
Investigating the Safety Effects of Degraded Wireless Performance on
Connected Longitudinal Driver Assistance Functions
Roland Nagy
1,2 a
, Zsombor Peth
˝
o
1 b
, Tam
´
as M
´
arton Kaz
´
ar
1 c
, Tibor Tur
´
oczi
2
and
´
Arp
´
ad T
¨
or
¨
ok
1 d
1
Department of Automotive Technologies, Faculty of Transportation Engineering and Vehicle Engineering,
Budapest University of Technology and Economics, M
˝
uegyetem rkp. 3., H-1111 Budapest, Hungary
2
Jaguar Land Rover Hungary Ltd., Hungary
Keywords:
SNR, V2X, CACC, Safety Effect, Wireless Performance.
Abstract:
In the near future, Vehicle-to-Everything (V2X) based technologies will enable vehicles and other road users
to exchange information with each other, even in cases where the applicability of other sensors is limited. This
technology will be able to ensure the operation of advanced driver assistance systems, in cases where the other
sensors are malfunctioning. In such situations, where only wireless communication can be relied upon, it is
essential to be able to react to possible changes in network performance metrics. The objective of this paper
is to address the aforementioned problem by characterizing the safety-risk associated with vehicle dynamic
parameters and the factors influencing the network performance metrics in different scenarios. The network
can be divided into seven distinct layers that are responsible for data transmission, and the research primarily
focuses on the physical layer, with the objective of studying its impact on the packets sent. In the research,
the Signal-to-Noise Ratio (SNR) is considered to be the primary network influencing parameter. This will
facilitate the enhancement of not only the safety of transportation but also its reliability.
1 INTRODUCTION
In the near future, new technologies and develop-
ments will emerge in the automotive and transport in-
dustries to make them perform better and more effi-
cient. One of these technologies will be wireless com-
munication between vehicles and other road partici-
pants (Llatser et al., 2019). With this improvement,
vehicles will be able to exchange the necessary dy-
namic and static information with each other to in-
crease the safety awareness of a vehicle. Unlike other
environmental perception sensors (camera, radar) ve-
hicles equipped with V2X technology can detect ve-
hicles from all directions and use their data to create
a local dynamic map (LDM) to improve ad hoc deci-
sion making to mitigate safety risks and avoid traffic
accidents. To provide real-time wireless communica-
tion the IEEE 802.11p standard (IEEE, 2012) was in-
troduced to support safety-critical application such as
forward collision warning (FCW), cooperative adap-
a
https://orcid.org/0009-0003-8623-275X
b
https://orcid.org/0000-0003-3054-4669
c
https://orcid.org/0009-0002-3247-2646
d
https://orcid.org/0000-0002-1985-4095
tive cruise control (CACC) and blind spot warning
(BSW) (Mannoni et al., 2019). Building on its foun-
dation, the emerging IEEE 802.11bd standard (Xue
et al., 2024) aims to enhance performance by offer-
ing higher data rates, improved reliability, and back-
ward compatibility, making it a promising solution for
next-generation vehicular communication systems.
Vehicle-to-vehicle (V2V)-based safety commu-
nication can effectively support non-line-of-sight
(NLoS) scenarios by using relay techniques and
multi-hop communication to bypass obstacles and
maintain connectivity between vehicles. Although
there are some major limitations of wireless transmis-
sion, such as signal attenuation (fading, path loss (Bae
et al., 2020)) due to obstructed visibility, interference
from other wireless devices or environmental factors
and these have a direct impact on Quality of Service
(QoS).
The degraded QoS in V2V communications di-
rectly affects the reliability and efficiency of data
exchange between vehicles, influencing by factors
such as transmission latency and packet loss. Inad-
equate Packet Delivery Ratio (PDR) can compromise
the availability of critical safety information, poten-
tially increasing the risk of accidents and reducing the
278
Nagy, R., Pethõ, Z., Kazár, T. M., Turóczi, T. and Török, Á.
Investigating the Safety Effects of Degraded Wireless Performance on Connected Longitudinal Driver Assistance Functions.
DOI: 10.5220/0013088400003941
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 11th Inter national Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 278-285
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

effectiveness of advanced driver assistance systems
(ADAS) and automated driving functions (ADF) (Cui
et al., 2018).
The validation of V2X communication-based ap-
plications necessitates the creation of a substantial
number of test and evaluation scenarios. This can be
achieved through a combination of analytical, simu-
lation, and prototyping techniques.
In order to develop a functional simulation envi-
ronment and a reliable and robust feature, it is essen-
tial to conduct a comprehensive review of the exist-
ing literature on this topic. In the study conducted
by (Saponara and Gagliardi, 2018) a simulation envi-
ronment was created in Simulink where they are able
to test the reliability of V2X communication. Further-
more, they compared the simulation results with ex-
perimental results. The proposed tool may prove use-
ful in studying the impact of vehicle distance, speed
and operating scenario on the reliability of the com-
munication system. In their article, (Xing et al., 2019)
proposed a method where the CACC model considers
communication delay and is able to reduce the mini-
mum string-stable time gap. This was achieved by a
Smith predictor and introducing a master-slave archi-
tecture. The results were validated by simulation, but
other factors such as packet reception were not taken
into account.
In their study, (de Almeida et al., 2022) conducted
a comparative analysis of the results obtained from
the utilisation of commercial On-Board Units (OBUs)
and Road-Side Units (RSUs) data, with those de-
rived from the application of diverse simulation soft-
ware. The authors concentrated on three key metrics:
maximum communication range, packet delivery ra-
tio and inter-reception time. These were evaluated
while varying the vehicle speeds within an 802.11p
domain. However, in this study, the effect of noise on
the communication network was not investigated.
