
Real-Time Digital Twin for Construction Vehicle Stability Assessment
and Visualization with Improved Front-Loader Payload Estimation
Th
´
eo Tuerlinckx
1 a
, Sam Weckx
1 b
, Steven Robyns
1 c
and Jeroen D. M. De Kooning
2,3 d
1
MotionS Corelab, FlandersMake, 133 Oude Diestersebaan, 3920 Lommel, Belgium
2
Department of Electromechanical, Systems and Metal Engineering, Faculty of Engineering and Architecture,
Ghent University, Belgium
3
{theo.tuerlinckx, sam.weckx, steven.robyns}@flandersmake.be, jeroen.dekooning@ugent.be
Keywords:
Construction Vehicle, Digital Twin, Stability Assessment, Stability Visualization, Payload Estimation Method,
Multibody Modelling.
Abstract:
The stability assessment of construction vehicles, which are part of a constantly growing market, is of a high
importance for safety and working efficiency. For such vehicles, the stability is mainly impacted by the carried
payload. In this paper, a state of the art payload estimation method, based on simplified motion equations, is
further improved by coupling it with accurate real-time multibody modelling. An example, that allows to
reduce the important impact of joints damping on the payload estimation method, is developed and validated
in this paper. A reduction of the payload estimation moving window root mean square error from 12.8% to
2.9% is obtained. Finally, the tractor multibody digital-twin is integrated in a real-time system on a physical
setup, allowing to process the signals of the tractor and provide an easy to interpret visualization of the vehicle
stability to the operator.
1 INTRODUCTION
The market of construction vehicles, such as bull-
dozers, excavators, tractors with front-loader, etc, is
constantly growing because of the increase of con-
struction activities due the expansion of the human-
ity (MarkwideResearch, 2024). This trend is also
followed by an integration of Advanced Driver As-
sistance Systems (ADAS) to improve the safety and
efficiency of those vehicles (AlliedMarketResearch,
2024). The main study concern in this paper is the sta-
bility of construction vehicles. Going towards more
efficient construction means moving higher payloads
at higher speeds. This payload, whose value and ex-
act position are often unknown by the operator, can
lead to instability of the vehicle and even rollover
(Zhu et al., 2021). Additionally to the payload value
and position, the vehicle suspension plays an impor-
tant role for the vehicle stability while it is moving
(Cordos¸ and TodoruT¸ , 2019). However, this research
a
https://orcid.org/0000-0001-9780-0714
b
https://orcid.org/0000-0001-6983-495X
c
https://orcid.org/0000-0001-5898-7061
d
https://orcid.org/0000-0002-0358-4350
is only focusing on the payload estimation impact on
vehicle stability and not the suspension system.
A lot of research already focused on the anal-
ysis of stability behaviour in construction vehicles.
(Mitrev and Marinkovi
´
c, 2019) is performing a full
numerical study for the stability of an excavator, in-
cluding the tire suspensions, while (Edwards et al.,
2019) focuses on the risk of overturning. However,
both are assuming a known payload. (Lysych, 2020)
is using SolidWorks to study the dynamics of a trac-
tor, including working tools at the front and rear of
the vehicle, but without taking into account the move-
ment of those tools. (Baker and Guzzomi, 2013) is
analysing the stability of a tractor on a slope by in-
cluding the effect of the front axle-wheel mass, under-
lining the important impact of it on the overall Center
Of Gravity (COG) position but without including the
impact of the front-loader and its payload. It can be
seen that therefore most of the research about con-
struction vehicle stability assumes a know payload or
are not including the dynamics of the front-loader.
By looking at the state of the art in estimating
payload, the research of (Ferlibas and Ghabcheloo,
2021), that will be further analysed in this paper,
presents a novel approach for dynamic payload esti-
266
Tuerlinckx, T., Weckx, S., Robyns, S. and M. De Kooning, J. D.
Real-Time Digital Twin for Construction Vehicle Stability Assessment and Visualization with Improved Front-Loader Payload Estimation.
DOI: 10.5220/0013080500003941
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 266-277
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

mation on an excavator without including joints fric-
tion and damping. (Bennett et al., 2014) use a multi-
body model to study the impact of static and dy-
namic behaviour of an excavator on payload estima-
tion methods in simulation. Moreover, a state esti-
mator (Ishihara et al., 2021) or neural network (Huo
et al., 2023) can also be used to estimate payload of
construction vehicles. On the other side, other re-
searchers are focusing on accurate and complex mod-
eling of construction vehicles with multibody model-
ing (Pavlov and Dacova, 2021) or the finite element
method (Gralak and Walu
´
s, 2024), but also assume a
known payload.
This paper aims to bridge the gap between sim-
plified payload estimation methods and the accuracy
of multibody modeling. It focuses on developing a
digital twin of a tractor using Simscape Multibody,
including the hydraulic front-loader and suspension
systems. The digital twin is defined as a virtual replica
that acts and behaves like its physical counterpart,
with automated data transfer between the physical
system and the virtual model. The multibody model
is coupled with an adapted payload estimation method
and validated through experimental tests on a physi-
cal tractor setup. The research highlights the potential
to improve or analyze the stability of construction ve-
hicles by coupling multibody modeling with payload
estimation methods. It also presents an improved pay-
load estimation method that is robust to joint damp-
ing, which can significantly impact construction ve-
hicles. Finally, the digital twin is integrated into a
real-time system on the physical setup, allowing for
signal processing and 3D visualization of vehicle sta-
bility for the operator.
The paper is structured as follows. The second
section describes the theory, models, and methods
for tractor multibody modeling, payload estimation,
and stability assessment. Section 3 details experi-
ments validating these methods with field measure-
ments. Finally, the Section 4 discusses the results and
Section 5 provides a summary and outlook.
2 THEORY, MODELS AND
METHODS
In order to validate the improvement on construction
vehicle stability assessment and visualization, a rele-
vant industrial case of a construction vehicle is used.
A New Holland T7.175 SideWinder II tractor with a
Still front loader 770TL is modelled as a multi-body
model and used as real physical setup for data collec-
tion. The physical setup is also used to gather sig-
nals that will be used as input for the model such
as the front-loader positions or hydraulic pressures.
The tractor has a front-loader actuated by an hydraulic
system with different possibilities of working imple-
ments (i.e. a bucket or a fork). The suspension system
is made of a front-axle TerraGlide suspension devel-
oped by New Holland.
In order to assess the stability of the tractor, firstly,
an estimation of the front-loader payload is calcu-
lated. Secondly, the tractor center of gravity is com-
puted based on the weight distribution. Thirdly, the
tractor stability is discussed, taking into account the
influence of the tractor pitch. Finally the visualization
of the tractor stability to the vehicle operator and the
overall real-time implementation architecture are de-
picted. The following subsections describe the phys-
ical and simulated model and the real-time methods
and architecture used for front-loader payload estima-
tion and stability assessment and visualization.
2.1 Physical Setup
The T7.175 tractor physical setup can be seen in Fig-
ure (1). The setup is made of two main subsystems :
the front-loader hydraulic system and the suspensions
system, which are described in the section below.
