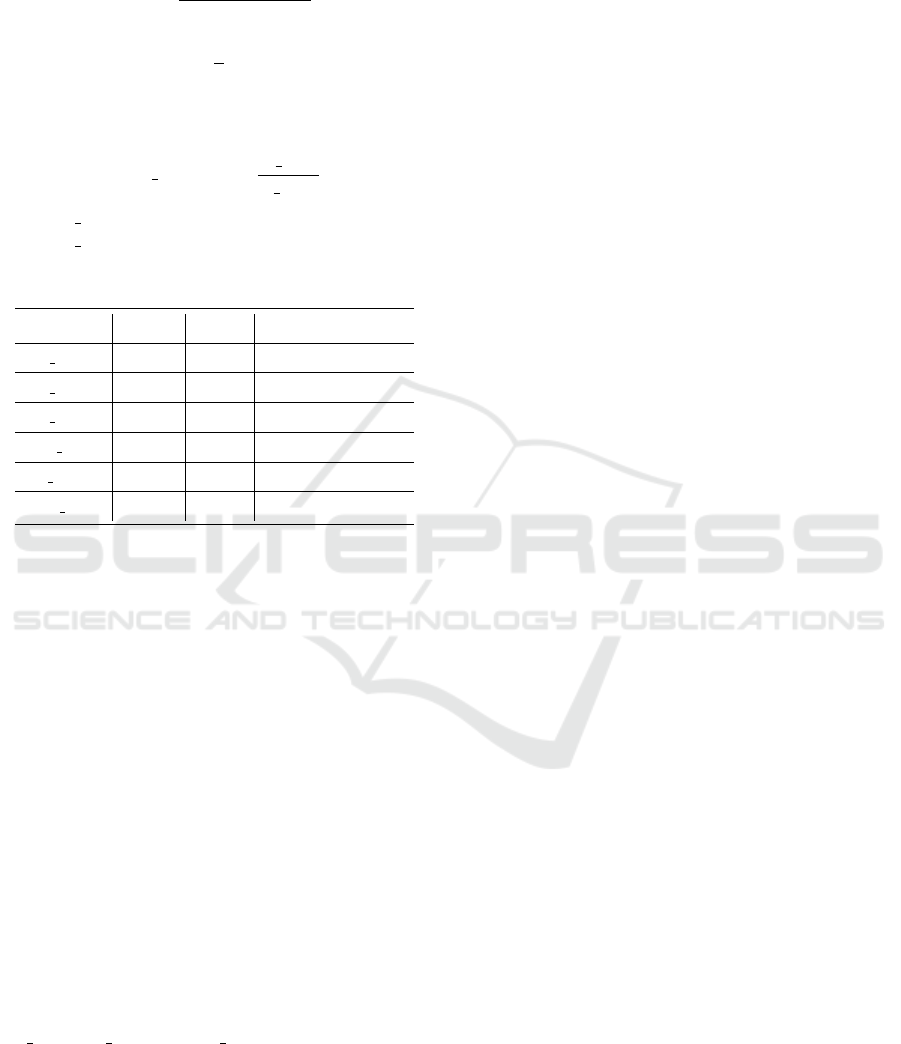
Table 1: Datasets description.
Name Volume Dis(m) Category
obs person 4000 0-70 pedestrian
obs animal 4000 0-70 cow,horse,deer
obs texture 2000 0-70 see DTD
val near 200 0-20 pedestrian,rock,cube
val middle 200 20-50 pedestrian,rock,cube
val f ar 200 50-70 pedestrian,rock,cube
4.2 Implementation Details
Our method is implemented using the PyTorch frame-
work and the model is trained on an RTX 3090Ti, with
24 GB memory. CPU processor is Intel i7-12700F
with 20 cores. We select Dice loss(Sudre et al., 2017)
as the loss function and Adam(Kingma and Ba, 2014)
as the optimizer. Starting learning rate is set to 0.001.
The batch size is set to 16 and the number of epochs
to 25. Albumentation(Buslaev et al., 2020) is utilized
to perform data augmentation. Data transformations
include horizontal flip, coarse dropout, and random
brightness contrast adjustments.