(Shagdar et al., 2017) carried out an analysis of
Cooperative Awareness Message (CAM) messages
for CACC using the IEEE 802.11p standard. They
investigated the potential of the CAM for platooning
and demonstrated that V2V communication could fa-
cilitate the formation of a stable platoon in highway
scenarios. They compared their analytical results with
those obtained from NS-3, but their focus was on the
impact of road density on communication, rather than
on the effects of noise.
In (Bae et al., 2020), the researchers evaluated
the performance of Dedicated Short-Range Commu-
nication (DSRC) based V2X technology on real test
tracks in multiple Line-of-sight (LoS) and NLoS sce-
narios. They assessed various key performance indi-
cators (KPIs), such as Packet Error Rate (PER), Re-
ceived Channel Power Indicator (RCPI), Packet Re-
ception Rate (PRR). The research proved that the
PRR is significantly higher in LoS scenarios. Authors
also emphasize that in the future they would like to
evaluate the performance of the next generation short-
range communication protocol like 802.11bd which
will provide services for autonomous driving such as
sharing sensor information. To evaluate this large
messages will require new methods.
Knowle et al. (Knowles Flanagan et al., 2021) in-
vestigated V2V communication performance and its
impact on safety distance. They were able to demon-
strate the importance of a reliable network as a key to
reducing stopping distance and reaction time.
Fitah et al. (Fitah et al., 2018) evaluated the per-
formance of 802.11a (Wi-Fi) and 802.11p (DSRC)
communication protocols for Intelligent Transport
Systems. Their results showed that the DSRC proto-
col outperformed the Wi-Fi protocol in the scenarios
they performed. They used multiple simulation tools
like ns-3 for network and SUMO for traffic simula-
tion, but for a safety critical application vehicle dy-
namics is essential which was not performed.
In (Rayamajhi et al., 2018), the authors conducted
three different experiments to investigate the perfor-
mance of DSRC in real-world and on CACC. They
considered thoughput, latency and characteristics of
the packet loss process for these experiments which
they validated through laboratory and experimental
tests. However, they are not focused on additional
interference effect on CACC.
In this book chapter (Fallah and Gani, 2018) the
authors evaluated the high fidelity DSRC physical
layer modelling tools and the radio channel modelling
approaches, including the discussion about channel
propagation models (path loss, shadowing and fading
effects). However, the impact of vehicle dynamics on
wireless communication was not considered.
In (Mannoni et al., 2019), the group of researchers
compared the Cellular and DSRC technology and ex-
amined the network physical layer. They also applied
widely used indicators for the evaluation such as PER,
SNR and latency for both version of V2X. Also they
evaluated the vehicle density on the communications
and when its increasing, then the performance gap is
reduced between Cellular and DSRC.
Lian Cui and colleagues (Cui et al., 2018) evalu-
ated a CACC under cyber attack and proposed a simu-
lation platform to examine the effects of such attacks.
The research considered multiple parameters, includ-
ing vehicle dynamics, sensor errors, and communica-
tion latencies. The platform proposed in the paper is
capable of quantifying the crash severity. The conclu-
sion notes that cyber attacks do not always result in
Investigating the Safety Effects of Degraded Wireless Performance on Connected Longitudinal Driver Assistance Functions
279

crashes, and that GPS jamming is the most dangerous
cyber-attack for CACC-based platoons.
Most studies focus on latency and other parame-
ters that affect the network, and do not directly con-
sider the impact of noise levels, which are often the
cause of random communication failures. This study,
therefore, aims to investigate the impact of the SNR
on the physical transmission process (link-level per-
formance), with a specific focus on the packet deliv-
ery ratio (PDR).
The objective of this research is to examine the
various modulation effects, path loss, shadowing and
other noise factors that can impair wireless communi-
cation performance.
1.1 Main Contribution
The primary contribution of this work is the devel-
opment of a MATLAB Simulink-based DSRC simu-
lation platform that enables the evaluation of driver
assistance functionality under degraded wireless net-
work conditions in safety-critical scenarios. On the
other hand, a significant contribution is the impact
analysis of the SNR on the number of packets deliv-
ered, providing insight into how different SNR levels
affect the reliability and efficiency of safety-critical
data dissemination. For CACC application, reliability
and latency are critical performance metrics. Based
on 5GAA technical report (5G Automotive Associa-
tion (5GAA), 2023), reliability is defined as 99.9%,
ensuring that almost all control messages are success-
fully delivered to maintain seamless and synchronized
vehicle coordination. In addition, the latency require-
ment for acceleration and deceleration control is set
at 10 ms, emphasizing the need for ultra-low delay
to support real-time responsiveness and safety in dy-
namic traffic scenarios. The technical report specifies
C-V2X service level requirements, but is also appli-
cable to DSRC.
2 METHODOLOGY
In this research we used Matlab Simulink 2023b to
simulate a DSRC communication physical layer to
perform V2V communication. MATLAB Simulink is
well-suited for the analysis of the impact of degraded
V2V communication on driver assistance functions.
This is due to its ability to seamlessly integrate de-
tailed communication models with vehicle dynamics
and control systems in a single environment. This en-
ables precise simulation of time-sensitive interactions
between communication delays, packet loss, and driv-
ing behaviour. The following figure presents the four
main blocks of our model which performs the simula-
tion.
Figure 1: Simplified methodology diagram.