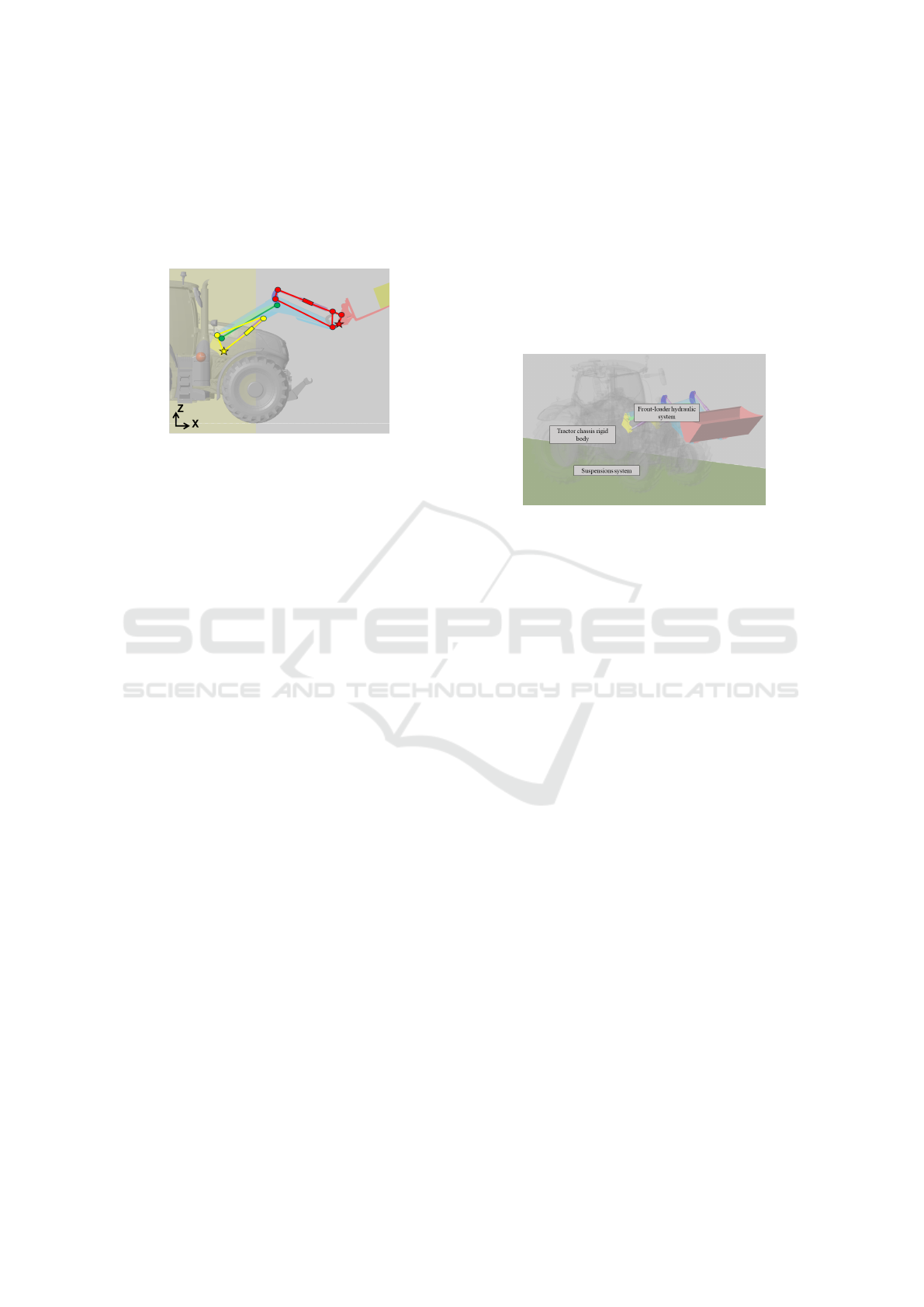
Figure 1: Tractor physical setup.
2.1.1 Front-Loader Hydraulic System
The front-loader has two main degrees of freedom
(DOF). The main arm (blue part in Figure (2)) rotates
along the Y-axis relative to the tractor chassis (see yel-
low star in Figure (2)), and the implement (red part)
rotates along the Y-axis relative to the arm tip (see
red star). A hydraulic pump, driven by the tractor’s
engine, provides pressure and flow to the hydraulic
cylinders (schematized as the yellow and red rectan-
gle), which are part of a kinematic closed loop. This
means the movements of the rotational DOFs are di-
rectly linked to the translational motions of the hy-
draulic cylinders.
Hydraulic flow is controlled by a lever, and
the pump adjusts pressure based on the payload to
achieve the desired movement. A system of valves
maintains pressure in the hydraulic cylinders when
Real-Time Digital Twin for Construction Vehicle Stability Assessment and Visualization with Improved Front-Loader Payload Estimation
267
the front-loader is stationary, allowing it to carry
heavy loads without consuming power. Additionally,
a payload stabilization system (green bar) ensures the
implement remains stable when the main arm moves,
preventing the payload from falling off by linking the
two DOF’s.
Figure 2: Front-loader degrees of freedom.
2.1.2 Suspensions System
The main suspension behavior of a tractor comes
from the tire radial stiffness and damping that makes
the connection between the chassis and the ground
(Cuong et al., 2013). Additionally to this, a Ter-
raGlide front-axle suspension system has been de-
veloped by NewHolland (New Holland Agriculture,
2024).
2.1.3 Sensors
The setup includes multiple sensors and an Industrial
PC for processing sensor signals. Key components
are:
• Leopard Imaging GMSL AR0231 camera: Es-
timates angles of the front-loader’s main arm
and implement using low cost vision methods
(Robyns et al., 2024).
• PU501E pressure sensors: Measure pressure in
both chambers of the hydraulic cylinders.
• Xsense MTi-30 Inertial Measurement Units
(IMU): Provide roll and pitch measurements, with
one unit on the chassis below the cabin and an-
other on the front-axle below the suspension pivot
point.
2.2 Simulation Multi-Body Model
A digital-twin of the tractor physical model is built
in order to develop and validate the front-loader pay-
load estimation and stability assessment as well as the
visualization methods. The simulation model is im-
plemented in the MATLAB environment, using the
Simscape Multibody Library for simulating the trac-
tor multi-body model while Simulink is used for post
and pre-processing of the signals (e.g. computation
of the hydraulic cylinder forces, payload estimation
method, ...).
The Figure (3) shows the 3D visualization of the
tractor Simscape Multibody model. The main chas-
sis rigid body is imported as one CAD file while the
two other subsystems, the suspensions and the front-
loader hydraulics, are explained in more details in the
following subsections.
Figure 3: 3D visualization of the Tractor Simscape Multi-
body model with underlined subsystems.
2.2.1 Front-Loader Hydraulic System
The front-loader hydraulic system has two closed-
loops for the main arm and implement on both sides,
but only the right side is actuated in the simulation
for simplicity. As the main arm and implement are
modeled as rigid bodies, the left side of the model
will follow the same movement. The kinematic close-
loops are modeled in Simscape Multibody using pris-
matic and revolute joints, with one joint actuated by
input and others automatically computed. The physi-
cal setup uses prismatic joints for actuation, while the
simulation uses the revolute joints, demonstrating the
benefits of a low-cost camera sensor for their position
measurement (Robyns et al., 2024).
The front-loader payload estimation method re-
quires the computation or measurement of torque in
the DOF joints. In a Simscape Multibody model,
this torque can be directly extracted from the revolute
joints and is based on component inertias, payload,
and front-loader movement. A virtual payload can
be simulated by adding a variable mass component
to the implement. However, in real industrial applica-
tions where the payload is unknown, the method must
compute the joint’s torque using regular sensors with
the following approach.
