
Impact of Extended Clauses on Local Search Solvers for Max-SAT
Federico Heras
Universitat Pompeu Fabra, Barcelona, Spain
Keywords:
Max-SAT, Stochastic Local Search, Optimization, Constraint Satisfaction.
Abstract:
Previous research has demonstrated that several techniques based on the resolution rule for Max-SAT are
effective in improving results and boost the search, either as a preprocessing step or when embedded into
specific Max-SAT solving algorithms, such as branch-and-bound and Stochastic Local Search (abbreviated
SLS) algorithms. These techniques typically lead to a simplified and reduced Max-SAT formula, thereby
enabling the algorithms to find solutions more efficiently. In this paper, we take a different approach by
introducing a preprocessing step that, in contrast to prior methods, increases the size of the Max-SAT formula
based on the Extension Rule. Our objective is to examine how this expansion of the problem instance impacts
the performance of SLS algorithms. The empirical results indicate that for a subset of SLS algorithms, this
approach yields improved solutions. This finding is significant as it challenges the conventional wisdom that
smaller, simplified formulas are always better for all kind of solvers.
1 INTRODUCTION
(Weighted) Max-SAT is a well-known NP-Hard prob-
lem. The objective of the Max-SAT problem is to
identify an assignment of variables that satisfies the
maximum number (or weights) of the provided set of
clauses. It is recognized as one of the fundamental
problems in combinatorial optimization, with many
significant problems naturally formulable as Max-
SAT instances. Among others, they include problems
like Maximum One, Maximum Cut (Max-CUT), Max-
imum Clique (Max-Clique) with many practical ap-
plications in bioinformatics, physics and electronic
markets (Bansal and Bafna, 2008; Guerri and Mi-
lano, 2003; Pardalos and Rebennack, 2010; Strick-
land et al., 2005) and other industrial problems.
A sound and complete inference method for Max-
SAT was introduced (Larrosa et al., 2008) called
the resolution rule for Max-SAT. The implementation
of restricted rules based on the resolution for Max-
SAT has been proven advantageous across various al-
gorithmic approaches, whether utilized as a prepro-
cessing step or integrated directly into the algorithm.
These include branch-and-bound algorithms (Heras
et al., 2008; Larrosa et al., 2008; Li et al., 2007a;
Heras and Larrosa, 2008; Heras and Ba
˜
neres, 2013;
Cherif et al., 2020), stochastic local search (SLS) al-
gorithms (Heras and Ba
˜
neres, 2010; Abram
´
e and Ha-
bet, 2012), and algorithms that rely on iteratively call-
ing to a SAT oracle (Heras and Marques-Silva, 2011;
Py et al., 2022). In those works, the application of 1
step or several steps of the resolution rule resulted in
a simplified and smaller Max-SAT formula.
Stochastic Local Search (SLS) algorithms employ
heuristic approaches that begin by selecting a point
within the search space and then iteratively transition
from the current solution to a neighboring candidate
solution. Certain methods (Anbulagan et al., 2005;
Heras and Ba
˜
neres, 2010; Abram
´
e and Habet, 2012)
demonstrate that employing incomplete inference can
enhance the performance of SLS algorithms, partic-
ularly those structured on the WalkSat architecture
(Selman et al., 1994).
In this paper, we take a different approach by ap-
plying a transformation that, contrary to prior meth-
ods, increases the size of the Max-SAT formula. Es-
sentially, we will apply the Extension Rule (ER) (Lar-
rosa and Schiex, 2003; Atserias and Lauria, 2019;
Rollon and Larrosa, 2022) which basically takes one
clause of the original formula and creates two ex-
tended clauses from it, which means replacing the
original clause by two copies of such clause but with
an additional literal. This rule is also referred to as
split rule. Then, we propose a novel preprocessor
based on applying the Extension Rule for all clauses
in the formula.
We assess the effect of such preprocessor with
several experiments including different benchmarks
78
Heras, F.
Impact of Extended Clauses on Local Search Solvers for Max-SAT.
DOI: 10.5220/0013078200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 78-85
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

and SLS algorithms. The empirical investigation
demonstrates that for a subset of SLS algorithms and
benchmarks, this approach produces better results.
The structure of this paper is as follows. We begin
by introducing some preliminary concepts. Next, we
present the Extension Rule and its connection to the
Neighborhood Rule. We then introduce a new prepro-
cessor based on this rule. Following this, we conduct
empirical experiments to evaluate the preprocessor’s
effectiveness. We then discuss how our work relates
to previous research. Finally, we conclude with sum-
marizing our findings and future research directions.
2 PRELIMINARY CONCEPTS
In this section, we formally introduce the Max-SAT
problem and related notation.
The Max-SAT Problem. X = {x
1
, x
2
, . . . , x
n
} is a set
of Boolean variables. A literal is either a variable x
i
or
its negation ¯x
i
. The variable to which a literal l refers
is denoted by var(l). Given a literal l, its negation
¯
l is
¯x
i
if l is x
i
and it is x
i
if l is ¯x
i
.
A clause C is a disjunction of literals. Capital let-
ters will represent clauses. The size of a clause, noted
|C|, is the number of literals that it has. Clauses of
size one and two are called unit and binary clauses,
respectively. A formula in conjunctive normal form
(CNF) is a set of clauses.
An assignment is a set of literals A =
{l
1
, l
2
, . . . , l
k
} such that for all l
i
∈ A, its vari-
able var(l
i
) = x
i
is assigned to value t (true) or f
( f alse). If variable x
i
is assigned to t ( f ), literal
x
i
( ¯x
i
) is satisfied and literal ¯x
i
(x
i
) is falsified. If
all variables in X are assigned, the assignment is
called complete, otherwise it is called partial. An
assignment satisfies a literal iff the literal belongs
to the assignment, the assignment satisfies a clause
iff one or more of its literals are satisfied and the
assignment falsifies a clause iff the clause contains
the negation of all its literals. The empty clause □
cannot be satisfied by definition.