2.1 Vehicle Dynamics Model
The vehicle model used for this research is a six-
degree-of-freedom model, powered by a single elec-
tric motor on the rear axle. This model was selected
to enable the simulation of more complex vehicle dy-
namics in a variety of scenarios and for future re-
search. In addition to the dynamics, the vehicle con-
trol is also located here, where it performs the adap-
tive longitudinal control of the vehicle under test. In
this paper, we utilise a CACC system, which receives
inputs from a wireless network and subsequently con-
verts the acceleration data into torque, which is then
fed back into the vehicle dynamic model to calculate
the vehicle speed and position.
2.2 Scenario Management Module
Figure 2: Implemented scenarios.
This block is responsible for the initialization and ex-
ecution of all scenarios. It simulates the positions and
velocities of the different actors and cooperates with
the vehicle dynamic block. For the purposes of our
research, we conducted multiple scenarios to evaluate
the impact of varying SNR values on network perfor-
mance. Accordingly, testing under degraded commu-
nication conditions is important is that we need reli-
able information on how much we can rely on V2X
communication while the other environmental sen-
sors are partly or completely unavailable. In the sce-
narios presented in 2, only V2X wireless commu-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
280
nication was used, as the focus of this research was
to evaluate the effectiveness of wireless communica-
tion with added interference without the presence of
additional environmental sensors. In these scenarios,
we distinguished between two vehicles, which we de-
fined as the ”host vehicle” (HV) and the ”remote ve-
hicle” (RV).
In order to simulate the effects of noise on the per-
formance of the network, we have considered a range
of different noise levels. This allows us to evaluate the
impact of noise on a connected driver assistance fea-
ture. The additional noise levels that we have chosen
are as follows: 0 dB, 10 dB, 20 dB, 25 dB.
2.3 DSRC Communication
This section serves as the central area of our re-
search, focusing on facilitating wireless communica-
tion among vehicles. For the simulation, we created
a basic frame which contains the necessary parame-
ters. These include the 3-dimensional positions, ve-
locities, angular velocities and the roll, pitch, yaw
indexes. Furthermore, it contains the actor IDs and
timestamps, with 3 additional slots for other param-
eters. These 18 parameters were then translated into
16-bit integers. In terms of bit size, this correlates
with the size of a CAM basic container field, where
the vehicle parameters are stored (ETSI, 2014). Ini-
tially, we need to establish the methodology for com-
puting and adjusting the SNR value. Throughout our
study, the transmission power remained fixed at 23
dBm, a default parameter for DSRC communication.
Since our main goal is to assess how SNR affects
packet delivery, it is crucial to determine the receiv-
ing power according to Eq. 1.
P
R
= P
T
− FSPL − X
σ
(1)
FSPL = 10 · log
10
4 · π · d · f
c
c
2
(2)
The free space path loss (FSPL) (Ghasemi et al.,
2016) is a straightforward method for simulating the
message power attenuation between the transmitting
and receiving sides . In Eq. 2, we consider the dis-
tance between two antennas (d), the carrier frequency
( f
c
) and the speed of light (c). In the research we used
the single-slope model. Based on the measurements
of Kryszkiewicz et al (Kryszkiewicz et al., 2022) the
difference between the characteristics of a single- and
a double-slope model was insignificant. At distances
exceeding 200 meters, ground reflections begin to in-
duce modifications to the path loss model. This is
the reason why the focus of control is maintained be-
low this threshold, in order to ensure the safe opera-
tion of the CACC application. Shadowing (X
σ
) uses a
log-normal random distribution with zero mean. For
our research we used 3.7 dB for standard deviation
(Kryszkiewicz et al., 2022). After we know the re-
ceiving Power we can finally calculate the SNR for
the communication (see in Eq. 3). This can be done
as follows:
SNR = P
R
− N
0
(3)
N
0
= N
thermal
+ N
other
(4)
The performance of background noise can be af-
fected by a number of factors, including ambient
noise and radio frequency interference. In the present
study, thermal noise was used as the main noise
source and its value was calculated as follows:
N
thermal
[dB] = 10 · log
10
(1000 · k · T · B) (5)
In order to conduct our study, we considered the
10 MHz bandwidth (B), which is dedicated for DSRC
communication, and an ideal 297 K temperature (T).
The last element of the equation is the Boltzmann
constant (k). This allows us to calculate the SNR
value by subtracting the noise from our receiving
power. In our study, we evaluated the impact of vary-
ing SNR values on network performance. To this end,
we considered additional interference (N
0
) values that
would degrade the network.