Knowing the pressure in the hydraulic cylinders,
their forces can be computed as the difference in force
between the two chambers:
F = F
Ch
A
− F
Ch
B
(1)
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
268
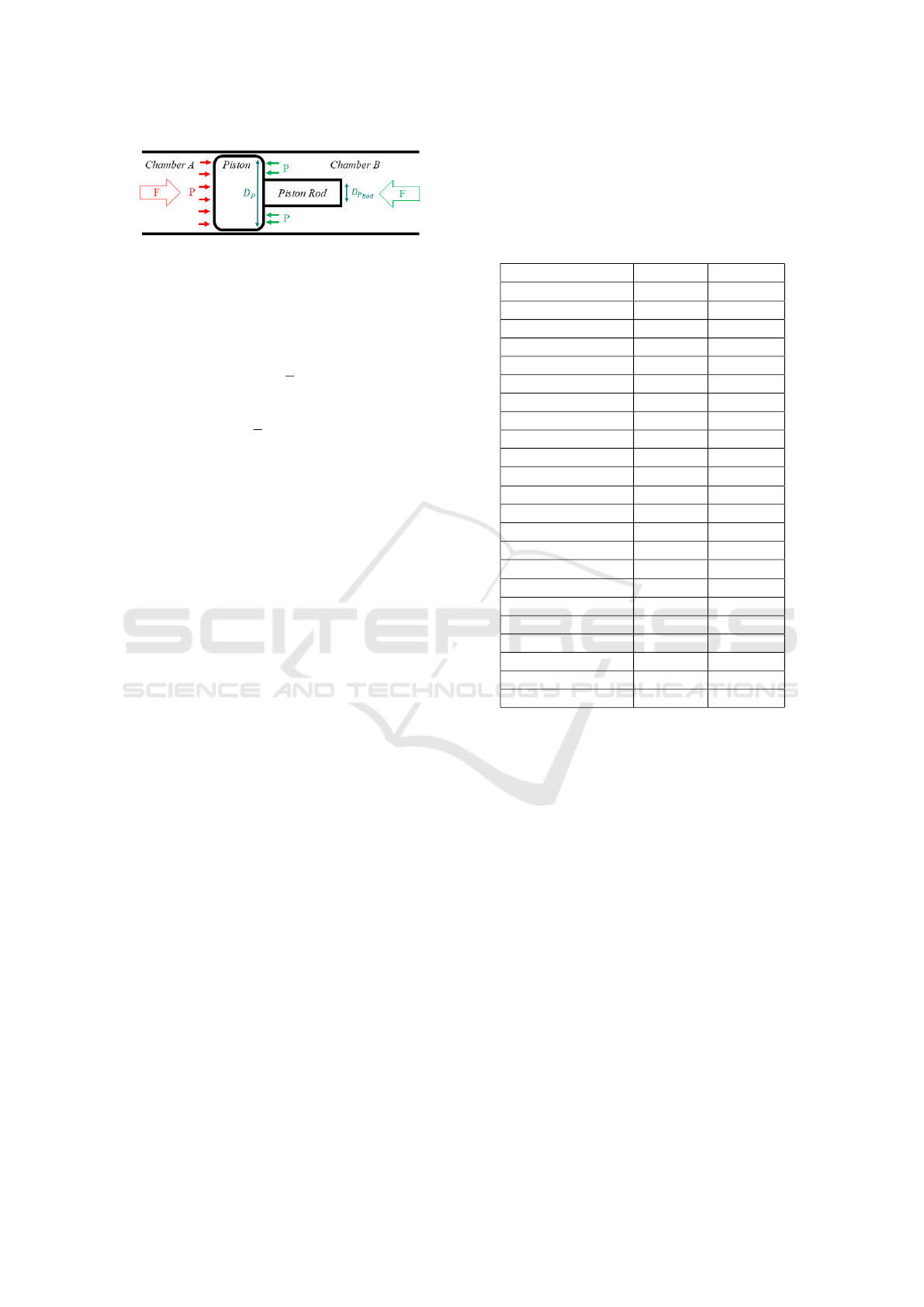
Figure 4: Hydraulic cylinder schematic.
with:
F = A · P (2)
With P the hydraulic pressure in Pascal and A the
chamber bore area in m
2
(see Figure (4)):
A
Ch
A
=
π
4
· D
2
P
(3)
and
A
Ch
B
=
π
4
·
D
2
P
− D
2
P
Rod
(4)
Regarding the hydraulic pressure, this one is mea-
sured before the chambers. In order to account for the
pressure loss in the hydraulic circuit between the sen-
sors and the chambers (i.e. junction, bend, etc), the
pressure measurement is multiplied by an efficiency
factor:
P = P
m
· η
P
(5)
Once the hydraulic cylinder force is computed, it
can be applied as an input force to the cylinder pris-
matic joint of the model. The Simscape Multibody
model, by multiplying those forces with the cylinder
jacobians, can directly extract the torque in the DOF
revolute joints, knowing the hydraulic cylinder pres-
sure and corresponding DOF’s positions. The torques
are computed with a multibody model with compo-
nents with an infinitely small density and no payload
in the implement as the hydraulic pressure measure-
ment on the physical setup already includes those el-
ement effects.
2.2.2 Suspensions System
This subsystem is modelled and validated using the
IMU’s measurement with the tractor at standstill.
However the rolling vehicle with acceleration and de-
celeration is not yet modelled. Therefore, the study of
the impact of the suspension subsystem on the vehicle
stability is not further investigated here.
2.2.3 Solver and Parameters Value
Simscape Multibody uses a fixed time step to solve
the equations of motion for the mechanical system.
Simulink systems (i.e. computation of the hydraulic
cylinder force, payload estimation, etc.) use a fixed
step solver (Bogacki–Shampine) for third-order ordi-
nary differential equations. The time step allows real-
time simulation, enabling integration into a physical
setup for stability assessment and smooth visualiza-
tion.
Finally, the overall parameter values of the multi-
body model are summarized in the Table (1).
Table 1: Tractor multibody-model parameters.
Parameters Units Value
ρ kg/m
3
5500
M
Tractor
kg 6000
M kg 10
D
Piston,Arm
m 0.1475
D
PistonRod,Arm
m 0.0381
η
P,Arm
% 0.58
D
Piston,Implement
m 0.1079
D
PistonRod,Implement
m 0.0165
η
P,Implement
% 0.69
a
2
m 2.97
I
arm
kgm
2
780.8
M
arm
kg 1320
α
3
rad 0.23
r
3
m 1.42
a
3
m 2.85
I
imp
kgm
2
34.59
M
imp
kg 272.7
α
4
rad 0.2663
r
4
m 0.4723
C
HC,Arm
N/(m/s) 3.9e+05
C
HC,Implement
N/(m/s) 1.15e+05
T s
Simscape
s 1e-03
T s
Simulink
s 1e-03
2.3 Front-Loader Payload Estimation
The front-loader payload estimation used within this
paper is based on (Ferlibas and Ghabcheloo, 2021)
and schematized in Figure (5). The front-loader can
be considered as a three-revolute joint manipulator in
the vertical plane with the tractor pitch, the main arm
and the implement joint. The dynamic torque equa-
tions of that manipulator are rewritten in a decoupled
form as the linear combination of dynamic gravita-
tional parameters and functions of joint angles, ve-
locities, and accelerations. A measurement campaign
without payload on the physical setup can then be per-
formed to measure the joint torques with their corre-
sponding joint position and speed. A least squares es-
timation can then be used to identify the gravitational
parameters for a joint configuration without payload.
Therefore, when performing a measurement with pay-
load, the relation between the actual with-load torque
can be made with the estimated without-load torque
using the gravitational parameters. From this rela-
Real-Time Digital Twin for Construction Vehicle Stability Assessment and Visualization with Improved Front-Loader Payload Estimation
269

tion, an estimation of the payload can be computed
(Ferlibas and Ghabcheloo, 2021). The summarized
method is now presented in more details.
As the front-loader can be considered as a three-
revolute joint manipulator in the vertical plane, the
dynamics can be described with the following equa-
tion (Ferlibas and Ghabcheloo, 2021):
τ = D(Θ)
¨
Θ +C(Θ,
˙
Θ) + G(Θ) (6)
With:
• τ: the joint torque vector
• Θ: the vector of joint angles
• D(Θ): the inertia matrix
• C(Θ,
˙
Θ): the vector of Coriolis and centrifugal
terms
• G(Θ): the gravity torque vector
And with the corresponding schematic diagram in
Figure (6) where θ
2
is the pitch angle, θ
23
the arm
angle and θ
234
the implement angle.