A weighted clause is a pair (C, w), where C is a
clause and the weight w is the cost of its falsifica-
tion. A weighted formula in conjunctive normal form
(WCNF) F is a set of weighted clauses. Many real
problems contain clauses that must be satisfied. We
denote these clauses hard and a special weight ⊤ is
associated to them. Note that, any weight w ≥ ⊤ in-
dicates that the associated clause must be necessarily
satisfied. Thus, we can replace w by ⊤ without chang-
ing the problem. Consequently, we can assume all
weights are in the interval [0, ⊤]. Non-hard clauses
are called soft clauses. We use the symbol ≡ (e.g.,
F ≡ F
′
) to denote that two formulas are equivalent.
A model is a complete assignment that satisfies all
hard clauses. The cost of an assignment is the sum of
the weights of the falsified clauses. Given a WCNF
formula, the objective of the Weighted Max-SAT is to
find a model with minimum cost.
Example 1. Let be F a weighted for-
mula with 3 clauses F = {( ¯x
1
, 1), ( ¯x
2
, 1),
(x
1
∨ x
2
, ⊤)}. Clauses ( ¯x
1
, 1) and ( ¯x
2
, 1) are
unit soft clauses with weight 1. Clause (x
1
∨ x
2
, ⊤) is
a binary hard clause. The assignment A
1
= { ¯x
1
, ¯x
2
}
falsifies the hard clause (x
1
∨ x
2
, ⊤) and for this
reason A
1
is not a model. Assignment A
2
= {x
1
, x
2
}
satisfies the hard clause and falsifies both soft unit
clauses. Hence, assignment A
2
is a model with cost
2. Finally, the assignment A
3
= {x
1
, ¯x
2
} satisfies the
hard clause and only falsifies one soft clause. A
3
is
an optimal model with cost 1.
Let u and w be two weights. Their sum is defined
as u ⊕ w = min{u + w, ⊤} in order to keep the re-
sult within the interval [0, ⊤]. Assuming u ≥ w, their
subtraction is defined as u ⊖ w = u − w if u ̸= ⊤ and
u⊖w = ⊤ otherwise. The De Morgan rule is unsound
for Max-SAT. Instead, the following rule should be
repeatedly used until the conjunctive normal form is
achieved: (A ∨l ∨C, w) ≡ {(A ∨
¯
C, w), (A ∨
¯
l ∨C, w)}.
The empty clause may appear in a formula. If
its weight is ⊤, i.e. (□, ⊤), the formula does not
have any model. Following (Larrosa et al., 2008),
the resolution rule for Max-SAT is {(x ∨ A, u), ( ¯x ∨
B, w)} ≡ {(A ∨ B, m), (x ∨ A, u ⊖ m), ( ¯x ∨ B, w ⊖ m),
(x ∨ A ∨
¯
B, m), ( ¯x ∨
¯
A ∨ B, m)}, where m = min{u, w}.
(x ∨ A, u) and ( ¯x ∨ B, w) are called clashing clauses;
(A ∨ B, m) is called the resolvent; and (x ∨ A, u ⊖ m)
and ( ¯x ∨ B, w ⊖ m) are called as posterior clashing
clauses. Finally, (x ∨ A ∨
¯
B, m) and ( ¯x ∨
¯
A ∨ B, m) are
called compensation clauses.
Note that in Max-SAT truth tables are tables with
a cost associated to each truth assignments. A brute-
force solving method consists in computing the truth
table of the input for mula and finding the minimal
cost model. For instance the cost for formula F =
{(x
1
∨ x
2
, 1), (x
2
, 2), ( ¯x
1
∨ ¯x
2
, ⊤)} is as in Table 1:
Table 1: Truth table example.
x
1
x
2
F
f f 3
f t 0
t f 2
t t ⊤
First and second columns are the variables and the
respective values they can take, as usual in truth ta-
Impact of Extended Clauses on Local Search Solvers for Max-SAT
79

bles. The third column shows the sum of weights of
unsatisfied clauses in F = {(x
1
∨ x
2
, 1), (x
2
, 2), ( ¯x
1
∨
¯x
2
, ⊤)} for each possible assignment. Hence, assign-
ment A
1
= {x
1
, ¯x
2
} is the only optimal model with
cost 0.
The Max-Cut Problem. In what follows, we ex-
plain how to encode the Max-Cut problem as Max-
SAT as we will use some Max-Cut instances in the
experimental section. The Max-Cut problem consists
in finding a cut of maximum size. It can be easily
modeled as Max-SAT. One variable x
i
is associated
to each graph vertex v
i
. The value true ( f alse) in-
dicates that vertex v
i
belongs to U (to V − U). For
each edge (v
i
, v
j
), there are two clauses (x
i
∨x
j
, 1) and
( ¯x
i
∨ ¯x
j
, 1). Given a complete assignment, the number
of violated clauses is |E|−S where S is the size of the
cut associated to the assignment.
3 EXTENDED CLAUSES
In this section, we introduce well-known Neighbor-
hood and Extension rules, which are indeed deeply
related one with the other. Then we propose a novel
preprocessor based on the Extension Rule.
3.1 Neighborhood Resolution
The Neigborhood resolution (NRES) (Larrosa et al.,
2008) takes two clauses containing the same literals
C, with an additional literal h that appears in the pos-
itive h and in the negative
¯
h form on each clause and
results in the following:
{(C ∨ h, w
1
), (C ∨
¯
h, w
2
) ≡
{(C, m), (C ∨ h, w
1
⊖ m), (C ∨
¯
h, w
2
⊖ m)}
where m = min(w
1
, w
2
). Note that if weights w
1
=
w
2
= m we would obtain simply:
{(C ∨ h, m), (C ∨
¯
h, m) ≡ {(C, m)}
The simplification capability of neighborhood res-
olution (NRES) is shown in the following example,
where several steps of resolution are applied based on
NRES, sometimes referred to as hyper-resolution.