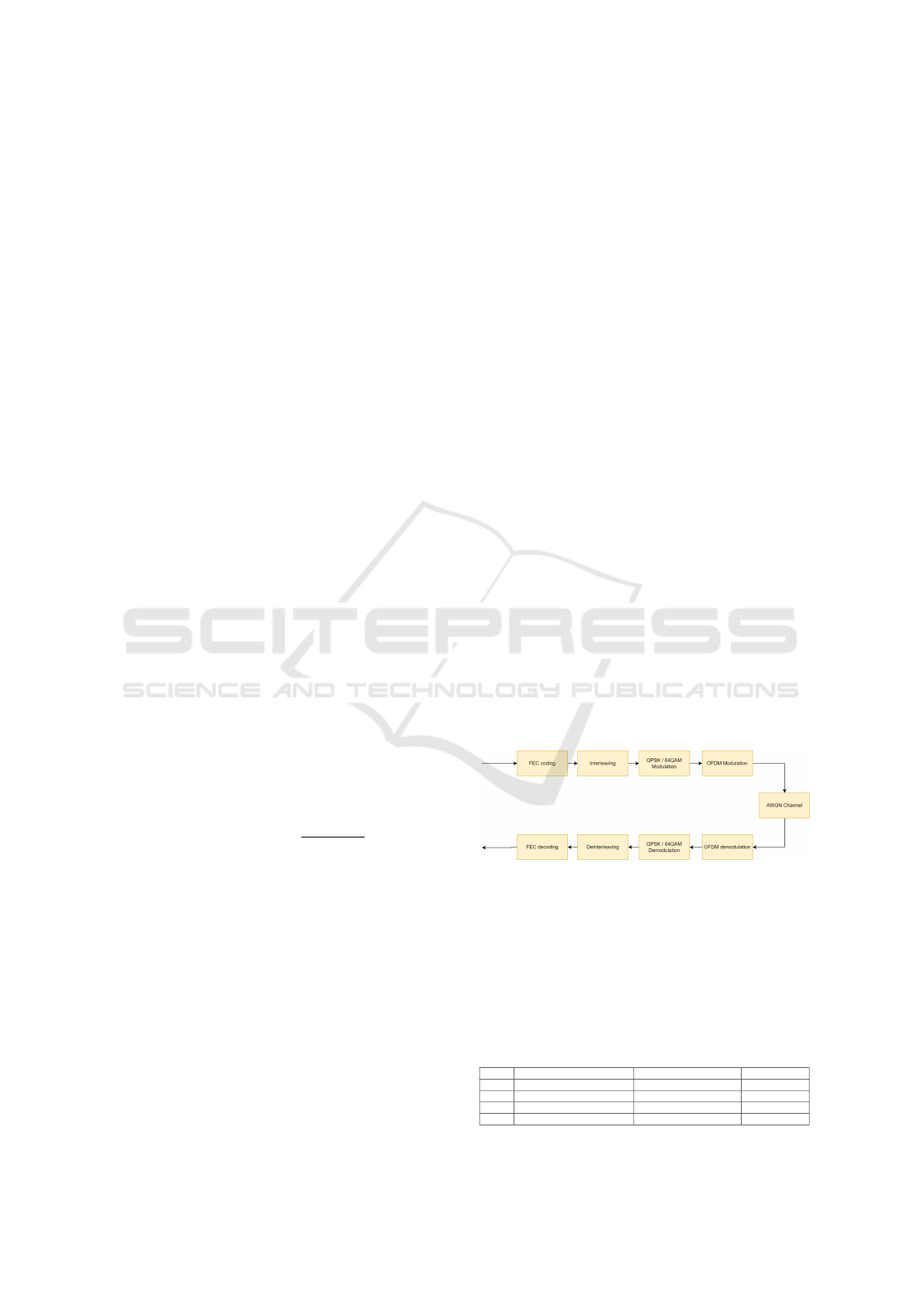
In the second stage of the process, the requisite
data must undergo an intricate series of transforma-
tions before reaching the ego vehicle. Our approach
involved following the IEEE 802.11p standard to es-
tablish the physical layer of DSRC communication in
Simulink, as demonstrated in Fig. 3.
Figure 3: Bit stream through physical layer.
Once the requisite data has been converted into
bits, forward error correction (FEC) is applied to
the bit stream, contingent on the chosen modulation
mode. In our paper we have selected 4 different mod-
ulations, as in Table 1, covering a significant transmis-
sion distance in the operating range of DSRC commu-
nication.(Bazzi et al., 2017)
Table 1: Different modulations.
Mode Coding rate and modulation Receiver sensitivity [dB] LoS range [m]
1 1/2 QPSK -82 541
2 3/4 QPSK -80 439
3 2/3 64QAM -69 139
4 3/4 64QAM -68 125
Investigating the Safety Effects of Degraded Wireless Performance on Connected Longitudinal Driver Assistance Functions
281
Following the FEC coding, interleaving is em-
ployed to prevent the occurrence of long sequences
of adjacent noisy bits. The required modulations are
then applied to the bitstream before it is transmitted to
the channel. The chosen Orthogonal Frequency Divi-
sion Multiplexing (OFDM) modulation (see Table 2
is applied last, prior to transmission. In order to sim-
ulate the effects of environmental noise on the mes-
sage, we have incorporated additive white Gaussian
noise (AWGN) into the channel. The default parame-
ters for OFDM modulation were employed, in accor-
dance with the standard specified in 802.11p (IEEE,
2012).
Table 2: OFDM modulation parameters.
Data subcarriers 48
FFT length 64
Guard bands (left-right side) 6-5
DC null yes
Pilot subcarriers (positions) 4 (12, 26, 40, 54)
Cyclic prefix 16
OFDM symbol 6 (QPSK), 2 (64QAM)
At the receiving end, the process of decoding the
message is opposite to that of encoding. Initially,
the receiving device assesses the message reception
power and, if it is below the receiving sensitivity
threshold, our simulation assumes that the message
has not been received. Conversely, if the reception
power is above the sensitivity threshold, the device
attempts to decode the message. Decoding is a cru-
cial aspect of this layer, as it enables the recipient to
obtain the information they require from the sender.
2.4 Network Monitoring Module
The network monitoring module performs the calcu-
lation of network performance metrics like PDR or
PRR for the whole process. The PDR provides a last
second mean value, which is essentially a sliding win-
dow method-based aggregation. Without this module,
it would not be possible to evaluate the network per-
formance. In the future, this could be expanded to
include communication delays and other parameters,
which could be essential for testing V2X-based con-
trol solutions and support application testing and val-
idation.