As explained above, the torque equation (6) can
be rewritten in a decoupled form as the linear combi-
nation of dynamic gravitational parameters, π, and a
matrix Y function of joint angles, velocities, and ac-
celerations:
τ = Y (Θ,
˙
Θ,
¨
Θ)π (7)
By neglecting the friction and damping in the
joints, the linear torque equations can be obtained us-
ing Euler-Lagrange method (Ferlibas and Ghabche-
loo, 2021):
τ4 = (I
imp
+ M
imp
r
2
4
)
¨
θ
234
+ M
imp
a
2
r
4
[
¨
θ
2
cos(θ
34
+ α
4
) +
˙
θ
2
2
sin(θ
34
+ α
4
)]
+ M
imp
a
3
r
4
[
¨
θ
23
cos(θ
4
+ α
4
) +
˙
θ
2
23
sin(θ
4
+ α
4
)]
+ M
imp
gr
4
cos(θ
234
+ α4)
τ3 = τ4 + (I
arm
+ M
arm
r
2
3
+ M
imp
a
3
2
)
¨
θ
23
+ M
imp
a
2
a
3
[
¨
θ
2
cos(θ
3
) +
˙
θ
2
2
sin(θ
3
)]
+ M
imp
a
3
r
4
[
¨
θ
234
(θ
4
+ α
4
) −
˙
θ
2
234
sin(θ
4
+ α
4
)]
+ M
arm
a
2
r
3
[
¨
θ
2
(θ
3
+ α
3
) +
˙
θ
2
2
sin(θ
3
+ α
3
)]
+ M
imp
ga
3
cos(θ
23
) + M
arm
gr
3
cos(θ
23
+ α
3
)
(8)
With:
• I
arm
,I
imp
: the moments of inertia of the main arm
and implement respectively
• M
arm
,M
imp
: the masses of the main arm and im-
plement respectively
• a
2
: the linear distance between the pitch joint and
the arm joint
• a
3
: the linear distance between the arm joint and
the implement joint, also called the arm length in
that paper.
• α,r: the polar coordinates of the center of gravity
of the arm
3
and the implement
4
.
Note that the torque equation of the pitch τ
2
has
not been written as the pitch torque is not measured
on the physical setup and therefore cannot be used.
2.3.1 Dynamic Estimation of the Payload
Now that the torque equations have been described,
they can be rewritten in the matrix form of (7), (Fer-
libas and Ghabcheloo, 2021):
τ
4
τ
34
=
y
11
0 y
13
y
14
0 0
0 y
22
y
23
y
24
y
25
y
26
π
d1
π
d2
π
s1
π
s2
π
s3
π
s4
(9)
with τ
34
= τ
3
− τ
4
and:
y
11
=
¨
θ
234
y
13
= a
2
¨
θ
2
cos(θ
34
) + a
2
˙
θ
2
2
sin(θ
34
) + a
3
¨
θ
23
cos(θ
4
)
+ a
3
˙
θ
2
23
sin(θ
4
) + gcos(θ
234
)
y
14
= − a
2
¨
θ
2
sin(θ
34
) + a
2
˙
θ
2
2
cos(θ
34
) − a
3
¨
θ
23
sin(θ
4
)
+ a
3
˙
θ
2
23
cos(θ
4
) − gsin(θ
234
)
y
22
=
¨
θ
23
y
23
= a
3
¨
θ
234
cos(θ
4
) − a
3
˙
θ
2
234
sin(θ
4
)
y
24
= − a
3
¨
θ
234
sin(θ
4
) − a
3
˙
θ
2
234
cos(θ
4
)
y
25
= a
2
¨
θ
2
cos(θ
3
) + a
2
˙
θ
2
2
sin(θ
3
) + gcos(θ
23
)
y
26
= − a
2
¨
θ
2
sin(θ
3
) + a
2
˙
θ
2
2
cos(θ
3
) − gsin(θ
23
)
(10)
Using that set of linearized equations, the gravita-
tional parameters π can be estimated using the Least
Squares Estimation method with a set of measure-
ments (without payload) of the joints torque without
payload τ and joints position θ. As the joints velocity
˙
θ and acceleration
¨
θ are not measured on the physical
setup, their values are simplified as the derivatives of
the position.
Thereafter, when adding a payload M
pl
in the im-
plement, assuming that the implement center of grav-
ity is fixed and does not change depending on the
variable load weight in the implement (Ferlibas and
Ghabcheloo, 2021), the difference between the loaded
arm torque τ
3
and the loaded implement torque τ
4
(i.e.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
270

Physical Setup Tractor
measurements without load
Pitch, Arm and Implement position, velocity and acceleration 𝜃,
ሶ
𝜃,
ሷ
𝜃 [rad, rad/s, rad/s²]
Hydraulic Cylinder
chambers pressure [Pa]
Cylinder
Geometry
Cylinder force
[N]
Cylinder
Jacobians
Arm and Implement
torque τ [Nm]
Reworked torque
equations of a
robot manipulator
Compute Gravitational
Parameters π [kgm] : least-squares
solution (using multiples tractor
joints configurations)
Physical Setup
Tractor measurement
with load
Pitch, Arm and Implement position, velocity and acceleration 𝜃,
ሶ
𝜃,
ሷ
𝜃 [rad, rad/s, rad/s²]
Computation of no-load
Arm and Implement torque
Gravitational
Parameters π [kgm]
Arm and Implement
without load torque 𝜏
𝑁𝐿
[Nm]
Computation of
payload 𝑀
𝑃𝐿
from
reworked torque
equations
Arm and Implement
torque 𝜏
𝐿
[Nm]
Cylinder chambers
pressure [Pa]
Cylinder
Geometry
Cylinder force
[N]
Cylinder
Jacobians
See Figure (6)
See Equation (9)
See Equations
(12) and (13)
Figure 5: Front-loader payload estimation overall method.
Figure 6: Three-revolute joint manipulator schematic dia-
gram (Tafazoli et al., 1999).
τ
34
= τ
3
− τ
4
) can be defined by replacing M
imp
by
M
imp
+ M
pl
in the equations (8):
τ
L,34
= (I
arm
+ M
arm
r
2
3
+ (M
imp
+ M
pl
)a
3
2
)
¨
θ
23
+ (M
imp
+ M
pl
)a
2
a
3
[
¨
θ
2
cos(θ
3
) +
˙
θ
2
2
sin(θ
3
)]
+ (M
imp
+ M
pl
)a
3
r
4
¨
θ
234
(θ
4
+ α
4
)
− (M
imp
+ M
pl
)a
3
r
4
˙
θ
2
234
sin(θ
4
+ α
4
)
+ M
arm
a
2
r
3
[
¨
θ
2
(θ
3
+ α
3
) +
˙
θ
2
2
sin(θ
3
+ α
3
)]
+ (M
imp
+ M
pl
)ga
3
cos(θ
23
)
+ M
arm
gr
3
cos(θ
23
+ α
3
) (11)
That equation can be rewritten as the difference
between the loaded torque τ
L,34
(11) and a no-loaded
torque τ
NL,34
(8):
τ
L,34
− τ
NL,34
= M
pl
a
3
2
¨
θ
23
+ M
pl
a
2
a
3
[
¨
θ
2
cos(θ
3
) +
˙
θ
2
2
sin(θ
3
)]
+ M
pl
a
3
r
4
¨
θ
234
(θ
4
+ α
4
)
− M
pl
a
3
r
4
˙
θ
2
234
sin(θ
4
+ α
4
)
+ M
pl
ga
3
cos(θ
23
) (12)
Finally, the payload estimation M
pl
can be isolated
as:
M
pl
=
τ
L,34
− τ
NL,34
a
3
2
¨
θ
23
+ a
2
a
3
[
¨
θ
2
cos(θ
3
) +
˙
θ
2
2
sin(θ
3
)]
+a
3
r
4
[
¨
θ
234
(θ
4
+ α
4
) −
˙
θ
2
234
sin(θ
4
+ α
4
)]
+ga
3
cos(θ
23
)
(13)
Where, for a measured joints state (θ,
˙
θ,
¨
θ), τ
L,34
is directly computed from the physical setup pressure
measurements and τ
NL,34
is estimated using the grav-
itational parameters and equations (9).