Example 2. Let F be a WCNF formula with clauses
F = {(x
1
∨ x
2
∨ x
3
, 1), (x
1
∨ x
2
∨ ¯x
3
, 1), (x
1
∨ ¯x
2
∨
x
3
, 1), (x
1
∨ ¯x
2
∨ ¯x
3
, 1), ( ¯x
1
, 1)}. The application of
the Neighborhood Resolution rule to the first and
second clause, and to the third and fouth clause in
F produces the following equivalent formula F
′
=
{(x
1
∨ x
2
, 1), (x
1
∨ ¯x
2
, 1), ( ¯x
1
, 1)} (i.e. F ≡ F
′
). Now,
we can apply again the NRES rule between the first
two clauses, resulting in the following equivalent for-
mula F
′′
= {(x
1
, 1), ( ¯x
1
, 1)} (i.e. F ≡ F
′
≡ F
′′
).
Hence, we obtained a single unit clause from 4
ternary clauses after applying the NRES rule three
times, which simplified substantially the original for-
mula F . But we can go one step further. We can see
(x
1
, 1), ( ¯x
1
, 1) as equivalent to (□ ∨ x
1
, 1), (□ ∨ ¯x
1
, 1).
Hence, by NRES rule we would obtain (□, 1) making
explicit a cost of 1 for the original formula. Some
authors refers to this last transformation as Com-
plementary Unit clause rule (Niedermeier and Ross-
manith, 2000).
The term Neighborhood Resolution was coined by
(Cha and Iwama, 1996) in the SAT context.
3.2 Extension Rule
Traditionally research work has focused on rules to
converting the input formula into a simpler form by
shortening clauses, reducing the number of clauses,
and generating as many unit or empty clauses as pos-
sible. In this subsection, we introduce a rule called
Extension rule (ER) (Larrosa and Schiex, 2003; Rol-
lon and Larrosa, 2022; Atserias and Lauria, 2019) and
relate it with the Neigborhood resolution rule. Essen-
tially, it takes a single clause (C, w) where C is a set of
literals, and then it creates two new clauses with one
additional and arbitrary literal h and
¯
h respectively.
{(C, w) ≡ {(C ∨ h, w), (C ∨
¯
h, w)}
See an example below to illustrate this concept.
Example 3. Let F be a WCNF formula with clauses
F = {(x
1
∨ x
2
, 1)}. The application of the extension
rule to clauses in F produces the following equivalent
formula F
′
= {(x
1
∨ x
2
∨ h, 1), (x
1
∨ x
2
∨
¯
h, 1)}) with
arbitrary literal h.
The equivalence of the Extension Rule becomes
obvious when examining the cost distributions in a
truth table. Consider the example below:
Example 4. Assume the following formula F and the
result of applying the Extension Rule in F
′
on vari-
able x
2
. F = {(x
1
, 3)} and F
′
= {(x
1
∨ x
2
, 3), (x
1
∨
¯x
2
, 3)}. We can see that the distribution of costs of the
truth table in Table 2 is the same. Note that it also
shows the equivalence for the case of applying NRES
to formula F
′
which would result back into F .
In the context of the Weighted Constraint Satis-
faction Problem, the extension operation (Larrosa and
Schiex, 2003) is applied to transform the problem and
is deeply related to the Extension Rule (ER). For fur-
ther details, refer to the related work section. Next,
we present a formal proof of the Extension Rule’s cor-
rectness.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
80

Table 2: Truth table for F = {(x
1
, 3)} and F
′
= {(x
1
∨
x
2
, 3), (x
1
∨ ¯x
2
, 3)}.
x
1
x
2
{(x
1
, 3)} {(x
1
∨ x
2
, 3), (x
1
∨ ¯x
2
, 3)}
f f 3 3
f t 3 3
t f 0 0
t t 0 0
Proof. Similar to (Rollon and Larrosa, 2022), let
be the resulting clauses from Extension rule (C ∨
h, w), (C ∨
¯
h, w), no matter which value is assigned
variable h the resulting clause would be (C, w). If h
is assigned t then clause (C ∨ h, w) is satisfied, and
literal
¯
h in (C ∨
¯
h, w) is unsatisfied and as such, can
be removed which results in (C, w). Similarly, If h
is assigned f then clause (C ∨
¯
h, w) is satisfied, and
literal h in (C ∨ h, w) is unsatisfied and as such, can
be removed which results in (C, w). Alternatively, as-
sume any literal in C is satisfied, then both (C ∨ h, w)
and (C ∨
¯
h, w) are satisfied by the current assignment.
Contrary, assume all literals in C are falsified by the
current assignment, then we are left with (h, w) and
(
¯
h, w). No matter which value is assigned to h as we
will have to pay cost w in either case.
Since Neighborhood Resolution is based on the
Resolution Rule for Max-SAT which has been proved
to be sound and complete (Larrosa et al., 2008), we
can do a simpler proof based on Neighborhood Reso-
lution:
Proof. By applying Neighborhood Resolution
(NRES) to the extended clauses (C ∨ h, w), (C ∨
¯
h, w),
we would obtain (C, w). Hence, we obtain the
original formula.
The Neighborhood rule can be considered the in-
verse transformation of the extension rule, and vice
versa.
3.3 Extension Preprocessor
Given the original Max-SAT formula see the pseudo-
code for the Extension Preprocessor in Algorithm 1.
As it can be observed, it essentially applies the
Extension Rule to all clauses of the original formula.
The additional literal added to each pair of extended
clauses can be selected in many ways. Refer to the
empirical section for the selected approach.
4 RESULTS
For our experiments, we employed the original (OR)
Max-SAT problem alongside the transformed in-
Algorithm 1: Extension Preprocessor.
Input: A Max-SAT formula F
Output: A Max-SAT formula F
′
which is
equivalent to F
Function ExtensionPreprocessor(F ):
F
′
←
/
0 ; // Initialize new formula
foreach clause (C, w) in F do
F
′
← F
′
∪ {(C ∨ l, w), (C ∨ ¬l, w)} ;
// Being l an arbitrary literal
end
return F
′
stance using the Extension Preprocessor (Ext). The
preprocessor was implemented using .NET Core 7.0,
and its execution time is negligible for the bench-
marks considered. Hence, for clarity of presentation,
we have not included them.