3 RESULTS AND DISCUSSION
In our research, we conducted multiple scenarios to
assess the impact of varying SNR values on network
performance and to examine their effects on differ-
ent modulations. Each scenario involved a simulation
time of 50 seconds (CAM transmit frequency was 10
Hz, resulting in 500 packets transmitted) and com-
menced with the HV’s initial velocity set at 20 m/s.
Subsequently, in the CACC system, the HV acceler-
ated to a predefined speed according to the scenario.
To ensure the smooth functioning of the CACC sys-
tem, the algorithm assumes that a vehicle is leading
at a given distance (in our case, 300 meters) if no
neighboring vehicles are actively transmitting mes-
sages. Once the first packet is successfully received,
the perception module can then calculate the relative
distance between the RV and HV positions. To ad-
dress the fact that CACC alone is not designed to
bring the vehicle to a complete stop, we incorporated
a basic Autonomous Emergency Brake (AEB) into the
model. This functionality triggers when the time-to-
collision (TTC) between the vehicle and an obstacle
ahead is less than 1.8 seconds. Upon activation, the
AEB applies full brake force, halting the vehicle and
maintaining it in a stationary position until the end of
the simulation.
Orange highlighting in Table 3 and Table 4 shows
where even AEB could not stop in time.
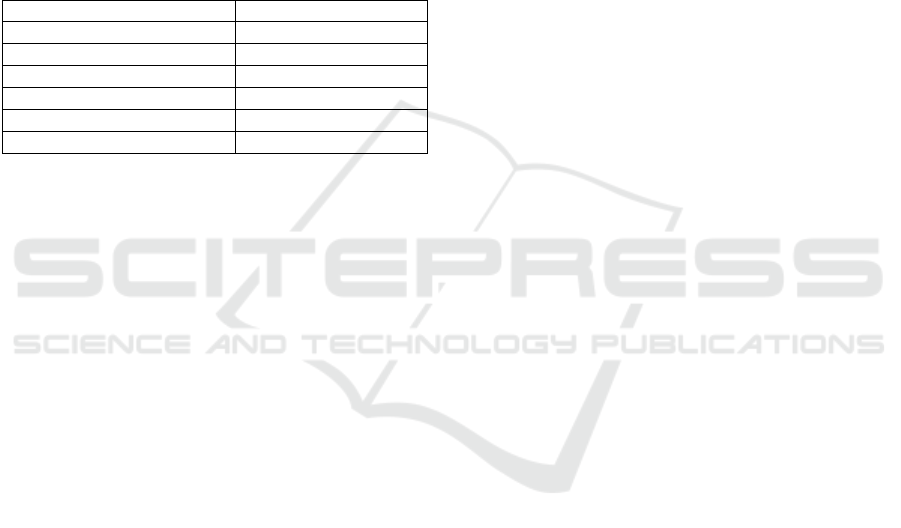
3.1 Moving Target with Constant
Velocity
In our research, we aimed to provide a more realistic
use case scenario for CACC. The results of the net-
work analysis are presented in Table 3. In this sce-
nario, the velocity difference between the two vehi-
cles was 13.89 m/s. Initially, under stable network
conditions, all modulations yielded similar results,
and the CACC system effectively adjusted to the ve-
locity of the RV, as illustrated in Fig 4. Subsequently,
we intentionally introduced gradual degradation into
the network. At an additional 10 dB of noise, the
QPSK modulation remained unaffected. However,
with the 64QAM modulation, there was a noticeable
delay in receiving the first packet. The system re-
ceived the first correct message at a distance of about
100 meters. Despite this delay, the CACC system was
still able to respond adequately, thus averting a poten-
tial collision. As the noise level increased to 20 dB,
a number of significant changes were observed. The
reception distance for QPSK modulation was found
to be halved, while there was also observable shifting
among different coding rates. With 64QAM modula-
tion, the reception distance dropped below 25 metres,
necessitating intervention from the AEB. A notable
difference was observed between the coding rates.