2.3.2 Robustness to Hydraulic Damping
As shown in the previous equations, the payload es-
timation method is not accounting for joints damp-
ing and friction in order to allow a linearisation of the
torque equations. However, off-road vehicles are of-
ten working with robust joints actuated by hydraulics,
therefore inducing a significant joints friction and
damping, as it is observed on the physical setup mea-
surement of Figure (10).
In order to improve the accuracy of the payload
estimation, the hydraulic force computation presented
in Section 2.2.1 is further adapted by reducing the ef-
fect of the damping
1
. For that, a damping force is
subtracted to the force computed in (2):
F = A · P − F
damp
(14)
with:
F
damp
= C
HC
· v
HC
(15)
with C
HC
the hydraulic cylinder damping coefficient
and v
HC
the hydraulic cylinder velocity in m/s. The
1
The friction is not analysed within that research but
can use a similar approach.
Real-Time Digital Twin for Construction Vehicle Stability Assessment and Visualization with Improved Front-Loader Payload Estimation
271

parameter C
HC
can then be optimized in order to
match the ideal torque from simulation (i.e. without
damping) with the new adapted model as explained in
Section 3.1 and validated in Section 4.1.
2.4 Stability Assessment and
Visualization
Now that the unknown payload in the tractor front-
loader has been estimated, the overall stability of the
vehicle can be assessed. The tractor stability is mainly
evaluated by its Center Of Gravity position. A tractor
will remain stable as long as the overall COG stay in
the tractor stability baseline delimited as the horizon-
tal projection of the imaginary lines passing by the
four wheel-ground contacts (Murphy, 2022):
Figure 7: Tractor stability baseline (Murphy, 2022).
The tractor stability baseline is first defined by the
tractor track width and wheel base, see Figure (7).
However this baseline is also influenced by the tractor
roll and pitch. As it can be seen on Figure (8), the hor-
izontal projection of the lines passing by the two rear
wheels is smaller in the right configuration, therefore
reducing the stability area.
Figure 8: Influence of tractor stability baseline and COG
position on stability assessment (Murphy, 2022).
Secondly the stability is influenced by the COG
position. In the right configuration of Figure (8), the
tractor with a raised COG becomes unstable as the
point is going out of the stability baseline. From a
physical point of view, it means that the roll moment
of force around the right wheel-ground contact point
will make the tractor roll over in the clockwise direc-
tion.
2.4.1 Center of Gravity Position Evaluation
Knowing the COG position is therefore of high im-
portance to evaluate the tractor stability. The ini-
tial fixed COG position of the tractor can be directly
computed from the tractor geometry and components
weights, including additional working tools, counter-
balancing weights, etc. However, during operation,
the COG will also be impacted by the moving pay-
load in the front-loader. For example, a heavy pay-
load in a raised front-loader can lead to the unstable
case depicted with raised COG in Figure (8).
In simulation, the following approach is used to
evaluate the COG position. A first model is simu-
lated, without payload in the implement and without
components density. Using the hydraulic force mea-
surement as input with the corresponding joint states,
the payload is estimated as an output using the method
from Section 2.3.1. Then a second model is used with
the similar joint states, with component density and
a virtual mass in the implement using the value from
the first model output. Finally, the COG position can
be extracted from that group of body elements using
the Inertia Sensor block from Simscape Multibody.
2.4.2 Visualization Demonstration
It is essential to present the stability assessment to the
vehicle operator in a manner that is intuitive and easy
to interpret. Based on this visualization, the operator
can evaluate whether adjustments to the planned vehi-
cle trajectory are necessary or if additional measures,
such as adding counterweights, are required to en-
sure stability. To facilitate the operator’s understand-
ing, a 3D visualization of the vehicle is preferred over
purely numerical or graphical representations.
Furthermore, it is preferable for the operator to
have access to a single, integrated visualization that
consolidates various aspects of vehicle operation,
rather than multiple, separate displays. This visual-
ization should accommodate additional functionali-
ties beyond stability assessment, such as monitoring
vehicle component performance. A versatile solution
is proposed using a gaming engine (Unreal Engine)
which can easily be deployed as a standalone exe-
cutable.
Coming back to the digital twin definition men-
tionned in Section 1, the visualization to the operator
is here referring to the information flow from the vir-
tual to physical system.
2.5 Real-Time Implementation
Architecture
The described payload estimation method and sta-
bility assessment must be effectively integrated to
ensure a real-time system in which (1) payload es-
timation and stability assessment are continuously
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
272
updated based on sensor inputs, and (2) the result-
ing output is accurately visualized for the operator.
This integration requires the coordination of multi-
ple software tools—Matlab/Simulink/Simscape, Un-
real Engine, and Python scripts for sensor data pro-
cessing—among which data must be transmitted.
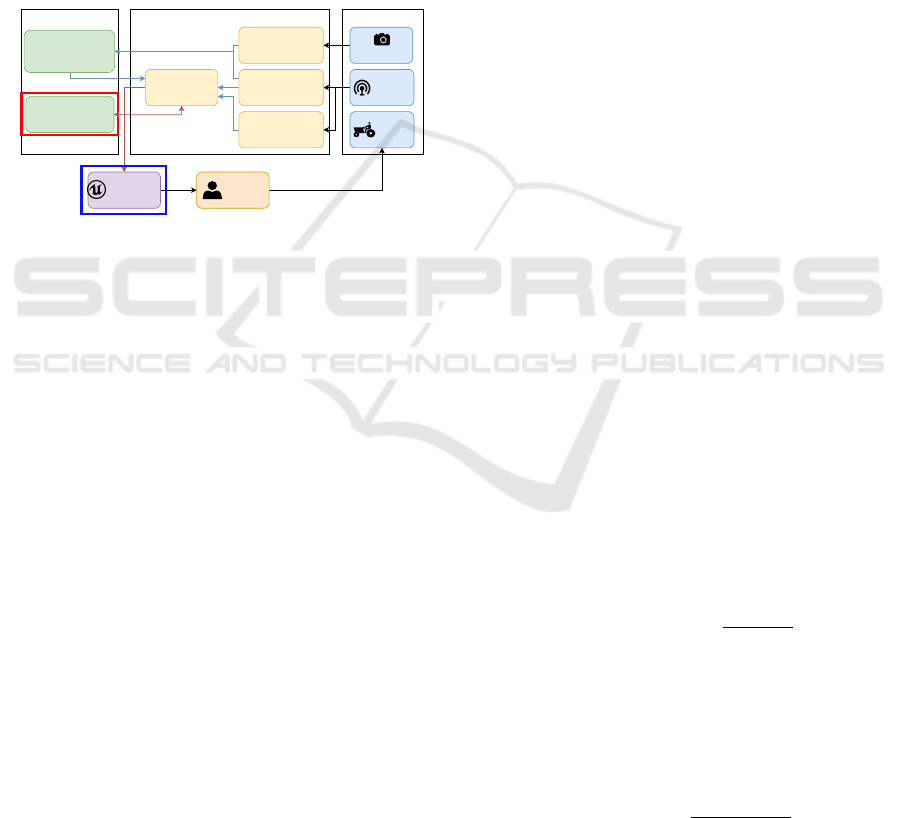
The complete system architecture is illustrated in
Figure (9), where the multibody model and visual-
ization components are highlighted in red and blue,
respectively. The ROS (Robot Operating System)
serves as the communication middleware within this
architecture, facilitating data exchange between dif-
ferent software components, as indicated by the blue
arrows in Figure (9).
Data processing Data interface Motion System
Camera
Sensors
Tractor
Operator
NVIDIA drive PC
Image conversion
Industrial PCs
Sensor signals
conversion
Industrial PCs
Transformation
frame calculation
Linux PC
Data converter
Unreal
Rendering
Matlab PC
Multibody CAD
cosimulation
Linux PC
Pose estimation
(arm & implement)
Figure 9: Real-time implementation architecture.