We investigated the impact of the preprocessor on
relevant Stochastic Local Search (SLS) algorithms in
the literature. The following algorithms have been
evaluated which are publicly available in UBCSAT
solver (Tompkins and Hoos, 2004): SAMD (Hansen
and Jaumard, 1990), GSAT (Selman et al., 1992),
Walksat (Selman et al., 1994), Novelty (McAllester
et al., 1997), Tabu Walksat (McAllester et al., 1997),
Novelty+ (Hoos, 1999), Adaptnovelty+ (Hoos, 2002),
IROTS (Smyth et al., 2003), VW2 (Prestwich, 2005),
and adaptg2wsat+p (Li et al., 2007b). Note that
all those algorithms in UBCSAT solver can han-
dle both unweighted and weighted Max-SAT, except
adaptg2wsat+p and VW2.
The benchmarks were selected from recent Max-
SAT Evaluations
1
and comprise the following:
• M2S. Random Max-2-SAT instances with 120
variables and 1200 to 2600 binary clauses.
• MC7 and MC8. Crafted Max-CUT instances on
bipartite graphs with 140 nodes and 630 edges,
represented as Max-2-SAT instances.
• MCAH. Crafted Max-CUT instances with 140
variables and 1200 to 2600 binary clauses.
• M3SAH. Random Max-3-SAT instances with 110
variables and 700 to 1100 ternary clauses.
• M3SH. Random Max-3-SAT instances instances
with 250/300 variables and 1000/1200 ternary
clauses.
• WM2S. Random Weighted Max-2-SAT with 140
variables and 1200 to 1600 binary clauses.
• WM3SH. Random Weighted Max-3-SAT in-
stances instances with 70 variables and 700 to
1000 ternary clauses.
All experiments were conducted on a PC running
Windows 11 Home, equipped with an AMD Ryzen 5
1
https://maxsat-evaluations.github.io/
Impact of Extended Clauses on Local Search Solvers for Max-SAT
81
4500U processor at 2.38 GHz and 8 GB of RAM. The
experiments involved running each Stochastic Local
Search algorithm for each instance 10 times, 10000
iterations for each run, and recording the average of
the returned solutions and average execution time.
We conducted preliminary experiments to select
the arbitrary h literal for each pair of extended clauses
(C ∨ h, w), (C ∨
¯
h, w). We tested three simple meth-
ods: always assigning the literal that appears in the
most clauses, the literal that appears in the fewest
clauses, and a random literal. We realized that assign-
ing the same literal significantly impacted execution
performance, as it often required traversing all clauses
within each SLS solver iteration. Therefore, for the
remaining experiments in this section, we assigned a
random literal for each pair of extended clauses.
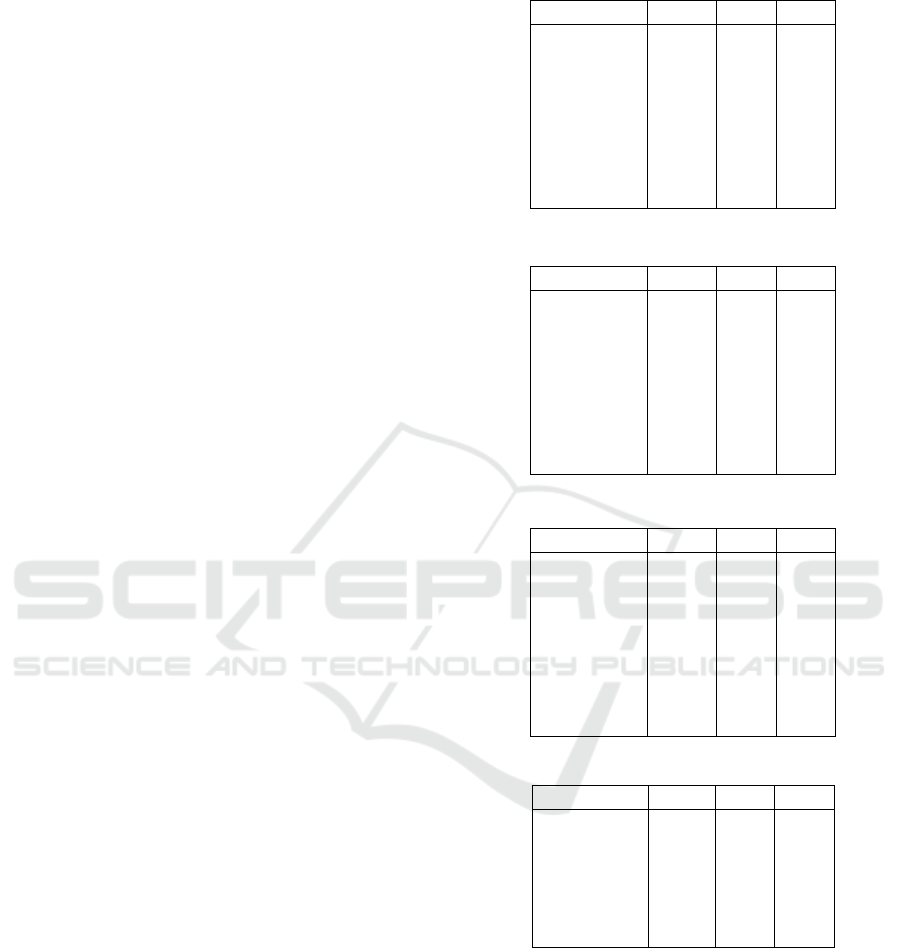
Find a summary of the comparison in tables 3
to 12. The values in column Diff, show the vari-
ance between the best solution obtained for the origi-
nal problem and the one achieved for the preprocessed
problem. Hence, negative values indicate a deteriora-
tion in the solution resulting from the transformation.
Column OR shows the average execution time for the
original formula, and Ext the average time for the pre-
processed formula.