While a coding rate of 2/3 enabled the vehicle to stop
in time, a rate of 3/4 resulted in the vehicle being un-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
282
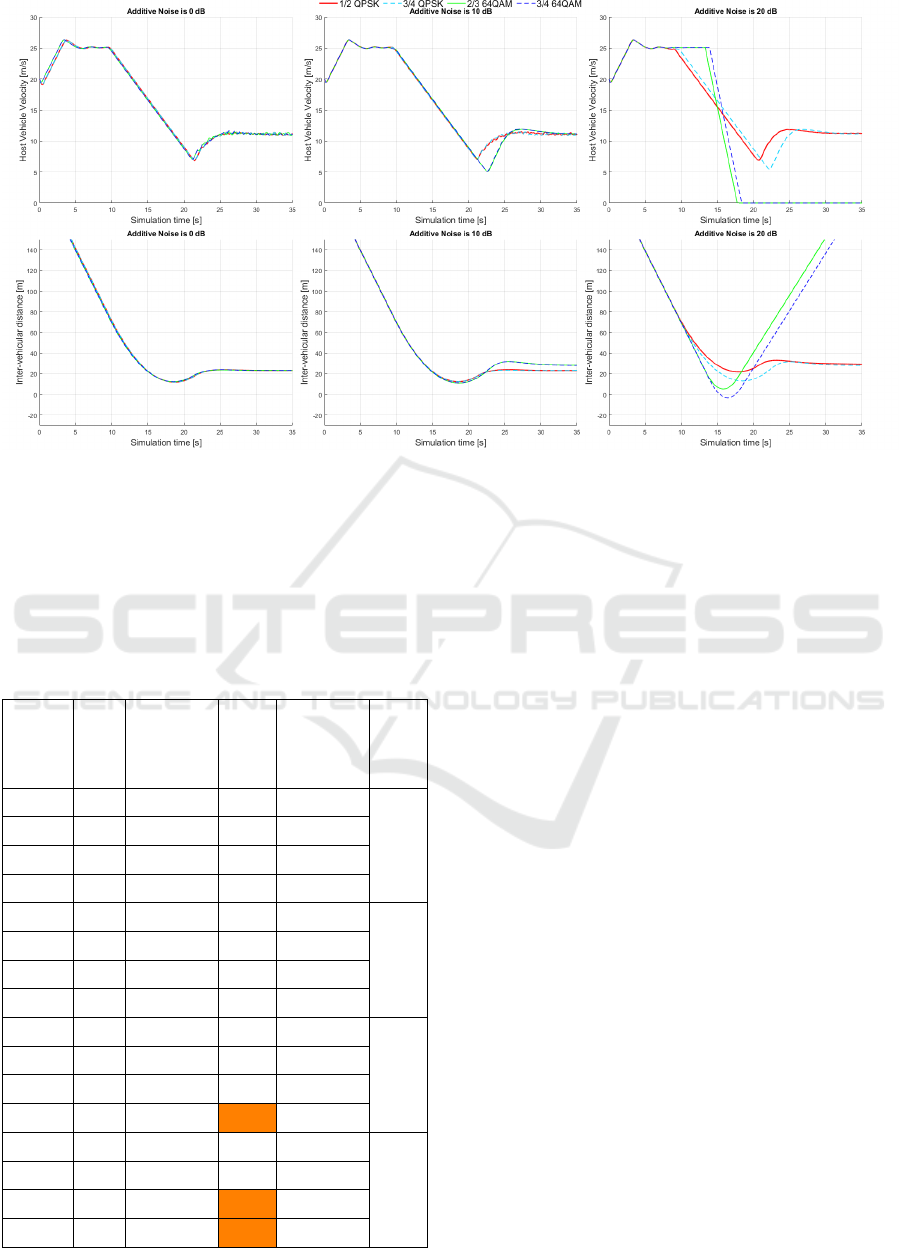
Figure 4: Host Vehicle Velocity and Relative Distance - Moving scenario.
able to stop even with AEB activation. Further de-
grading the network to an additional noise level of
around 25 dB, the AEB activates in all scenarios. This
occurs because the CACC system lacks the capability
Table 3: Results - Moving remote vehicle (HV velocity 25
m/s, RV velocity 11.11 m/s. Sent packets 501, Simulation
time 50 seconds).
Received
packets
PRR
[%]
First
reception
distance
[m]
min
TTC
[s]
Coding rate
and
modulation
Inter-
fer-
ence
level
501 100.0 200.5 3.77 1/2 QPSK
0 dB
501 100.0 200.5 3.77 3/4 QPSK
466 93.0 198.6 3.85 2/3 64QAM
458 91.4 198.6 3.86 3/4 64QAM
492 98.2 198.6 3.85 1/2 QPSK
10 dB
479 95.6 198.6 3.85 3/4 QPSK
396 79.0 87.1 3.62 2/3 64QAM
385 76.8 87.1 3.66 3/4 64QAM
412 82.2 101.7 5.18 1/2 QPSK
20 dB
398 79.4 89.1 3.97 3/4 QPSK
43 8.6 22.7 0.96 2/3 64QAM
57 11.4 13.6 0.22 3/4 64QAM
88 17.6 57.4 1.76 1/2 QPSK
25 dB
66 13.2 43.3 1.64 3/4 QPSK
47 9.4 13.1 0.22 2/3 64QAM
46 9.2 8.6 0.15 3/4 64QAM
to adapt to the velocity of the leading vehicle in time.
While accidents are avoided during QPSK modula-
tion, only the impact velocity can be mitigated with
QAM modulation.
3.2 Stationary Target
In this test, our aim was to simulate a worst-case sce-
nario where the RV is stationary, allowing us to as-
sess the maximum reception distance of various cod-
ing schemes. Similarly with the previous scenario, the
results are presented by Table 4. When the SNR re-
mained unaffected by additional noise, clear distinc-
tions between different modulations emerged. QPSK
modulation successfully received the first message
at approximately 500 meters, which represents the
maximum distance between the two vehicles. How-
ever, 64QAM modulation only managed to receive
the message at around 200 meters. The difference be-
tween coding rates was minimal, with only a slight
variation observed in PRR, amounting to just a few
percentage points. As the network became noisier,
reception deteriorated significantly. With a 10 dB in-
crease in noise, the reception distance halved, leading
to a noticeable decline in PRR. Further degradation
of the network resulted in delayed activation of safety
features. In the case of the more complex 64QAM
modulation, from a 20 dB increase in noise, the sys-
tem failed to stop the vehicle in time, even with AEB
intervention. The high PRR values observed in these
scenarios can be explained by the fact that the AEB
stopped the vehicle in the reception zone (regardless