However, since communication between Sim-
scape and ROS, as well as Unreal Engine and ROS,
requires additional toolboxes or third-party plugins,
the implementation instead utilizes UDP, indicated by
the red arrows. UDP is preferred over TCP because
it can tolerate occasional data loss, as it is solely in-
tended for visualization purposes, where minimizing
delays is critical for providing real-time feedback to
the operator. Data centralization and conversion be-
tween ROS and UDP are managed by the ”Data Con-
verter” component.
3 EXPERIMENTS AND
ASSUMPTIONS
As the setup, models and methods have been de-
scribed in the previous section, this section focuses
on the experiments executed as well as the assump-
tions used. In this research, four main models and
methods need to be validated and are therefore listed
in the following subsections.
3.1 Hydraulic System
The hydraulic model with reduced impact of damp-
ing is validated with the following experiment. The
tractor is placed at standstill, a known payload M
pl
=
475kg is placed in the implement (i.e a bucket full of
sandbags) and the front-loader is dynamically actu-
ated with different positions while all the signals from
sensors listed in the Section 2.1.3 are logged.
With a first simulation, the arm and implement joint
torque can be extracted from a model without virtual
payload and without component density but by using
the hydraulic force measurement as input (see Section
2.2.1). Then a second simulation can be run using the
similar joint states, a virtual known mass in the imple-
ment and component density. Therefore, in the sec-
ond simulation, the ideal joint torque without damp-
ing and stiffness can be directly extracted for a given
payload (and without using the hydraulic force input
from the physical setup). In that way, the hydraulic
model of the first simulation can be adapted with a
damping force in order to match the ideal model of
the second simulation.
3.2 Payload Estimation
First, a calibration measurement needs to be per-
formed on the physical setup without payload and
by applying a dynamic movement to the front-loader.
Then a first model without virtual payload, with-
out components density but using the hydraulic force
measurement as input is simulated. From the joints
torque computation of that model, the gravitational
parameters of the payload estimation method can be
extracted using the Least Squares Estimation method
as explained in Section 2.3.1. The validation of the
payload estimation method can then use a similar
measurement as for the validation of the hydraulic
system. The pressure and joints state measurement
from the physical setup with a known payload M
pl
=
475kg are used as inputs for the payload estimation
method that outputs an estimated value of the pay-
load overtime
ˆ
M. The mean of the estimation error in
percent can be expressed as following:
¯
E = 100 · mean
tε[T
0
,T
end
]
ˆ
M − M
pl
M
pl
(16)
In order to reduce the error caused by unmodeled
dynamic effects, a moving Root Mean Square (RMS)
value of the payload estimation can be computed such
that an operator of the tractor can have a steady esti-
mation of the payload in real-time. The moving RMS
value is computed as follow during the simulation:
ˆ
M
MvRMS
=
r
mean
tεT
Window
(
ˆ
M
2
) (17)
With T
Window
= 10s the time of the moving win-
dow.
Real-Time Digital Twin for Construction Vehicle Stability Assessment and Visualization with Improved Front-Loader Payload Estimation
273
Finally the overall error of the moving window value
can be expressed in an error in percent as for
ˆ
M:
¯
E
MvRMS
= 100 · mean
tε[T
0
,T
end
]
|
ˆ
M
MvRMS
− M
pl
M
pl
| (18)
3.3 Stability Assessment and
Visualization
To assess the tractor stability, the stability baseline
and COG position need to be evaluated. Regarding
the stability baseline, this one can be easily extracted
from the physical setup or simulation knowing the
wheels position and the tractor roll and pitch. There-
fore, an accurate estimation of the roll and pitch from
IMU measurement leads to an accurate estimation of
the stability baseline. Although, regarding the COG
position, this one is more difficult to measure on the
physical setup as it requires to know the weight dis-
tribution on the wheels in different vehicle roll-pitch
positions. It was therefore not possible to validate the
COG position with physical measurement. Neverthe-
less, the COG position is first impacted by the over-
all components CAD files accuracy, densities and the
accuracy of their respecting COG position computa-
tion, which is not part of this research. Secondly, the
overall COG is impacted by the front-loader position
and the payload in its implement. The accuracy of the
overall COG position is therefore assumed to be di-
rectly linked to the accuracy of the payload estimation
discussed in the Section 4.2. For the purposes of visu-
alization, it was assumed that the COG moves only in
the forward and upward directions, while remaining
centrally positioned along the vehicle’s width. Conse-
quently, the stability assessment is focused solely on
potential tip-over in the pitch direction. As a result, a
side view is deemed sufficient for operator visualiza-
tion, and a front view—highlighting any asymmetry
across the vehicle’s width—is not necessary.
4 RESULTS AND DISCUSSIONS
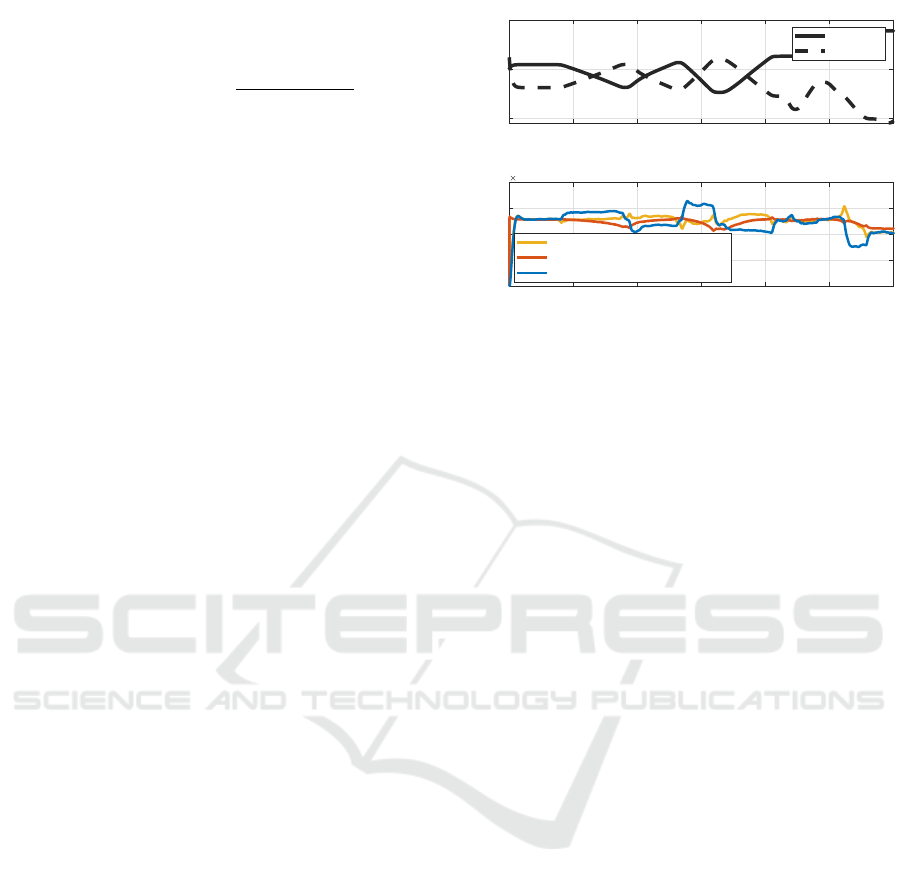
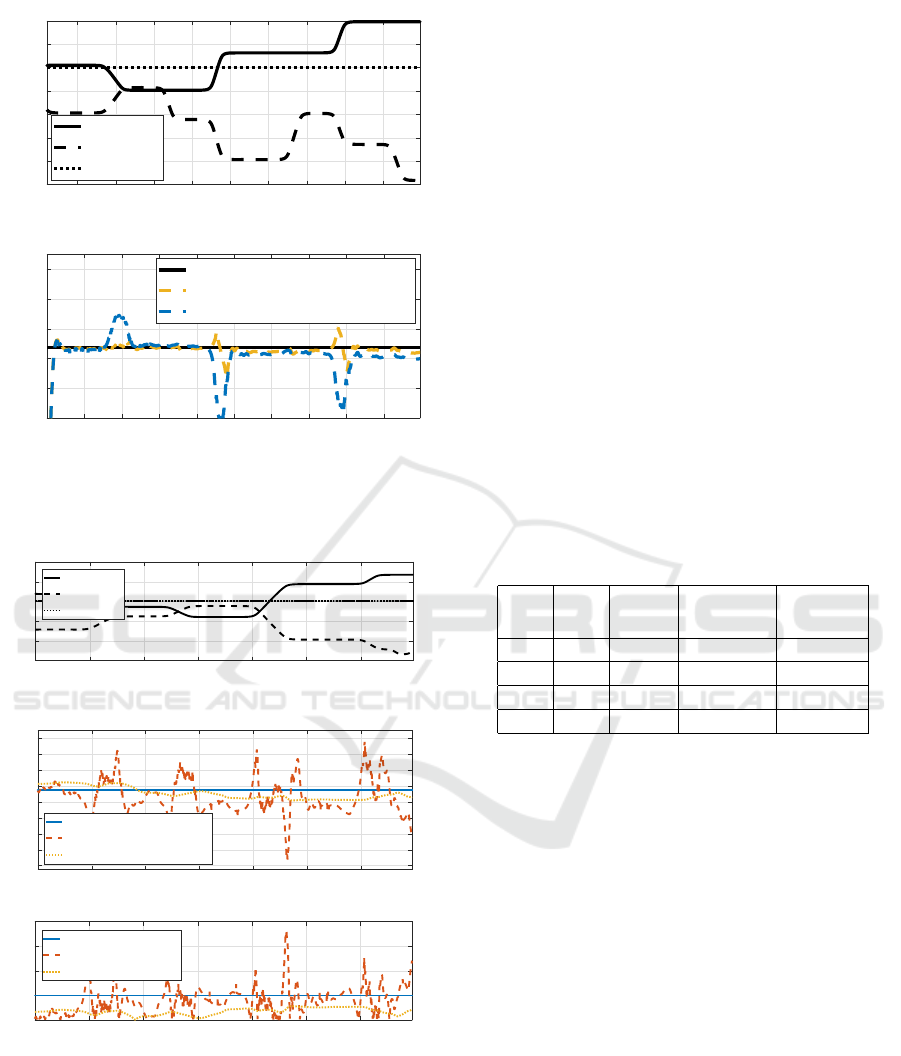
4.1 Hydraulic System
The results of the first experiment, described in Sec-
tion 3.1, are shown in the following figure:
The first graph shows the movement of the arm
and the implement in function of the time. The graph