The different local search algorithms exhibit dis-
tinct behavior to the transformed instances produced
by the preprocessor. Specifically, Novelty, Novelty+,
AdaptNovelty+, and Tabu WalkSat exhibit notable
improvements with the Extension Preprocessor Ext.
These enhancements are observed in both unweighted
and weighted Max-SAT instances. However, more
substantial improvements are reported for Max-2-
SAT instances compared to Max-3-SAT instances.
Conversely, the Ext preprocessor degrades no-
tably the performance of Walksat, GSAT and SAMD.
For IROTS, VW2, and adaptg2wsat+p, there is some
degradation, but it is less significant. Notably, VW2
shows slight improvements in two benchmarks, while
IROTS is the least sensitive algorithm.
Regarding execution time, for Ext preprocessed
instances, it generally takes 1.5 to 2 times longer com-
pared to the OR original instances for most Local
Search algorithms. This is expected since the num-
ber of clauses is doubled. The only exceptions are
IROTS and SAMD, which are even faster with the
transformed instances.
5 PREVIOUS WORK
In the context of SAT several works were proposed to
add additional clauses to help SLS to find solutions
(Cha and Iwama, 1996; Lorenz and W
¨
orz, 2020).
Table 3: Solutions for Novelty.
Benchmark Diff OR Ext
M2S 20.87 0.60 1.23
MC7 17.27 0.39 0.79
MC8 17.41 0.39 0.79
MCAH 23.21 0.54 1.13
M3SAH 1.21 0.41 0.68
M3SH 1.50 0.24 0.43
WM2S 90.66 0.68 1.07
WM3SH 5.09 0.64 1.02
Table 4: Solutions for Novelty+.
Benchmark Diff OR Ext
M2S 21.04 0.60 1.23
MC7 16.71 0.39 0.79
MC8 17.28 0.39 0.79
MCAH 23.02 0.54 1.13
M3SAH 1.42 0.41 0.70
M3SH 1.30 0.24 0.44
WM2S 90.46 0.68 1.07
WM3SH 4.66 0.64 1.01
Table 5: Solutions for AdaptNovelty+.
Benchmark Diff OR Ext
M2S 8.78 0.60 1.22
MC7 6.64 0.39 0.79
MC8 6.71 0.39 0.79
MCAH 11.29 0.55 1.14
M3SAH 0.23 0.40 0.68
M3SH -0.02 0.23 0.41
WM2S 30.44 0.65 1.04
WM3SH 0.63 0.62 0.99
Table 6: Solutions for adaptg2wsat+p.
Benchmark Diff OR Ext
M2S -4.03 0.85 2.11
MC7 -2.75 0.42 1.07
MC8 -2.75 0.42 1.07
MCAH -6.55 0.53 1.47
M3SAH -0.58 0.59 1.24
M3SH -0.34 0.36 0.69
Several inference rules based on Max-SAT reso-
lution (i.e. the Neighborhood Resolution rule) were
introduced in (Li et al., 2007a; Larrosa et al., 2008)
and subsquent works which are specially designed to
simplify the formula and usually target binary and
unit clauses. Most of them are based on obtaining
unit clauses from binary ones and then use those to
create new empty clauses making a lower bound ex-
plicit in the formula. Such rules have been shown
to be efficient in different types of algorithms, both
as a preprocessor or embedded in the algorithm, in-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
82
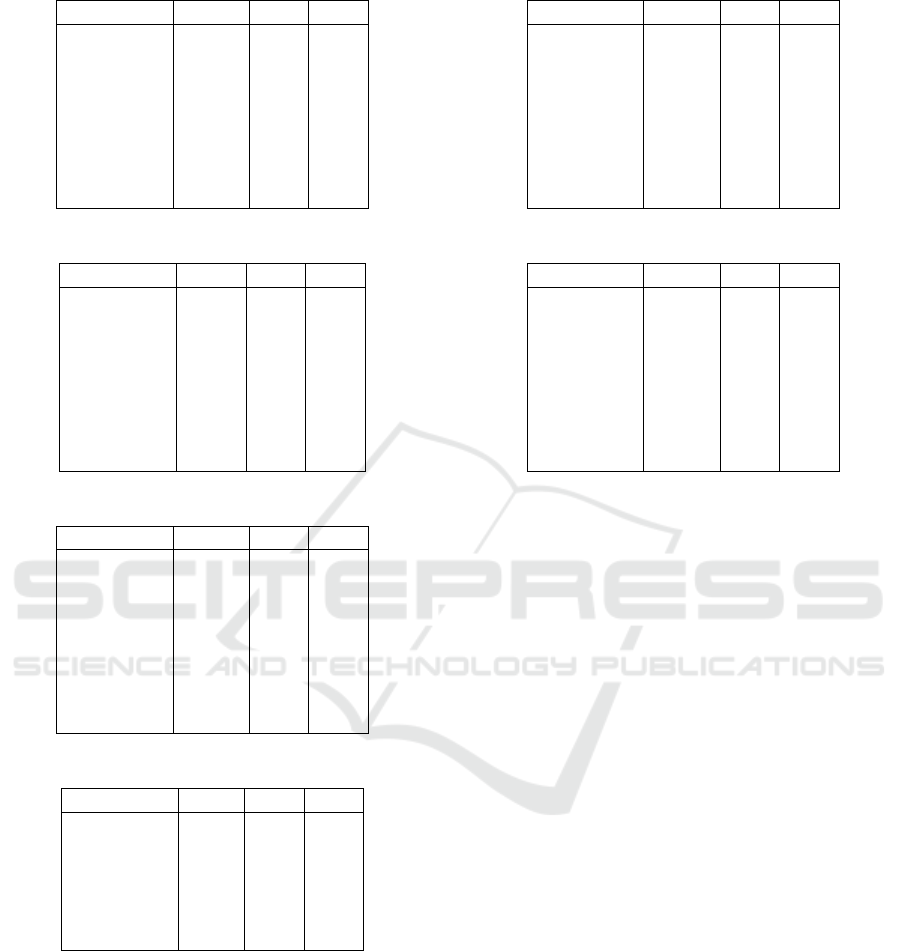
Table 7: Solutions for Walksat.