of whether a collision occurred), therefore the HV
Investigating the Safety Effects of Degraded Wireless Performance on Connected Longitudinal Driver Assistance Functions
283
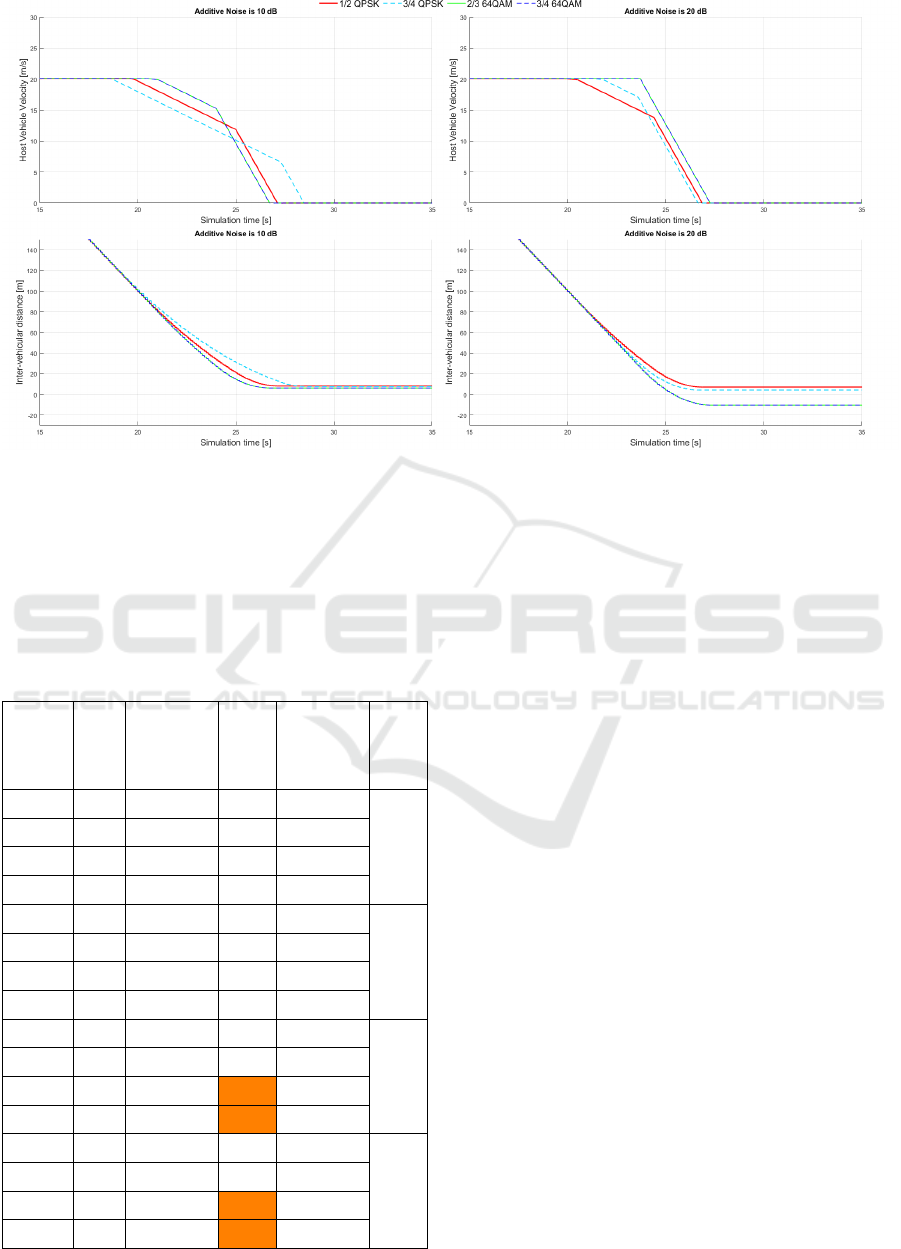
Figure 5: Host Vehicle Velocity and Relative Distance - Stationary scenario.
continued to receive messages after reaching the sta-
tionary position. In case of highest additional noise
the HV stopped outside of reception zone resulting in
low PRR.
Table 4: Results - Stationary remote vehicle (HV velocity
20 m/s, Sent packets 501, Simulation time 50 seconds).
Received
packets
PRR
[%]
First
reception
distance
[m]
min
TTC
[s]
Coding rate
and
modulation
Inter-
fer-
ence
level
498 99.4 497.6 1.53 1/2 QPSK
0 dB
493 98.4 495.6 1.52 3/4 QPSK
333 66.5 206.0 5.60 2/3 64QAM
326 65.1 206.0 5.60 3/4 64QAM
383 76.4 340.2 1.71 1/2 QPSK
10 dB
365 72.9 272.1 1.76 3/4 QPSK
281 56.1 91.7 1.48 2/3 64QAM
288 57.5 91.7 1.48 3/4 64QAM
293 58.5 103.7 1.59 1/2 QPSK
20 dB
282 56.3 75.6 1.25 3/4 QPSK
261 52.1 25.5 0.15 2/3 64QAM
253 50.5 25.5 0.15 3/4 64QAM
275 54.9 51.6 0.47 1/2 QPSK
25 dB
272 54.3 47.6 0.56 3/4 QPSK
19 3.8 11.5 0.12 2/3 64QAM
12 2.4 11.5 0.12 3/4 64QAM
4 CONCLUSION
In our study, we investigated the impact of variations
in SNR on transmitted packets and examined the ef-
fect of different noisy network conditions on a safety-
focused driver assistance feature (CACC). Our find-
ings align with previous research, indicating that as
SNR decreases, the operational range of more com-
plex modulations also decreases. Furthermore, we de-
veloped a simulation environment suitable for future
V2X-based developments. In the future, our objective
is to further improve the available control concepts
utilising network performance metrics to mitigate the
severity of various scenarios. Furthermore, we in-
tend to expand our simulation platform to include la-
tency assessment throughout the packet sending pro-
cess. This extension will provide a more comprehen-
sive understanding of the system’s performance and
aid in developing future V2X systems. The forthcom-
ing iteration of the proposed system may be utilised
in scenarios of greater complexity. This would re-
quire the simulation of transmission in a more dense
environment, thereby enabling an investigation into
the manner in which the diverse wireless communic
ation-based driver assistance systems respond to al-
terations in their surrounding environment.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
284

ACKNOWLEDGEMENTS
This work was supported in part by the Ministry
of Innovation and Technology National Research,
Development and Innovation Office (NRDI) within
the framework of the Autonomous Systems National
Laboratory Program RRF-2.3.1-21-2022-00002.