bellow shows the computation of the arm revolute
joint torque for three different models: the torque with
damping directly computed from the setup pressure
measurements in blue, the ideal torque without damp-
ing computed from simulation with a virtual mass
0 10 20 30 40 50 60
Time [s]
-50
0
50
Position [deg]
Position of the joints
Arm
Implement
0 10 20 30 40 50 60
Time [s]
0
1
2
3
4
Torque [Nm]
10
4
Main Arm Revolute Joint
From Setup : with damping model
From Simulation
From Setup
Figure 10: Calibration of Hydraulic Cylinder damping force
model.
in orange and the new torque with reduced damp-
ing from the damping model also computed with the
setup measurements in yellow. It can be observed that
the curve with the damping model is not yet perfectly
matching the ideal torque from simulation but is al-
ready closer than the initial model without damping
force when the front-loader is moving. It is due to
the fact that the complexity of the physical model, in-
cluding several joints damping and friction, is simpli-
fied as one damping force on the hydraulic cylinder
joint. Section 4.2 will show the improvement made
on the payload estimation in dynamic condition using
the damping reduction approach. The new optimized
hydraulic damping parameters are listed in Table 1.
4.2 Payload Estimation
The improvement made in the hydraulic force com-
putation of the previous section is now linked to the
improvement on the payload estimation in the follow-
ing graph:
The first graph is again showing the arm and im-
plement position as well as the tractor pitch. In that
experiment the tractor was placed on a flat area with-
out pitch. In the second graph the estimated payload
ˆ
M from the initial model (in blue) and the model with
reduced impact of the damping (in yellow) are com-
pared to the actual value M
pl
(in black). Both mod-
els are giving a good accuracy when the joints are at
steady state. However, when the front-loader is dy-
namically excited, the method with damping model
is giving a more stable estimation because of the re-
duced impact of the damping that is unmodeled in
the payload estimation method. In that experiment,
the mean of the estimation error in percent
¯
E is re-
duced from 16.1% to 5.9% and
¯
E
MvRMS
from 12.8%
to 2.9%.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
274
5 10 15 20 25 30 35 40 45
Time [s]
-50
-40
-30
-20
-10
0
10
20
Joint position [deg]
Position of the joints
Arm
Implement
Pitch
0 5 10 15 20 25 30 35 40 45
Time [s]
0
200
400
600
800
1000
Mass [kg]
Payload estimation
Actual
Estimated with damping model
Estimated
Figure 11: Payload estimation: comparison with the damp-
ing model.
15 20 25 30 35 40 45
Time [s]
-60
-40
-20
0
20
40
Joint position [deg]
Position of the joints
Arm
Implement
Pitch
15 20 25 30 35 40 45
Time [s]
380
400
420
440
460
480
500
520
540
Mass [kg]
Payload mass, Mean of Error = 3.88 %
Mean of RMS Window Error = 1.70 %
Actual
Estimated
Estimated RMS Windows
15 20 25 30 35 40 45
Time [s]
0
5
10
15
20
Error [%]
Payload mass Estimation error
5% limit
Error
Error RMS Windows
Figure 12: Payload estimation overtime.
The payload estimation of the model with reduced
damping can be analysed in more details with an
other set of data. Here, in the Figure (12), the es-
timated payload
ˆ
M and the estimated moving RMS
value
ˆ
M
MvRMS
are compared to the actual mass M
pl
.
The third graph displays the absolute error in percent
of those two estimated quantities and a threshold of
5%. The estimated value is again giving a good accu-
racy with an error smaller than 5% with the joints at
steady-state. However, when the front-loader is mov-
ing, a higher error is still remaining because the im-
proved model has not fully removed the impact of the
damping as underlined in Section 4.1. However, it is
shown here that using the moving window RMS value
can drastically reduce the impact of those unmodeled
dynamics. The window RMS error value stays below
5% over the full experiment and has an average value
of 1.7% versus 3.9% for the absolute value. If the
payload in the implement of the construction vehicle
is not expected to dynamically change over time once
the vehicle is loaded, taking an average or a moving
window RMS value is a good solution to deal with
more complex unmodelled dynamic effects. Other-
wise, the method with reduced damping shows an ad-
vantage for the case when the payload is constantly
changing and moving. For example, an excavator that
is digging a hole. The operator should not necessar-
ily immobilize the front loader in order to check the
payload value, therefore improving the productivity.
Table 2: Payload estimation results for multiple values.
M
pl
¯
ˆ
M
¯
E
¯
ˆ
M
MvRMS
¯
E
MvRMS
[kg] [kg] [%] [kg] [%]
0 2 ∞ 17 ∞
100 115 19.56 109 15.49
200 207 6.96 206 4.40
475 467 3.88 471 1.70
Finally, the overall approach is validated with
multiple payload values. The Table (2) shows the
mean of the estimated mass
¯
ˆ
M and moving RMS mass
¯
ˆ
M
MvRMS
with the corresponding errors. While taking
a moving RMS value is still improving the estimation,
the accuracy decrease with the payload value. The er-
ror in percent is increasing for small payload, how-
ever the absolute error stay bellow 15kg A smaller
payload estimation is more sensitive to the unmod-
elled dynamic effects but also to the accuracy of the
pressure measurements, already including the mass of
the front loader relatively high with respect to a small
payload. However, small payload are less likely to
lead to a vehicle instability while the estimation for
high payload, between 500kg and 1500kg for a trac-
tor front-loader, is expected to be acceptable.