Benchmark Diff OR Ext
M2S -2.87 0.44 0.87
MC7 -5.91 0.29 0.55
MC8 -6.32 0.29 0.56
MCAH -4.81 0.40 0.78
M3SAH -2.28 0.30 0.49
M3SH -4.65 0.18 0.32
WM2S -29.22 0.61 0.90
WM3SH -7.53 0.49 0.75
Table 8: Solutions for Tabu Walksat.
Benchmark Diff OR Ext
M2S 3.94 0.43 0.82
MC7 3.01 0.27 0.53
MC8 3.04 0.29 0.55
MCAH 5.64 0.38 0.74
M3SAH 0.06 0.29 0.47
M3SH 0.24 0.17 0.31
WM2S 14.09 0.55 0.81
WM3SH 0.78 0.47 0.73
Table 9: Solutions for SAMD.
Benchmark Diff OR Ext
M2S -5.40 0.57 0.51
MC7 -10.88 0.39 0.36
MC8 -10.95 0.39 0.36
MCAH -13.65 0.47 0.47
M3SAH -4.67 0.48 0.32
M3SH -6.19 0.50 0.40
WM2S -36.90 0.44 0.50
WM3SH -30.60 0.54 0.48
Table 10: Solutions for VW2.
Benchmark Diff OR Ext
M2S 0.16 0.46 0.90
MC7 -3.28 0.31 0.59
MC8 -3.24 0.31 0.58
MCAH 0.66 0.41 0.81
M3SAH -2.82 0.32 0.52
M3SH -5.77 0.20 0.35
cluding branch-and-bound algorithms (Heras et al.,
2008; Larrosa et al., 2008; Li et al., 2007a; Heras
and Larrosa, 2008; Heras and Ba
˜
neres, 2013; Cherif
et al., 2020), Local Search algorithms (Heras and
Ba
˜
neres, 2010; Abram
´
e and Habet, 2012), and al-
gorithms based on iteratively calling to a SAT oracle
(Heras and Marques-Silva, 2011; Py et al., 2022).
In the context of SLS algorithms, in (Heras and
Ba
˜
neres, 2010) a number of preprocessors are intro-
duced based on the resolution rule and tested for sev-
eral local search algorithms. One is based on ap-
Table 11: Solutions for GSAT.
Benchmark Diff OR Ext
M2S -5.29 0.31 0.62
MC7 -4.23 0.15 0.36
MC8 -5.00 0.15 0.35
MCAH -4.13 0.21 0.51
M3SAH -3.08 0.19 0.34
M3SH -6.56 0.15 0.22
WM2S -10.76 0.35 0.51
WM3SH -4.50 0.28 0.47
Table 12: Solutions for IROTS.
Benchmark Diff OR Ext
M2S -0.26 0.67 0.58
MC7 -1.06 0.51 0.37
MC8 -1.02 0.51 0.37
MCAH -1.35 0.59 0.50
M3SAH -0.16 0.56 0.44
M3SH -3.48 0.70 0.39
WM2S -14.65 0.63 0.49
WM3SH -2.79 0.69 0.56
plying the resolution rule until saturation so that a
variable can be eliminated. The second one is based
on hyper-resolution rules applied to problems with
a specific structure mainly with binary hard clauses
and unit soft clauses. The last one is based on ap-
plying unit propagation to generate new unit clauses
and also new empty clauses. The latter two exhib-
ited notable performance improvements. In (Abram
´
e
and Habet, 2012), inference rules were embedded in
a local search solver, resulting in notable improved
performance.
In the context of the Weighted Constraint Satis-
faction Problem (WCSP), the extension operation is
commonly used in various forms of Soft Arc Consis-
tency for WCSP, such as DAC*, FDAC* and EDAC*
(Larrosa and Schiex, 2003; de Givry et al., 2005)
which results in an equivalent problem with an ex-
plicit lower bound. Additionally, in (de Givry et al.,
2003) it is shown how to solve Max-SAT as a WCSP
problem. The extension operation is commonly ap-
plied to transform unary constraints into binary ones
while maintaining the equivalence, but it can also be
applied to constraints of other sizes in WCSP. Hence,
the extension operation in WCSP is deeply related to
the Extension Rule (ER) for Max-SAT. Let us see an
example.