4.3 Results
Compare with Models
To validate the performance of our approach, we con-
duct experiments on our three self-collected datasets:
val near, val mid, and val far. The details are de-
scribed in Table 1. The basic training dataset contains
10,000 images (4,000+4,000+2,000). To fully assess
the impact of the number of generated images, we in-
crease the dataset size by 10% ,30% and 50% in rows
4 and 5.
The results are illustrated in Table3, which show
that both RAFT and segmentation-based approaches
can effectively segment obstacles in our railway area
experiments. Combining RAFT and pseudo-images
enhances model performance. As more generated im-
ages are added to the training dataset, the model’s per-
formance gradually reaches its limit.
Across Obstacles Categories
To validate the robustness of our proposed approach,
we conducted experiments across various categories.
The tested classes include cubes, branches, pedestri-
ans, and parcels. We also performed experiments un-
der different distance conditions. The results, pre-
sented in Table2, indicate that although the mean In-
tersection over Union (mIoU) decreases as distance
increases, the results remain reliable (over 0.72) at
a distance of 70 meters in our scenario. Addition-
ally, we observed that branches are particularly chal-
lenging targets compared to other objects due to their
complex shapes and textures. Another possible rea-
son for this difficulty is the lack of similar objects
in the training dataset. In contrast, the accuracy for
pedestrians is relatively high, likely because our syn-
thetic images include highly realistic pedestrians from
the FudanPenn dataset.
Ablation Study
We conduct ablation experiment to validate the effect
of different target objects. The results are demon-
strated as Table 4 Comparing the row 1,2,3 with row
4, we can find that each obs dataset contributes to im-
proving the robustness and accuracy of the model.
Qualitative Result
Figure 7 presents the segmentation results of our ap-
proach with and without optical-flow guidance. It is
evident that optical flow enhances the model’s perfor-
mance. The segmentation results are more cohesive
(columns 5 and 6) and exhibit greater sensitivity to
small objects (columns 1 and 2). For pedestrians in