Real-Time Digital Twin for Construction Vehicle Stability Assessment and Visualization with Improved Front-Loader Payload Estimation
275

4.3 Stability Assessment and
Visualization
As introduced in the Section 3.3, the stability of a con-
struction vehicle can be correctly assessed with an ac-
curate estimation of the stability baseline, the COG
position and the suspension system. Regarding the
stability baseline, this one can be evaluated using an
IMU measurement. Secondly, the COG position ac-
curacy is here linked to the accuracy of the payload
estimation presented in Section 4.2.
Figure 13: Visualization towards the operator.
Figure (13) presents the visualization provided to
the operator. It displays the vehicle’s center of grav-
ity (COG), which shifts when the payload changes or
when the tractor adjusts its implement. The yellow-
shaded area represents the stability zone, defined as
the projection of the stability baseline (as discussed
in Section 4.3) along the direction of gravity. When
the COG approaches the boundary of this area, it turns
red, signaling an unstable condition and a heightened
risk of tipping. In addition, the visualization includes
numerical metrics, most notably the estimated pay-
load and the remaining allowable weight before insta-
bility is reached.
5 CONCLUSION
This paper presents the overall story of improvement
of construction vehicle stability assessment and visu-
alization by coupling a front-loader payload estima-
tion method with real-time multibody modeling. The
main goal was to show that the accuracy of multi-
body modelling, for example with MATLAB Sim-
scape Multibody software, can be used to improve a
payload estimation method based on simplified mo-
tion equations. This paper underlines those improve-
ments by reducing the impact of joints damping on the
payload estimation and by allowing to run in parallel
and in real-time a multibody model including suspen-
sions system and Center Of Gravity computation.
Regarding the payload estimation, the multibody
model is used to reduce the impact of joint damp-
ing by comparing joints torque from a physical setup
and the ideal joint torque without damping in simu-
lation. It therefore allows to quantify the impact of
damping and remove it from the physical setup joint
torque used for the payload estimation. The mean of
the estimation moving window RMS error can be re-
duced from 12.8% to 2.9%. For real-time integration
on a working vehicle, using such a solution with re-
duced impact of damping is better than just taking a
mean on a moving windows value for vehicles that
are constantly in movement or constantly changing
the payload (e.g. a excavator digging an hole or mov-
ing sand).
The payload estimation and stability assessment
have been integrated in a real-time system with a 3D
visualization that is designed to provide the vehicle
operator with intuitive feedback on stability, focus-
ing on tip-over risks in the pitch direction. Commu-
nication between system components was achieved
primarily through ROS and UDP. The system effec-
tively visualizes the vehicle’s center of gravity, stabil-
ity zone, and key metrics, allowing operators to mon-
itor and maintain safe operational conditions.
5.1 Outlook
The aims of this paper is to introduce a way to couple
accurate multibody modelling with a more simplified
payload estimation method using motion equations
and integrate it in a real-time system with a 3D visual-
ization. While some examples are demonstrated and
validated within this research, several other investiga-
tions and modelling improvement could be further ex-
plored. First, the modelling of a moving vehicle could
be developed. It allows to validate the impact of sus-
pension on the stability behaviour but could also be
used to improve the payload estimation method by re-
ducing the impact of vehicle roll and pitch in case no
IMU’s measurements are available. Moreover, adding
weight distribution measurement on the wheels of the
physical setup could allow a more accurate validation
of the center of gravity position and overall stability
assessment. Finally, the payload estimation method
could be further improved by modelling and reduc-
ing the impact of other unmodelled effects in the sim-
plified motion equations such as joint frictions, hy-
draulics delay, components flexibility, etc.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
276

ACKNOWLEDGEMENTS
This research is part of the CADAIVision SBO
project funded and supported by Flanders Make vzw,
the strategic research center for the manufacturing in-
dustry.
REFERENCES
AlliedMarketResearch (2024). Construction vehicles mar-
ket size, share, competitive landscape and trend anal-
ysis report, by solution, by equipment, by type, by ap-
plication and, by industry : Global opportunity anal-
ysis and industry forecast, 2023-2032. Construction
Vehicles Market.
Baker, V. and Guzzomi, A. L. (2013). A model and com-
parison of 4-wheel-drive fixed-chassis tractor rollover
during phase i. Biosystems Engineering, 116(2):179–
189.
Bennett, N., Walawalkar, A., and Schindler, C. (2014). Pay-
load estimation in excavators: Model-based evalua-
tion of current payload estimation systems.
Cordos¸, N. and TodoruT¸ , A. (2019). Influences of the sus-
pensions characteristics on the vehicle stability. In
Burnete, N. and Varga, B. O., editors, Proceedings
of the 4th International Congress of Automotive and
Transport Engineering (AMMA 2018), pages 808–
813, Cham. Springer International Publishing.
Cuong, D., Zhu, S., Hung, D., and Ngoc, N. (2013). Study
on the vertical stiffness and damping coefficient of
tractor tire using semi-empirical model. Hue Univer-
sity Journal of Science, 83:5–15.
Edwards, D., Parn, E. A., Sing, M. C., and Thwala, W. D.
(2019). Risk of excavators overturning: Determining
horizontal centrifugal force when slewing freely sus-
pended loads. Engineering, construction, and archi-
tectural management, 26(3):479–498.
Ferlibas, M. and Ghabcheloo, R. (2021). The 17th scandi-
navian international conference on fluid power. Hue
University Journal of Science.
Gralak, M. and Walu
´
s, K. (2024). A model of an extending
front loader. Applied Sciences, 14:3948.
Huo, D., Chen, J., Zhang, H., Shi, Y., and Wang, T. (2023).
Intelligent prediction for digging load of hydraulic ex-
cavators based on rbf neural network. Measurement,
206:112210.
Ishihara, S., Kanazawa, A., and Narikawa, R. (2021). Re-
alization of excavator loading operation by nonlinear
model predictive control with bucket load estimation.
In IFAC-PapersOnLine, volume 54, pages 20–25. El-
sevier Ltd.
Lysych, M. N. (2020). Study driving dynamics of the
machine-tractor unit on a virtual stand with ob-
stacles. Journal of Physics: Conference Series,
1515(4):42079–.
MarkwideResearch (2024). Construction vehicles mar-
ket analysis- industry size, share, research report, in-
sights, covid-19 impact, statistics, trends, growth and
forecost 2024-2032. Automotive and Transportation,
pages 1–263.
Mitrev, R. and Marinkovi
´
c, D. (2019). Numerical study
of the hydraulic excavator overturning stability during
performing lifting operations. Advances in mechani-
cal engineering, 11(5):168781401984177–133.
Murphy, D. (2022). Tractor Stability and Instability. https:
//extension.psu.edu/tractor-stability-and-instability.
Updated : July 15, 2022.
New Holland Agriculture (2024). Front Axle and
Suspension. https://agriculture.newholland.com/
apac/th-th/equipment/products/agricultural-tractors/
t7-heavy-duty/detail/front-axle-and-suspension.
Accessed: 2024-08-06.
Pavlov, N. and Dacova, D. (2021). A multibody model of
a wheel loader with pneumatic boom suspension and
proving ground testing. IOP Conference Series: Ma-
terials Science and Engineering, 1031:012009.
Robyns, S., Heerwegh, W., and Weckx, S. (2024). A dig-
ital twin of an off highway vehicle based on a low
cost camera. Procedia Computer Science, 232:2366–
2375. 5th International Conference on Industry 4.0
and Smart Manufacturing (ISM 2023).
Tafazoli, S., Lawrence, P. D., and Salcudean, S. E.
(1999). Identification of inertial and friction parame-
ters for excavator arms. IEEE Trans. Robotics Autom.,
15:966–971.
Zhu, Q., Yang, C., Hu, H., and Wu, X. (2021). Building a
novel dynamics rollover model for critical instability
state analysis of articulated multibody vehicles. Inter-
national Journal of Heavy Vehicle Systems, 28:329–
352.
Real-Time Digital Twin for Construction Vehicle Stability Assessment and Visualization with Improved Front-Loader Payload Estimation
277