Example 5. Refer to Figure 1. (Weighted) Max-
SAT can be interpreted as a Weighted CSP, where all
variables can take only two values, and (weighted)
clauses are represented as tuples of values that incur
a cost (the weight of the clause) when assigned simul-
taneously. Case a) illustrates a WCSP problem with
Impact of Extended Clauses on Local Search Solvers for Max-SAT
83
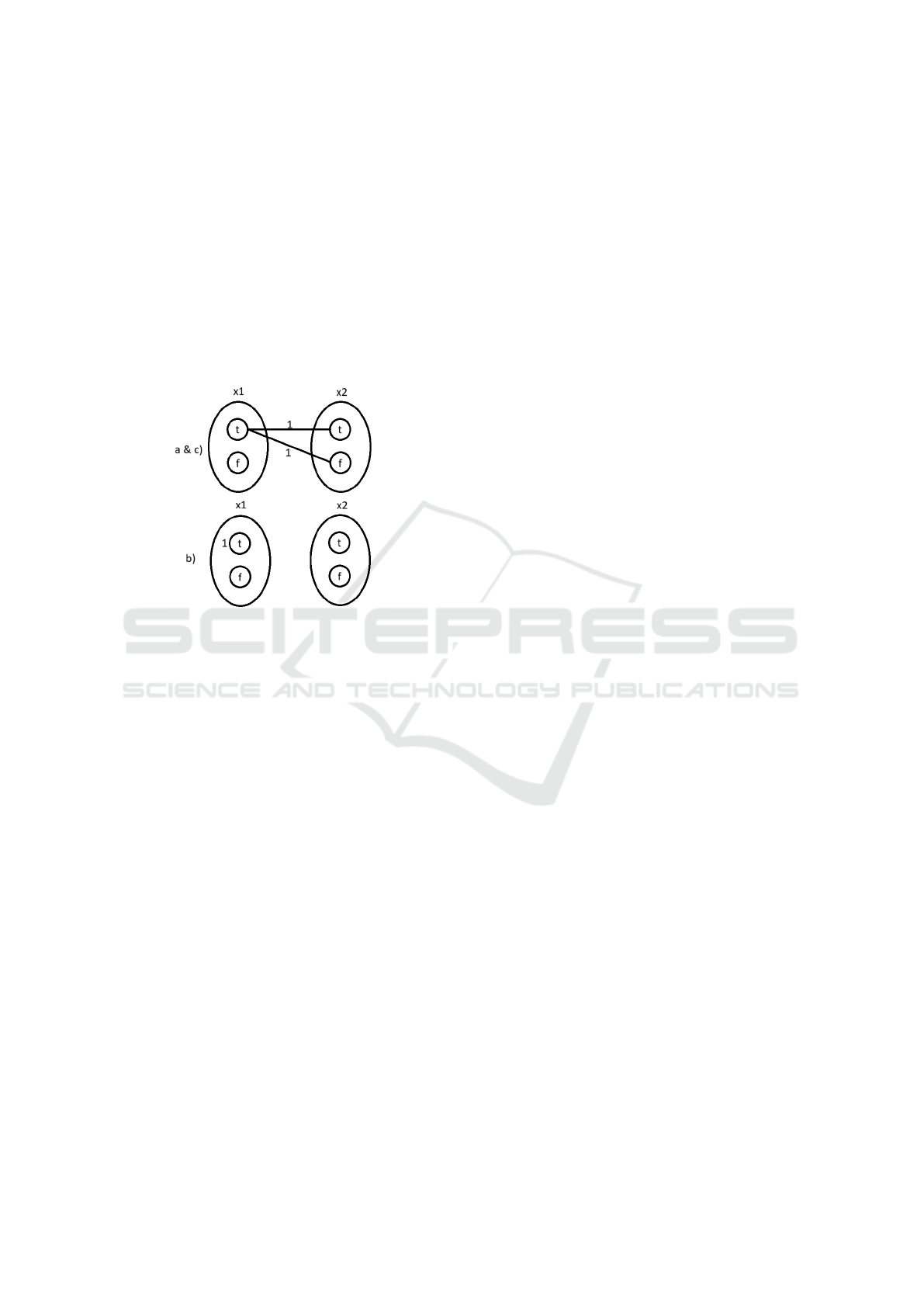
two variables, x
1
and x
2
, each having two possible
values (t and f ), and two binary constraints: when
x
1
= t and x
2
= t, a cost of 1 is incurred, and similarly
when x
1
= t and x
2
= f . In Max-SAT, this is equiva-
lent to the clauses (¯x
1
∨ x
2
, 1) and ( ¯x
1
∨ ¯x
2
, 1). Ap-
plying Soft Arc Consistency in a) results in an equiv-
alent problem in b), which reduces two binary con-
straints into a unary constraint x
1
= t with cost 1, that
is equivalent apply NRES and obtain clause (¯x
1
, 1) in
Max-SAT. However, applying the extension operation
to b) restores the original equivalent formula c), that
is equivalent to applying the Extension Rule in Max-
SAT context.
Figure 1: WCSP and Max-SAT relationship example.
In a recent work (Rollon and Larrosa, 2022), the
Extension rule was explicitly reintroduced for Max-
SAT and termed the split rule (Atserias and Lau-
ria, 2019). In such work, the extension rule is com-
bined with another rule that requires adding clauses
with negative weight. Its theoretical potential is ex-
perimented exclusively with Pigeon Hole Problem
(PHP) instances and it requires a handcrafted refu-
tation based on the PHP problem structure. In our
paper, we evaluated the application of the extension
(i.e. split) rule in SLS solvers using a new prepro-
cessor. Importantly, the preprocessor is not tied to
any specific problem or structure. This work repre-
sents the first contribution to show that the Extension
Rule can produce improved results from a practical
perspective.
6 CONCLUSIONS
In this paper, we proposed a Max-SAT preproces-
sor based on the Extension Rule (ER) (Atserias and
Lauria, 2019; Rollon and Larrosa, 2022), generat-
ing larger clauses in the resulting formula. Empiri-
cal evaluation with various SLS algorithms showed
notable performance improvements, especially for
Max-2-SAT instances. This finding is significant, as
many problems are naturally encoded as Max-2-SAT,
and some SAT problems can be reduced to Max-2-
SAT (Ans
´
otegui and Levy, 2021). Thus, achieving
good results in Max-2-SAT serves as a good starting
point. Previous work focused on shortening clauses
and reducing their number, under the assumption that
smaller formulas are better. Our study shows that
larger formulas can improve outcomes for specific
problems and SLS algorithms. Finally, we explored
the relationships between the Neighborhood and Ex-
tension Rules, and the extension operation in WCSP.
Several potential directions of future work within
this domain exist. Firstly, the development of more
sophisticated heuristics for selecting the arbitrary lit-
eral employed to extend the clauses could be pursued.
Additionally, incorporating a broader range of bench-
marks, particularly those including hard clauses (i.e.
partial Max-SAT), would be valuable to understand
whether the extension rule would benefit hard clauses
as well as soft ones. Furthermore, exploring the po-
tential of hybrid approaches that combine the exten-
sion rule with other known preprocessing techniques
or to consider developing heuristics to selectively ap-
ply the Extension rule, rather than applying it to all
clauses as in current preprocessor. Finally, investi-
gating the circumstances under which other algorithm
families, such as branch and bound or iterative calls
to SAT oracle approaches, might profit from similar
strategies.
REFERENCES
Abram
´
e, A. and Habet, D. (2012). Inference rules in local
search for max-sat. In ICTAI 2012, pages 207–214.
IEEE Computer Society.
Anbulagan, P., Pham, D. N., Slaney, J. K., and Sattar, A.
(2005). Old resolution meets modern SLS. In AAAI,
pages 354–359.