Supported by the
´
UNKP-23-4-I-BME-158 New
National Excellence Program of the Ministry for Cul-
ture and Innovation from the source of the National
Research, Development and Innovation Fund.
The study was prepared with the professional sup-
port of the Doctoral Student Scholarship Program of
the Co-operative Doctoral Program of the Ministry
for Innovation and Technology from the source of
the National Research, Development and Innovation
Fund.
This work was supported by Jaguar Land Rover
Hungary Ltd organization.
REFERENCES
5G Automotive Association (5GAA) (2023). TR C-V2X
Use Cases and Service Level Requirements Vol III
V1.0. Technical report, 5GAA.
Bae, J.-K., Park, M.-C., Yang, E.-J., and Seo, D.-W.
(2020). Implementation and performance evalua-
tion for DSRC-based vehicular communication sys-
tem. IEEE Access, 9:6878–6887.
Bazzi, A., Masini, B. M., and Zanella, A. (2017). Coop-
erative awareness in the internet of vehicles for safety
enhancement. EAI Endorsed Transactions on Internet
of Things, 3(9):e5–e5.
Cui, L., Hu, J., Park, B. B., and Bujanovic, P. (2018).
Development of a simulation platform for safety im-
pact analysis considering vehicle dynamics, sensor
errors, and communication latencies: Assessing co-
operative adaptive cruise control under cyber attack.
Transportation research part C: emerging technolo-
gies, 97:1–22.
de Almeida, T. T., de Carvalho Gomes, L., Ortiz, F. M.,
J
´
unior, J. G. R., and Costa, L. H. M. K. (2022). Com-
parative Analysis of a Vehicular Safety Application
in NS-3 and Veins. IEEE Transactions on Intelligent
Transportation Systems, 23:620–629.
ETSI, E. (2014). 302 637-2 v1. 3.1-intelligent transport
systems (ITS); vehicular communications; basic set
of applications; part 2: Specification of cooperative
awareness basic service. ETSI, Sept.
Fallah, Y. P. and Gani, S. M. O. (2018). Efficient and High
Fidelity DSRC Simulation. Wireless Networks.
Fitah, A., Badri, A., Moughit, M., and Sahel, A. (2018).
Performance of DSRC and WIFI for Intelligent Trans-
port Systems in VANET. Procedia Computer Science,
127:360–368.
Ghasemi, A., Abedi, A., and Ghasemi, F. (2016). Propa-
gation Engineering in Wireless Communications, Sec-
ond Edition. Springer.
IEEE (2012). IEEE Standard for Information technology–
Telecommunications and information exchange be-
tween systems Local and metropolitan area networks–
Specific requirements Part 11: Wireless LAN Medium
Access Control (MAC) and Physical Layer (PHY)
Specifications.
Knowles Flanagan, S., Tang, Z., He, J., and Yusoff, I.
(2021). Investigating and modeling of cooperative
vehicle-to-vehicle safety stopping distance. Future In-
ternet, 13(3):68.
Kryszkiewicz, P., Sroka, P., Sybis, M., and Kliks, A.
(2022). Path loss and shadowing modeling for
vehicle-to-vehicle communications in terrestrial TV
band. IEEE Transactions on Antennas and Propaga-
tion, 71(1):984–998.
Llatser, I., Michalke, T., Dolgov, M., Wildsch
¨
utte, F., and
Fuchs, H. (2019). Cooperative automated driving use
cases for 5G V2X communication. In 2019 IEEE 2nd
5G World Forum (5GWF), pages 120–125. IEEE.
Mannoni, V., Berg, V., Sesia, S., and Perraud, E. (2019). A
comparison of the V2X communication systems: ITS-
G5 and C-V2X. In 2019 IEEE 89th Vehicular Technol-
ogy Conference (VTC2019-Spring), pages 1–5. IEEE.
Rayamajhi, A., Biron, Z. A., Merco, R., Pisu, P., Westall,
J. M., and Martin, J. (2018). The impact of dedicated
short range communication on cooperative adaptive
cruise control. In 2018 IEEE International Confer-
ence on Communications (ICC), pages 1–7. IEEE.
Saponara, S. and Gagliardi, A. (2018). Modeling and analy-
sis of 802.11p physical layer for V2X connected trans-
port systems considering harsh operating conditions
and HW device performance. In 2018 International
Conference of Electrical and Electronic Technologies
for Automotive, pages 1–6. IEEE.
Shagdar, O., Nashashibi, F., and Tohme, S. (2017). Perfor-
mance study of CAM over IEEE 802.11p for cooper-
ative adaptive cruise control. In 2017 Wireless Days,
pages 70–76. IEEE.
Xing, H., Ploeg, J., and Nijmeijer, H. (2019). Compensa-
tion of communication delays in a cooperative ACC
system. IEEE Transactions on Vehicular Technology,
69(2):1177–1189.
Xue, S., Gong, S., and Li, X. (2024). A Comparative Study
of IEEE 802.11bd and IEEE 802.11p on the Data Dis-
semination Properties in Dynamic Traffic Scenarios.
Applied Sciences.
Investigating the Safety Effects of Degraded Wireless Performance on Connected Longitudinal Driver Assistance Functions
285