a normal posture, both sets of results are satisfactory.
An interesting observation is that the use of optical
flow tends to produce false predictions outside of rail-
way areas (columns 2 and 5). However, this does not
affect the final outcomes of our analysis,since we only
foucs on the obstacles in railway areas.
A Universal Railway Obstacle Detection System Based on Optical-Flow Guided Semi-Supervised Segmentation
263
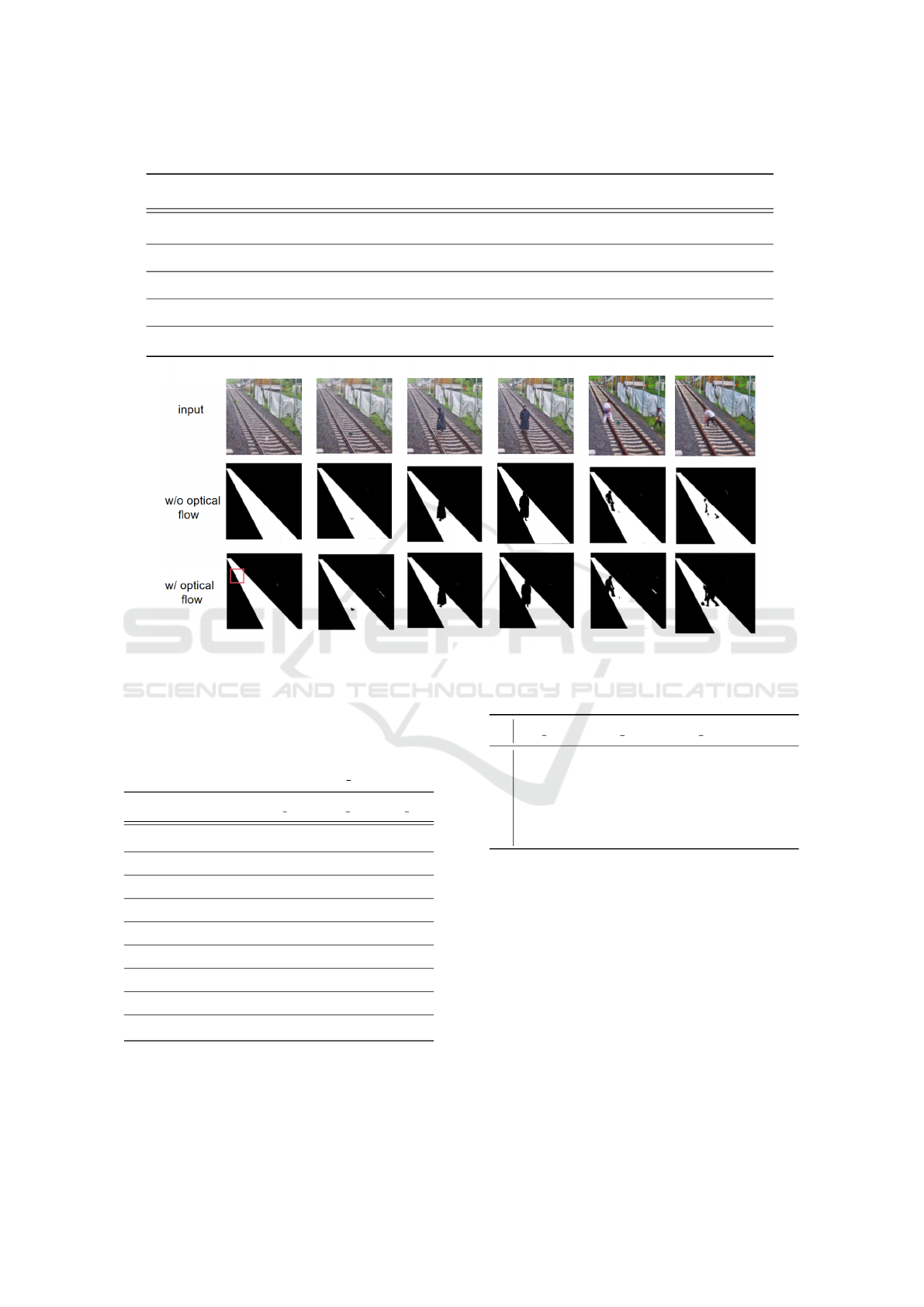
Table 2: Experimental results across various categories of obstacles at different distances. The metric is IoU.
rocks pedestrians parcel cube(20cm) cube(40cm) branches Average
5m-10m 0.952 0.964 0.927 0.931 0.937 0.871 0.930
10m-30m 0.931 0.942 0.913 0.904 0.911 0.784 0.898
30m-50m 0.873 0.907 0.871 0.887 0.873 0.685 0.849
50m-70m 0.732 0.784 0.751 0.771 0.737 0.583 0.726
Average 0.872 0.899 0.866 0.873 0.865 0.731 0.848
Figure 7: Qualitative results w/wo optical-flow module. The predicted masks with optical-flow provide more robust and
accurate especially in boundaries and tiny objects segmentation.
Table 3: The experimental results across different test sets
demonstrate that both the Optical flow(OF) and an increased
dataset contribute to improve model performance at varying
distances. Although the accuracy decreases as the distance
increases, the segmentation predictions remain effective in
detecting obstacles even in the test set val far.
val near val mid val far
Unet 0.804 0.793 0.767
PSPNet 0.817 0.809 0.735
PAN 0.813 0.826 0.749
DeepLabv3 0.825 0.817 0.747
OF 0.735 0.674 0.627
DeepLabv3+OF 0.843 0.828 0.749
DeepLabv3+OF+10% 0.837 0.843 0.734
DeepLabv3+OF+30% 0.851 0.842 0.751
DeepLabv3+OF+50% 0.863 0.851 0.782
5 CONCLUSION
This paper introduces a universal segmentation model
based on a semi-supervised approach. To address
Table 4: Ablation study.
obs person obs animal obs texture mIoU
1 ✓ ✓ ✗ 0.781
2 ✓ ✗ ✓ 0.817
3 ✗ ✓ ✓ 0.732
4 ✓ ✓ ✓ 0.849
out-of-distribution (OOD) challenges, we generate
highly realistic pseudo images instead of relying on
manual pixel-level annotations. Additionally, we
enhance performance by incorporating optical flow
techniques. Experimental results demonstrate satis-
factory performance across various potential objects.