Ans
´
otegui, C. and Levy, J. (2021). Reducing SAT to
max2sat. In IJCAI 2021, pages 1367–1373. ijcai.org.
Atserias, A. and Lauria, M. (2019). Circular (yet sound)
proofs. In Proceedings of SAT 2019, volume 11628 of
LNCS, pages 1–18. Springer.
Bansal, V. and Bafna, V. (2008). Hapcut: an efficient and
accurate algorithm for the haplotype assembly prob-
lem. In Proceedings of European Conference on Com-
putational Biology (ECCB), pages 153–159.
Cha, B. and Iwama, K. (1996). Adding new clauses for
faster local search. In Proceedings of the AAAI 96 and
IAAI 96, pages 332–337. AAAI Press.
Cherif, M. S., Habet, D., and Abram
´
e, A. (2020). Under-
standing the power of max-sat resolution through up-
resilience. Artif. Intell., 289:103397.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
84

de Givry, S., Heras, F., Zytnicki, M., and Larrosa, J. (2005).
Existential arc consistency: Getting closer to full arc
consistency in weighted csps. In Proceedings of IJCAI
2005, pages 84–89. Professional Book Center.
de Givry, S., Larrosa, J., Meseguer, P., and Schiex, T.
(2003). Solving max-sat as weighted CSP. In
CP 2003, volume 2833 of LNCS, pages 363–376.
Springer.
Guerri, A. and Milano, M. (2003). CP-IP techniques
for the bid evaluation in combinatorial auctions. In
In Proceedings of CP 2003, LNCS, pages 863–867.
Springer.
Hansen, P. and Jaumard, B. (1990). Algorithms for the max-
imum satisfiability problem. Computing, 44(4):279–
303.
Heras, F. and Ba
˜
neres, D. (2010). The impact of max-
sat resolution-based preprocessors on local search
solvers. J. of Satisfiability, Boolean Modeling and
Computation (JSAT), 7(2-3):89–126.
Heras, F. and Ba
˜
neres, D. (2013). Incomplete inference for
graph problems. Optim. Lett., 7(4):791–805.
Heras, F. and Larrosa, J. (2008). A Max-SAT inference-
based pre-processing for max-clique. In Proceedings
of SAT 2008, pages 139–152.
Heras, F., Larrosa, J., and Oliveras, A. (2008). Mini-
MaxSAT: An efficient weighted Max-SAT solver. J.
Artif. Intell. Res. (JAIR), 31:1–32.
Heras, F. and Marques-Silva, J. (2011). Read-once res-
olution for unsatisfiability-based max-sat algorithms.
In In Proceedings IJCAI 2011, pages 572–577. IJ-
CAI/AAAI.
Hoos, H. H. (1999). On the run-time behaviour of stochastic
local search algorithms for sat. In In AAAI/IAAI 1999,
pages 661–666.
Hoos, H. H. (2002). An adaptive noise mechanism for
WalkSAT. In In AAAI/IAAI 2002, pages 655–660.
Larrosa, J., Heras, F., and de Givry, S. (2008). A logical
approach to efficient Max-SAT solving. Artif. Intell.,
172(2-3):204–233.
Larrosa, J. and Schiex, T. (2003). In the quest of the
best form of local consistency for weighted CSP. In
Proceedings of IJCAI 2003, pages 239–244. Morgan
Kaufmann.
Li, C., Many
`
a, F., and Planes, J. (2007a). New infer-
ence rules for Max-SAT. J. Artif. Intell. Res. (JAIR),
30:321–359.
Li, C. M., Wei, W., and Zhang, H. (2007b). Combining
adaptive noise and look-ahead in local search for SAT.
In Proceedings of SAT 2007, LNCS, pages 121–133.
Springer.
Lorenz, J. and W
¨
orz, F. (2020). On the effect of learned
clauses on stochastic local search. In In Proceedings
of SAT 2020, LNCS, pages 89–106. Springer.
McAllester, D. A., Selman, B., and Kautz, H. A. (1997).
Evidence for invariants in local search. In AAAI 97,
pages 321–326. AAAI Press / The MIT Press.
Niedermeier, R. and Rossmanith, P. (2000). New upper
bounds for maximum satisfiability. J. Algorithms,
36(1):63–88.
Pardalos, P. M. and Rebennack, S. (2010). Computational
challenges with cliques, quasi-cliques and clique par-
titions in graphs. In Experimental Algorithms In-
ternational Symposium (SEA), LNCS, pages 13–22.
Springer.
Prestwich, S. D. (2005). Random walk with continuously
smoothed variable weights. In SAT 2005, St. Andrews,
UK, June 19-23, volume 3569 of LNCS, pages 203–
215. Springer.
Py, M., Cherif, M. S., and Habet, D. (2022). Proofs and
certificates for max-sat. J. Artif. Intell. Res., 75:1373–
1400.
Rollon, E. and Larrosa, J. (2022). Proof complexity for
the maximum satisfiability problem and its use in SAT
refutations. J. Log. Comput., 32(7):1401–1435.
Selman, B., Kautz, H. A., and Cohen, B. (1994). Noise
strategies for improving local search. In AAAI, pages
337–343.
Selman, B., Levesque, H. J., and Mitchell, D. G. (1992). A
new method for solving hard satisfiability problems.
In AAAI-92, pages 440–446.
Smyth, K., Hoos, H. H., and St
¨
utzle, T. (2003). Iterated
robust tabu search for Max-SAT. In Canadian Con-
ference on AI, pages 129–144.
Strickland, D. M., Barnes, E., and Sokol, J. S. (2005).
Optimal protein structure alignment using maximum
cliques. Operations Research, 53(3):389–402.
Tompkins, D. A. D. and Hoos, H. H. (2004). UBCSAT: an
implementation and experimentation environment for
SLS algorithms for SAT and MAX-SAT. In In Pro-
ceedings of SAT 2004 Selected Papers, volume 3542
of LNCS, pages 306–320. Springer.
Impact of Extended Clauses on Local Search Solvers for Max-SAT
85