REFERENCES
Bischke, B., Helber, P., Folz, J., Borth, D., and Dengel, A.
(2019). Multi-task learning for segmentation of build-
ing footprints with deep neural networks. In 2019
IEEE International Conference on Image Processing
(ICIP), pages 1480–1484. IEEE.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
264

Boussik, A., Ben-Messaoud, W., Niar, S., and Taleb-
Ahmed, A. (2021). Railway obstacle detection using
unsupervised learning: An exploratory study. In 2021
IEEE Intelligent Vehicles Symposium (IV), pages 660–
667. IEEE.
Brucker, M., Cramariuc, A., Von Einem, C., Siegwart,
R., and Cadena, C. (2023). Local and global infor-
mation in obstacle detection on railway tracks. In
2023 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 9049–9056.
IEEE.
Buslaev, A., Iglovikov, V. I., Khvedchenya, E., Parinov, A.,
Druzhinin, M., and Kalinin, A. A. (2020). Albumen-
tations: fast and flexible image augmentations. Infor-
mation, 11(2):125.
Cai, H., Lin, J., Lin, Y., Liu, Z., Tang, H., Wang, H., Zhu, L.,
and Han, S. (2022). Enable deep learning on mobile
devices: Methods, systems, and applications. ACM
Transactions on Design Automation of Electronic Sys-
tems (TODAES), 27(3):1–50.
Cimpoi, M., Maji, S., Kokkinos, I., Mohamed, S., and
Vedaldi, A. (2014). Describing textures in the wild.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 3606–3613.
Fedynyak, V., Romanus, Y., Hlovatskyi, B., Sydor, B.,
Dobosevych, O., Babin, I., and Riazantsev, R.
(2024). Devos: Flow-guided deformable transformer
for video object segmentation. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision, pages 240–249.
Guo, Q., Chen, Y., and Liao, S. (2023). Enhancing mobile
privacy and security: A face skin patch-based anti-
spoofing approach. In 2023 IEEE International Con-
ference on Cloud Computing Technology and Science
(CloudCom), pages 52–57. IEEE.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., et al. (2023). Segment anything. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 4015–4026.
Lis, K., Honari, S., Fua, P., and Salzmann, M. (2023). Per-
spective aware road obstacle detection. IEEE Robotics
and Automation Letters, 8(4):2150–2157.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Sazara, C., Cetin, M., and Iftekharuddin, K. M. (2019). De-
tecting floodwater on roadways from image data with
handcrafted features and deep transfer learning. In
2019 IEEE intelligent transportation systems confer-
ence (ITSC), pages 804–809. IEEE.
Sevilla-Lara, L., Sun, D., Jampani, V., and Black, M. J.
(2016). Optical flow with semantic segmentation and
localized layers. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3889–3898.
Shao, S., Li, Z., Zhang, T., Peng, C., Yu, G., Zhang, X.,
Li, J., and Sun, J. (2019). Objects365: A large-
scale, high-quality dataset for object detection. In Pro-
ceedings of the IEEE/CVF international conference
on computer vision, pages 8430–8439.
Sudre, C. H., Li, W., Vercauteren, T., Ourselin, S., and
Jorge Cardoso, M. (2017). Generalised dice over-
lap as a deep learning loss function for highly unbal-
anced segmentations. In Deep Learning in Medical
Image Analysis and Multimodal Learning for Clini-
cal Decision Support: Third International Workshop,
DLMIA 2017, and 7th International Workshop, ML-
CDS 2017, Held in Conjunction with MICCAI 2017,
Qu
´
ebec City, QC, Canada, September 14, Proceed-
ings 3, pages 240–248. Springer.
Teed, Z. and Deng, J. (2020). Raft: Recurrent all-pairs
field transforms for optical flow. In Computer Vision–
ECCV 2020: 16th European Conference, Glasgow,
UK, August 23–28, 2020, Proceedings, Part II 16,
pages 402–419. Springer.
Zhang, Q., Yan, F., Song, W., Wang, R., and Li, G. (2023).
Automatic obstacle detection method for the train
based on deep learning. Sustainability, 15(2):1184.
A Universal Railway Obstacle Detection System Based on Optical-Flow Guided Semi-Supervised Segmentation
265
